Белорусский государственный университет Факультет прикладной математики и информатики Кафедра методов оптимального управления
- Белорусский государственный университет Факультет прикладной математики и информатики Кафедра методов оптимального управления

Содержание
- 2. Поставленные цели и задачи Изучить структуру опоры для задачи в классе ИУВ-1 Построить опору для задачи
- 3. Поставленные цели и задачи Реализовать моделирование режима реального времени Провести сравнительный анализ программного и позиционного управления
- 4. Объект исследования. Методы исследования. Область применения Объект исследования – задачи в классах инерционных управляющих воздействий Методы
- 5. Актуальность Возможность построения реализации оптимальной обратной связи позволит управлять системой в режиме реального времени, корректировать это
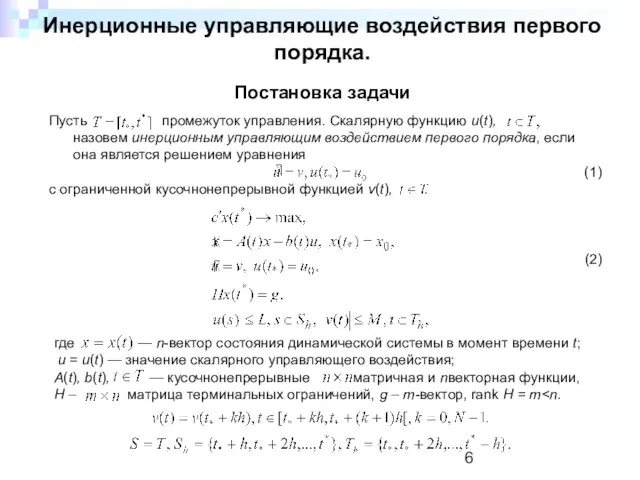
- 6. Инерционные управляющие воздействия первого порядка. Постановка задачи Пусть промежуток управления. Скалярную функцию u(t), назовем инерционным
