- ДАТЧИКИ РОБОТОВ

Содержание
- 2. Что такое датчики? Датчики – это органы чувств робота. Они помогают роботу воспринимать различные воздействия окружающей
- 3. Тема лекции Мы обсудим самые простые и распространённые датчики: света и касания. По своему принципу действия
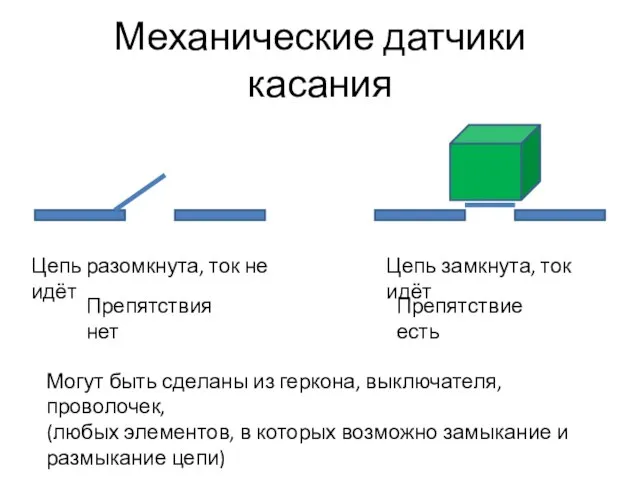
- 4. Механические датчики касания Препятствие есть Препятствия нет Цепь разомкнута, ток не идёт Цепь замкнута, ток идёт
- 5. Механические датчики Преимущества: Лёгкость в использовании Дешевизна Недостатки: Обнаруживают только близкие препятствия Проблема дребезга контактов Пример
- 6. Фоторезистор (основа оптического датчика) + - + - На свету сопротивление фоторезистора уменьшается. Значит, ток через
- 7. Оптические датчики Преимущества: Лёгкость в использовании Дешевизна Недостатки: Зависимость от окружающего освещения Примеры в быту: турникеты
- 8. Датчик линии Белая поверхность. Чёрная линия. Свет отражается Свет не отражается Большое сопротивление Маленький ток Маленькое
- 9. Как робот едет по линии? Оба датчика линии находятся над белой поверхностью. На оба двигателя идёт
- 10. Левый датчик линии находится над белой поверхностью. На левый двигатель идёт большой ток. Робот поворачивается вправо.
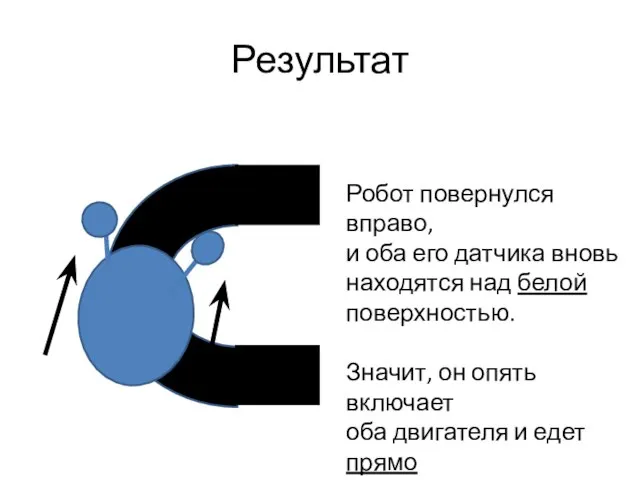
- 11. Результат Робот повернулся вправо, и оба его датчика вновь находятся над белой поверхностью. Значит, он опять
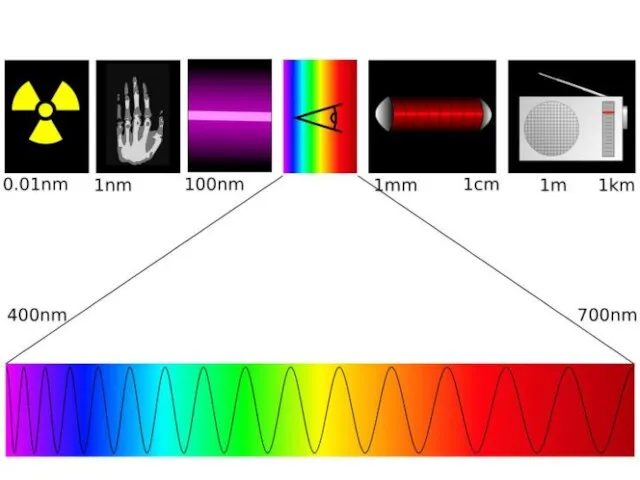
- 12. Фотодатчики Видимый диапазон (оптические датчики) Инфракрасный диапазон (ИК-датчики) Ультрафиолетовый диапазон Лучи света различаются по длине волны.
