- Автоматическое выделение объектов в данных лазерного сканирования

Содержание
- 2. Применение лазерного сканирования Навигация мобильных роботов Создание моделей зданий Картография и паспортизация Контроль качества продукции Сохранение
- 3. Цели работы Провести обзор методов классификации лазерных сканов Разработать алгоритм классификации лазерных сканов на основе машинного
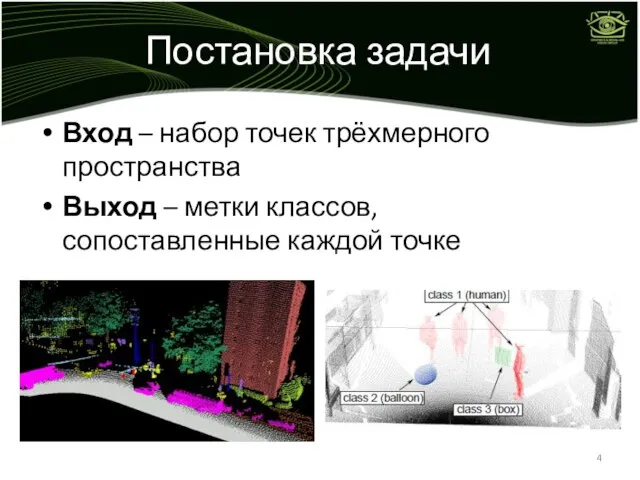
- 4. Постановка задачи Вход – набор точек трёхмерного пространства Выход – метки классов, сопоставленные каждой точке
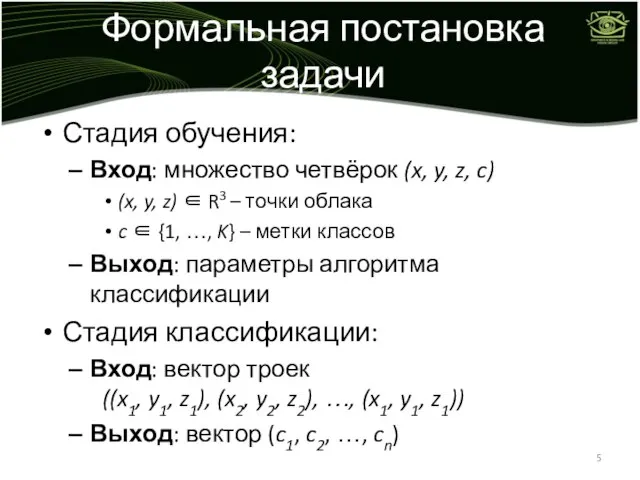
- 5. Формальная постановка задачи Стадия обучения: Вход: множество четвёрок (x, y, z, c) (x, y, z) ∈
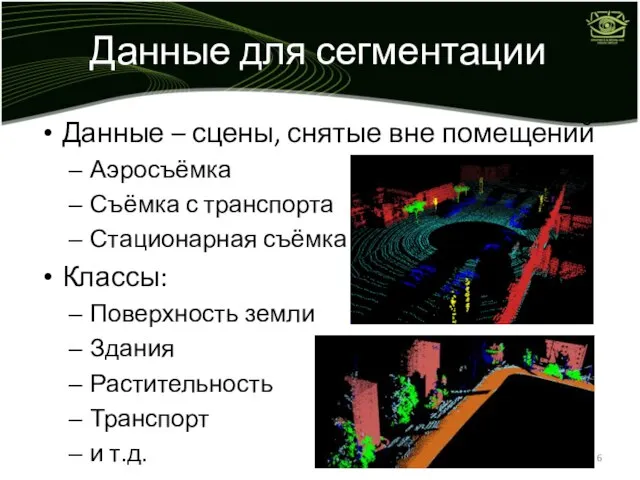
- 6. Данные для сегментации Данные – сцены, снятые вне помещений Аэросъёмка Съёмка с транспорта Стационарная съёмка Классы:
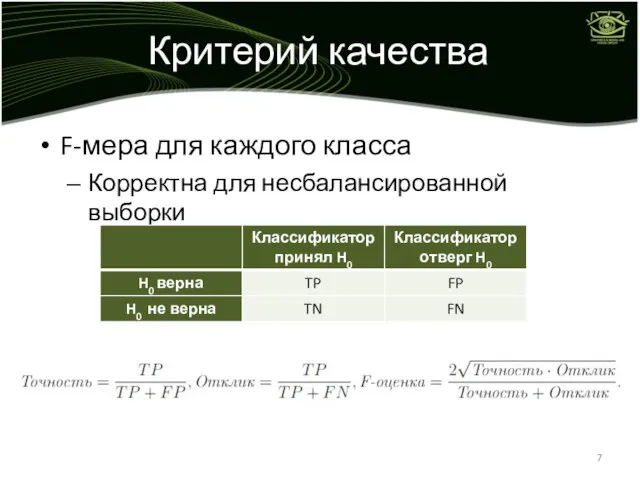
