- Беспилотная мусорная машина с повышенной маневренностью

Содержание
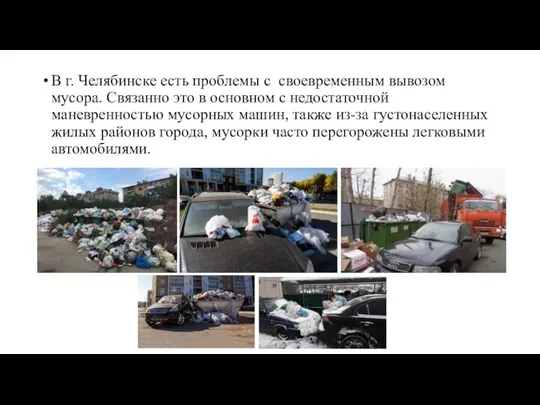
- 2. В г. Челябинске есть проблемы с своевременным вывозом мусора. Связанно это в основном с недостаточной маневренностью
- 3. Идея: создать прототип беспилотной мусорной машины с повышенной маневренностью
- 4. Цель: создать прототип беспилотной мусорной машины Задачи: 1. Выбрать конструкцию. 2. Разработать захват схожий на захват
- 5. Актуальность: Эта полезная модель несёт практический и теоретический интересы для администрации г. Челябинска и компаний занимающихся
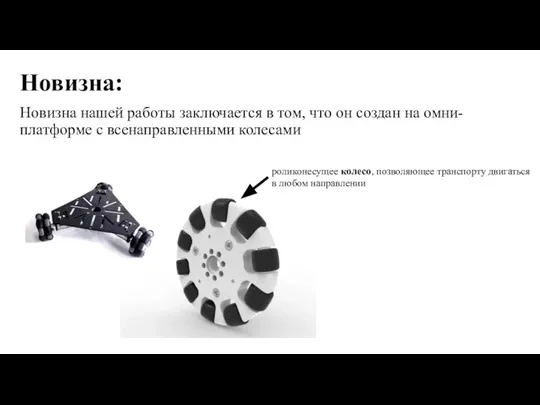
- 6. Новизна: Новизна нашей работы заключается в том, что он создан на омни-платформе с всенаправленными колесами роликонесущее
- 7. Материалы которые мы использовали Этот профиль позволяет сделать жёсткий каркас и очень быстро т.к скреплять его
- 8. Фанеру мы использовали для основы каркаса
- 9. Для создания захвата манипулятора мы использовали пластик PLA, а также его же мы использовали для создания
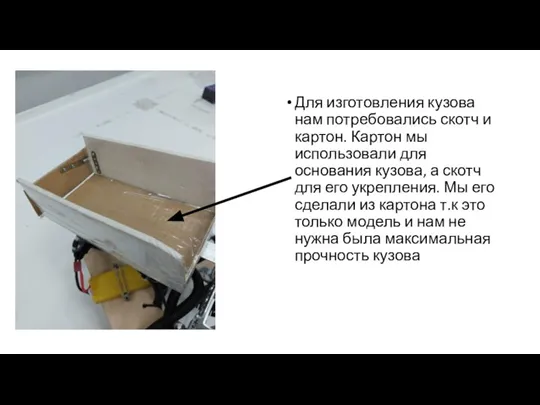
- 10. Для изготовления кузова нам потребовались скотч и картон. Картон мы использовали для основания кузова, а скотч
- 11. Электронные компоненты, которые мы использовали Микрокомпьютер Mindstorms EV3. Этот микрокомпьютер программируется на платформе LabView и официальной
- 12. Также мы использовали контроллер servo-моторов в дополнение к микрокомпьютеру для подключения моторов из набора TETRIX
- 13. Ультразвуковой датчик NXT для определения расстояния до столкновения со стенкой
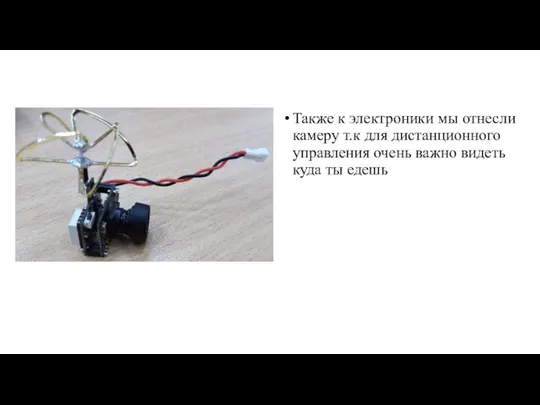
- 14. Также к электроники мы отнесли камеру т.к для дистанционного управления очень важно видеть куда ты едешь
