- Циклические алгоритмы

Содержание
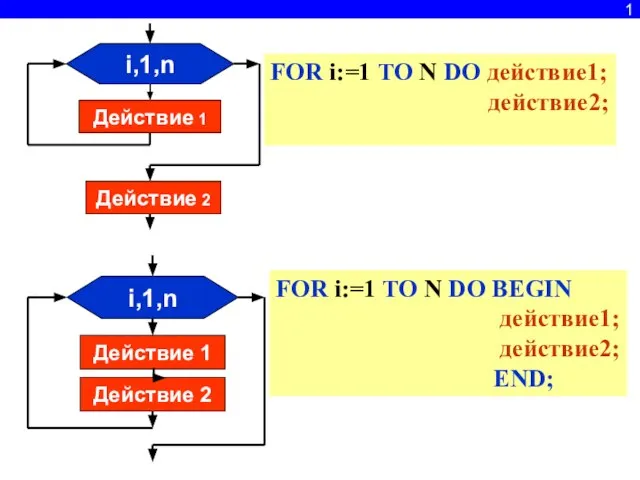
- 2. FOR i:=1 TO N DO BEGIN действие1; действие2; END; FOR i:=1 TO N DO действие1; действие2;
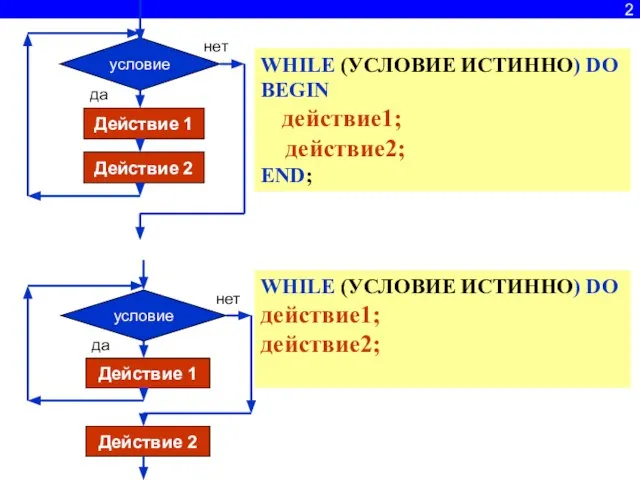
- 3. 2 WHILE (УСЛОВИЕ ИСТИННО) DO BEGIN действие1; действие2; END; WHILE (УСЛОВИЕ ИСТИННО) DO действие1; действие2;
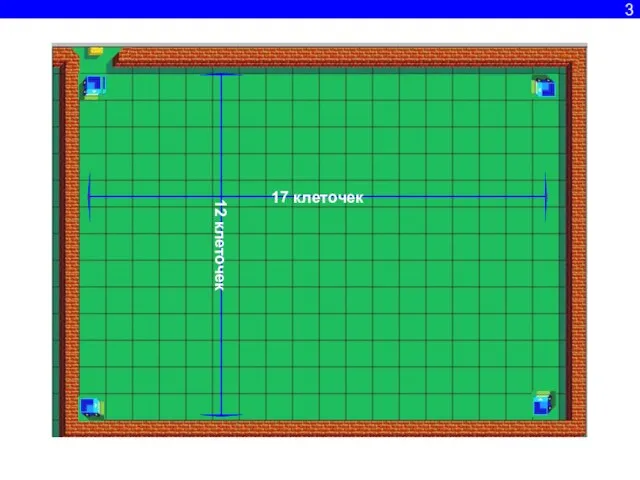
- 4. 3 17 клеточек 12 клеточек
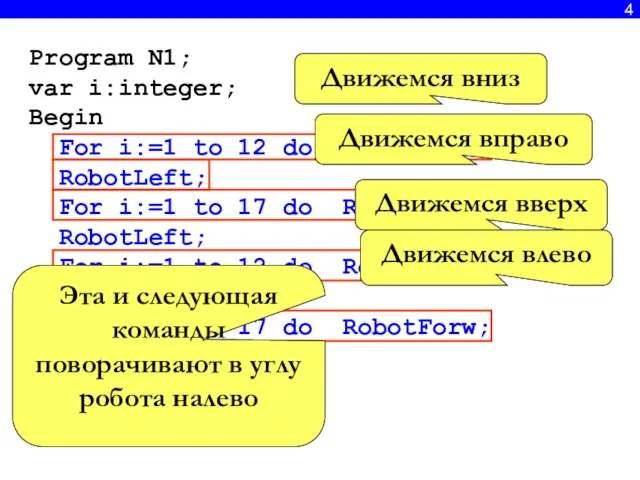
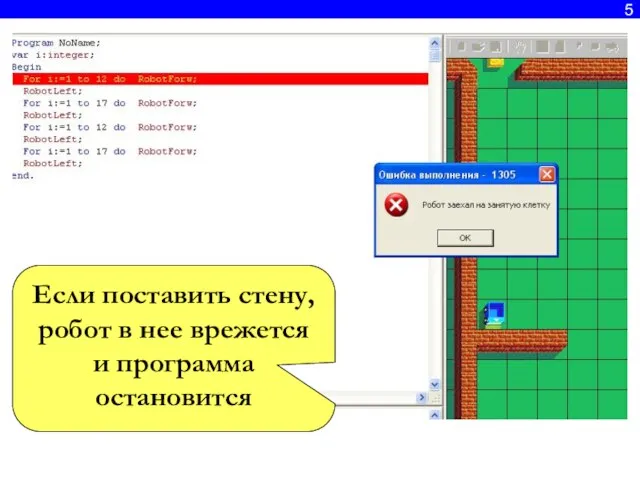
- 5. 4 Program N1; var i:integer; Begin For i:=1 to 12 do RobotForw; RobotLeft; For i:=1 to
- 6. 5 Если поставить стену, робот в нее врежется и программа остановится
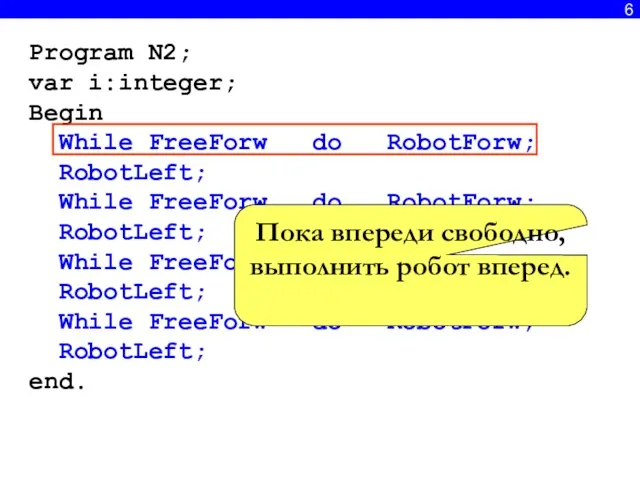
- 7. 6 Program N2; var i:integer; Begin While FreeForw do RobotForw; RobotLeft; While FreeForw do RobotForw; RobotLeft;
- 8. 7