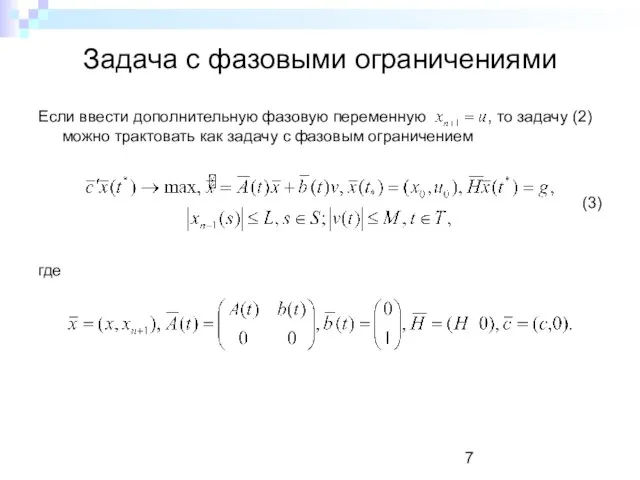
- 7. Задача с фазовыми ограничениями Если ввести дополнительную фазовую переменную , то задачу (2) можно трактовать как
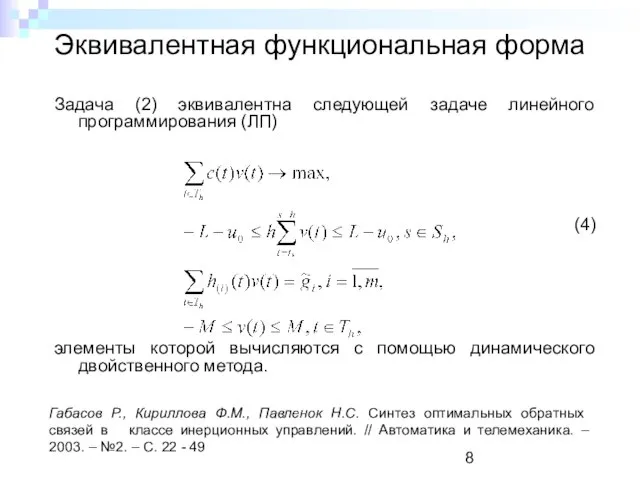
- 8. Эквивалентная функциональная форма Задача (2) эквивалентна следующей задаче линейного программирования (ЛП) (4) элементы которой вычисляются с
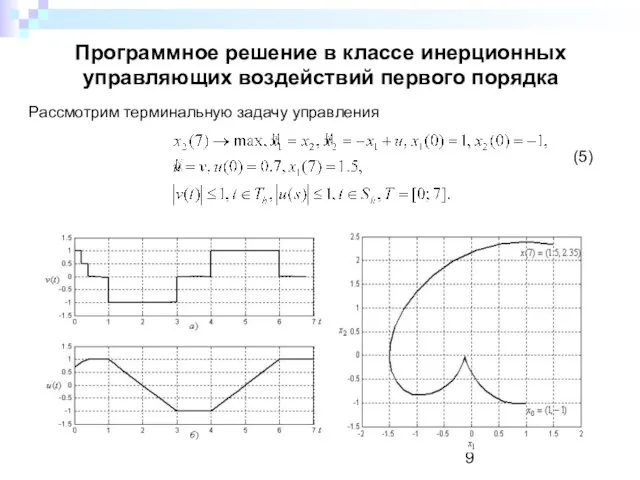
- 9. Программное решение в классе инерционных управляющих воздействий первого порядка Рассмотрим терминальную задачу управления (5)
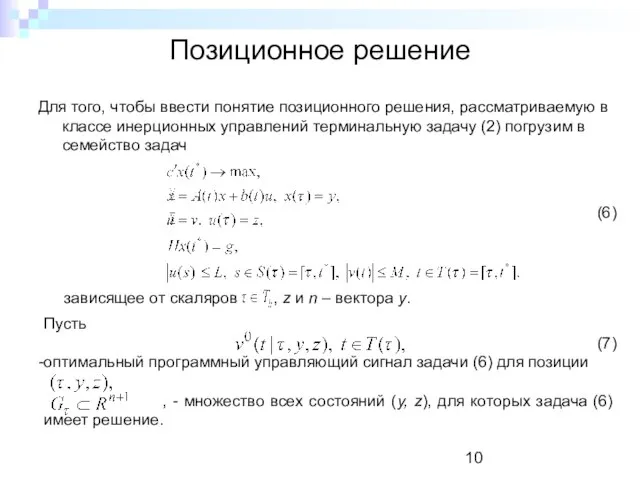
- 10. Позиционное решение Для того, чтобы ввести понятие позиционного решения, рассматриваемую в классе инерционных управлений терминальную задачу
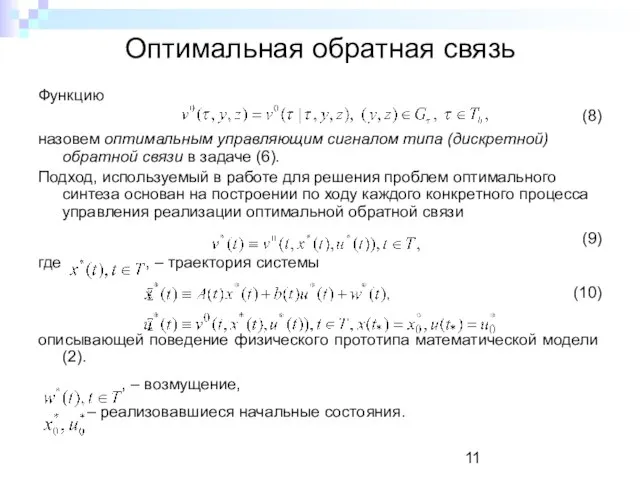
- 11. Оптимальная обратная связь Функцию (8) назовем оптимальным управляющим сигналом типа (дискретной) обратной связи в задаче (6).
