- Числовое программное управление (ЧПУ)

Содержание
- 2. Числовое программное управление (ЧПУ) станком — управление обработкой заготовки на станке по УП, в которой данные
- 3. • Станки с ЧПУ стремительно внедряются в производственную сферу Теоретически любой станок с ручным управлением может
- 4. Подсистема управления Сердцем подсистемы управлении является контроллер (процессор), который обычно расположен в корпусе стойки ЧПУ. Системы
- 5. так и открытыми, ПК - совместимыми
- 6. 2. Подсистема приводов Подсистема приводов включает в себя различные двигатели и винтовые передачи для окончательного выполнения
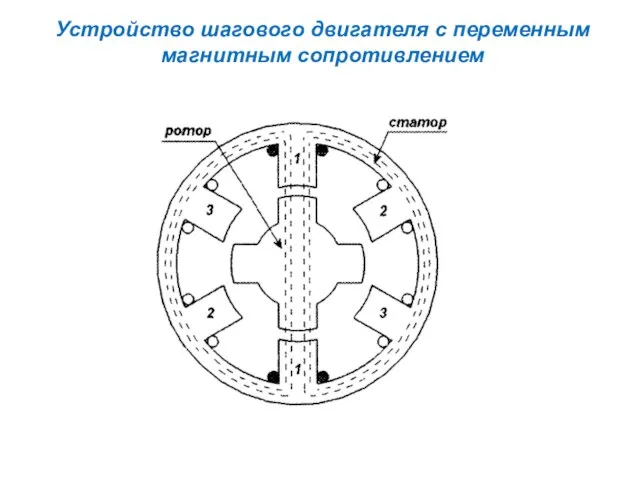
- 7. Устройство шагового двигателя с переменным магнитным сопротивлением
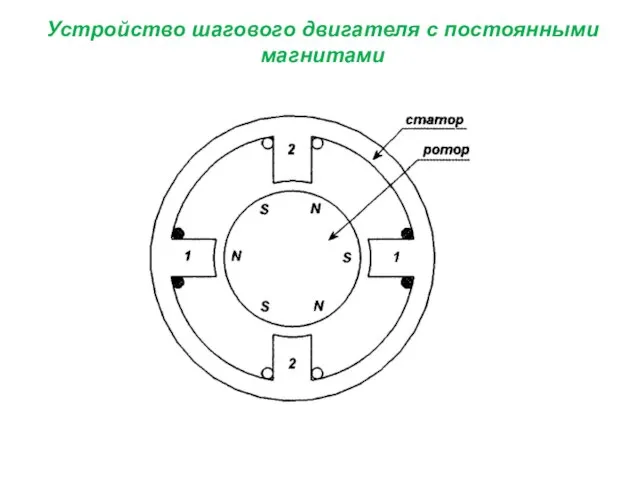
- 8. Устройство шагового двигателя с постоянными магнитами
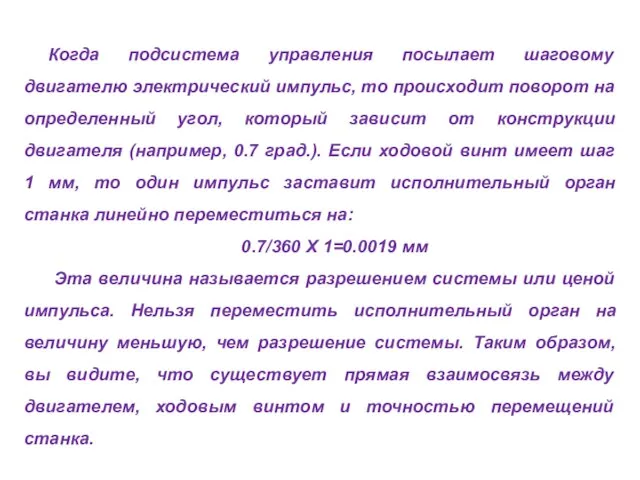
- 9. Когда подсистема управления посылает шаговому двигателю электрический импульс, то происходит поворот на определенный угол, который зависит
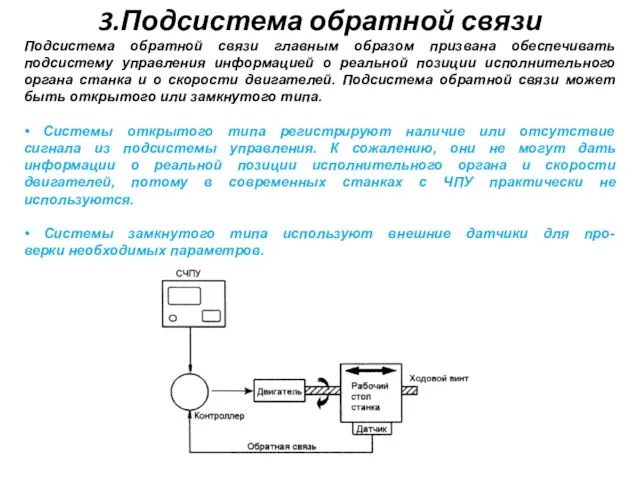
- 10. 3.Подсистема обратной связи Подсистема обратной связи главным образом призвана обеспечивать подсистему управления информацией о реальной позиции
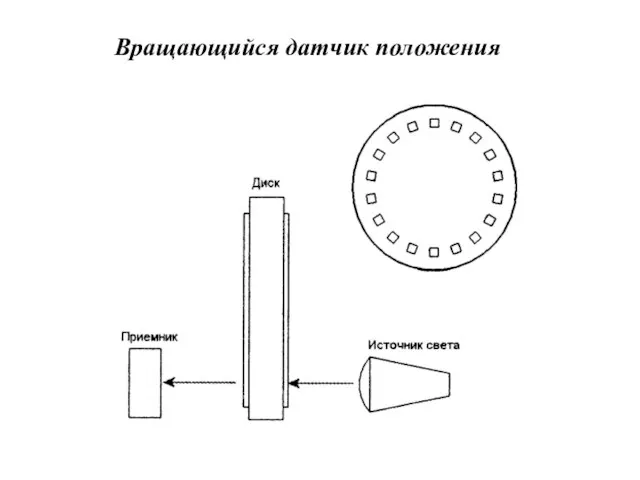
- 11. Вращающийся датчик положения
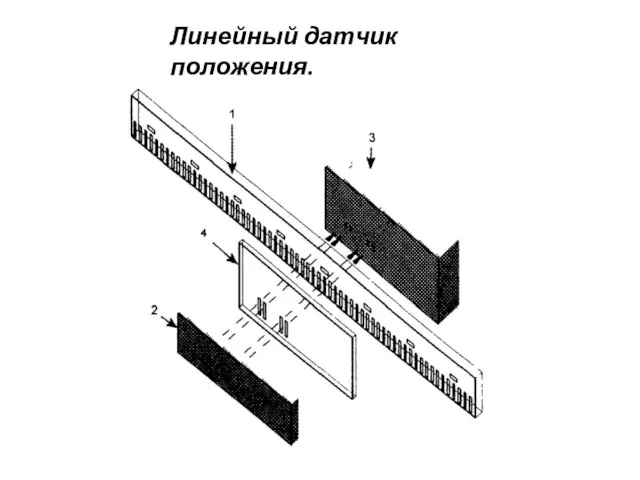
- 12. Линейный датчик положения.
- 13. Датчики состояния исполнительных органов: Температурные датчики (термопары) Инфракрасные датчики
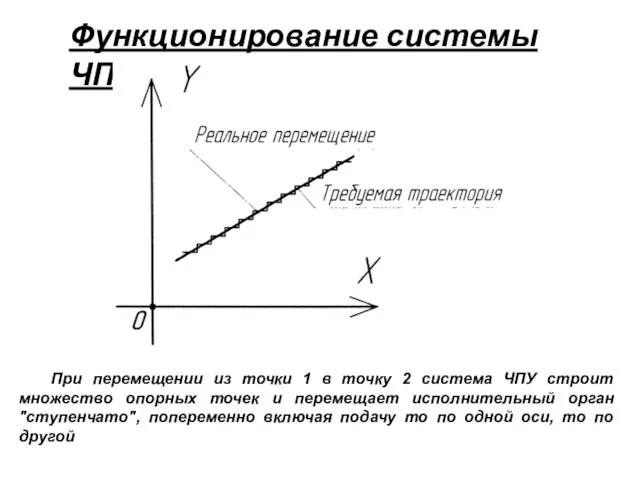
- 14. Функционирование системы ЧПУ При перемещении из точки 1 в точку 2 система ЧПУ строит множество опорных
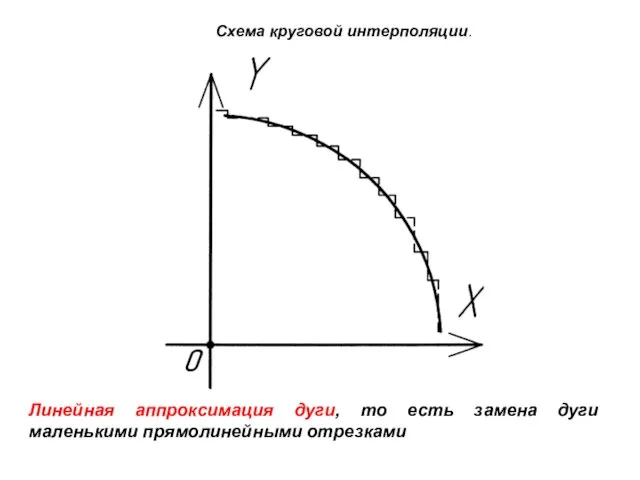
- 15. Схема круговой интерполяции. Линейная аппроксимация дуги, то есть замена дуги маленькими прямолинейными отрезками
- 17. Скачать презентацию
Слайд 3• Станки с ЧПУ стремительно внедряются в производственную сферу Теоретически любой станок
• Станки с ЧПУ стремительно внедряются в производственную сферу Теоретически любой станок
Слайд 4Подсистема управления
Сердцем подсистемы управлении является контроллер (процессор), который обычно расположен в
Подсистема управления
Сердцем подсистемы управлении является контроллер (процессор), который обычно расположен в