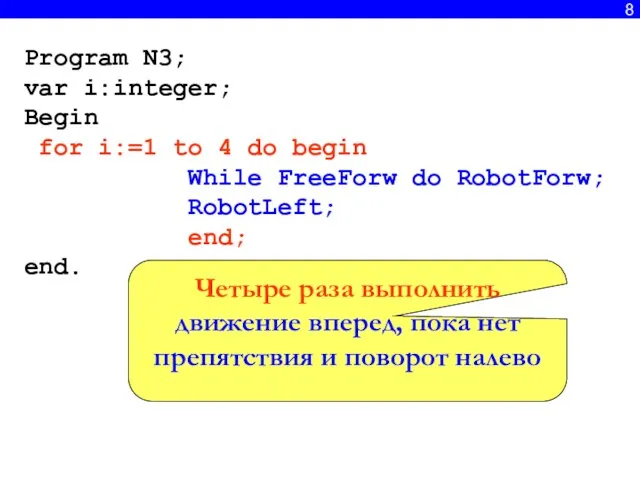
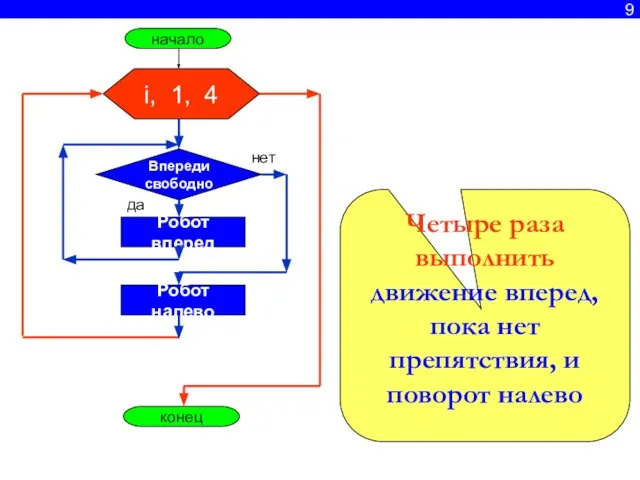
- 9. 8 Program N3; var i:integer; Begin for i:=1 to 4 do begin While FreeForw do RobotForw;
- 10. 9 Четыре раза выполнить движение вперед, пока нет препятствия, и поворот налево
- 11. 10 Задания для самостоятельной работы Задание 1. У левой стены обстановки в произвольном месте ставится препятствие.
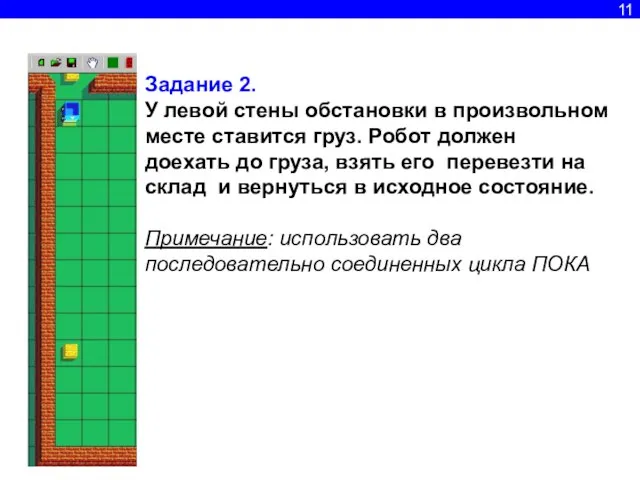
- 12. 11 Задание 2. У левой стены обстановки в произвольном месте ставится груз. Робот должен доехать до
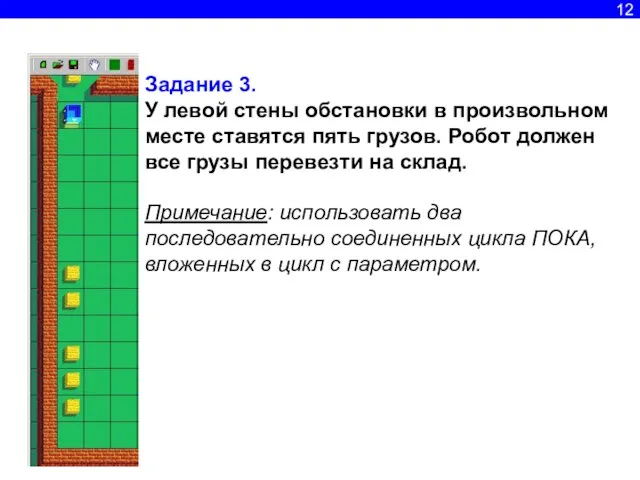
- 13. 12 Задание 3. У левой стены обстановки в произвольном месте ставятся пять грузов. Робот должен все
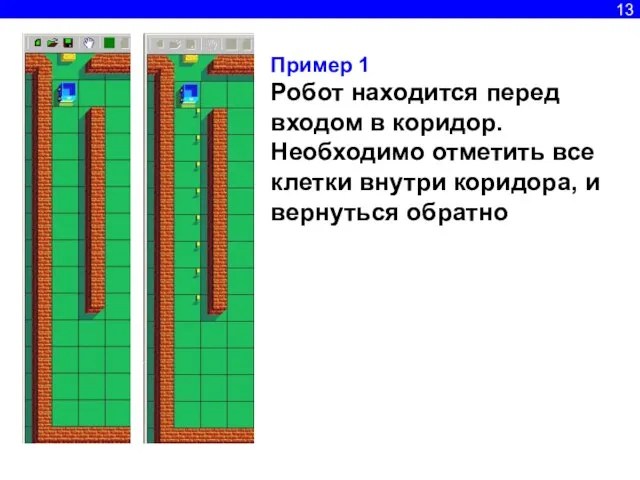
- 14. 13 Пример 1 Робот находится перед входом в коридор. Необходимо отметить все клетки внутри коридора, и
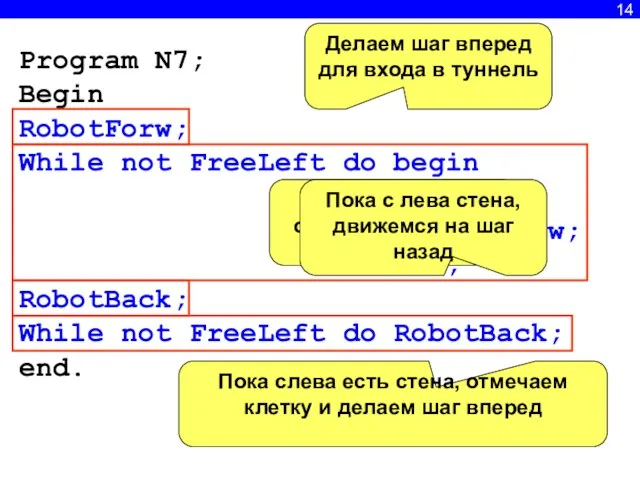