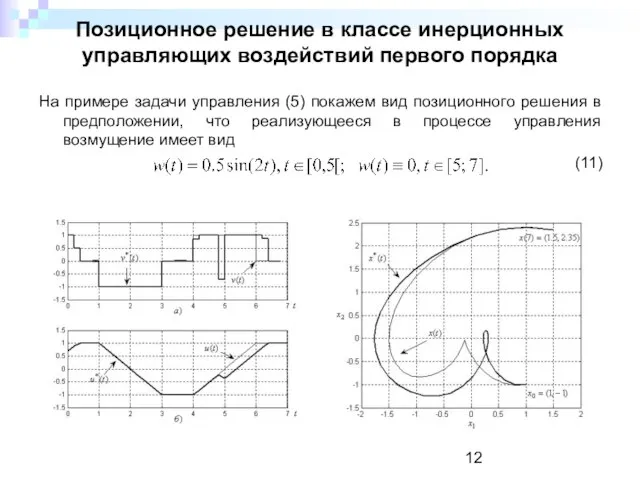
- 12. Позиционное решение в классе инерционных управляющих воздействий первого порядка На примере задачи управления (5) покажем вид
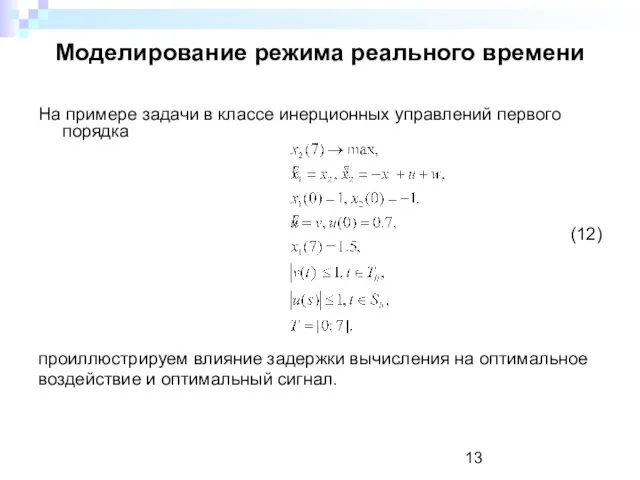
- 13. Моделирование режима реального времени На примере задачи в классе инерционных управлений первого порядка (12) проиллюстрируем влияние
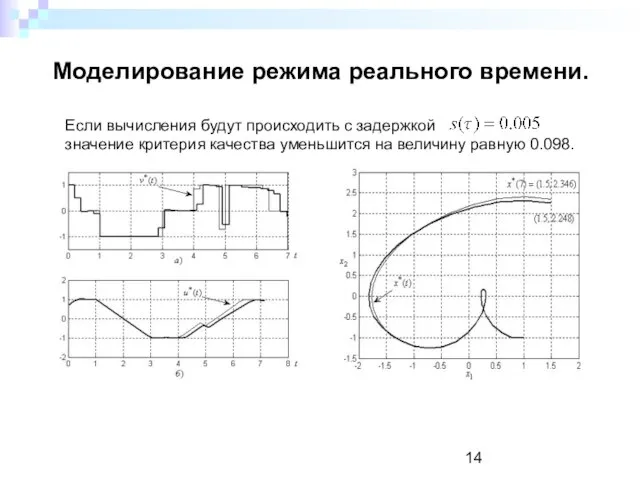
- 14. Моделирование режима реального времени. Если вычисления будут происходить с задержкой значение критерия качества уменьшится на величину
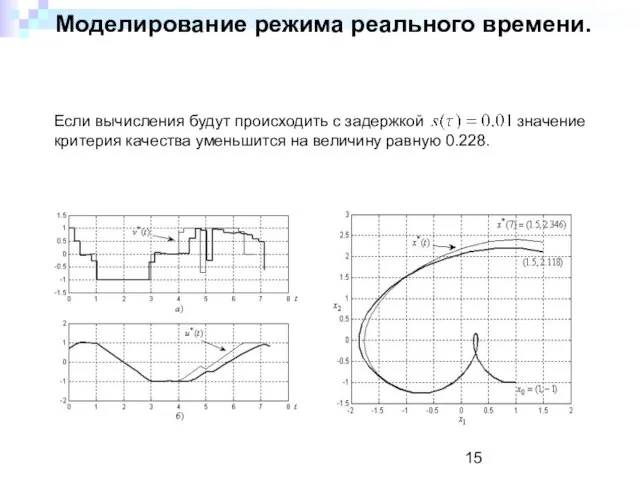
- 15. Моделирование режима реального времени. Если вычисления будут происходить с задержкой значение критерия качества уменьшится на величину
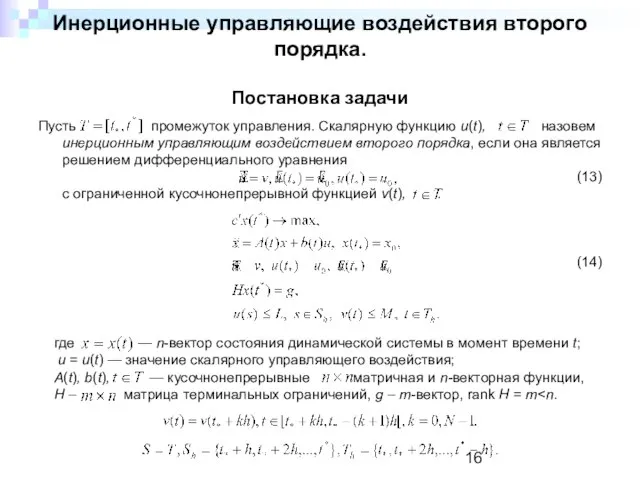
- 16. Инерционные управляющие воздействия второго порядка. Постановка задачи Пусть промежуток управления. Скалярную функцию u(t), назовем инерционным
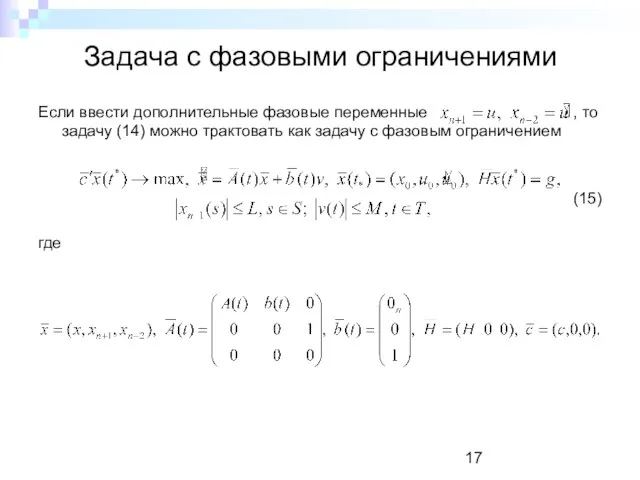
- 17. Задача с фазовыми ограничениями Если ввести дополнительные фазовые переменные , то задачу (14) можно трактовать как
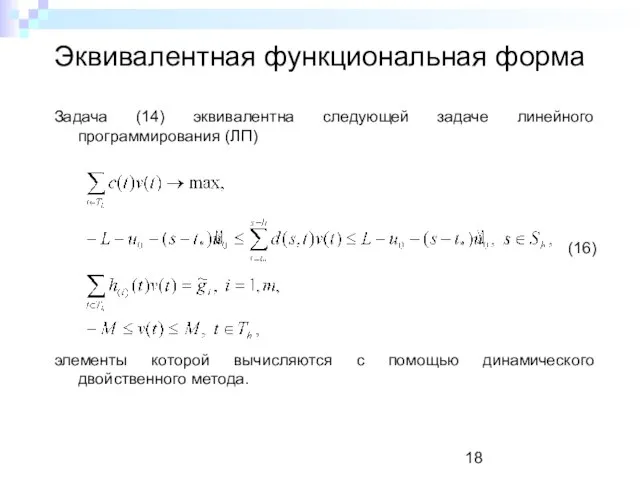
- 18. Эквивалентная функциональная форма Задача (14) эквивалентна следующей задаче линейного программирования (ЛП) (16) элементы которой вычисляются с
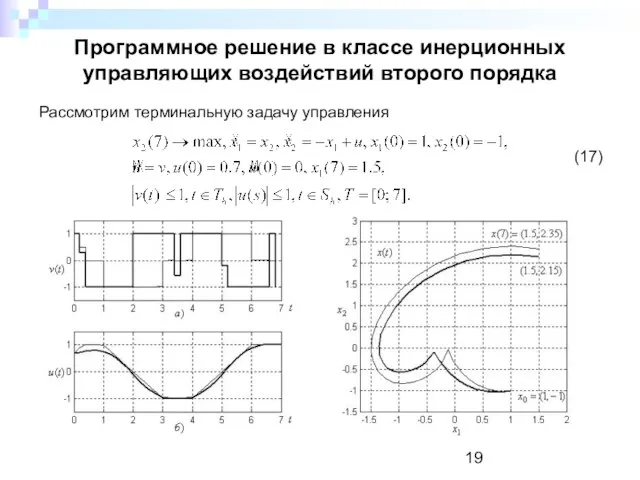