- 15. В роботе мы использовали гофрированную трубу для укладки проводов согласно ГОСТ Р 56555-2015 Слаботочные системы. Кабельные
- 16. Проводка В гофру мы уложили несколько видов проводов. Одни из них это обычные провода для подключения
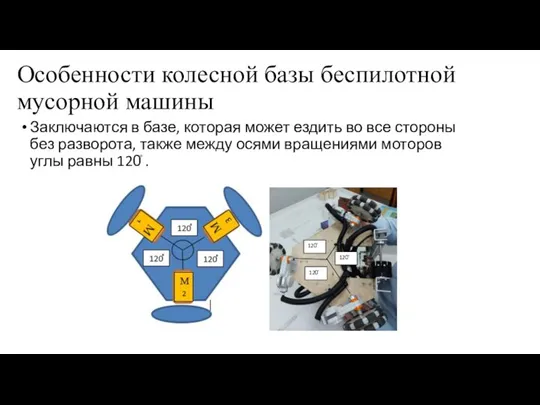
- 17. Особенности колесной базы беспилотной мусорной машины Заключаются в базе, которая может ездить во все стороны без
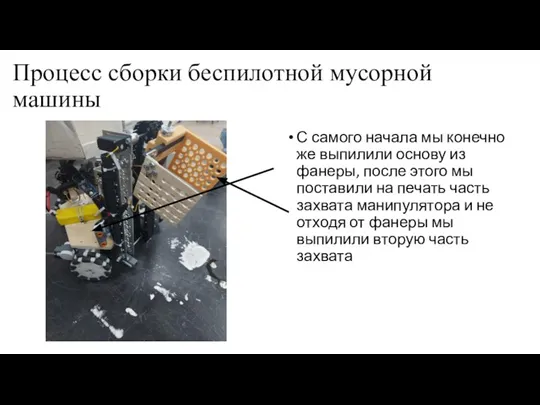
- 18. Процесс сборки беспилотной мусорной машины С самого начала мы конечно же выпилили основу из фанеры, после
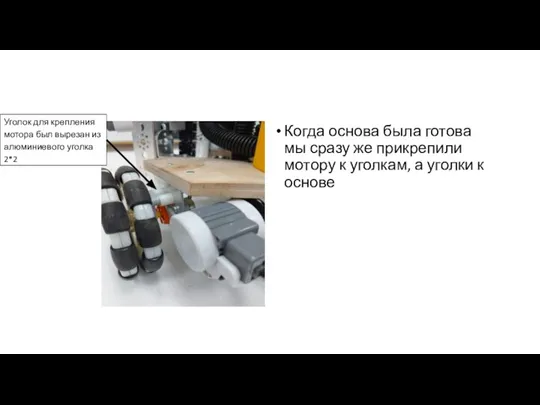
- 19. Когда основа была готова мы сразу же прикрепили мотору к уголкам, а уголки к основе Уголок
- 20. Также мы собрали каркас манипулятора и прикрепили его к основе робота и после крепления мы прикрепили
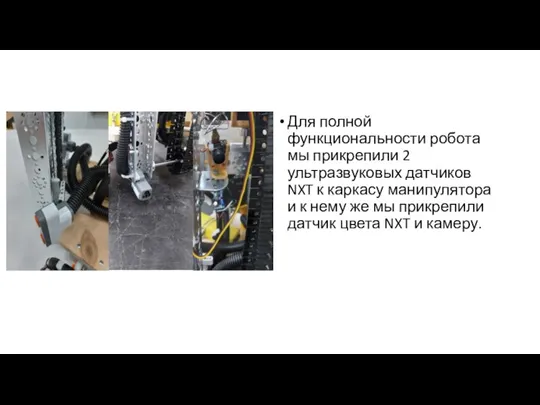
- 21. Для полной функциональности робота мы прикрепили 2 ультразвуковых датчиков NXT к каркасу манипулятора и к нему
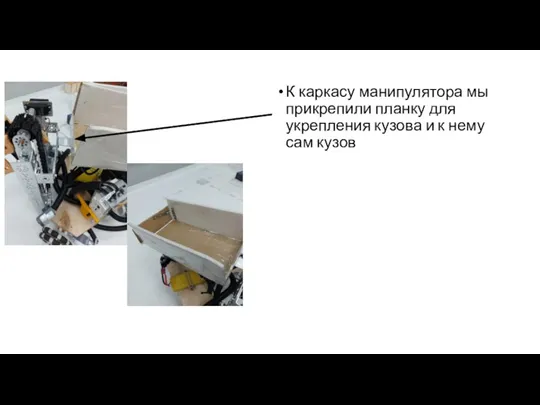
- 22. К каркасу манипулятора мы прикрепили планку для укрепления кузова и к нему сам кузов
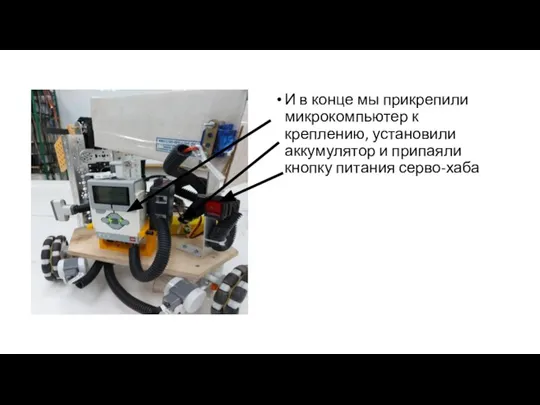
- 23. И в конце мы прикрепили микрокомпьютер к креплению, установили аккумулятор и припаяли кнопку питания серво-хаба
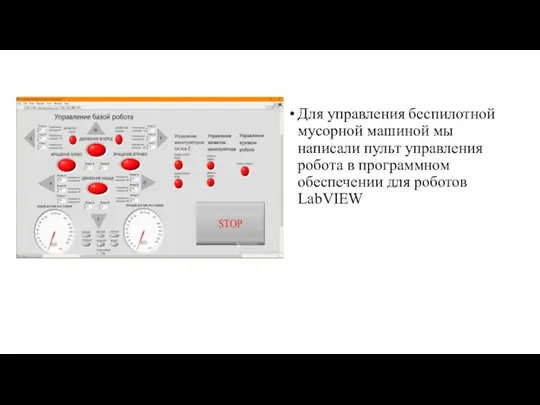
- 24. Для управления беспилотной мусорной машиной мы написали пульт управления робота в программном обеспечении для роботов LabVIEW
- 25. Данный проект соответствует целям и задачам, поставленным в начале работы. Изготовленная нами беспилотная мусорная машина успешно
- 27. Скачать презентацию
Слайд 3Идея: создать прототип беспилотной мусорной машины с повышенной маневренностью
Идея: создать прототип беспилотной мусорной машины с повышенной маневренностью