- 15. 14 Program N7; Begin RobotForw; While not FreeLeft do begin Select; RobotForw; end; RobotBack; While not
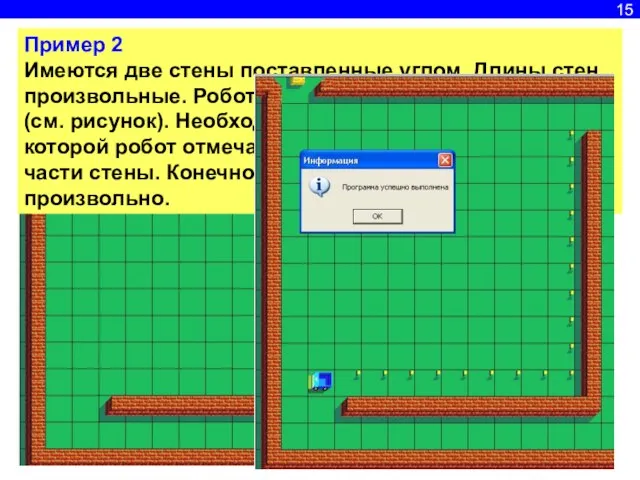
- 16. 15 Пример 2 Имеются две стены поставленные углом. Длины стен произвольные. Робот находится в углу между
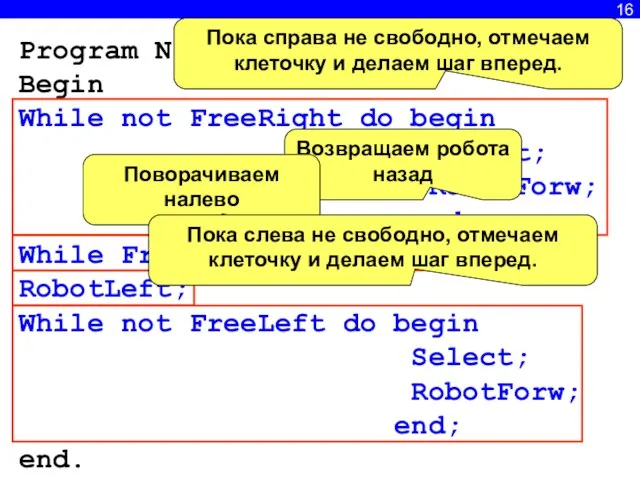
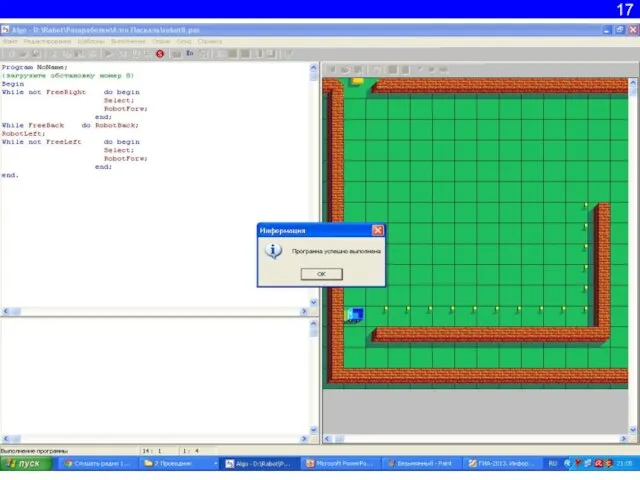
- 17. 16 Program N8; Begin While not FreeRight do begin Select; RobotForw; end; While FreeBack do RobotBack;
- 18. 17
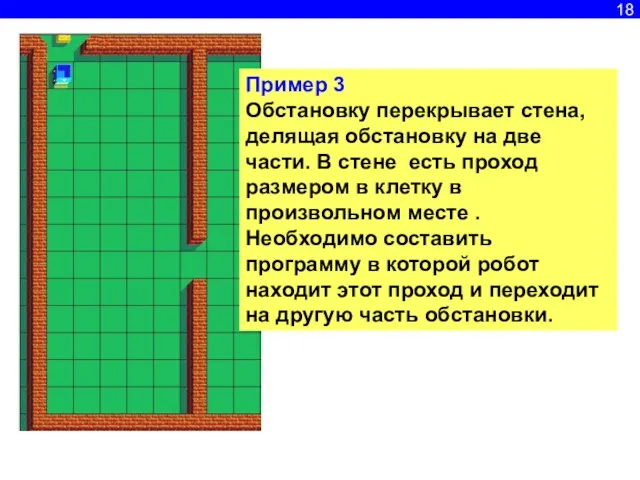
- 19. 18 Пример 3 Обстановку перекрывает стена, делящая обстановку на две части. В стене есть проход размером
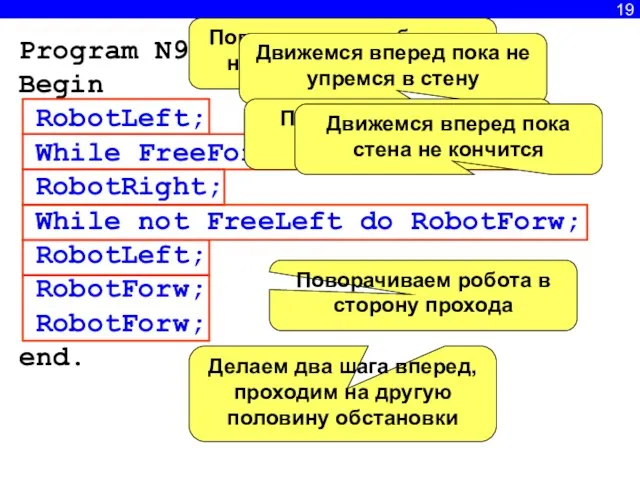
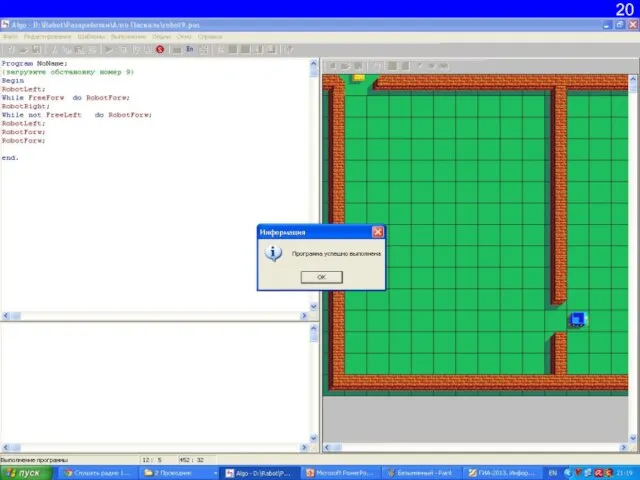
- 20. 19 Program N9; Begin RobotLeft; While FreeForw do RobotForw; RobotRight; While not FreeLeft do RobotForw; RobotLeft;