- 19. Программное решение в классе инерционных управляющих воздействий второго порядка Рассмотрим терминальную задачу управления (17)
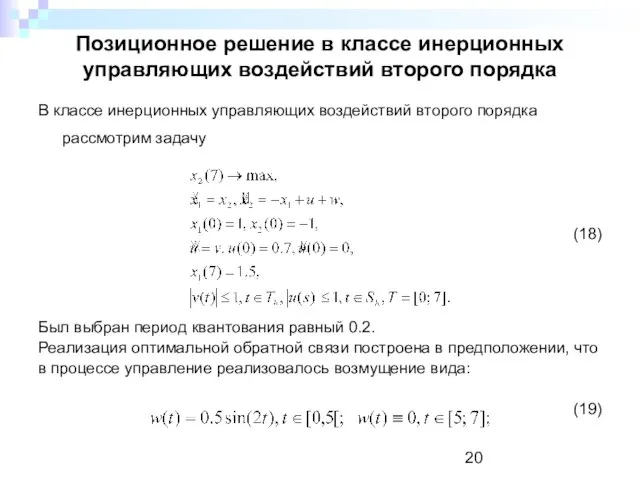
- 20. Позиционное решение в классе инерционных управляющих воздействий второго порядка В классе инерционных управляющих воздействий второго порядка
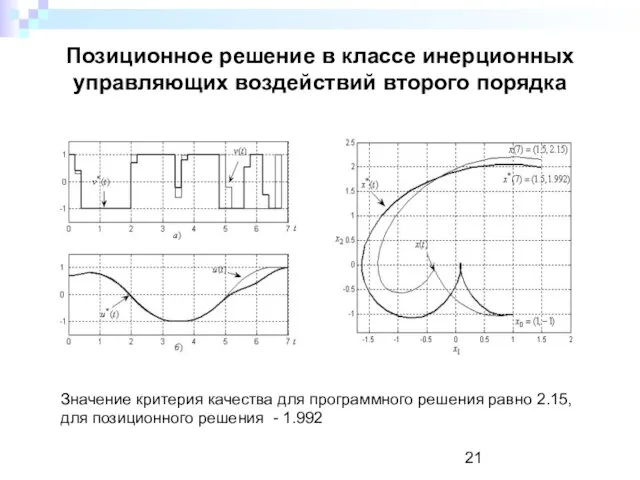
- 21. Позиционное решение в классе инерционных управляющих воздействий второго порядка Значение критерия качества для программного решения равно
- 22. Заключение В данной работе исследованы терминальные задачи ОУ в классе инерционных управлений первого и второго порядков
- 23. Опуликованность результатов Тезисы совместного с Н.С. Павленок доклада опубликованы в сборнике конференции «Еругинские чтения - 2009»
- 25. Скачать презентацию
Слайд 3Поставленные цели и задачи
Реализовать моделирование режима реального времени
Провести сравнительный анализ программного и
Поставленные цели и задачи
Реализовать моделирование режима реального времени
Провести сравнительный анализ программного и
Слайд 4Объект исследования. Методы исследования. Область применения
Объект исследования – задачи в классах инерционных
Объект исследования. Методы исследования. Область применения
Объект исследования – задачи в классах инерционных
Слайд 5Актуальность
