- Автоматизированные системы управления технологическим процессом

Содержание
- 2. ПЛАН ЛЕКЦИИ Введение. Терминология, применяемая при разработке систем автоматизированного управления технологическими процессами и оборудованием. Структурная схема
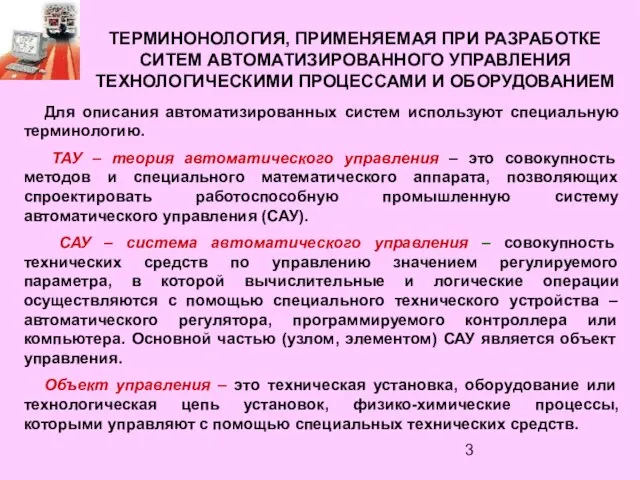
- 3. ТЕРМИНОНОЛОГИЯ, ПРИМЕНЯЕМАЯ ПРИ РАЗРАБОТКЕ СИТЕМ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И ОБОРУДОВАНИЕМ Для описания автоматизированных систем используют
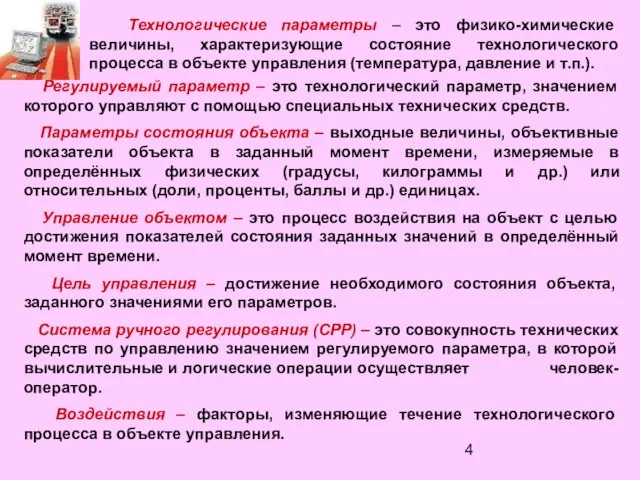
- 4. Технологические параметры – это физико-химические величины, характеризующие состояние технологического процесса в объекте управления (температура, давление и
- 5. Управляющие воздействия – это воздействия на объект управления, организуемые техническим устройством или человеком-оператором с целью компенсации
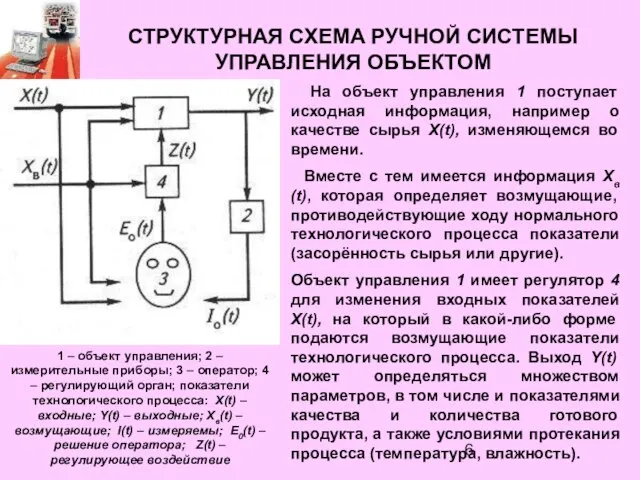
- 6. СТРУКТУРНАЯ СХЕМА РУЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ 1 – объект управления; 2 – измерительные приборы; 3 –
- 7. Показатели процесса Y(t) контролируют прибором 2 (в лаборатории или с использованием экономического анализа). В результате человек-оператор
- 8. СТРУКТУРНАЯ СХЕМА САУ САУ состоит из отдельных узлов-элементов, соединённых друг с другом определённым образом. Структурные схемы
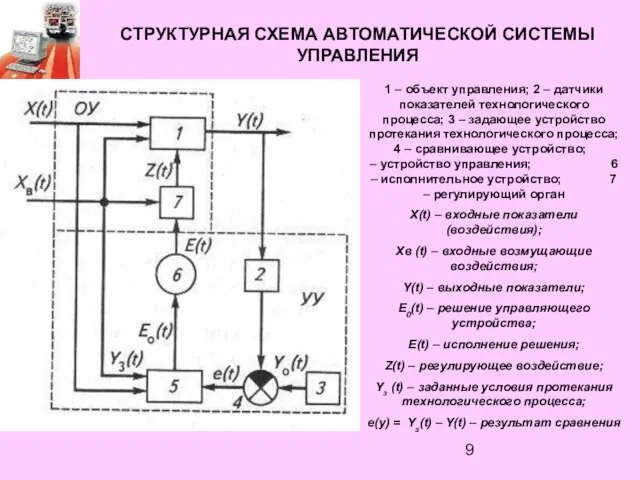
- 9. СТРУКТУРНАЯ СХЕМА АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ 1 – объект управления; 2 – датчики показателей технологического процесса; 3
- 10. Работает система следующим образом. В задающем устройстве 3 заданы необходимые параметры протекания технологического процесса – температура,
- 11. СОВРЕМЕННЫЕ САУ Современные САУ включают в свой состав компьютер для переработки информации, поступающей от ОУ (объекта
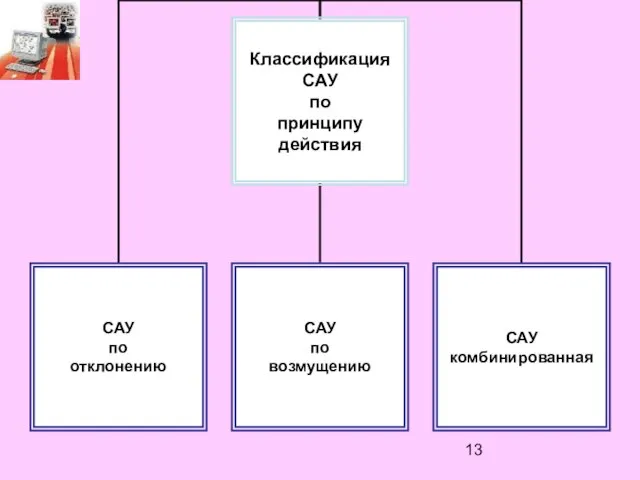
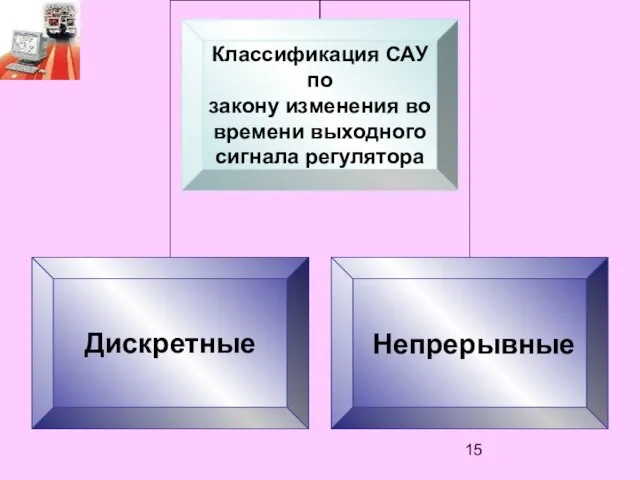
- 12. КЛАССИФИКАЦИЯ САУ
- 18. ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ САУ В САУ, работающей по отклонению, регулятор изменяет управляющий сигнал после того, как
