- CSP_8968662

Содержание
- 2. What is search for? Assumptions: single agent, deterministic, fully observable, discrete environment Search for planning The
- 3. Constraint satisfaction problems (CSPs) Definition: State is defined by variables Xi with values from domain Di
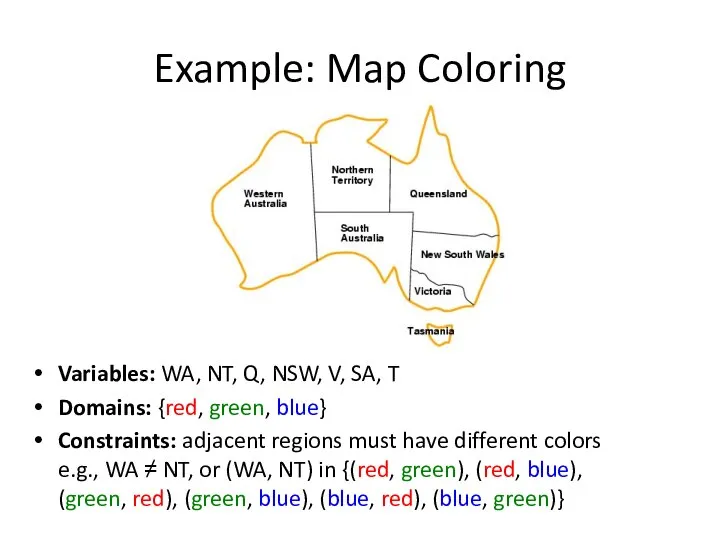
- 4. Example: Map Coloring Variables: WA, NT, Q, NSW, V, SA, T Domains: {red, green, blue} Constraints:
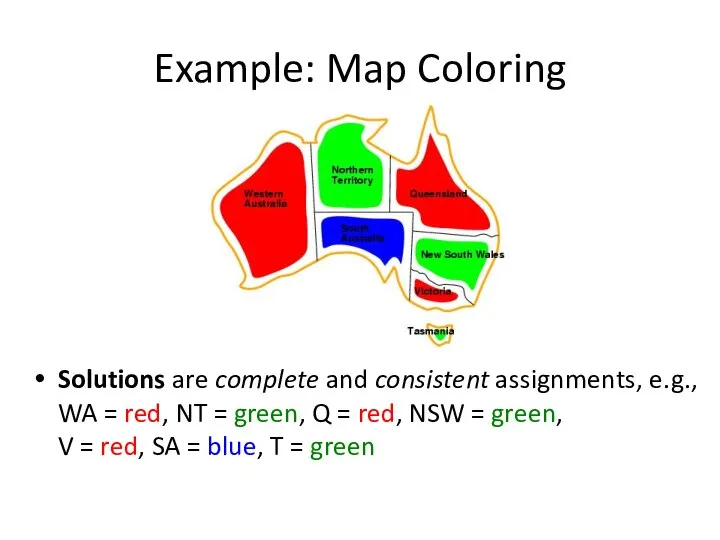
- 5. Example: Map Coloring Solutions are complete and consistent assignments, e.g., WA = red, NT = green,
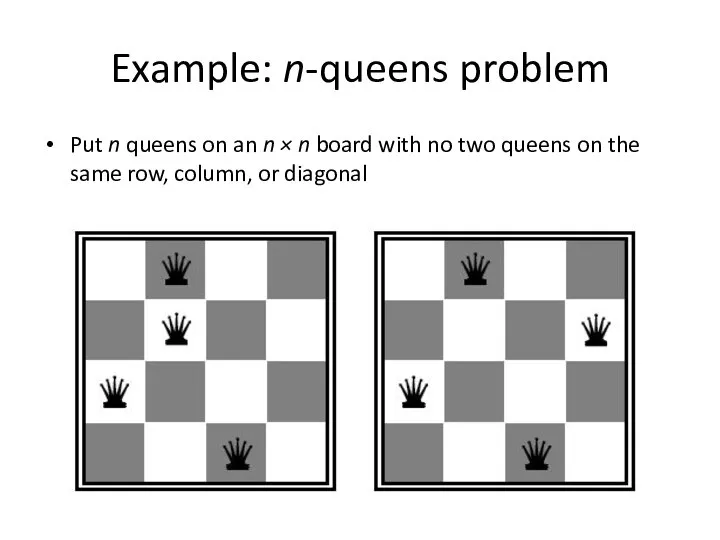
- 6. Example: n-queens problem Put n queens on an n × n board with no two queens
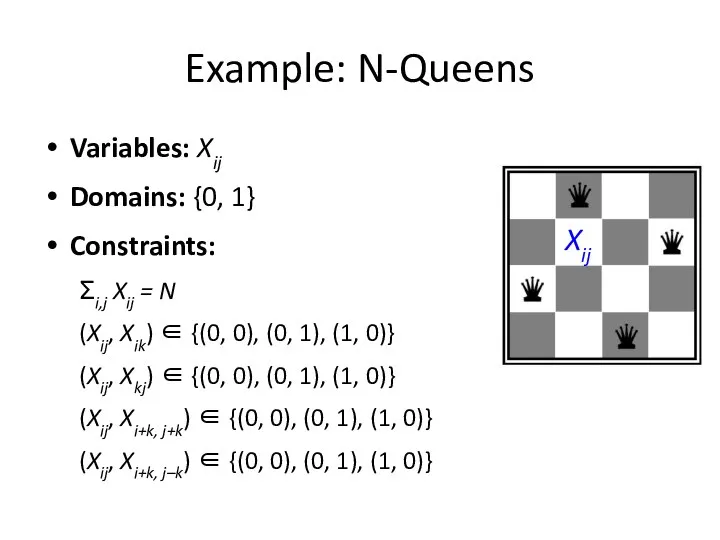
- 7. Example: N-Queens Variables: Xij Domains: {0, 1} Constraints: Σi,j Xij = N (Xij, Xik) ∈ {(0,
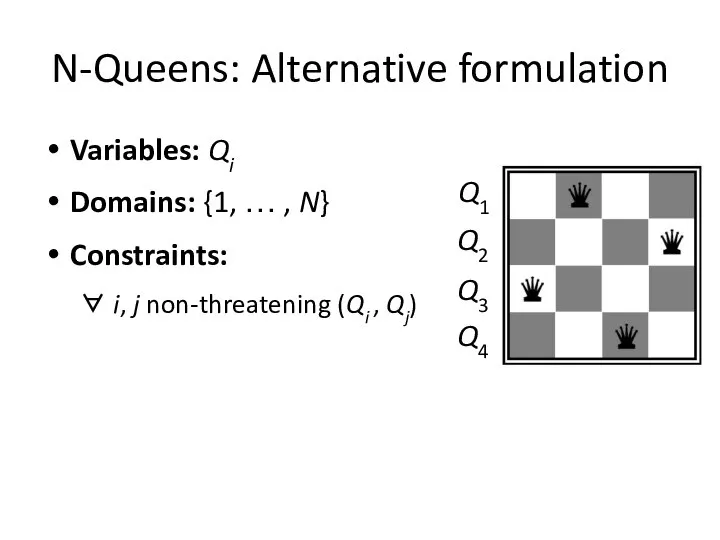
- 8. N-Queens: Alternative formulation Variables: Qi Domains: {1, … , N} Constraints: ∀ i, j non-threatening (Qi
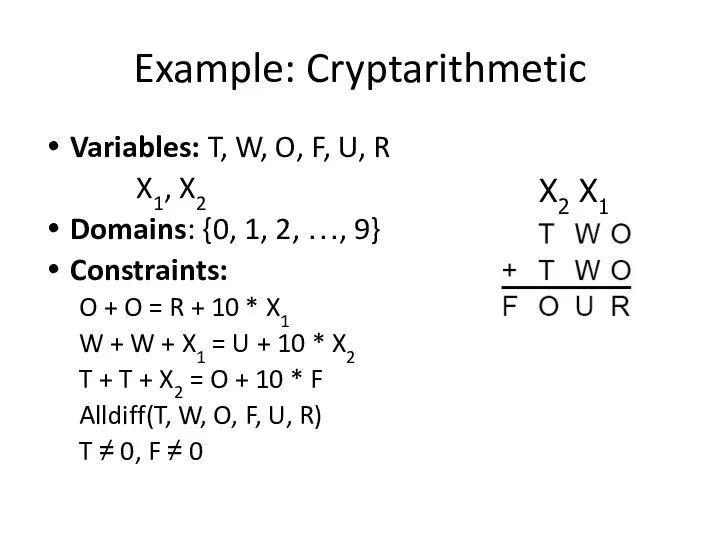
- 9. Example: Cryptarithmetic Variables: T, W, O, F, U, R X1, X2 Domains: {0, 1, 2, …,
- 10. Example: Sudoku Variables: Xij Domains: {1, 2, …, 9} Constraints: Alldiff(Xij in the same unit) Xij
- 11. Real-world CSPs Assignment problems e.g., who teaches what class Timetable problems e.g., which class is offered
- 12. Standard search formulation (incremental) States: Variables and values assigned so far Initial state: The empty assignment
- 13. Standard search formulation (incremental) What is the depth of any solution (assuming n variables)? n (this
- 14. Backtracking search In CSP’s, variable assignments are commutative For example, [WA = red then NT =
- 15. Example
- 16. Example
- 17. Example
- 18. Example
- 19. Backtracking search algorithm Making backtracking search efficient: Which variable should be assigned next? In what order