Возможность построения реализации оптимальной обратной связи позволит управлять системой в режиме реального
Актуальность
Возможность построения реализации оптимальной обратной связи позволит управлять системой в режиме реального
Слайд 6Инерционные управляющие воздействия первого порядка.
Постановка задачи
Пусть промежуток управления. Скалярную функцию
Инерционные управляющие воздействия первого порядка.
Постановка задачи
Пусть промежуток управления. Скалярную функцию
Слайд 7Задача с фазовыми ограничениями
Если ввести дополнительную фазовую переменную , то задачу
Задача с фазовыми ограничениями
Если ввести дополнительную фазовую переменную , то задачу
Слайд 8Эквивалентная функциональная форма
Задача (2) эквивалентна следующей задаче линейного программирования (ЛП)
(4)
элементы которой
Эквивалентная функциональная форма
Задача (2) эквивалентна следующей задаче линейного программирования (ЛП)
(4)
элементы которой
Слайд 9Программное решение в классе инерционных управляющих воздействий первого порядка
Рассмотрим терминальную задачу управления
(5)
Программное решение в классе инерционных управляющих воздействий первого порядка
Рассмотрим терминальную задачу управления
(5)
Слайд 10Позиционное решение
Для того, чтобы ввести понятие позиционного решения, рассматриваемую в классе инерционных
Позиционное решение