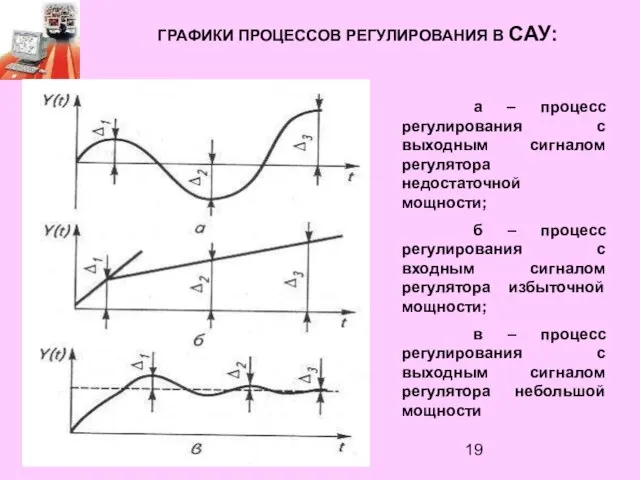
- 19. ГРАФИКИ ПРОЦЕССОВ РЕГУЛИРОВАНИЯ В САУ: а – процесс регулирования с выходным сигналом регулятора недостаточной мощности; б
- 20. 2. Регулятор вырабатывает управляющий сигнал избыточной мощности, который не только компенсирует возмущающее воздействие и сводит к
- 21. Статическая ошибка – это разность величин регулируемого параметра в исходном и конечном (после окончания регулирования) состояниях
- 23. Скачать презентацию
Слайд 2ПЛАН ЛЕКЦИИ
Введение.
Терминология, применяемая при разработке систем автоматизированного управления технологическими процессами и оборудованием.
Структурная
ПЛАН ЛЕКЦИИ
Введение.
Терминология, применяемая при разработке систем автоматизированного управления технологическими процессами и оборудованием.
Структурная

Слайд 3ТЕРМИНОНОЛОГИЯ, ПРИМЕНЯЕМАЯ ПРИ РАЗРАБОТКЕ СИТЕМ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И ОБОРУДОВАНИЕМ
Для
ТЕРМИНОНОЛОГИЯ, ПРИМЕНЯЕМАЯ ПРИ РАЗРАБОТКЕ СИТЕМ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И ОБОРУДОВАНИЕМ
Для
Слайд 4 Технологические параметры – это физико-химические величины, характеризующие состояние технологического процесса в
Технологические параметры – это физико-химические величины, характеризующие состояние технологического процесса в
Слайд 5 Управляющие воздействия – это воздействия на объект управления, организуемые техническим устройством
Управляющие воздействия – это воздействия на объект управления, организуемые техническим устройством

Слайд 6СТРУКТУРНАЯ СХЕМА РУЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ
1 – объект управления; 2 – измерительные
СТРУКТУРНАЯ СХЕМА РУЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ
1 – объект управления; 2 – измерительные
Слайд 7 Показатели процесса Y(t) контролируют прибором 2 (в лаборатории или с использованием
Показатели процесса Y(t) контролируют прибором 2 (в лаборатории или с использованием
Слайд 8СТРУКТУРНАЯ СХЕМА САУ
САУ состоит из отдельных узлов-элементов, соединённых друг с другом