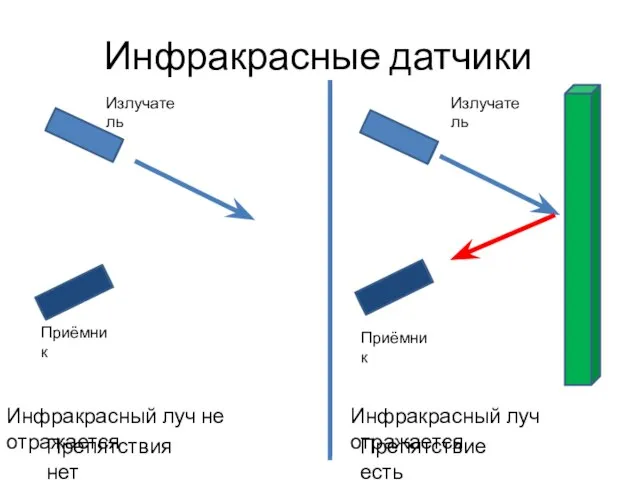
- 14. Инфракрасные датчики Препятствие есть Инфракрасный луч отражается Препятствия нет Инфракрасный луч не отражается Приёмник Приёмник Излучатель
- 15. Инфракрасные датчики Преимущества: Дальность Недостатки: Отражается от стен Примеры из жизни: пульт от телевизора, ИК-порт
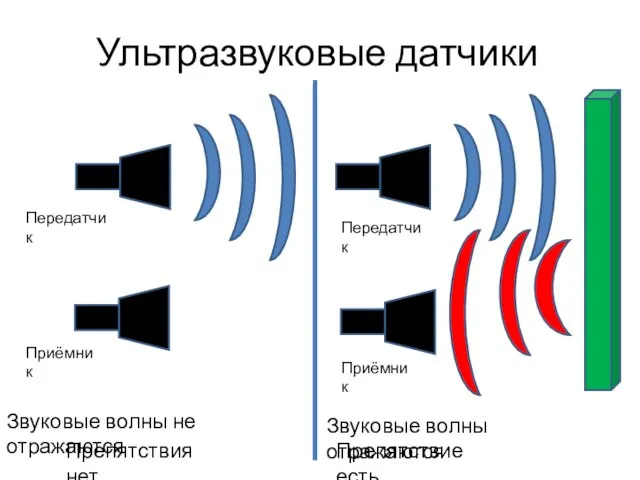
- 16. Ультразвуковые датчики Звуковые волны не отражаются Препятствие есть Звуковые волны отражаются Препятствия нет Приёмник Приёмник Передатчик
- 17. Преимущества: Не зависят от освещения Дальность Недостатки: Сложны в изготовлении Дороговизна Примеры вокруг нас: эхолокаторы, летучие
- 19. Скачать презентацию
Слайд 3Тема лекции
Мы обсудим самые простые и распространённые датчики: света и касания.
Тема лекции
Мы обсудим самые простые и распространённые датчики: света и касания.