- 20. Which variable should be assigned next? Most constrained variable: Choose the variable with the fewest legal
- 21. Which variable should be assigned next? Most constrained variable: Choose the variable with the fewest legal
- 22. Which variable should be assigned next? Most constraining variable: Choose the variable that imposes the most
- 23. Which variable should be assigned next? Most constraining variable: Choose the variable that imposes the most
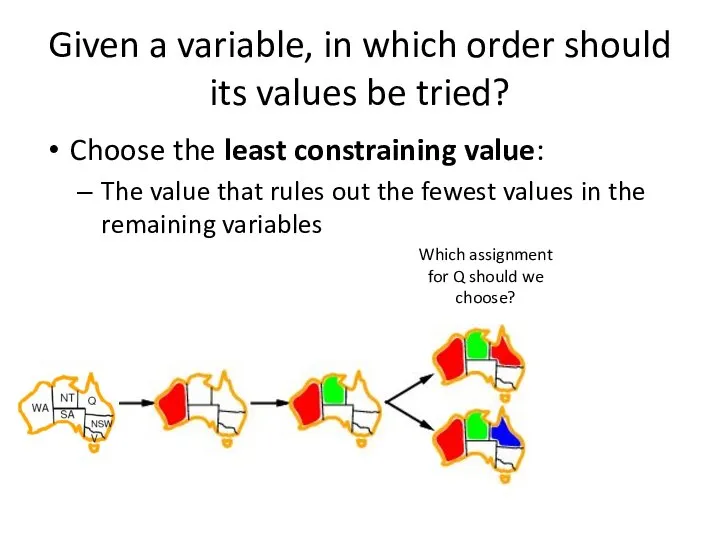
- 24. Given a variable, in which order should its values be tried? Choose the least constraining value:
- 25. Given a variable, in which order should its values be tried? Choose the least constraining value:
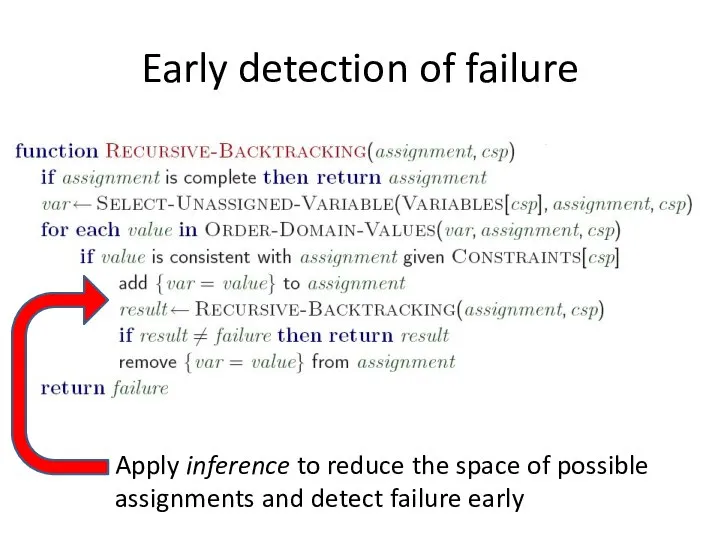
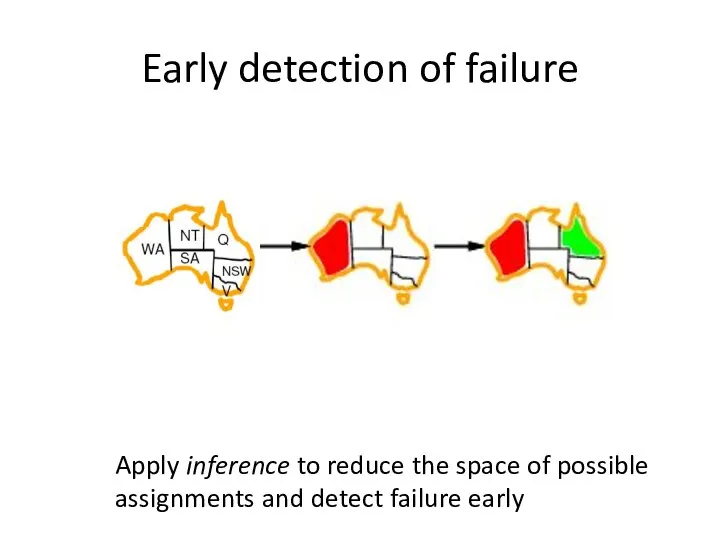
- 26. Early detection of failure Apply inference to reduce the space of possible assignments and detect failure
- 27. Early detection of failure Apply inference to reduce the space of possible assignments and detect failure
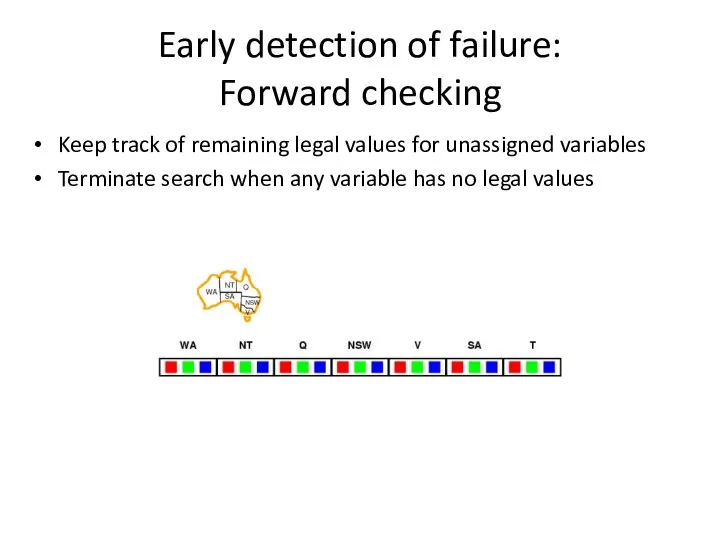
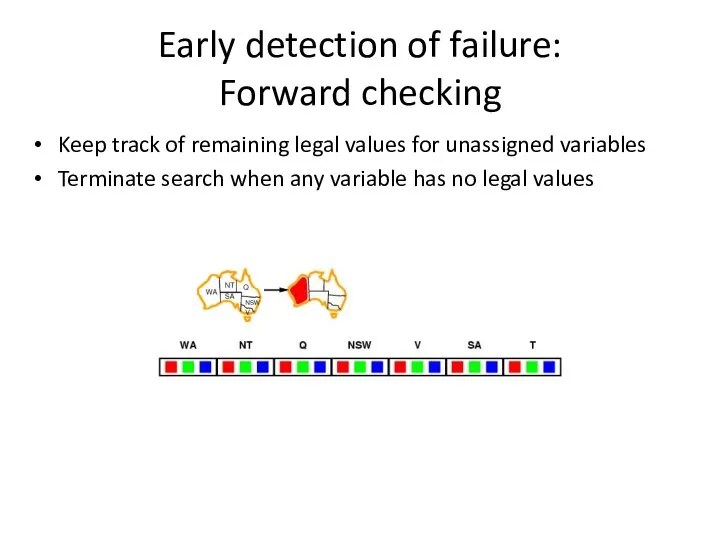
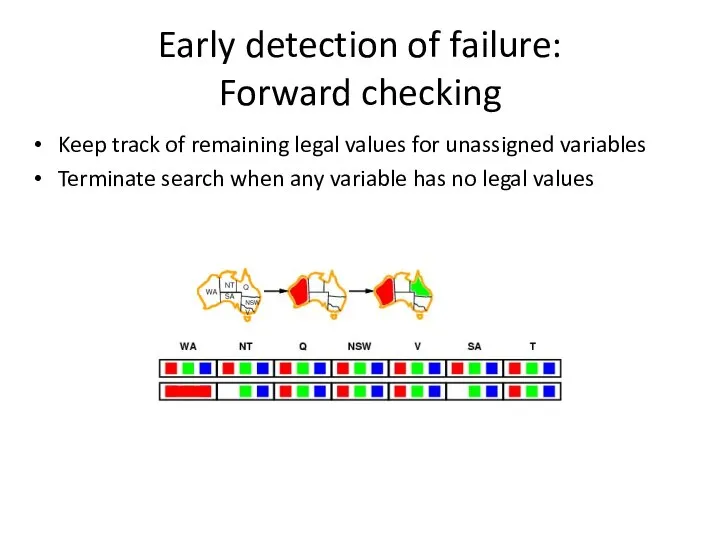
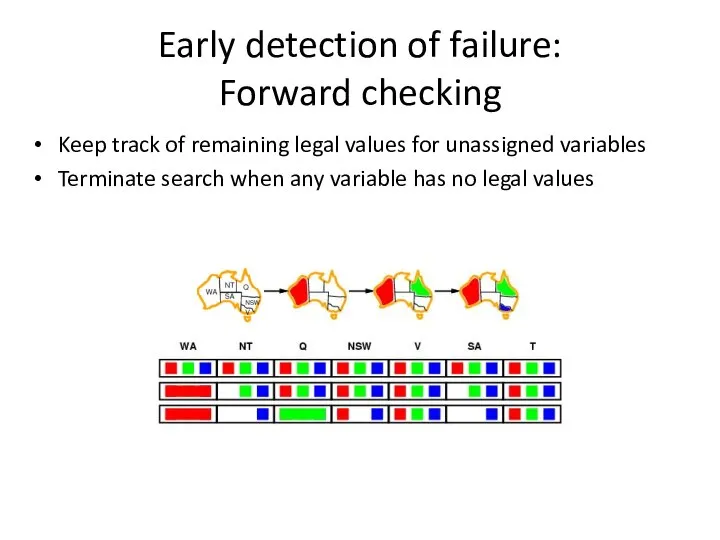
- 28. Early detection of failure: Forward checking Keep track of remaining legal values for unassigned variables Terminate
- 29. Early detection of failure: Forward checking Keep track of remaining legal values for unassigned variables Terminate
- 30. Early detection of failure: Forward checking Keep track of remaining legal values for unassigned variables Terminate
- 31. Early detection of failure: Forward checking Keep track of remaining legal values for unassigned variables Terminate
- 32. Early detection of failure: Forward checking Keep track of remaining legal values for unassigned variables Terminate
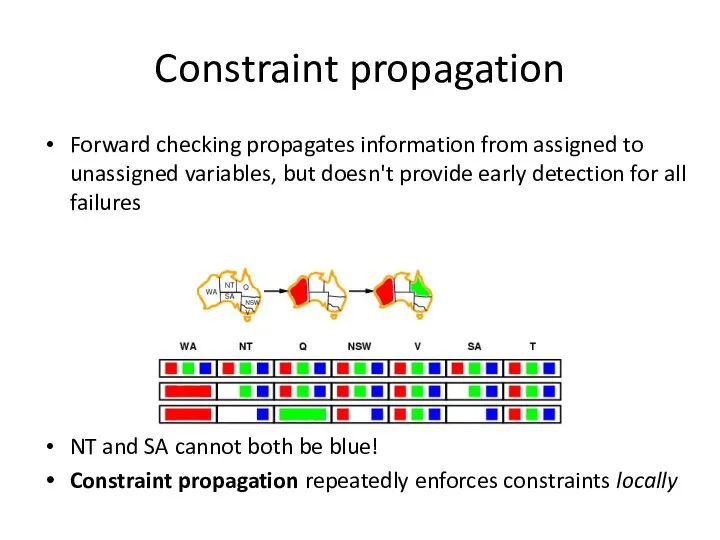
- 33. Constraint propagation Forward checking propagates information from assigned to unassigned variables, but doesn't provide early detection