СТРУКТУРНАЯ СХЕМА САУ
САУ состоит из отдельных узлов-элементов, соединённых друг с другом
Слайд 9СТРУКТУРНАЯ СХЕМА АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ
1 – объект управления; 2 – датчики показателей
СТРУКТУРНАЯ СХЕМА АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ
1 – объект управления; 2 – датчики показателей
Слайд 10Работает система следующим образом. В задающем устройстве 3 заданы необходимые параметры протекания
Работает система следующим образом. В задающем устройстве 3 заданы необходимые параметры протекания
Слайд 11СОВРЕМЕННЫЕ САУ
Современные САУ включают в свой состав компьютер для переработки информации,
СОВРЕМЕННЫЕ САУ
Современные САУ включают в свой состав компьютер для переработки информации,
Слайд 12КЛАССИФИКАЦИЯ САУ
КЛАССИФИКАЦИЯ САУ




Слайд 18ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ САУ
В САУ, работающей по отклонению, регулятор изменяет управляющий
ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ САУ
В САУ, работающей по отклонению, регулятор изменяет управляющий
Слайд 19ГРАФИКИ ПРОЦЕССОВ РЕГУЛИРОВАНИЯ В САУ:
а – процесс регулирования с выходным сигналом
ГРАФИКИ ПРОЦЕССОВ РЕГУЛИРОВАНИЯ В САУ:
а – процесс регулирования с выходным сигналом
Слайд 20 2. Регулятор вырабатывает управляющий сигнал избыточной мощности, который не только компенсирует
2. Регулятор вырабатывает управляющий сигнал избыточной мощности, который не только компенсирует
Слайд 21 Статическая ошибка – это разность величин регулируемого параметра в исходном и
Статическая ошибка – это разность величин регулируемого параметра в исходном и
 Обновление модельного ряда стиральных машин ASKO
Обновление модельного ряда стиральных машин ASKO Види маркетингових досліджень
Види маркетингових досліджень Иллюстративные жесты и структура дискурса
Иллюстративные жесты и структура дискурса МОУ Новохованская СОШ Воспитательная система 8 класса
МОУ Новохованская СОШ Воспитательная система 8 класса Теория государства и права как наука и учебная дисциплина
