- Detection of streaks of faint space objects_Berenkov

Содержание
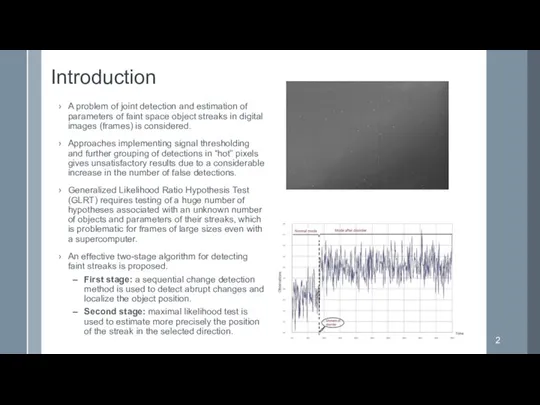
- 2. Introduction A problem of joint detection and estimation of parameters of faint space object streaks in
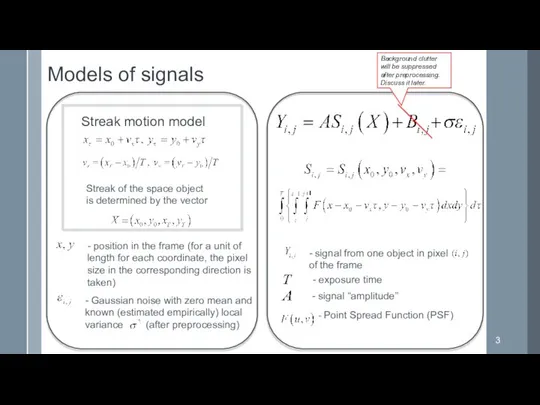
- 3. Models of signals Streak of the space object is determined by the vector Streak motion model
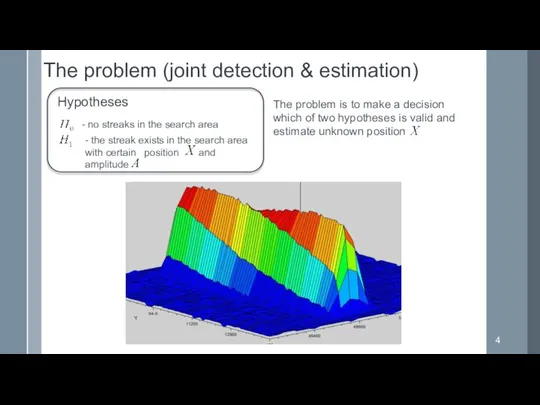
- 4. - no streaks in the search area - the streak exists in the search area with
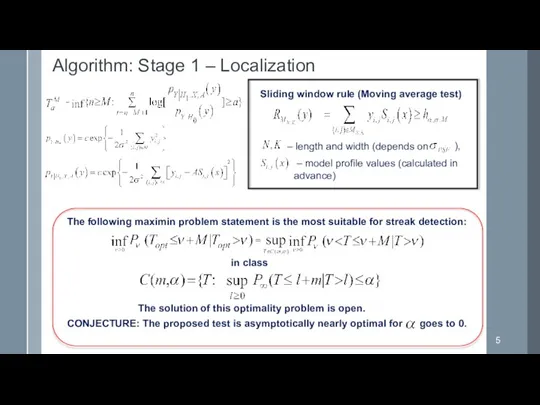
- 5. – model profile values (calculated in advance) Sliding window rule (Moving average test) ), Algorithm: Stage
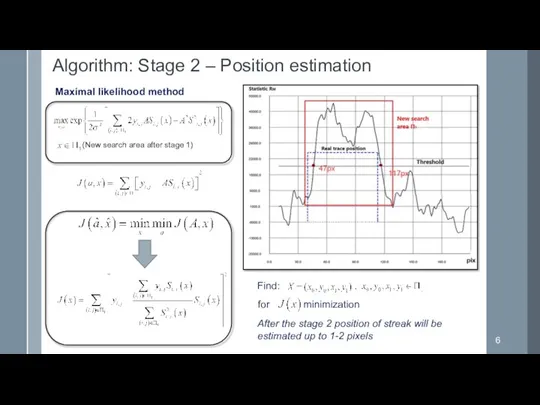
- 6. Maximal likelihood method Find: for minimization (New search area after stage 1) Algorithm: Stage 2 –
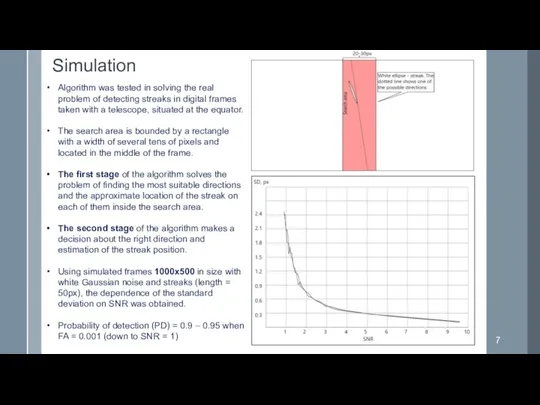
- 7. Simulation Algorithm was tested in solving the real problem of detecting streaks in digital frames taken
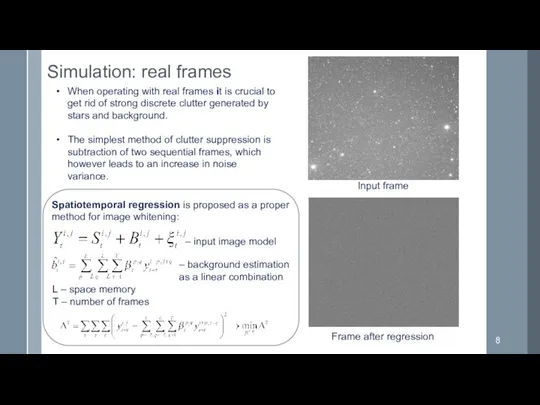
- 8. Simulation: real frames When operating with real frames it is crucial to get rid of strong