Слайд 4Механические датчики касания
Препятствие есть
Препятствия нет
Цепь разомкнута, ток не идёт
Цепь замкнута, ток идёт
Могут
Механические датчики касания
Препятствие есть
Препятствия нет
Цепь разомкнута, ток не идёт
Цепь замкнута, ток идёт
Могут
Слайд 5Механические датчики
Преимущества:
Лёгкость в использовании
Дешевизна
Недостатки:
Обнаруживают только близкие препятствия
Проблема дребезга контактов
Пример в робототехнике:
Механические датчики
Преимущества:
Лёгкость в использовании
Дешевизна
Недостатки:
Обнаруживают только близкие препятствия
Проблема дребезга контактов
Пример в робототехнике:
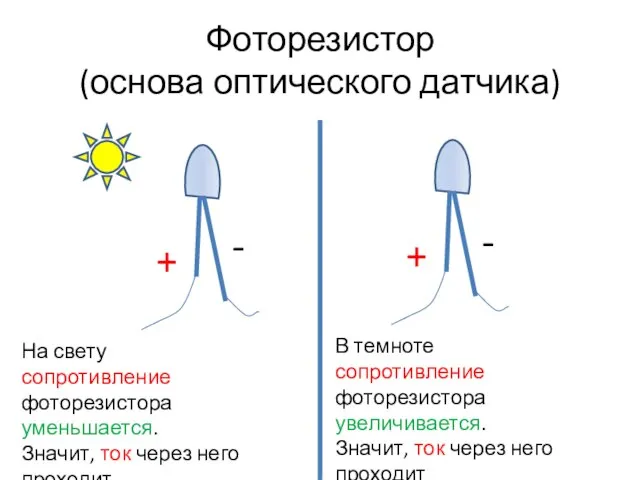
Слайд 6Фоторезистор
(основа оптического датчика)
+
-
+
-
На свету
сопротивление фоторезистора
уменьшается.
Значит, ток через него проходит
сильный.
В темноте
сопротивление
Фоторезистор
(основа оптического датчика)
+
-
+
-
На свету
сопротивление фоторезистора
уменьшается.
Значит, ток через него проходит
сильный.
В темноте
сопротивление
Слайд 7Оптические датчики
Преимущества:
Лёгкость в использовании
Дешевизна
Недостатки:
Зависимость от окружающего освещения
Примеры в быту: турникеты в метро,
Оптические датчики
Преимущества:
Лёгкость в использовании
Дешевизна
Недостатки:
Зависимость от окружающего освещения
Примеры в быту: турникеты в метро,
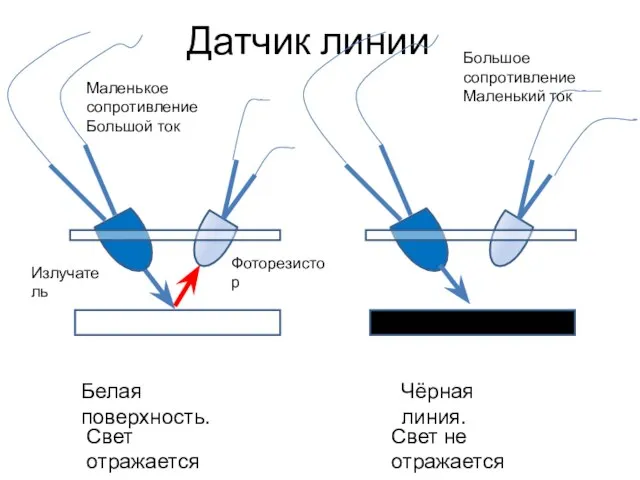
Слайд 8Датчик линии
Белая поверхность.
Чёрная линия.
Свет отражается
Свет не отражается
Большое сопротивление
Маленький ток
Маленькое сопротивление
Большой ток
Излучатель
Фоторезистор
Датчик линии
Белая поверхность.
Чёрная линия.