Теория государства и права как наука и учебная дисциплина Презентация на тему Синтаксические связи слов в словосочетаниях 8 класс
Презентация на тему Синтаксические связи слов в словосочетаниях 8 класс  Презентация Коваленко 007
Презентация Коваленко 007 Пасха в Испании
Пасха в Испании Приготовление ржано-пшеничного теста с применением пряностей и различных наполнителей
Приготовление ржано-пшеничного теста с применением пряностей и различных наполнителей МОЛНИЯ-СВО УКРАИНА. 28.09.2022
МОЛНИЯ-СВО УКРАИНА. 28.09.2022 The Pearl of Siberia
The Pearl of Siberia Математическая викторина
Математическая викторина  Метафоры эмоций человека в китайском и русском языке (на материале романа «Евгений Онегин»)
Метафоры эмоций человека в китайском и русском языке (на материале романа «Евгений Онегин») Как написать сжатое изложение
Как написать сжатое изложение Вот она, наша славянская душа!
Вот она, наша славянская душа! Применение Анализа регуляторного воздействия. Кейс по законопроекту «О государственном регулировании производства и оборота эт
Применение Анализа регуляторного воздействия. Кейс по законопроекту «О государственном регулировании производства и оборота эт Квилллинг
Квилллинг Информационное превосходство
Информационное превосходство  Semeyno-brachnye_otnoshenia_Zinovyeva_9G (1)
Semeyno-brachnye_otnoshenia_Zinovyeva_9G (1) Как Хрюша трубку курил
Как Хрюша трубку курил Общественный строй Древней Руси
Общественный строй Древней Руси «Деньги не пахнут» Веспасиан Тит Флавий
«Деньги не пахнут» Веспасиан Тит Флавий ШМП 2017 Генерация бизнес идей
ШМП 2017 Генерация бизнес идей Ядовитые грибы
Ядовитые грибы 6,5 блок Наши офисы. Шаблон
6,5 блок Наши офисы. Шаблон Христианский общественный благотворительный фонд «Старый Свет»
Христианский общественный благотворительный фонд «Старый Свет» Методы и формы гражданского образования
Методы и формы гражданского образования Нестандартное BTL-продвижение «3G Коннект» МТС.
Нестандартное BTL-продвижение «3G Коннект» МТС.