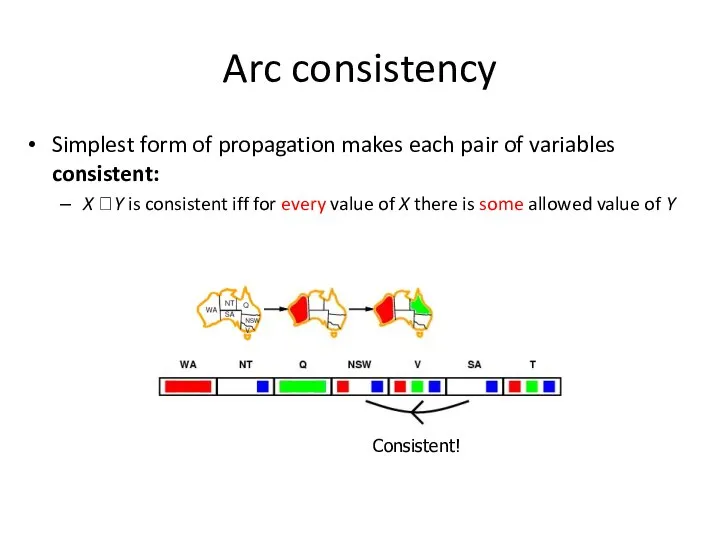
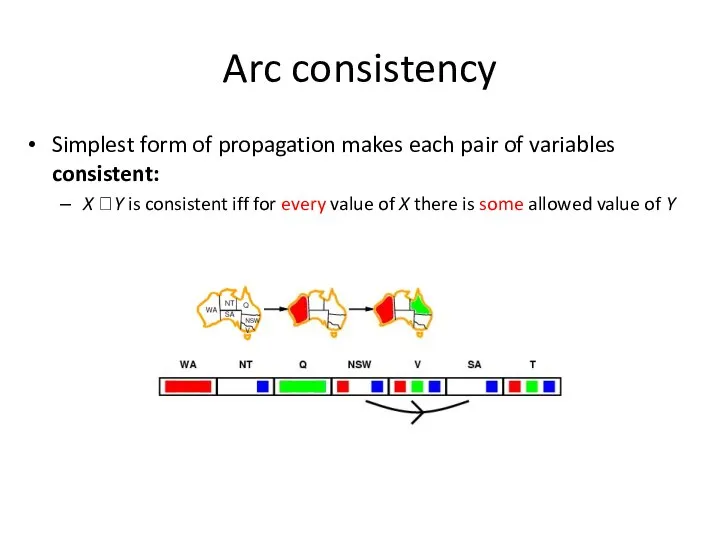
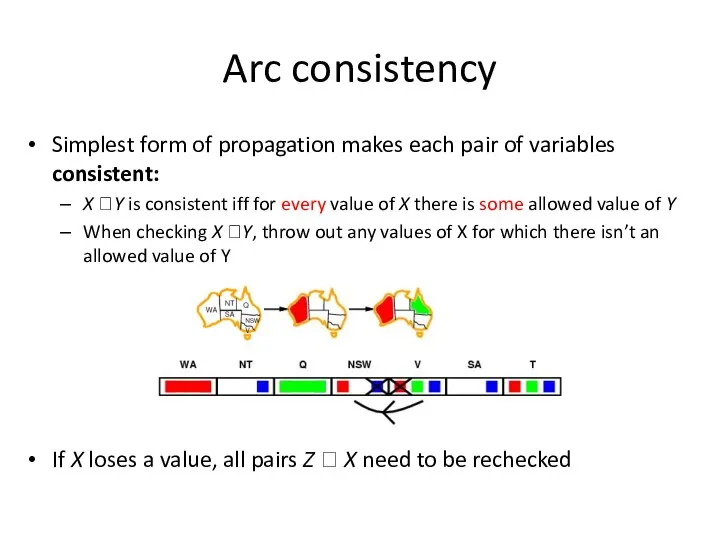
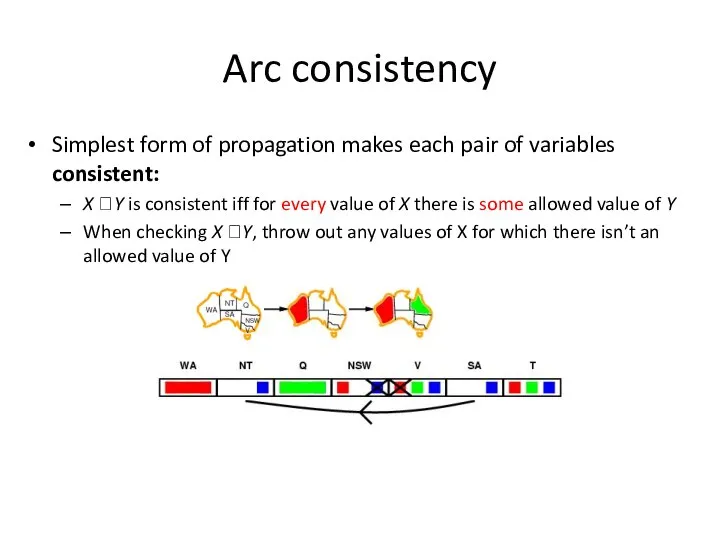
- 34. Simplest form of propagation makes each pair of variables consistent: X ?Y is consistent iff for
- 35. Simplest form of propagation makes each pair of variables consistent: X ?Y is consistent iff for
- 36. Simplest form of propagation makes each pair of variables consistent: X ?Y is consistent iff for
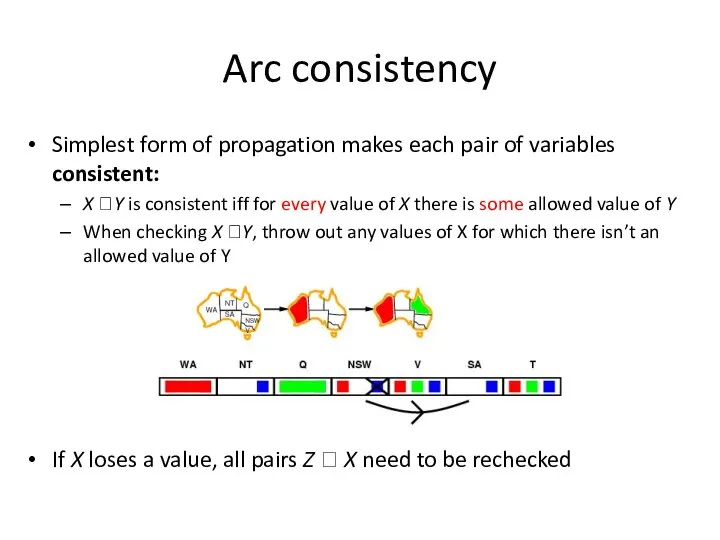
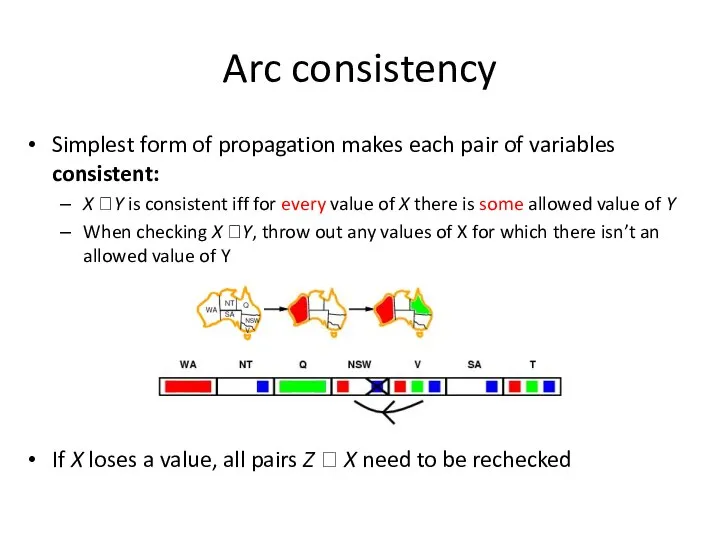
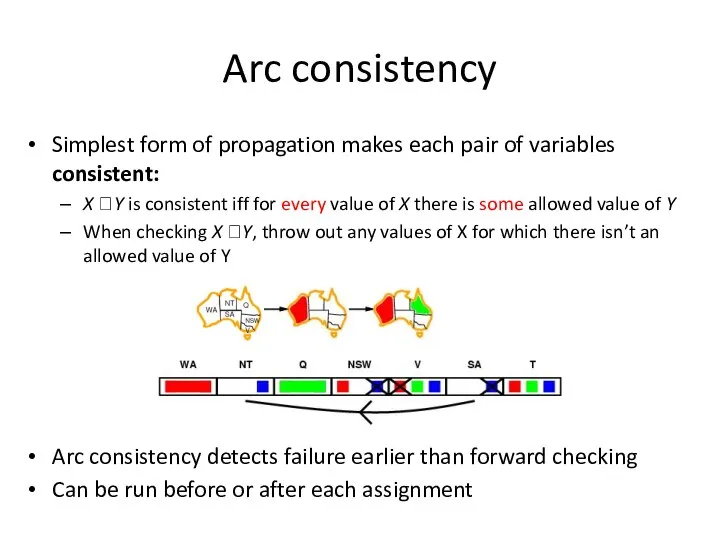
- 37. Arc consistency Simplest form of propagation makes each pair of variables consistent: X ?Y is consistent
- 38. Arc consistency Simplest form of propagation makes each pair of variables consistent: X ?Y is consistent
- 39. Simplest form of propagation makes each pair of variables consistent: X ?Y is consistent iff for
- 40. Simplest form of propagation makes each pair of variables consistent: X ?Y is consistent iff for
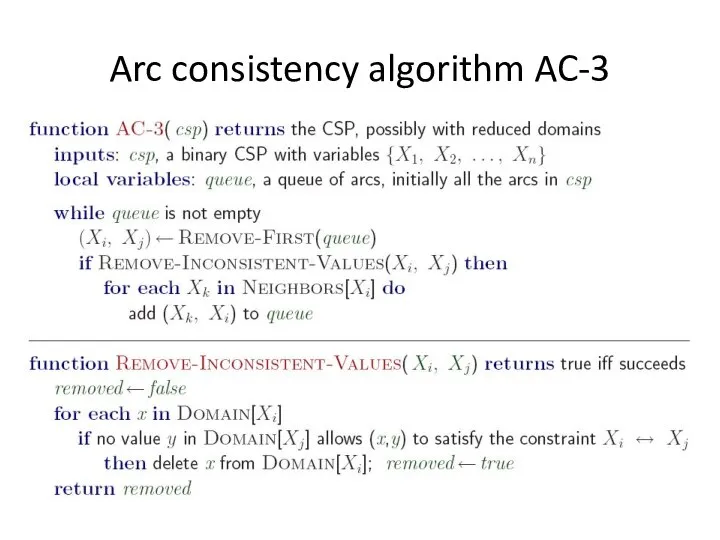
- 41. Arc consistency algorithm AC-3
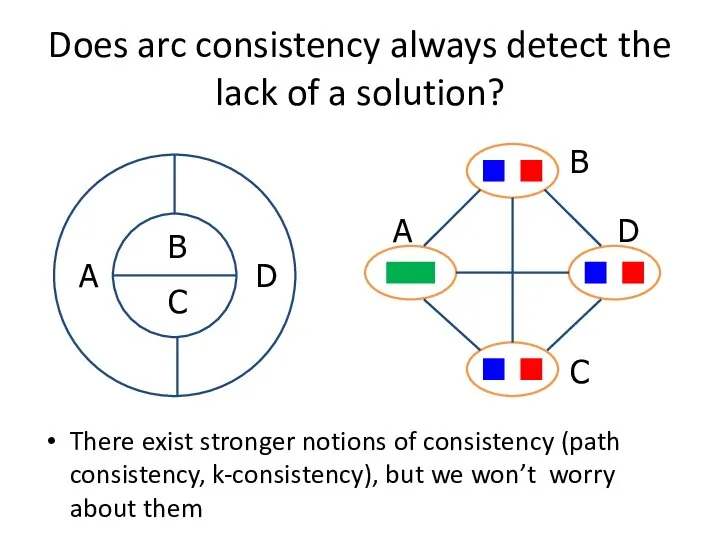
- 42. Does arc consistency always detect the lack of a solution? There exist stronger notions of consistency
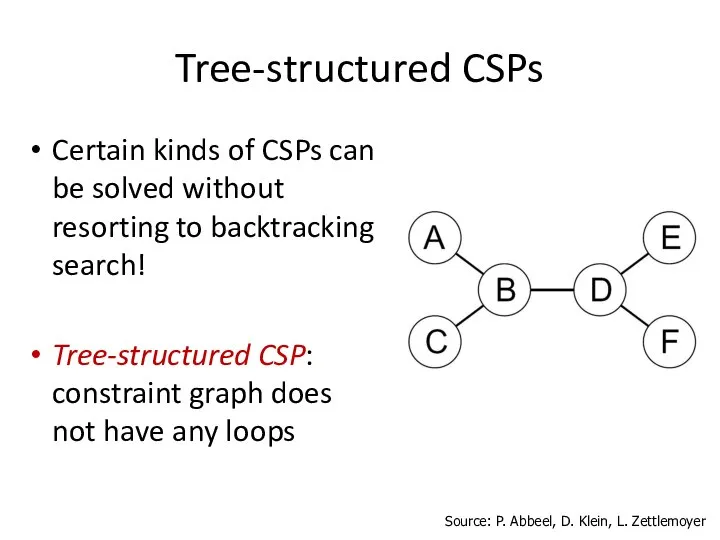
- 43. Tree-structured CSPs Certain kinds of CSPs can be solved without resorting to backtracking search! Tree-structured CSP:
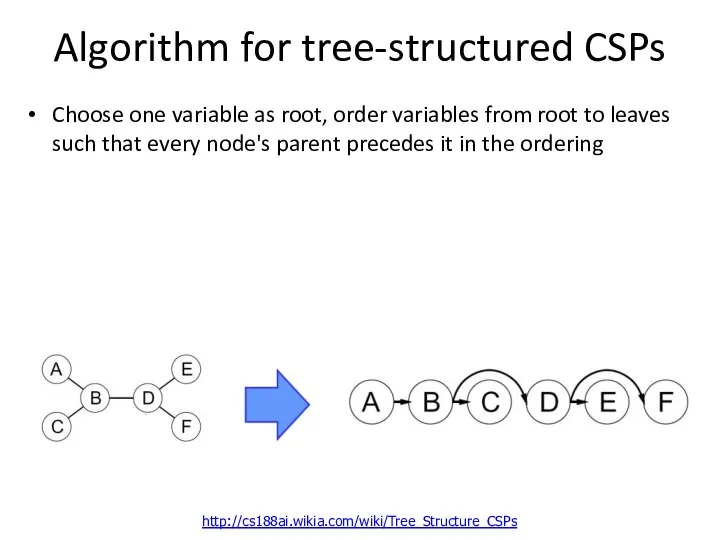
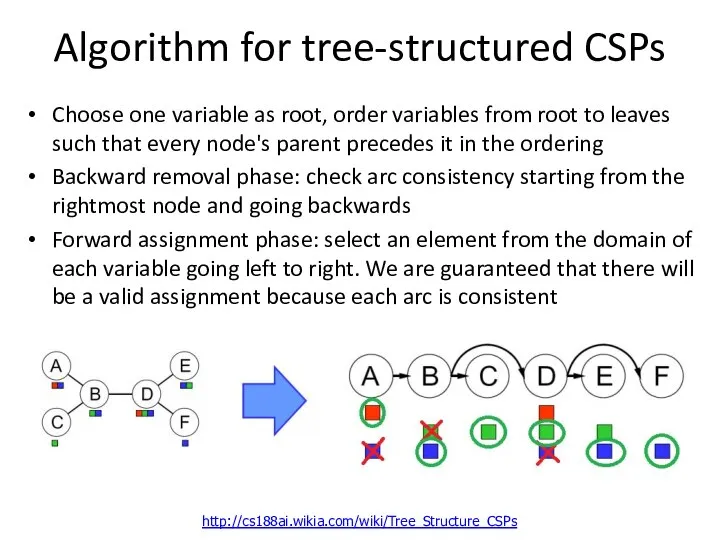
- 44. Algorithm for tree-structured CSPs Choose one variable as root, order variables from root to leaves such
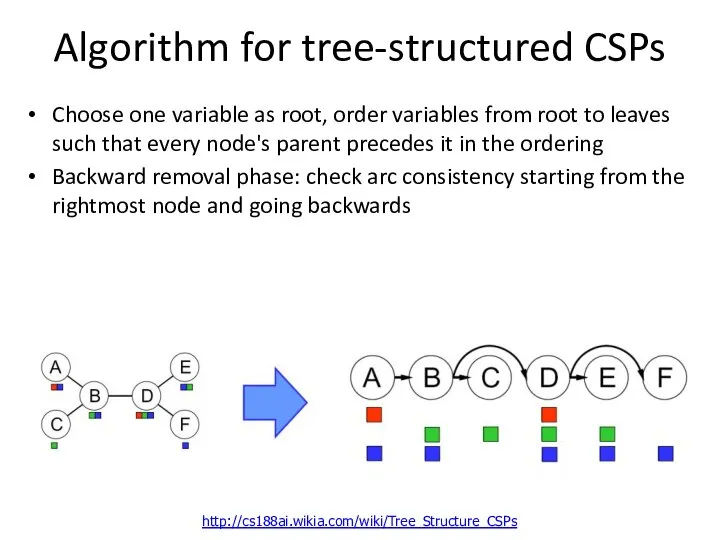
- 45. Algorithm for tree-structured CSPs Choose one variable as root, order variables from root to leaves such
- 46. Algorithm for tree-structured CSPs Choose one variable as root, order variables from root to leaves such