- 7. Критерий качества F-мера для каждого класса Корректна для несбалансированной выборки
- 8. Ассоциативные Марковские сети [Anguelov, 2005] [Munoz, 2008] Минимизируется функция энергии Потенциалы – линейная комбинация признаков: Ассоциативные
- 9. Схема метода Предобработка Построение индекса; пересегментация Назначение потенциалов Унарные потенциалы: рандомизированные деревья Неассоциативные парные потенциалы Классификация
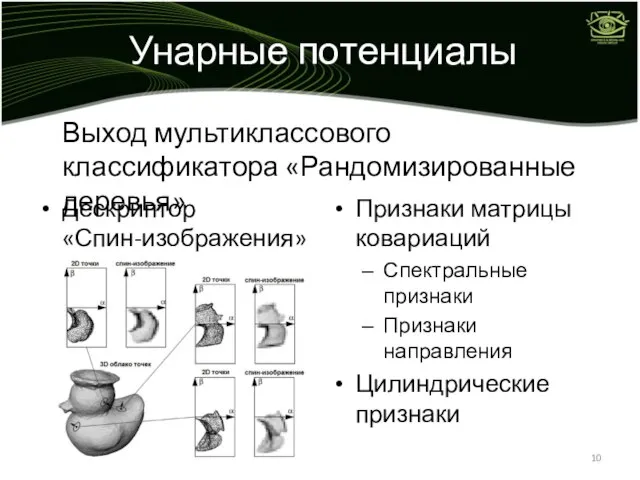
- 10. Унарные потенциалы Дескриптор «Спин-изображения» Признаки матрицы ковариаций Спектральные признаки Признаки направления Цилиндрические признаки Выход мультиклассового классификатора
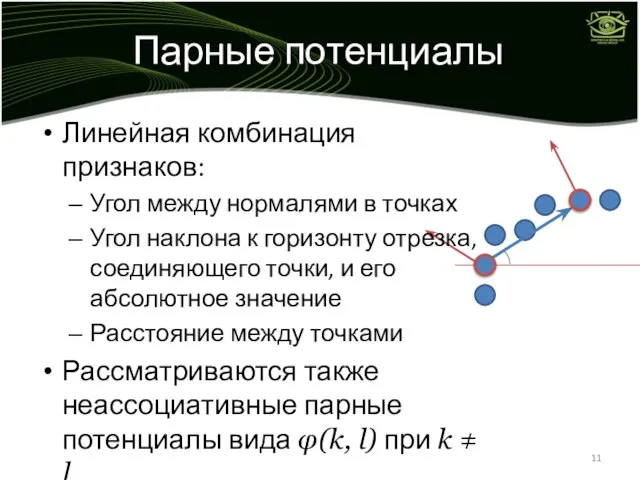
- 11. Парные потенциалы Линейная комбинация признаков: Угол между нормалями в точках Угол наклона к горизонту отрезка, соединяющего
