- Автоматическое зависимое наблюдение АЗН (ADS)

Содержание
- 2. Сокращения ADS-B и ADS-C расшифровываются: Automatic - работает автоматически и не требует вмешательства оператора. Dependent -
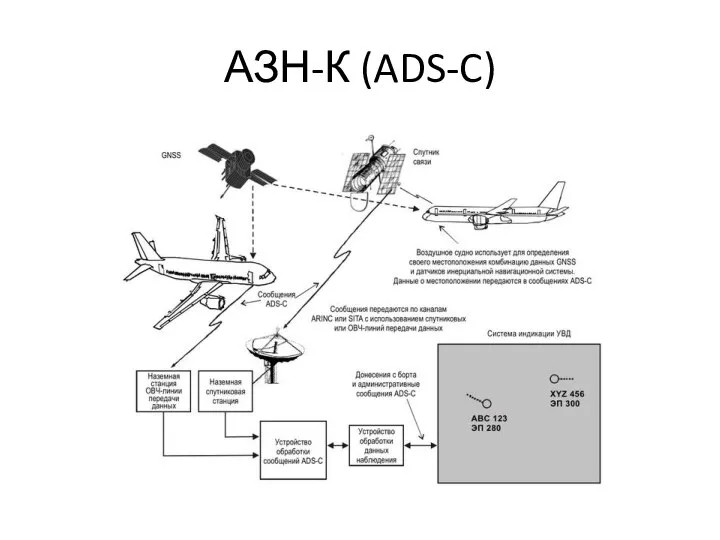
- 3. АЗН-К (ADS-C)
- 4. Информация, передаваемая в сообщениях ADS‐C: a) нынешнее местоположение (широта, долгота и абсолютная высота) плюс временнaя отметка
- 5. Применение АЗН-К ADS‐C обычно используется в океанических и удаленных районах, где отсутствуют радиолокаторы. Поэтому система ориентирована
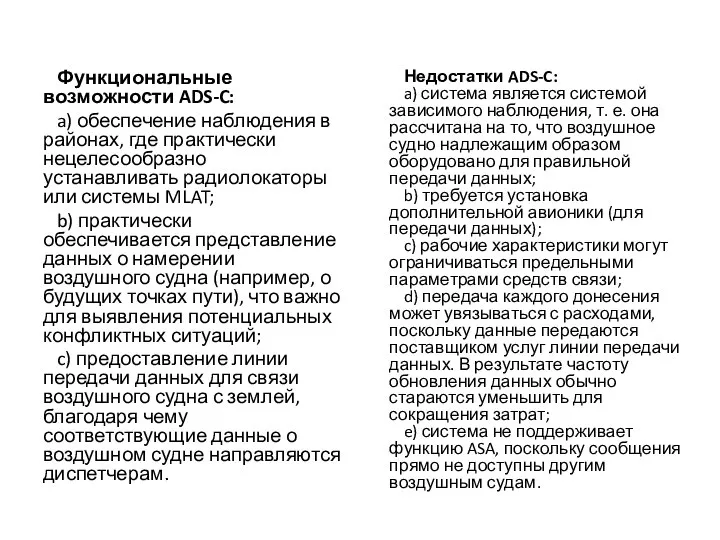
- 6. Функциональные возможности ADS‐C: a) обеспечение наблюдения в районах, где практически нецелесообразно устанавливать радиолокаторы или системы MLAT;
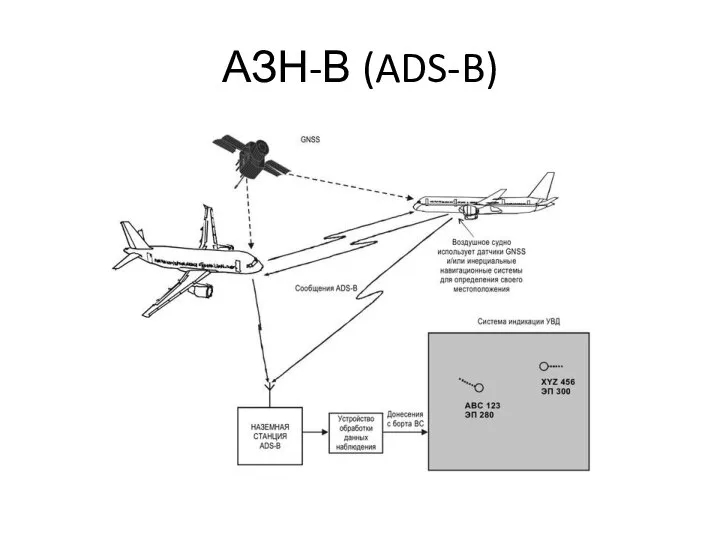
- 7. АЗН-В (ADS-B)
- 8. АЗН-В - это технология, внедряемая в настоящее время по всему миру и позволяющая пилотам в кабине
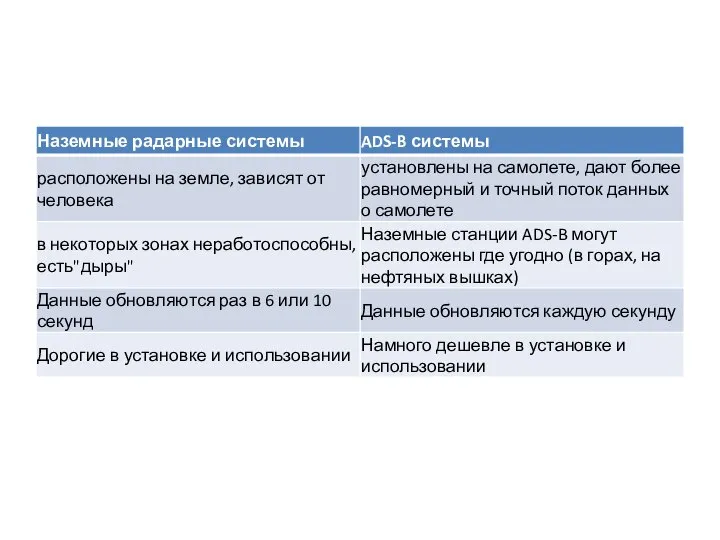
- 9. Преимущества ADS-B Низкая стоимость, высокая точность и большая скорость обновления данных. Система ADS-B состоит из сети
- 11. Услуги наблюдения и трансляции Наблюдение АЗН TIS Связь FIS CPDLC (контрактное приложение) Навигация DGNSS
- 12. TIS-B. Traffic Information Service—Broadcast. Этот сервис состоит в том, что наземные радарные системы отслеживают все объекты