- 47. Algorithm for tree-structured CSPs If n is the numebr of variables and m is the domain
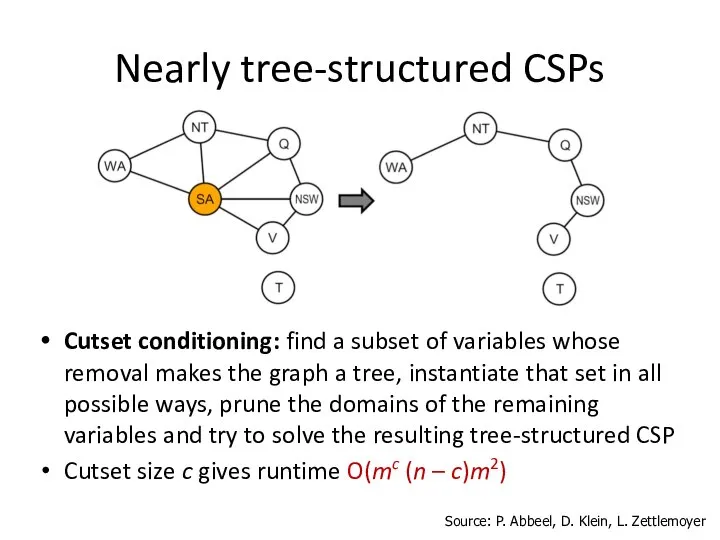
- 48. Nearly tree-structured CSPs Cutset conditioning: find a subset of variables whose removal makes the graph a
- 49. Algorithm for tree-structured CSPs Running time is O(nm2) (n is the number of variables, m is
- 50. Computational complexity of CSPs The satisfiability (SAT) problem: Given a Boolean formula, is there an assignment
- 51. Local search for CSPs Start with “complete” states, i.e., all variables assigned Allow states with unsatisfied
- 52. Local search for CSPs Start with “complete” states, i.e., all variables assigned Allow states with unsatisfied
- 53. Local search for CSPs Start with “complete” states, i.e., all variables assigned Allow states with unsatisfied
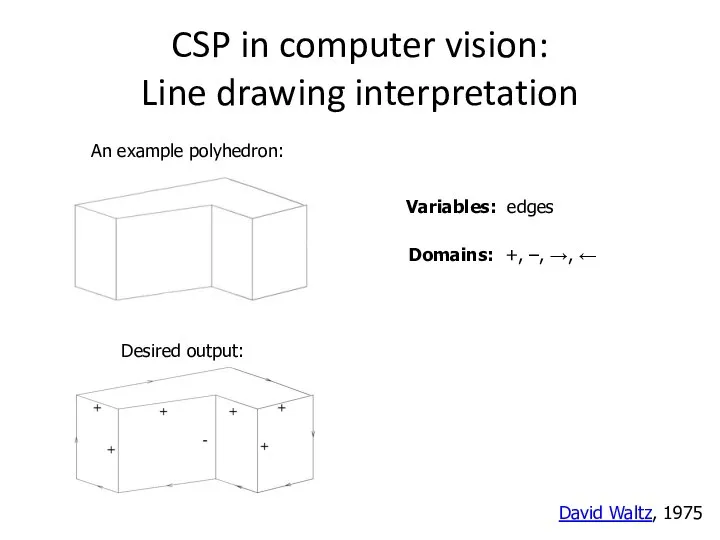
- 54. CSP in computer vision: Line drawing interpretation An example polyhedron: Domains: +, –, →, ← Variables:
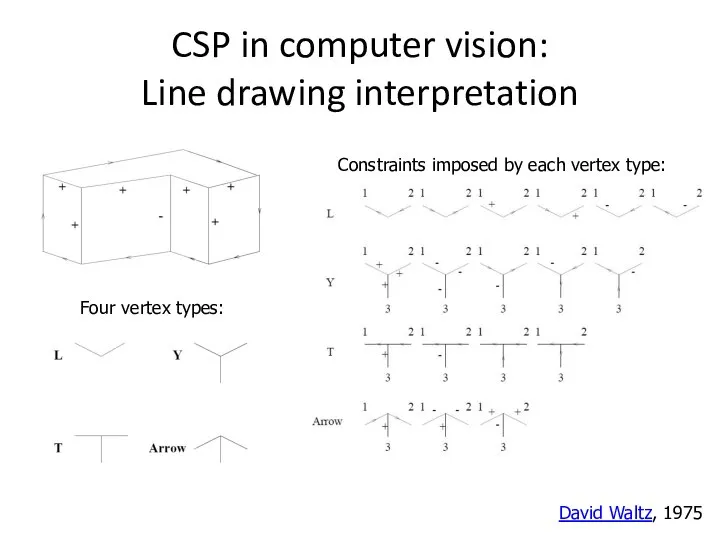
- 55. CSP in computer vision: Line drawing interpretation Four vertex types: Constraints imposed by each vertex type:
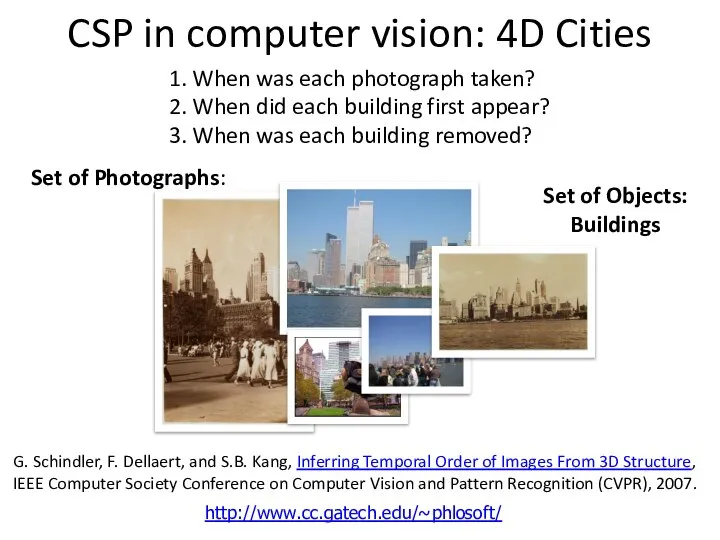
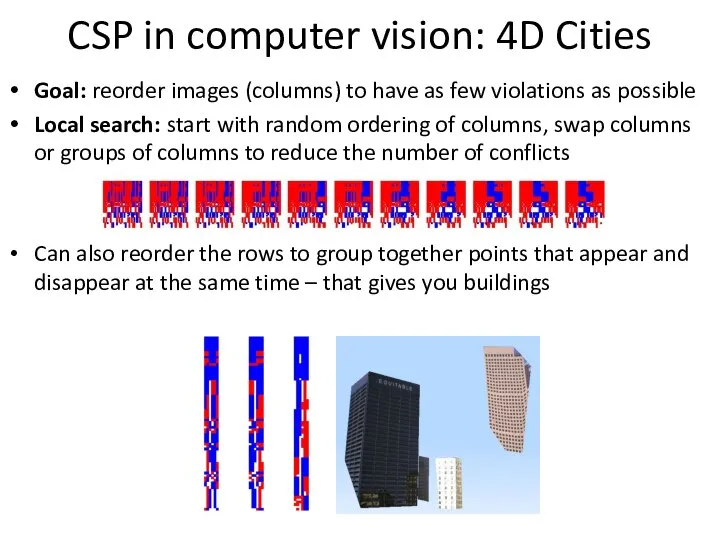
- 56. CSP in computer vision: 4D Cities G. Schindler, F. Dellaert, and S.B. Kang, Inferring Temporal Order
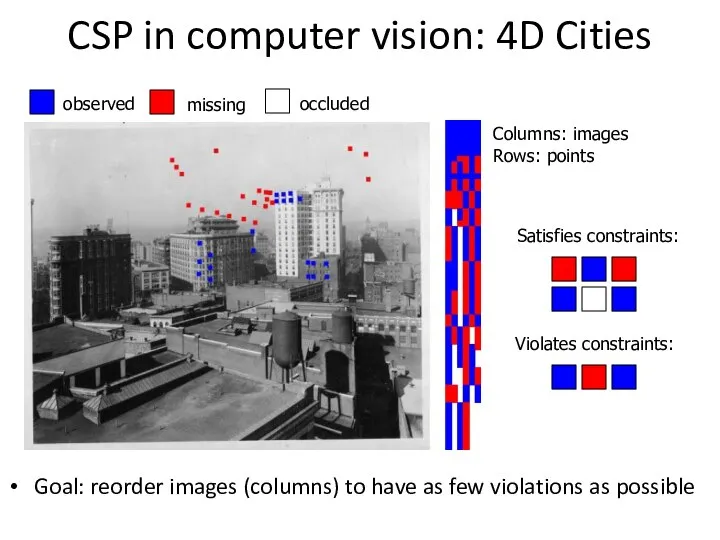
- 57. CSP in computer vision: 4D Cities Goal: reorder images (columns) to have as few violations as
- 58. CSP in computer vision: 4D Cities Goal: reorder images (columns) to have as few violations as
- 60. Скачать презентацию
Слайд 2What is search for?
Assumptions: single agent, deterministic, fully observable, discrete environment
Search for
What is search for?
Assumptions: single agent, deterministic, fully observable, discrete environment
Search for
Слайд 3Constraint satisfaction problems (CSPs)
Definition:
State is defined by variables Xi with values from
Constraint satisfaction problems (CSPs)