- 12. Научная новизна Пересегментация Ускоряет классификацию на порядки Признаки рёбер (направление, длина) становятся статистически значимыми Неассоциативные парные
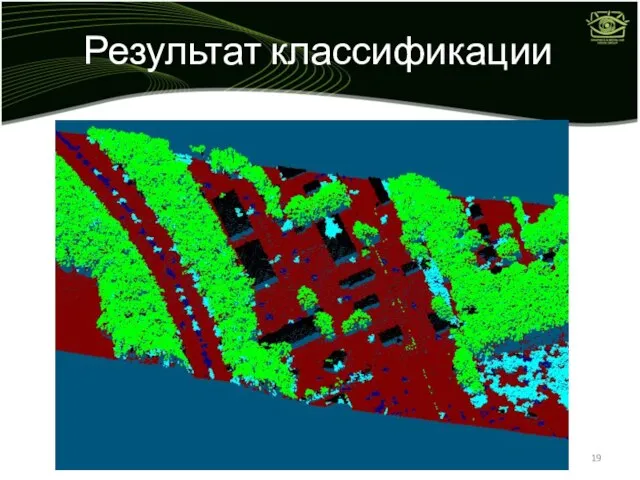
- 13. Пример результата классификации Красный – земля, чёрный – крыша, зелёный – дерево, синий – автомобиль, голубой
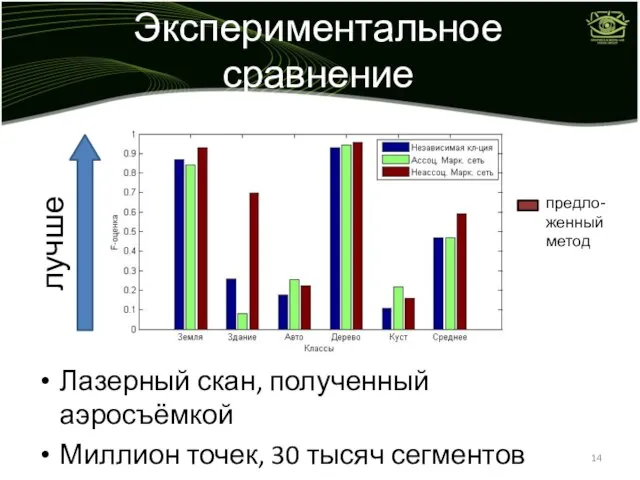
- 14. Экспериментальное сравнение Лазерный скан, полученный аэросъёмкой Миллион точек, 30 тысяч сегментов лучше предло- женный метод
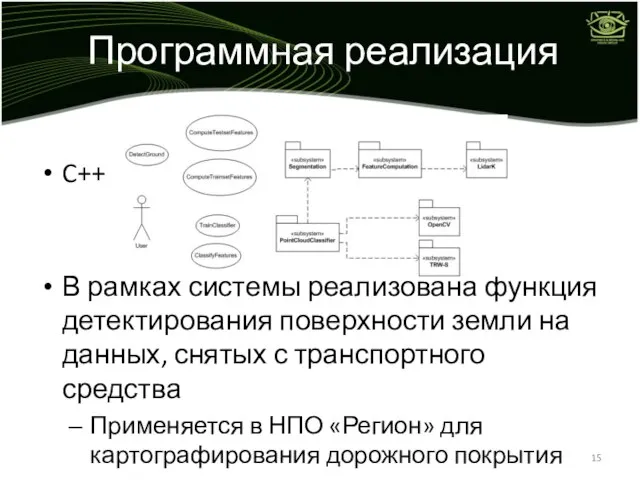
- 15. Программная реализация C++ В рамках системы реализована функция детектирования поверхности земли на данных, снятых с транспортного
- 16. Результаты Проведён обзор методов классификации лазерных сканов Разработан алгоритм классификации лазерных сканов на основе неассоциативных Марковских
- 17. Публикации по теме дипломной работы А. Велижев, Р. Шаповалов, Д. Потапов, Е. Третьяк, А. Конушин, «Автоматическая
- 18. СПАСИБО ЗА ВНИМАНИЕ!