Свет отражается
Свет не отражается
Большое сопротивление
Маленький ток
Маленькое сопротивление
Большой ток
Излучатель
Фоторезистор
Слайд 9Как робот едет по линии?
Оба датчика линии
находятся над белой
поверхностью.
На оба
Как робот едет по линии?
Оба датчика линии
находятся над белой
поверхностью.
На оба

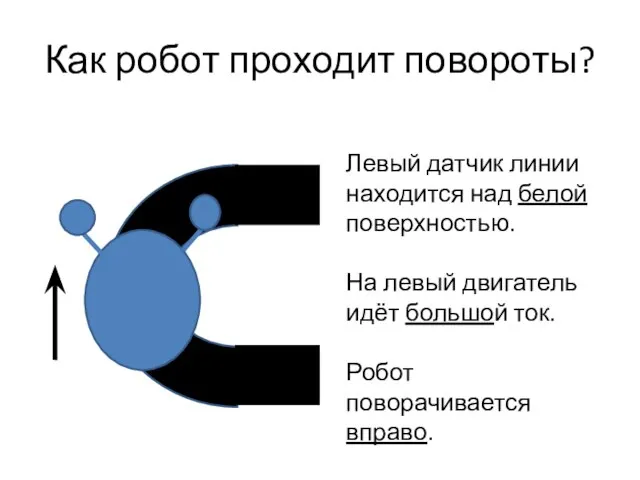
Слайд 10Левый датчик линии
находится над белой
поверхностью.
На левый двигатель
идёт большой ток.
Робот
Левый датчик линии
находится над белой
поверхностью.
На левый двигатель
идёт большой ток.
Робот
Слайд 11Результат
Робот повернулся вправо,
и оба его датчика вновь
находятся над белой
поверхностью.
Значит,
Результат
Робот повернулся вправо,
и оба его датчика вновь
находятся над белой
поверхностью.
Значит,
Слайд 12Фотодатчики
Видимый диапазон
(оптические датчики)
Инфракрасный диапазон
(ИК-датчики)
Ультрафиолетовый диапазон
Лучи света различаются по длине волны.
Инфракрасные волны
Фотодатчики
Видимый диапазон
(оптические датчики)
Инфракрасный диапазон
(ИК-датчики)
Ультрафиолетовый диапазон
Лучи света различаются по длине волны.
Инфракрасные волны

Слайд 14Инфракрасные датчики
Препятствие есть
Инфракрасный луч отражается
Препятствия нет
Инфракрасный луч не отражается
Приёмник
Приёмник
Излучатель
Излучатель
Инфракрасные датчики
Препятствие есть
Инфракрасный луч отражается
Препятствия нет
Инфракрасный луч не отражается
Приёмник
Приёмник
Излучатель
Излучатель
Слайд 15Инфракрасные датчики
Преимущества:
Дальность
Недостатки:
Отражается от стен
Примеры из жизни: пульт от телевизора, ИК-порт
Инфракрасные датчики
Преимущества:
Дальность
Недостатки:
Отражается от стен
Примеры из жизни: пульт от телевизора, ИК-порт
Слайд 16Ультразвуковые датчики
Звуковые волны не отражаются
Препятствие есть
Звуковые волны отражаются
Препятствия нет
Приёмник
Приёмник
Передатчик
Передатчик
Ультразвуковые датчики
Звуковые волны не отражаются
Препятствие есть
Звуковые волны отражаются
Препятствия нет
Приёмник
Приёмник
Передатчик
Передатчик
Слайд 17Преимущества:
Не зависят от освещения
Дальность
Недостатки:
Сложны в изготовлении
Дороговизна
Примеры вокруг нас: эхолокаторы, летучие мыши, парковочные
Преимущества:
Не зависят от освещения
Дальность
Недостатки:
Сложны в изготовлении
Дороговизна
Примеры вокруг нас: эхолокаторы, летучие мыши, парковочные
 Платформа анализа конкурентов и поиска товаров с гарантированными продажами
Платформа анализа конкурентов и поиска товаров с гарантированными продажами Презентация на тему М.Шолохов Судьба человека
Презентация на тему М.Шолохов Судьба человека  Семейство Астровые или Сложноцветные