Для того, чтобы ввести понятие позиционного решения, рассматриваемую в классе инерционных
Слайд 11Оптимальная обратная связь
Функцию
(8)
назовем оптимальным управляющим сигналом типа (дискретной) обратной связи
Оптимальная обратная связь
Функцию
(8)
назовем оптимальным управляющим сигналом типа (дискретной) обратной связи
Слайд 12Позиционное решение в классе инерционных управляющих воздействий первого порядка
На примере задачи управления
Позиционное решение в классе инерционных управляющих воздействий первого порядка
На примере задачи управления
Слайд 13Моделирование режима реального времени
На примере задачи в классе инерционных управлений первого
Моделирование режима реального времени
На примере задачи в классе инерционных управлений первого
Слайд 14Моделирование режима реального времени.
Если вычисления будут происходить с задержкой значение критерия качества
Моделирование режима реального времени.
Если вычисления будут происходить с задержкой значение критерия качества
Слайд 15
Моделирование режима реального времени.
Если вычисления будут происходить с задержкой значение
Моделирование режима реального времени.
Если вычисления будут происходить с задержкой значение
Слайд 16Инерционные управляющие воздействия второго порядка.
Постановка задачи
Пусть промежуток управления. Скалярную функцию u(t),
Инерционные управляющие воздействия второго порядка.