- 19. Результат классификации
- 21. Скачать презентацию
Слайд 2Применение лазерного сканирования
Навигация мобильных роботов
Создание моделей зданий
Картография и паспортизация
Контроль качества продукции
Сохранение культурного
Применение лазерного сканирования
Навигация мобильных роботов
Создание моделей зданий
Картография и паспортизация
Контроль качества продукции
Сохранение культурного

Слайд 3Цели работы
Провести обзор методов классификации лазерных сканов
Разработать алгоритм классификации лазерных сканов на
Цели работы
Провести обзор методов классификации лазерных сканов
Разработать алгоритм классификации лазерных сканов на
Слайд 4Постановка задачи
Вход – набор точек трёхмерного пространства
Выход – метки классов, сопоставленные каждой
Постановка задачи
Вход – набор точек трёхмерного пространства
Выход – метки классов, сопоставленные каждой
Слайд 5Формальная постановка задачи
Стадия обучения:
Вход: множество четвёрок (x, y, z, c)
(x, y,
Формальная постановка задачи
Стадия обучения:
Вход: множество четвёрок (x, y, z, c)
(x, y,
Слайд 6Данные для сегментации
Данные – сцены, снятые вне помещений
Аэросъёмка
Съёмка с транспорта
Стационарная съёмка
Классы:
Поверхность земли
Здания
Растительность
Транспорт
и
Данные для сегментации
Данные – сцены, снятые вне помещений
Аэросъёмка
Съёмка с транспорта
Стационарная съёмка
Классы:
Поверхность земли
Здания
Растительность
Транспорт
и
Слайд 7Критерий качества
F-мера для каждого класса
Корректна для несбалансированной выборки
Критерий качества
F-мера для каждого класса
Корректна для несбалансированной выборки
Слайд 8Ассоциативные Марковские сети
[Anguelov, 2005] [Munoz, 2008]
Минимизируется функция энергии
Потенциалы – линейная комбинация
Ассоциативные Марковские сети
[Anguelov, 2005] [Munoz, 2008]
Минимизируется функция энергии
Потенциалы – линейная комбинация
![Ассоциативные Марковские сети [Anguelov, 2005] [Munoz, 2008] Минимизируется функция энергии Потенциалы –](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/433484/slide-7.jpg)
Слайд 9Схема метода
Предобработка
Построение индекса; пересегментация
Назначение потенциалов
Унарные потенциалы:
рандомизированные деревья
Неассоциативные парные потенциалы
Классификация
Вывод в Марковской
Схема метода
Предобработка
Построение индекса; пересегментация
Назначение потенциалов
Унарные потенциалы:
рандомизированные деревья
Неассоциативные парные потенциалы
Классификация
Вывод в Марковской

Слайд 10Унарные потенциалы
Дескриптор
«Спин-изображения»
Признаки матрицы ковариаций
Спектральные признаки
Признаки направления
Цилиндрические признаки
Выход мультиклассового классификатора «Рандомизированные деревья»
Унарные потенциалы
Дескриптор
«Спин-изображения»
Признаки матрицы ковариаций
Спектральные признаки
Признаки направления
Цилиндрические признаки
Выход мультиклассового классификатора «Рандомизированные деревья»
Слайд 11Парные потенциалы
Линейная комбинация признаков:
Угол между нормалями в точках
Угол наклона к горизонту отрезка,
Парные потенциалы
Линейная комбинация признаков:
Угол между нормалями в точках
Угол наклона к горизонту отрезка,
Слайд 12Научная новизна
Пересегментация
Ускоряет классификацию на порядки
Признаки рёбер (направление, длина) становятся статистически значимыми
Неассоциативные парные
Научная новизна
Пересегментация
Ускоряет классификацию на порядки
Признаки рёбер (направление, длина) становятся статистически значимыми
Неассоциативные парные
Слайд 13Пример результата классификации
Красный – земля, чёрный – крыша,
зелёный – дерево, синий
Пример результата классификации
Красный – земля, чёрный – крыша, зелёный – дерево, синий

Слайд 14Экспериментальное сравнение
Лазерный скан, полученный аэросъёмкой
Миллион точек, 30 тысяч сегментов
лучше
предло-
женный
метод
Экспериментальное сравнение
Лазерный скан, полученный аэросъёмкой
Миллион точек, 30 тысяч сегментов
лучше
предло-
женный
метод
Слайд 15Программная реализация
C++
В рамках системы реализована функция детектирования поверхности земли на данных, снятых
Программная реализация
C++
В рамках системы реализована функция детектирования поверхности земли на данных, снятых
Слайд 16Результаты
Проведён обзор методов классификации лазерных сканов
Разработан алгоритм классификации лазерных сканов на основе
Результаты
Проведён обзор методов классификации лазерных сканов
Разработан алгоритм классификации лазерных сканов на основе
Слайд 17Публикации по теме
дипломной работы
А. Велижев, Р. Шаповалов, Д. Потапов, Е. Третьяк,
Публикации по теме
дипломной работы
А. Велижев, Р. Шаповалов, Д. Потапов, Е. Третьяк,
Слайд 18СПАСИБО ЗА ВНИМАНИЕ!
СПАСИБО ЗА ВНИМАНИЕ!