Семейство Астровые или Сложноцветные Куликовская битва 4 класс - тест
Куликовская битва 4 класс - тест математики в основе число, переменная логики высказывание (логическая переменная)
математики в основе число, переменная логики высказывание (логическая переменная) Физиологические особенности спортивной работы в разных зонах мощности
Физиологические особенности спортивной работы в разных зонах мощности v
v Презентация на тему Падение монархии
Презентация на тему Падение монархии  ВКР: 15-ти этажный жилой многоэтажный дом
ВКР: 15-ти этажный жилой многоэтажный дом Click to edit Master title style Click to edit Master subtitle style
Click to edit Master title style Click to edit Master subtitle style  Итоги Челябинской городской правовой олимпиады «С чего начинается ПРАВО»
Итоги Челябинской городской правовой олимпиады «С чего начинается ПРАВО»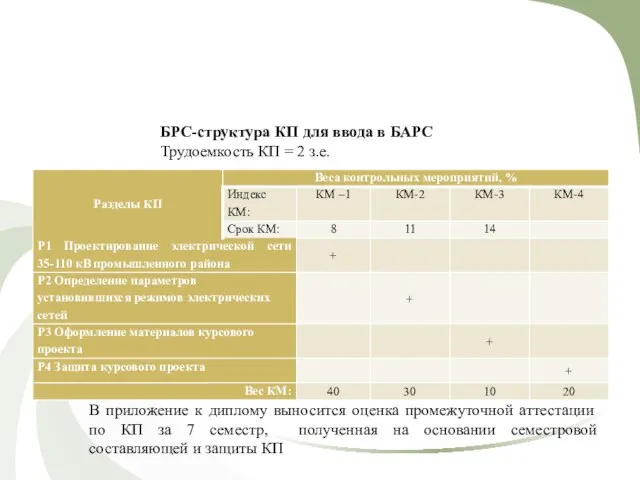 БРС-структура КП для ввода в БАРС
БРС-структура КП для ввода в БАРС Режим труда и отдыха
Режим труда и отдыха Система воспитательной работы школы как сотрудничество и соавторство всех субъектов образовательного процесса
Система воспитательной работы школы как сотрудничество и соавторство всех субъектов образовательного процесса О развитии инфраструктуры поддержки субъектов малого и среднего предпринимательства в Ставропольском крае
О развитии инфраструктуры поддержки субъектов малого и среднего предпринимательства в Ставропольском крае Экологическое страхование и оценка рисков
Экологическое страхование и оценка рисков Телеканал Городской
Телеканал Городской Экологический мониторинг
Экологический мониторинг Мобильные терминалы CASIO
Мобильные терминалы CASIO Дисциплинарная ответственность и ее виды
Дисциплинарная ответственность и ее виды Подготовка к ЕГЭ и предметным олимпиадам
Подготовка к ЕГЭ и предметным олимпиадам Ключевые задачи и компетенции менеджера по инновациям в компании
Ключевые задачи и компетенции менеджера по инновациям в компании Место психологии в системы других наук. Основные отрасли психологии. Волков. Кузнецова. Гафурова. Юсупов
Место психологии в системы других наук. Основные отрасли психологии. Волков. Кузнецова. Гафурова. Юсупов Сертификация. Лекция №3
Сертификация. Лекция №3 Презентация на тему Органы чувств
Презентация на тему Органы чувств  Эллиптическая орбита
Эллиптическая орбита Лакокрасочные покрытия в авторемонтном производстве
Лакокрасочные покрытия в авторемонтном производстве Тема урока: «Сочинение-рассказ по картине В.И. Сурикова «Взятие снежного городка».
Тема урока: «Сочинение-рассказ по картине В.И. Сурикова «Взятие снежного городка».