- 13. FIS-B. Flight Information Service—Broadcast. Этот сервис состоит в том, что наземные станции передают информацию о погоде
- 14. CPDLC (Controller–pilot data link communications)- связь между диспетчером и экипажем ВС по цифровой линии, управляемая пилотом;
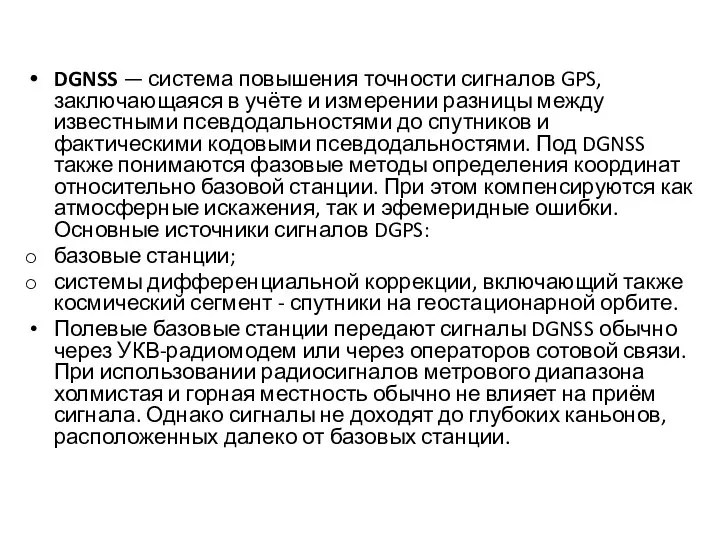
- 15. DGNSS — система повышения точности сигналов GPS, заключающаяся в учёте и измерении разницы между известными псевдодальностями
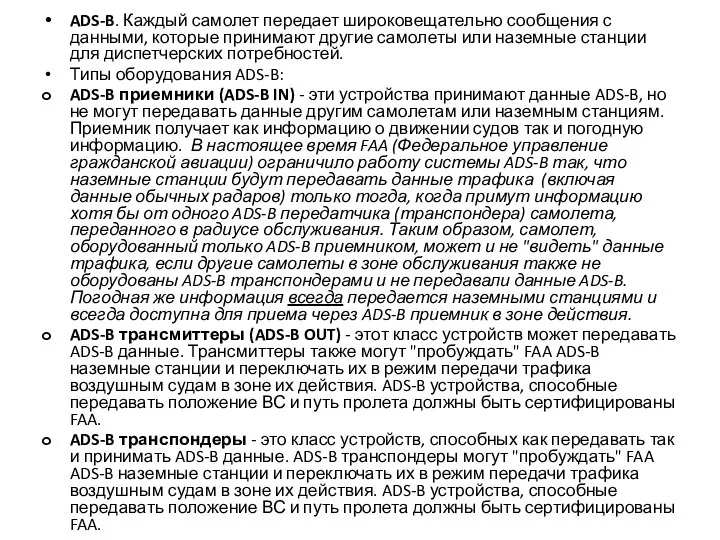
- 16. ADS-B. Каждый самолет передает широковещательно сообщения с данными, которые принимают другие самолеты или наземные станции для
- 18. Моноимпульсный вторичный радиолокатор «Аврора», 4-Х канальная станция АЗН-В 1090 ES «НС-1»
- 19. Двухстандартный МВРЛ режима S с функцией расширенного наблюдения в режиме АЗН-В 1090 «Аврора» - первый в
- 21. Многопозиционная система наблюдения МПСН (MLT)
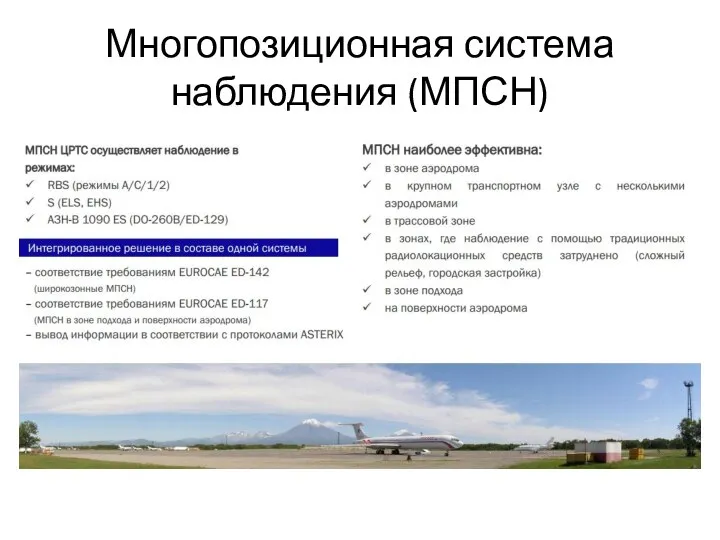
- 22. Многопозиционная система наблюдения (МПСН)
- 23. Преимущества МПСН естественная возможность измерения третьей координаты; меньшая на 40-50% стоимость эквивалентной по зоне действия моностатической
- 24. Структурная схема и принцип действия МПСН
- 25. Типовой состав МПСН – приемные станции (≥4) принимают, декодируют сигналы от бортовых ответчиков – передающие станции
- 27. Скачать презентацию
Слайд 2Сокращения ADS-B и ADS-C расшифровываются:
Automatic - работает автоматически и не требует вмешательства
Сокращения ADS-B и ADS-C расшифровываются:
Automatic - работает автоматически и не требует вмешательства
Слайд 3АЗН-К (ADS-C)
АЗН-К (ADS-C)
Слайд 4Информация, передаваемая в сообщениях ADS‐C:
a) нынешнее местоположение (широта, долгота и абсолютная высота)
Информация, передаваемая в сообщениях ADS‐C:
a) нынешнее местоположение (широта, долгота и абсолютная высота)
Слайд 5Применение АЗН-К
ADS‐C обычно используется в океанических и удаленных районах, где отсутствуют радиолокаторы.
Применение АЗН-К
ADS‐C обычно используется в океанических и удаленных районах, где отсутствуют радиолокаторы.
Слайд 6Функциональные возможности ADS‐C:
a) обеспечение наблюдения в районах, где практически нецелесообразно устанавливать радиолокаторы
Функциональные возможности ADS‐C:
a) обеспечение наблюдения в районах, где практически нецелесообразно устанавливать радиолокаторы
Слайд 7АЗН-В (ADS-B)
АЗН-В (ADS-B)
Слайд 8АЗН-В -
это технология, внедряемая в настоящее время по всему миру и
АЗН-В -
это технология, внедряемая в настоящее время по всему миру и
Слайд 9Преимущества ADS-B
Низкая стоимость, высокая точность и большая скорость обновления данных.
Система ADS-B состоит
Преимущества ADS-B
Низкая стоимость, высокая точность и большая скорость обновления данных.