- 21. 20
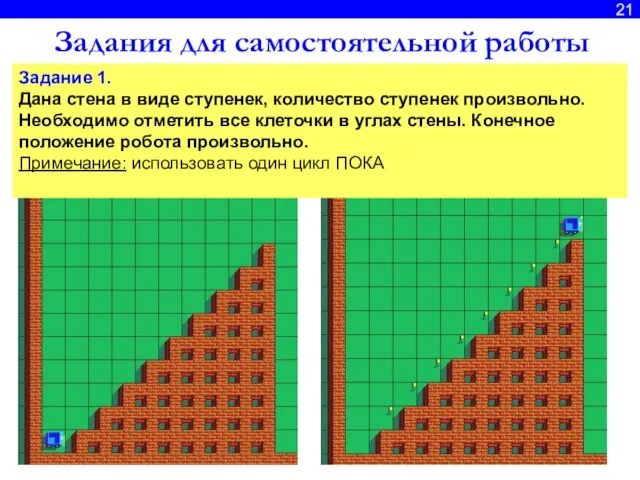
- 22. 21 Задания для самостоятельной работы Задание 1. Дана стена в виде ступенек, количество ступенек произвольно. Необходимо
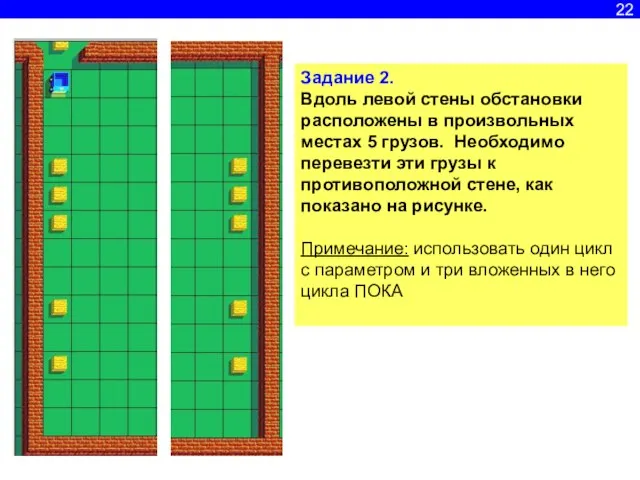
- 23. 22 Задание 2. Вдоль левой стены обстановки расположены в произвольных местах 5 грузов. Необходимо перевезти эти
- 25. Скачать презентацию
Слайд 32
WHILE (УСЛОВИЕ ИСТИННО) DO
BEGIN
действие1;
действие2;
END;
WHILE (УСЛОВИЕ ИСТИННО) DO
действие1;
действие2;
2
WHILE (УСЛОВИЕ ИСТИННО) DO
BEGIN
действие1;
действие2;
END;
WHILE (УСЛОВИЕ ИСТИННО) DO
действие1;
действие2;
Слайд 43
17 клеточек
12 клеточек
3
17 клеточек
12 клеточек
Слайд 54
Program N1;
var i:integer;
Begin
For i:=1 to 12 do RobotForw;
RobotLeft;
For
4
Program N1;
var i:integer;
Begin
For i:=1 to 12 do RobotForw;
RobotLeft;
For
Слайд 65