Слайд 5так и открытыми, ПК - совместимыми
так и открытыми, ПК - совместимыми

Слайд 62. Подсистема приводов
Подсистема приводов включает в себя различные двигатели и винтовые
2. Подсистема приводов
Подсистема приводов включает в себя различные двигатели и винтовые
Слайд 7Устройство шагового двигателя с переменным магнитным сопротивлением
Устройство шагового двигателя с переменным магнитным сопротивлением
Слайд 8Устройство шагового двигателя с постоянными магнитами
Устройство шагового двигателя с постоянными магнитами
Слайд 9Когда подсистема управления посылает шаговому двигателю электрический импульс, то происходит поворот на
Когда подсистема управления посылает шаговому двигателю электрический импульс, то происходит поворот на
Слайд 103.Подсистема обратной связи
Подсистема обратной связи главным образом призвана обеспечивать
подсистему управления информацией
3.Подсистема обратной связи
Подсистема обратной связи главным образом призвана обеспечивать
подсистему управления информацией
Слайд 11Вращающийся датчик положения
Вращающийся датчик положения
Слайд 12Линейный датчик положения.
Линейный датчик положения.
Слайд 13Датчики состояния исполнительных органов:
Температурные датчики (термопары)
Инфракрасные датчики
Датчики состояния исполнительных органов:
Температурные датчики (термопары)
Инфракрасные датчики
Слайд 14Функционирование системы ЧПУ
При перемещении из точки 1 в точку 2 система
Функционирование системы ЧПУ
При перемещении из точки 1 в точку 2 система
Слайд 15Схема круговой интерполяции.
Линейная аппроксимация дуги, то есть замена дуги маленькими прямолинейными
Схема круговой интерполяции.
Линейная аппроксимация дуги, то есть замена дуги маленькими прямолинейными
 Харківський Національний Автомобільно-дорожній Університет (ХНАДУ)
Харківський Національний Автомобільно-дорожній Університет (ХНАДУ) Расчеты по уравнениям реакций, протекающих в растворах
Расчеты по уравнениям реакций, протекающих в растворах Компютърна графикаГенериране на графично изображение (визуализация)
Компютърна графикаГенериране на графично изображение (визуализация) Первый день творения (земля, вода, небо)
Первый день творения (земля, вода, небо) Костюмы народов России