Слайд 4Цель: создать прототип беспилотной мусорной машины
Задачи:
1. Выбрать конструкцию.
2. Разработать захват схожий на
Цель: создать прототип беспилотной мусорной машины
Задачи:
1. Выбрать конструкцию.
2. Разработать захват схожий на
Слайд 5Актуальность:
Эта полезная модель несёт практический и теоретический интересы для администрации г. Челябинска
Актуальность:
Эта полезная модель несёт практический и теоретический интересы для администрации г. Челябинска
Слайд 6Новизна:
Новизна нашей работы заключается в том, что он создан на омни-платформе с
Новизна:
Новизна нашей работы заключается в том, что он создан на омни-платформе с
Слайд 7Материалы которые мы использовали
Этот профиль позволяет сделать жёсткий каркас и очень быстро
Материалы которые мы использовали
Этот профиль позволяет сделать жёсткий каркас и очень быстро

Слайд 8Фанеру мы использовали для основы каркаса
Фанеру мы использовали для основы каркаса

Слайд 9Для создания захвата манипулятора мы использовали пластик PLA, а также его же
Для создания захвата манипулятора мы использовали пластик PLA, а также его же

Слайд 10Для изготовления кузова нам потребовались скотч и картон. Картон мы использовали для
Для изготовления кузова нам потребовались скотч и картон. Картон мы использовали для
Слайд 11Электронные компоненты, которые мы использовали
Микрокомпьютер Mindstorms EV3. Этот микрокомпьютер программируется на платформе
Электронные компоненты, которые мы использовали
Микрокомпьютер Mindstorms EV3. Этот микрокомпьютер программируется на платформе

Слайд 12Также мы использовали контроллер servo-моторов в дополнение к микрокомпьютеру для подключения моторов
Также мы использовали контроллер servo-моторов в дополнение к микрокомпьютеру для подключения моторов

Слайд 13Ультразвуковой датчик NXT для определения расстояния до столкновения со стенкой
Ультразвуковой датчик NXT для определения расстояния до столкновения со стенкой

Слайд 14Также к электроники мы отнесли камеру т.к для дистанционного управления очень важно
Также к электроники мы отнесли камеру т.к для дистанционного управления очень важно
Слайд 15В роботе мы использовали гофрированную трубу для укладки проводов согласно ГОСТ Р
В роботе мы использовали гофрированную трубу для укладки проводов согласно ГОСТ Р