Если поставить стену, робот в нее врежется и программа остановится
5
Если поставить стену, робот в нее врежется и программа остановится
Слайд 76
Program N2;
var i:integer;
Begin
While FreeForw do RobotForw;
RobotLeft;
While FreeForw do
6
Program N2;
var i:integer;
Begin
While FreeForw do RobotForw;
RobotLeft;
While FreeForw do
Слайд 98
Program N3;
var i:integer;
Begin
for i:=1 to 4 do begin
While
8
Program N3;
var i:integer;
Begin
for i:=1 to 4 do begin
While
Слайд 109
Четыре раза выполнить движение вперед, пока нет препятствия, и поворот налево
9
Четыре раза выполнить движение вперед, пока нет препятствия, и поворот налево
Слайд 1110
Задания для самостоятельной работы
Задание 1.
У левой стены обстановки в произвольном месте ставится
10
Задания для самостоятельной работы
Задание 1.
У левой стены обстановки в произвольном месте ставится

Слайд 1211
Задание 2.
У левой стены обстановки в произвольном месте ставится груз. Робот должен
доехать
11
Задание 2.
У левой стены обстановки в произвольном месте ставится груз. Робот должен
доехать
Слайд 1312
Задание 3.
У левой стены обстановки в произвольном месте ставятся пять грузов. Робот
12
Задание 3.
У левой стены обстановки в произвольном месте ставятся пять грузов. Робот
Слайд 1413
Пример 1
Робот находится перед входом в коридор. Необходимо отметить все клетки внутри
13
Пример 1
Робот находится перед входом в коридор. Необходимо отметить все клетки внутри
Слайд 1514
Program N7;
Begin
RobotForw;
While not FreeLeft do begin
Select;
RobotForw;
end;
RobotBack;
While not FreeLeft
14
Program N7;
Begin
RobotForw;
While not FreeLeft do begin
Select;
RobotForw;
end;
RobotBack;
While not FreeLeft
Слайд 1615
Пример 2
Имеются две стены поставленные углом. Длины стен произвольные. Робот находится в
15
Пример 2
Имеются две стены поставленные углом. Длины стен произвольные. Робот находится в
Слайд 1716
Program N8;
Begin
While not FreeRight do begin
Select;
RobotForw;
end;
While FreeBack do
16
Program N8;
Begin
While not FreeRight do begin
Select;
RobotForw;
end;
While FreeBack do
Слайд 1817
17
Слайд 1918
Пример 3
Обстановку перекрывает стена, делящая обстановку на две части. В стене есть
18
Пример 3
Обстановку перекрывает стена, делящая обстановку на две части. В стене есть
Слайд 2019
Program N9;
Begin
RobotLeft;
While FreeForw do RobotForw;
RobotRight;
While not FreeLeft
19
Program N9;
Begin
RobotLeft;
While FreeForw do RobotForw;
RobotRight;
While not FreeLeft
Слайд 2120
20
Слайд 2221
Задания для самостоятельной работы
Задание 1.