Слайд 19Результат классификации
Результат классификации
 Кемеровская Региональная Общественная Организация
Кемеровская Региональная Общественная Организация Ароматы для средств по уходу за волосами
Ароматы для средств по уходу за волосами Вебинар для Руководителей Центров Avon
Вебинар для Руководителей Центров Avon Сон наяву или приключения в стране чудес
Сон наяву или приключения в стране чудес Цифровое телевидение
Цифровое телевидение Levels Up Club— это: Прогнозирование финансовых рынков, разработка алгоритмов торговых роботов
Levels Up Club— это: Прогнозирование финансовых рынков, разработка алгоритмов торговых роботов Черты сходства человека и человекообразных обезьян
Черты сходства человека и человекообразных обезьян Повышение профессиональной компетентности педагогов по вопросам развития речи дошкольников
Повышение профессиональной компетентности педагогов по вопросам развития речи дошкольников Презентация классного коллектива
Презентация классного коллектива Феномен Лапенко
Феномен Лапенко Энергосберегающие технологии транспорта газа
Энергосберегающие технологии транспорта газа Приказ Министерства образования и науки РФ № 209 от 24 марта 2010 г.
Приказ Министерства образования и науки РФ № 209 от 24 марта 2010 г. Формы взаимодействия адвоката и следователя на предварительном следствии. Содействие и противодействие
Формы взаимодействия адвоката и следователя на предварительном следствии. Содействие и противодействие Поклонюсь Тебя, я, о Боже Нету в целом мире дороже Воспою Тебе хвалу Бог мой я тебя ищу
Поклонюсь Тебя, я, о Боже Нету в целом мире дороже Воспою Тебе хвалу Бог мой я тебя ищу РОДИТЕЛЯМ О ПРАВИЛАХ ДОРОЖНОГО ДВИЖЕНИЯ.. Причиной дорожно- транспортных происшествий чаще всего являются сами дети. Приводит к эт
РОДИТЕЛЯМ О ПРАВИЛАХ ДОРОЖНОГО ДВИЖЕНИЯ.. Причиной дорожно- транспортных происшествий чаще всего являются сами дети. Приводит к эт Конкурс чтецов 1-4 классов в Выльгортской Школе №1
Конкурс чтецов 1-4 классов в Выльгортской Школе №1 Дроби
Дроби Презентация по английскому Areas of London Районы Лондона
Презентация по английскому Areas of London Районы Лондона Забастовка. Право на забастовку
Забастовка. Право на забастовку ТИПЫ КОСТРОВ
ТИПЫ КОСТРОВ Продление срока срока службы эпоксидных композитов
Продление срока срока службы эпоксидных композитов Юлианский Календарь.
Юлианский Календарь. Baroko aktualumas šiais laikais
Baroko aktualumas šiais laikais Презентация на тему Противоположные числа (6 класс)
Презентация на тему Противоположные числа (6 класс) Завтрак чемпиона
Завтрак чемпиона Филиппо Брунеллески
Филиппо Брунеллески Презентация1
Презентация1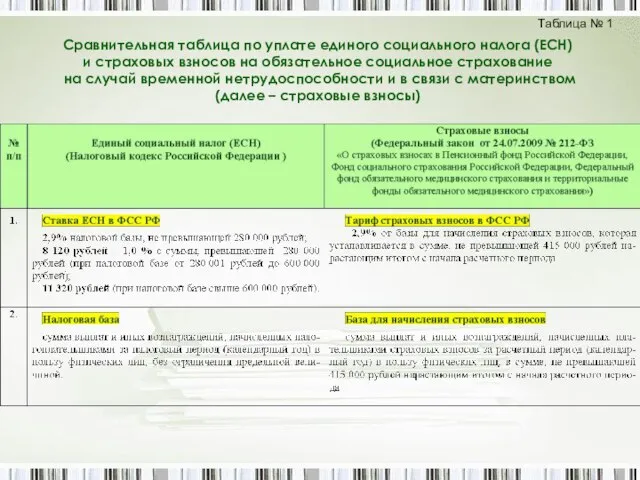 Сравнительная таблица по уплате единого социального налога (ЕСН) и страховых взносов на обязательное социальное страхование на с
Сравнительная таблица по уплате единого социального налога (ЕСН) и страховых взносов на обязательное социальное страхование на с