Definition:
State is defined by variables Xi with values from
Слайд 4Example: Map Coloring
Variables: WA, NT, Q, NSW, V, SA, T
Domains: {red,
Example: Map Coloring
Variables: WA, NT, Q, NSW, V, SA, T
Domains: {red,
Слайд 5Example: Map Coloring
Solutions are complete and consistent assignments, e.g., WA = red,
Example: Map Coloring
Solutions are complete and consistent assignments, e.g., WA = red,
Слайд 6Example: n-queens problem
Put n queens on an n × n board with
Example: n-queens problem
Put n queens on an n × n board with
Слайд 7Example: N-Queens
Variables: Xij
Domains: {0, 1}
Constraints:
Σi,j Xij = N
(Xij, Xik) ∈ {(0, 0),
Example: N-Queens
Variables: Xij
Domains: {0, 1}
Constraints:
Σi,j Xij = N
(Xij, Xik) ∈ {(0, 0),
Слайд 8N-Queens: Alternative formulation
Variables: Qi
Domains: {1, … , N}
Constraints:
∀ i, j non-threatening (Qi
N-Queens: Alternative formulation
Variables: Qi
Domains: {1, … , N}
Constraints:
∀ i, j non-threatening (Qi
Слайд 9Example: Cryptarithmetic
Variables: T, W, O, F, U, R
X1, X2
Domains: {0, 1,
Example: Cryptarithmetic
Variables: T, W, O, F, U, R
X1, X2
Domains: {0, 1,
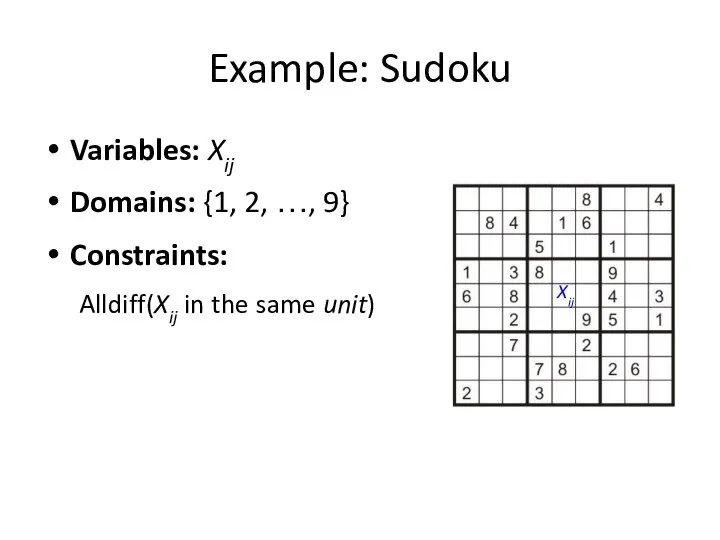
Слайд 10Example: Sudoku
Variables: Xij
Domains: {1, 2, …, 9}
Constraints:
Alldiff(Xij in the same unit)
Xij
Example: Sudoku
Variables: Xij
Domains: {1, 2, …, 9}
Constraints:
Alldiff(Xij in the same unit)
Xij
Слайд 11Real-world CSPs
Assignment problems
e.g., who teaches what class
Timetable problems
e.g., which class is offered
Real-world CSPs
Assignment problems
e.g., who teaches what class
Timetable problems
e.g., which class is offered
Слайд 12Standard search formulation (incremental)
States:
Variables and values assigned so far
Initial state:
The empty
Standard search formulation (incremental)
States:
Variables and values assigned so far
Initial state:
The empty
Слайд 13Standard search formulation (incremental)