Дана стена в виде ступенек, количество ступенек произвольно.
21
Задания для самостоятельной работы
Задание 1.
Дана стена в виде ступенек, количество ступенек произвольно.
Слайд 2322
Задание 2.
Вдоль левой стены обстановки расположены в произвольных местах 5 грузов. Необходимо
22
Задание 2.
Вдоль левой стены обстановки расположены в произвольных местах 5 грузов. Необходимо
 Урок-лабиринт. Древний Крит
Урок-лабиринт. Древний Крит Головные и лицевые боли. Анатомия лицевого, тройничного нервов
Головные и лицевые боли. Анатомия лицевого, тройничного нервов Я пытаюсь извлечь максимальный доход из того вида деятельности, которым занимаюсь!
Я пытаюсь извлечь максимальный доход из того вида деятельности, которым занимаюсь! Комплексная программа«Сетевой город»
Комплексная программа«Сетевой город» Масляные насосы
Масляные насосы Презентация на тему Элементарные факторы эволюции
Презентация на тему Элементарные факторы эволюции Металлы. Положение в ПСХЭ Д.И. Менделеева. Физические свойства металлов
Металлы. Положение в ПСХЭ Д.И. Менделеева. Физические свойства металлов Попов Алексей ПетровичЛАЗЕРНАЯ ДИАГНОСТИКА СИЛЬНОРАССЕИВАЮЩИХ СРЕД И ИЗМЕНЕНИЕ ИХ ОПТИЧЕСКИХ СВОЙСТВПУТЕМ ИМПЛАНТАЦИИ НАНОЧА
Попов Алексей ПетровичЛАЗЕРНАЯ ДИАГНОСТИКА СИЛЬНОРАССЕИВАЮЩИХ СРЕД И ИЗМЕНЕНИЕ ИХ ОПТИЧЕСКИХ СВОЙСТВПУТЕМ ИМПЛАНТАЦИИ НАНОЧА Наследование гемофилии- признака, сцепленного с полом.
Наследование гемофилии- признака, сцепленного с полом. Презентация на тему Нравственный поступок
Презентация на тему Нравственный поступок  Движение декабристов
Движение декабристов Контроль как метод управления финансовой деятельностью бюджетной организации
Контроль как метод управления финансовой деятельностью бюджетной организации Договор как способ регулирования отношений
Договор как способ регулирования отношений Технология изготовления створки ворот правой 674 кг
Технология изготовления створки ворот правой 674 кг Николай II
Николай II Мастер класс
Мастер класс Презентация на тему Рождество в Германии
Презентация на тему Рождество в Германии По мотивам пермогорской росписи
По мотивам пермогорской росписи 10 класс
10 класс Кластеризацияданныхнечеткимиметодами
Кластеризацияданныхнечеткимиметодами Алкоголь
Алкоголь Военные угрозы национальной безопасности России
Военные угрозы национальной безопасности России Однокоренные (родственные) слова. Корень слова
Однокоренные (родственные) слова. Корень слова Геометрия крыла
Геометрия крыла Физическая культура
Физическая культура ТЕНДЕНЦИИ РАЗВИТИЯ ИНТЕРНЕТ-ПРАВА РОССИИ:НА ЧТО ОБРАТИТЬ ВНИМАНИЕ ВЕНЧУРНОМУ ИНВЕСТОРУ?
ТЕНДЕНЦИИ РАЗВИТИЯ ИНТЕРНЕТ-ПРАВА РОССИИ:НА ЧТО ОБРАТИТЬ ВНИМАНИЕ ВЕНЧУРНОМУ ИНВЕСТОРУ? Турнир по русскому языку
Турнир по русскому языку лекция 1_1 2022
лекция 1_1 2022