Постановка задачи
Пусть промежуток управления. Скалярную функцию u(t),
Слайд 17Задача с фазовыми ограничениями
Если ввести дополнительные фазовые переменные , то задачу (14)
Задача с фазовыми ограничениями
Если ввести дополнительные фазовые переменные , то задачу (14)
Слайд 18Эквивалентная функциональная форма
Задача (14) эквивалентна следующей задаче линейного программирования (ЛП)
(16)
элементы которой
Эквивалентная функциональная форма
Задача (14) эквивалентна следующей задаче линейного программирования (ЛП)
(16)
элементы которой
Слайд 19Программное решение в классе инерционных управляющих воздействий второго порядка
Рассмотрим терминальную задачу управления
(17)
Программное решение в классе инерционных управляющих воздействий второго порядка
Рассмотрим терминальную задачу управления
(17)
Слайд 20Позиционное решение в классе инерционных управляющих воздействий второго порядка
В классе инерционных управляющих
Позиционное решение в классе инерционных управляющих воздействий второго порядка
В классе инерционных управляющих
Слайд 21Позиционное решение в классе инерционных управляющих воздействий второго порядка
Значение критерия качества для
Позиционное решение в классе инерционных управляющих воздействий второго порядка
Значение критерия качества для
Слайд 22Заключение
В данной работе исследованы терминальные задачи ОУ в классе инерционных управлений первого
Заключение
В данной работе исследованы терминальные задачи ОУ в классе инерционных управлений первого
Слайд 23Опуликованность результатов
Тезисы совместного с Н.С. Павленок доклада опубликованы в сборнике конференции «Еругинские
Опуликованность результатов
Тезисы совместного с Н.С. Павленок доклада опубликованы в сборнике конференции «Еругинские
 “ Прорывные проекты АО “ Национальная компания “КазМунайГаз”
“ Прорывные проекты АО “ Национальная компания “КазМунайГаз” Leçon dix
Leçon dix Банковская система Турции. Сравнение с Россией
Банковская система Турции. Сравнение с Россией Приключения Флоры
Приключения Флоры Барклай де Толли
Барклай де Толли КОМЕТА 3
КОМЕТА 3 Основы HTML. Разработка Web-сайта
Основы HTML. Разработка Web-сайта «Социально-экономическое будущее села Умыган»
«Социально-экономическое будущее села Умыган» Результативность занятий по дополнительным образовательным программам 2019-20 уч.год
Результативность занятий по дополнительным образовательным программам 2019-20 уч.год Наша планета Земля - огромная и удивительная
Наша планета Земля - огромная и удивительная Графическая работа №7 Эскиз вала
Графическая работа №7 Эскиз вала Доклад Партнерские связи Лешуконского, Мезенского и Пинежского районов как способ развития территории
Доклад Партнерские связи Лешуконского, Мезенского и Пинежского районов как способ развития территории Проверка и калибровка комплектов регулирования температур
Проверка и калибровка комплектов регулирования температур Использование новых информационных технологий в преподавании иностранного языка
Использование новых информационных технологий в преподавании иностранного языка Анализ МОУ гимназии №2 г.Иркутска по основным показателям работы
Анализ МОУ гимназии №2 г.Иркутска по основным показателям работы ИКТ в обучении английскому языку
ИКТ в обучении английскому языку Сигнализация на железнодорожном транспорте
Сигнализация на железнодорожном транспорте Citation бриф (002)
Citation бриф (002) Чары. Секретный день…
Чары. Секретный день… Чудесная раковина
Чудесная раковина Прокариоты
Прокариоты Капитализация человеческого потенциала в (моно)городах: практика и технологии
Капитализация человеческого потенциала в (моно)городах: практика и технологии Аудит операций с материальнопроизводственными запасами. Лекция 9
Аудит операций с материальнопроизводственными запасами. Лекция 9 Информация
Информация Административная ответственность несовершеннолетних
Административная ответственность несовершеннолетних Презентация "Струнно-смычковые" - скачать презентации по МХК
Презентация "Струнно-смычковые" - скачать презентации по МХК Kонкурентные преимущества изделий группы Талема
Kонкурентные преимущества изделий группы Талема Алтай
Алтай