What is the depth of any solution (assuming n
Standard search formulation (incremental)
What is the depth of any solution (assuming n
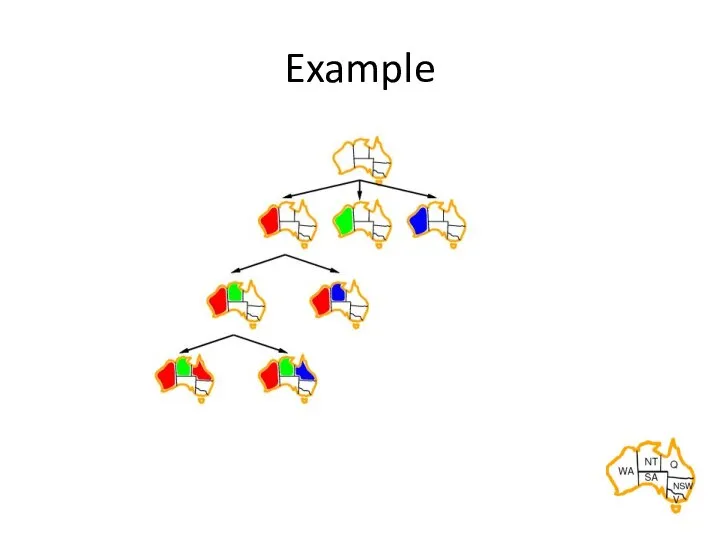
Слайд 14Backtracking search
In CSP’s, variable assignments are commutative
For example, [WA = red then
Backtracking search
In CSP’s, variable assignments are commutative
For example, [WA = red then
Слайд 15Example
Example
Слайд 16Example
Example
Слайд 17Example
Example
Слайд 18Example
Example
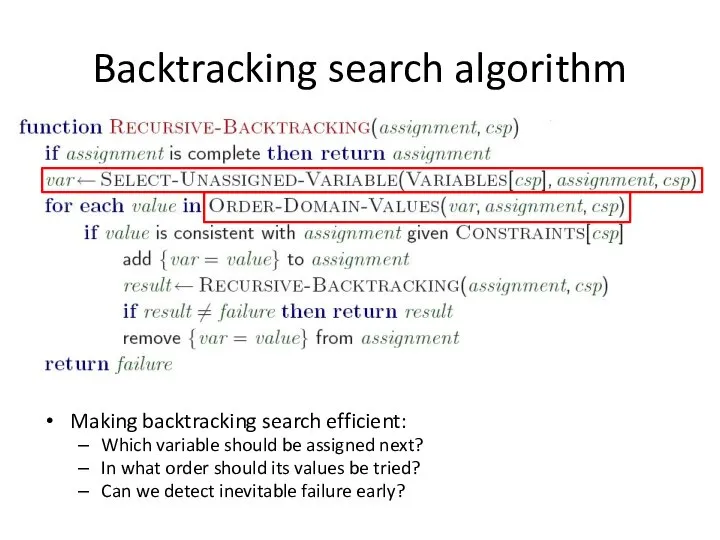
Слайд 19Backtracking search algorithm
Making backtracking search efficient:
Which variable should be assigned next?
In what
Backtracking search algorithm
Making backtracking search efficient:
Which variable should be assigned next?
In what
Слайд 20Which variable should be assigned next?
Most constrained variable:
Choose the variable with the
Which variable should be assigned next?
Most constrained variable:
Choose the variable with the
Слайд 21Which variable should be assigned next?
Most constrained variable:
Choose the variable with the
Which variable should be assigned next?
Most constrained variable:
Choose the variable with the
Слайд 22Which variable should be assigned next?
Most constraining variable:
Choose the variable that imposes
Which variable should be assigned next?
Most constraining variable:
Choose the variable that imposes
Слайд 23Which variable should be assigned next?
Most constraining variable:
Choose the variable that imposes
Which variable should be assigned next?
Most constraining variable:
Choose the variable that imposes
Слайд 24Given a variable, in which order should its values be tried?
Choose the
Given a variable, in which order should its values be tried?
Choose the
Слайд 25Given a variable, in which order should its values be tried?
Choose the
Given a variable, in which order should its values be tried?
Choose the
Слайд 26Early detection of failure