Система ADS-B состоит
Слайд 11Услуги наблюдения и трансляции
Наблюдение
АЗН
TIS
Связь
FIS
CPDLC (контрактное приложение)
Навигация
DGNSS
Услуги наблюдения и трансляции
Наблюдение
АЗН
TIS
Связь
FIS
CPDLC (контрактное приложение)
Навигация
DGNSS

Слайд 12TIS-B. Traffic Information Service—Broadcast. Этот сервис состоит в том, что наземные радарные
TIS-B. Traffic Information Service—Broadcast. Этот сервис состоит в том, что наземные радарные
Слайд 13FIS-B. Flight Information Service—Broadcast. Этот сервис состоит в том, что наземные станции
FIS-B. Flight Information Service—Broadcast. Этот сервис состоит в том, что наземные станции
Слайд 14CPDLC (Controller–pilot data link communications)- связь между диспетчером и экипажем ВС по
CPDLC (Controller–pilot data link communications)- связь между диспетчером и экипажем ВС по
Слайд 15DGNSS — система повышения точности сигналов GPS, заключающаяся в учёте и измерении
DGNSS — система повышения точности сигналов GPS, заключающаяся в учёте и измерении
Слайд 16ADS-B. Каждый самолет передает широковещательно сообщения с данными, которые принимают другие самолеты
ADS-B. Каждый самолет передает широковещательно сообщения с данными, которые принимают другие самолеты

Слайд 18Моноимпульсный вторичный радиолокатор «Аврора», 4-Х канальная станция АЗН-В 1090 ES «НС-1»
Моноимпульсный вторичный радиолокатор «Аврора», 4-Х канальная станция АЗН-В 1090 ES «НС-1»

Слайд 19Двухстандартный МВРЛ режима S с функцией расширенного наблюдения в режиме АЗН-В 1090
Двухстандартный МВРЛ режима S с функцией расширенного наблюдения в режиме АЗН-В 1090
Слайд 21Многопозиционная система наблюдения МПСН (MLT)
Многопозиционная система наблюдения МПСН (MLT)
Слайд 22Многопозиционная система наблюдения (МПСН)
Многопозиционная система наблюдения (МПСН)
Слайд 23Преимущества МПСН
естественная возможность измерения третьей координаты;
меньшая на 40-50% стоимость эквивалентной по зоне
Преимущества МПСН
естественная возможность измерения третьей координаты;
меньшая на 40-50% стоимость эквивалентной по зоне
Слайд 24Структурная схема и принцип действия МПСН
Структурная схема и принцип действия МПСН

Слайд 25Типовой состав МПСН
– приемные станции (≥4)
принимают, декодируют сигналы от бортовых ответчиков
– передающие
Типовой состав МПСН
– приемные станции (≥4)
принимают, декодируют сигналы от бортовых ответчиков
– передающие
 Древо семьи. Декоративно-прикладное творчество
Древо семьи. Декоративно-прикладное творчество Тема творчества в поэзии Анны Ахматовой
Тема творчества в поэзии Анны Ахматовой Бакст Лев Самойлович
Бакст Лев Самойлович Сечение
Сечение Розничное кредитованиеЖилищные кредитыставки введены в действие с 15 октября 2010 года
Розничное кредитованиеЖилищные кредитыставки введены в действие с 15 октября 2010 года Александр Матросов
Александр Матросов Развитие и саморазвитие мастерства педагога как основа успешного внедрения инноваций
Развитие и саморазвитие мастерства педагога как основа успешного внедрения инноваций Объект: Нижний Новгород, ул Фучика 8-2
Объект: Нижний Новгород, ул Фучика 8-2 Сравнение чисел. Числовые неравенства
Сравнение чисел. Числовые неравенства Деление У-2
Деление У-2 Учет и анализ заемных средств в ООО ТЗК Автодеталь
Учет и анализ заемных средств в ООО ТЗК Автодеталь Долгих Станислав
Долгих Станислав Метрическая система длин
Метрическая система длин Рецензия на картину Рафаэдя Санти "Сикстинская Мадонна"
Рецензия на картину Рафаэдя Санти "Сикстинская Мадонна" Дневник здоровья
Дневник здоровья Презентация на тему Турецкая республика
Презентация на тему Турецкая республика  ИконографияИскусство написания икон( икона = образграфо = пишу)
ИконографияИскусство написания икон( икона = образграфо = пишу) Мастер-класс Роза из холодного фарфора
Мастер-класс Роза из холодного фарфора НОВОЕ ЗАКОНОДАТЕЛЬСТВО О ТЕХНИЧЕСКОМ РЕГУЛИРОВАНИИ
НОВОЕ ЗАКОНОДАТЕЛЬСТВО О ТЕХНИЧЕСКОМ РЕГУЛИРОВАНИИ Как наладить свадебный сервис в регионе
Как наладить свадебный сервис в регионе Консультанты, работающие с людьми с СДВГ
Консультанты, работающие с людьми с СДВГ Живая живопись
Живая живопись Презентация на тему Измерительные приборы
Презентация на тему Измерительные приборы  Русская природа в музыке и поэзии
Русская природа в музыке и поэзии Технические проблемы магазина
Технические проблемы магазина Повторение изученного по фонетике
Повторение изученного по фонетике Меры поддержки МСБ
Меры поддержки МСБ Лабораторная работа №1
Лабораторная работа №1