Костюмы народов России Анализ дизайна интернет - сайтов
Анализ дизайна интернет - сайтов Налоговый контроль как направление финансового контроля
Налоговый контроль как направление финансового контроля Япония: территория, границы, население
Япония: территория, границы, население НСПЭ
НСПЭ Технологический подход к организации образовательного процесса
Технологический подход к организации образовательного процесса ЭнергоДозор. Энергия, которую научился добывать
ЭнергоДозор. Энергия, которую научился добывать XXIV Национальный конкурс детских театров моды и студий костюмов
XXIV Национальный конкурс детских театров моды и студий костюмов Личностные корреляты проявления толерантного поведения подростов
Личностные корреляты проявления толерантного поведения подростов Размножение организмов 6 класс
Размножение организмов 6 класс Основные и дополнительные цвета, составление геометрического узора в круге, работа в цвете
Основные и дополнительные цвета, составление геометрического узора в круге, работа в цвете Знаки препинания при Вводных словах и словосочетаниях
Знаки препинания при Вводных словах и словосочетаниях Основная образовательная программа начального общего образования
Основная образовательная программа начального общего образования Годовой отчет как инструмент IR: советы по подготовке
Годовой отчет как инструмент IR: советы по подготовке Техника выполнения лечебных процедур.
Техника выполнения лечебных процедур. Антигены, антигены микроорганизмов
Антигены, антигены микроорганизмов  Презентация на тему Речь и мышление
Презентация на тему Речь и мышление  Практический курс китайского языка. (Урок 4)
Практический курс китайского языка. (Урок 4) Родительское собрание для родителей будущих первоклассников
Родительское собрание для родителей будущих первоклассников Архитектура – это музыка в камне
Архитектура – это музыка в камне Применение инструментов имитационного моделирования в логистике
Применение инструментов имитационного моделирования в логистике Презентация_темы_1_3_Инвестиционные_проекты_экономическое_содержание
Презентация_темы_1_3_Инвестиционные_проекты_экономическое_содержание Рослинні тканини
Рослинні тканини Работа с тонким металлом
Работа с тонким металлом