Apply inference to reduce the space of possible assignments
Early detection of failure
Apply inference to reduce the space of possible assignments
Слайд 27Early detection of failure
Apply inference to reduce the space of possible assignments
Early detection of failure
Apply inference to reduce the space of possible assignments
Слайд 28Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Слайд 29Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Слайд 30Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Слайд 31Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Слайд 32Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Early detection of failure:
Forward checking
Keep track of remaining legal values for unassigned
Слайд 33Constraint propagation
Forward checking propagates information from assigned to unassigned variables, but doesn't
Constraint propagation
Forward checking propagates information from assigned to unassigned variables, but doesn't
Слайд 34Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Слайд 35Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Слайд 36Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Слайд 37Arc consistency
Simplest form of propagation makes each pair of variables consistent:
X ?Y
Arc consistency
Simplest form of propagation makes each pair of variables consistent:
X ?Y
Слайд 38Arc consistency
Simplest form of propagation makes each pair of variables consistent:
X ?Y
Arc consistency
Simplest form of propagation makes each pair of variables consistent:
X ?Y
Слайд 39Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Слайд 40Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Simplest form of propagation makes each pair of variables consistent:
X ?Y is
Слайд 41Arc consistency algorithm AC-3
Arc consistency algorithm AC-3
Слайд 42Does arc consistency always detect the lack of a solution?
There exist stronger
Does arc consistency always detect the lack of a solution?