Слайд 16Проводка
В гофру мы уложили несколько видов проводов. Одни из них это обычные
Проводка
В гофру мы уложили несколько видов проводов. Одни из них это обычные

Слайд 17Особенности колесной базы беспилотной мусорной машины
Заключаются в базе, которая может ездить во
Особенности колесной базы беспилотной мусорной машины
Заключаются в базе, которая может ездить во
Слайд 18Процесс сборки беспилотной мусорной машины
С самого начала мы конечно же выпилили основу
Процесс сборки беспилотной мусорной машины
С самого начала мы конечно же выпилили основу
Слайд 19Когда основа была готова мы сразу же прикрепили мотору к уголкам, а
Когда основа была готова мы сразу же прикрепили мотору к уголкам, а
Слайд 20Также мы собрали каркас манипулятора и прикрепили его к основе робота и
Также мы собрали каркас манипулятора и прикрепили его к основе робота и

Слайд 21Для полной функциональности робота мы прикрепили 2 ультразвуковых датчиков NXT к каркасу
Для полной функциональности робота мы прикрепили 2 ультразвуковых датчиков NXT к каркасу
Слайд 22К каркасу манипулятора мы прикрепили планку для укрепления кузова и к нему
К каркасу манипулятора мы прикрепили планку для укрепления кузова и к нему
Слайд 23И в конце мы прикрепили микрокомпьютер к креплению, установили аккумулятор и припаяли
И в конце мы прикрепили микрокомпьютер к креплению, установили аккумулятор и припаяли
Слайд 24Для управления беспилотной мусорной машиной мы написали пульт управления робота в программном
Для управления беспилотной мусорной машиной мы написали пульт управления робота в программном
Слайд 25Данный проект соответствует целям и задачам, поставленным в начале работы. Изготовленная нами
Данный проект соответствует целям и задачам, поставленным в начале работы. Изготовленная нами
 Авторское право. Общие положения
Авторское право. Общие положения «ПРАДЕДУШКА» БЕНЗИНА
«ПРАДЕДУШКА» БЕНЗИНА Inera – Leasing Lite Edition Лизинговое решение на платформе Dynamics AX
Inera – Leasing Lite Edition Лизинговое решение на платформе Dynamics AX Мемлекеттің саяси жүйесі Конституцияда нақты көрініс тапқан
Мемлекеттің саяси жүйесі Конституцияда нақты көрініс тапқан Презентация на тему Пейзаж в литературе, музыке и живописи
Презентация на тему Пейзаж в литературе, музыке и живописи Христианские и языческие мотивы в повестях Н.В. Гоголя
Христианские и языческие мотивы в повестях Н.В. Гоголя Періодичність тригонометричних функцій. Побудова графіків тригонометричних
Періодичність тригонометричних функцій. Побудова графіків тригонометричних Nobel_Prize_Winners_RAS
Nobel_Prize_Winners_RAS Урок 5 класс
Урок 5 класс Расценки
Расценки Табличный процессор EXCEL
Табличный процессор EXCEL Презентация на тему Природные зоны Африки
Презентация на тему Природные зоны Африки  Эконометрика и эконометрическое моделирование
Эконометрика и эконометрическое моделирование Все народы воспевают мудрость старости
Все народы воспевают мудрость старости Понятие информации. 10 класс
Понятие информации. 10 класс Відмінність тварин
Відмінність тварин Портфолио как форма оценки индивидуальных образовательных достижений обучающихся
Портфолио как форма оценки индивидуальных образовательных достижений обучающихся Разминирование железных дорог. Приемы обнаружения мин различными средствами поиска
Разминирование железных дорог. Приемы обнаружения мин различными средствами поиска Ключевые проекты и направления
Ключевые проекты и направления Яниславицкая культура в Белорусском Понеманье
Яниславицкая культура в Белорусском Понеманье Мониторинг качества образования в 2017-2018 учебном году
Мониторинг качества образования в 2017-2018 учебном году The early middle ages
The early middle ages Декабрь, 2011 год.
Декабрь, 2011 год. Золушка
Золушка Устройство компьютера
Устройство компьютера Key Exchange Solutions
Key Exchange Solutions Презентация на тему Большое путешествие на луну
Презентация на тему Большое путешествие на луну  Кейс – технологии и инфографика при подготовке к ЕГЭ по русскому языку
Кейс – технологии и инфографика при подготовке к ЕГЭ по русскому языку