There exist stronger
Слайд 43Tree-structured CSPs
Certain kinds of CSPs can be solved without resorting to backtracking
Tree-structured CSPs
Certain kinds of CSPs can be solved without resorting to backtracking
Слайд 44Algorithm for tree-structured CSPs
Choose one variable as root, order variables from root
Algorithm for tree-structured CSPs
Choose one variable as root, order variables from root
Слайд 45Algorithm for tree-structured CSPs
Choose one variable as root, order variables from root
Algorithm for tree-structured CSPs
Choose one variable as root, order variables from root
Слайд 46Algorithm for tree-structured CSPs
Choose one variable as root, order variables from root
Algorithm for tree-structured CSPs
Choose one variable as root, order variables from root
Слайд 47Algorithm for tree-structured CSPs
If n is the numebr of variables and m
Algorithm for tree-structured CSPs
If n is the numebr of variables and m
Слайд 48Nearly tree-structured CSPs
Cutset conditioning: find a subset of variables whose removal makes
Nearly tree-structured CSPs
Cutset conditioning: find a subset of variables whose removal makes
Слайд 49Algorithm for tree-structured CSPs
Running time is O(nm2)
(n is the number of
Algorithm for tree-structured CSPs
Running time is O(nm2) (n is the number of
Слайд 50Computational complexity of CSPs
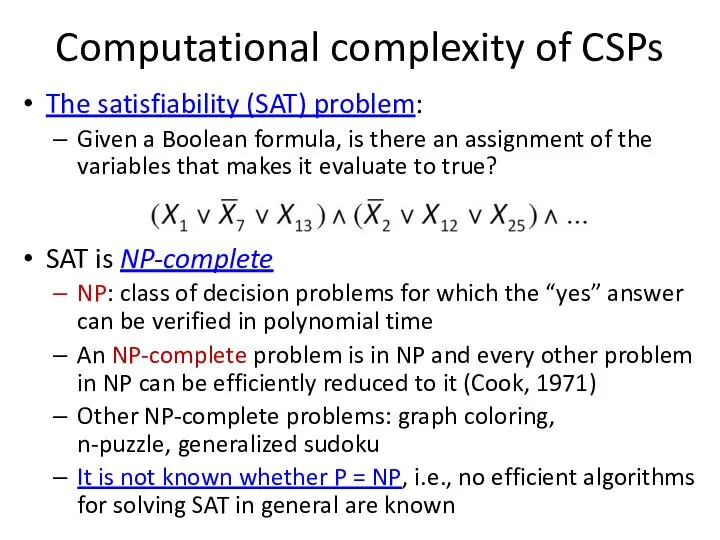
The satisfiability (SAT) problem:
Given a Boolean formula, is there
Computational complexity of CSPs
The satisfiability (SAT) problem:
Given a Boolean formula, is there
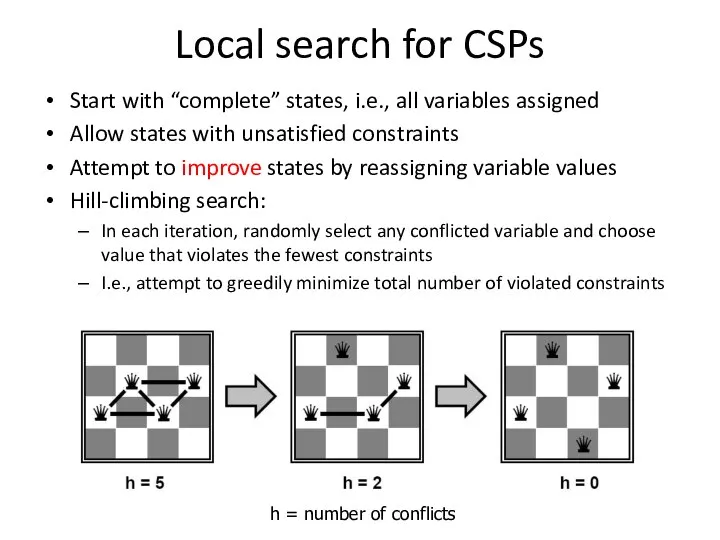
Слайд 51Local search for CSPs
Start with “complete” states, i.e., all variables assigned
Allow
Local search for CSPs
Start with “complete” states, i.e., all variables assigned
Allow
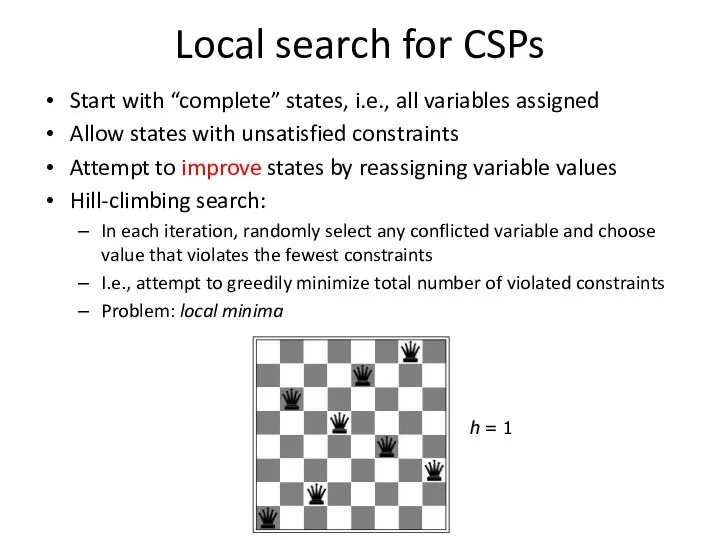
Слайд 52Local search for CSPs
Start with “complete” states, i.e., all variables assigned
Allow
Local search for CSPs
Start with “complete” states, i.e., all variables assigned
Allow
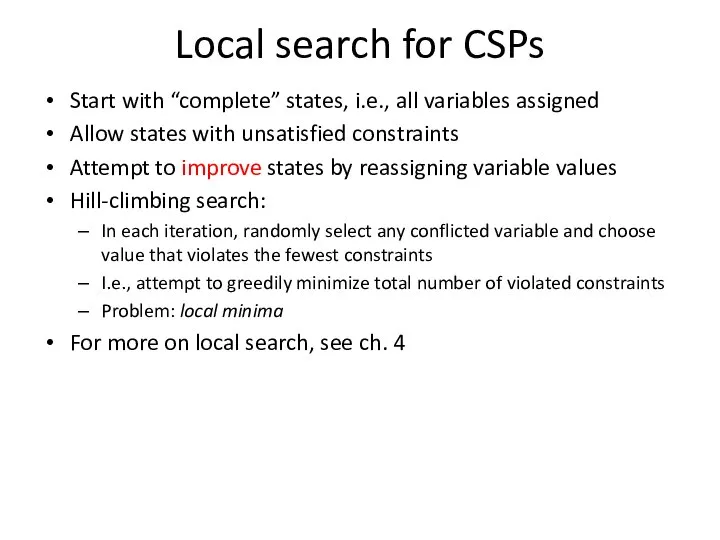
Слайд 53Local search for CSPs
Start with “complete” states, i.e., all variables assigned
Allow
Local search for CSPs
Start with “complete” states, i.e., all variables assigned
Allow
Слайд 54CSP in computer vision:
Line drawing interpretation
An example polyhedron:
Domains: +, –, →, ←
CSP in computer vision:
Line drawing interpretation
An example polyhedron:
Domains: +, –, →, ←
Слайд 55CSP in computer vision:
Line drawing interpretation
Four vertex types:
Constraints imposed by each vertex
CSP in computer vision:
Line drawing interpretation
Four vertex types:
Constraints imposed by each vertex
Слайд 56CSP in computer vision: 4D Cities
G. Schindler, F. Dellaert, and S.B. Kang,
CSP in computer vision: 4D Cities
G. Schindler, F. Dellaert, and S.B. Kang,
Слайд 57CSP in computer vision: 4D Cities
Goal: reorder images (columns) to have as
CSP in computer vision: 4D Cities
Goal: reorder images (columns) to have as
Слайд 58CSP in computer vision: 4D Cities
Goal: reorder images (columns) to have as
CSP in computer vision: 4D Cities
Goal: reorder images (columns) to have as
 Абсентеизм
Абсентеизм Формальное исполнение алгоритма
Формальное исполнение алгоритма Региональный Фестиваль-конкурс
Региональный Фестиваль-конкурс Способы получения искусственного холода
Способы получения искусственного холода Презентация на тему Урок Познания мира "Казахстан - страна высокоразвитой культуры"
Презентация на тему Урок Познания мира "Казахстан - страна высокоразвитой культуры" Координация Система лучшая
Координация Система лучшая Цветочные девы и Портрет девушки
Цветочные девы и Портрет девушки Презентация на тему Правильные многогранники и их построение
Презентация на тему Правильные многогранники и их построение Транспорт
Транспорт Лаборатория преобразовательной техники им. К.А. Круга
Лаборатория преобразовательной техники им. К.А. Круга Magnivico. Система диагностики производства искусственным интеллектом
Magnivico. Система диагностики производства искусственным интеллектом ПАРК ПОБЕДЫ
ПАРК ПОБЕДЫ Министерство информатизации и связи Удмуртской Республики
Министерство информатизации и связи Удмуртской Республики Антропологическая лествица образовательных целей и результатов
Антропологическая лествица образовательных целей и результатов ПРОЕКТ« Виртуальный музей школы»Экспозиция «Памятники архитектуры Белгородчины»
ПРОЕКТ« Виртуальный музей школы»Экспозиция «Памятники архитектуры Белгородчины» Организация добровольческого служения
Организация добровольческого служения Кузьминки
Кузьминки КОМБИНИРОВАННАЯ УПАКОВКА 1
КОМБИНИРОВАННАЯ УПАКОВКА 1 Классификация, характеристика и устройство портов
Классификация, характеристика и устройство портов Знаки препинания при однородных членах предложения. Что такое союзы?
Знаки препинания при однородных членах предложения. Что такое союзы? Здоровым быть модно
Здоровым быть модно ПРОИЗВОДСТВЕННЫЕ АВАРИИ
ПРОИЗВОДСТВЕННЫЕ АВАРИИ Вовлечение местного населения в развитие туризма в Катунском биосферном заповеднике как способ адаптации местных сообществ к кли
Вовлечение местного населения в развитие туризма в Катунском биосферном заповеднике как способ адаптации местных сообществ к кли Прием граждан. Материнство и детство
Прием граждан. Материнство и детство Государственное бюджетное образовательное учреждение среднего профессионального образования «Эльхотовский аграрный техникум»
Государственное бюджетное образовательное учреждение среднего профессионального образования «Эльхотовский аграрный техникум» Введение в логистику
Введение в логистику Реформация и контрреформация в Европе XVI в
Реформация и контрреформация в Европе XVI в Судебные прецеденты и практика международных трибуналов в системе МУП
Судебные прецеденты и практика международных трибуналов в системе МУП