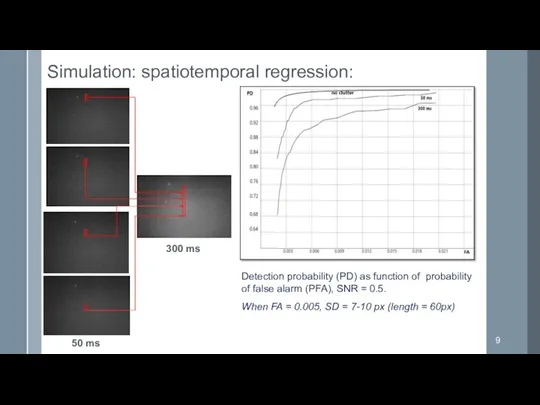
- 9. Simulation: spatiotemporal regression: Detection probability (PD) as function of probability of false alarm (PFA), SNR =
- 10. Conclusion and future work We proposed an effective two-stage algorithm which significantly reduces the number of
- 11. Acknowledgements I am grateful to Alexey E. Kolessa and Alexander G. Tartakovsky for setting the problem,
- 13. Скачать презентацию
Слайд 3Models of signals
Streak of the space object
is determined by the vector
Models of signals
Streak of the space object
is determined by the vector
Слайд 4- no streaks in the search area
- the streak exists in the
- no streaks in the search area
- the streak exists in the
Слайд 5 – model profile values (calculated in advance)
Sliding window rule (Moving average
– model profile values (calculated in advance)
Sliding window rule (Moving average
Слайд 6 Maximal likelihood method
Find:
for minimization
(New search area after stage 1)
Algorithm: Stage
Maximal likelihood method
Find:
for minimization
(New search area after stage 1)
Algorithm: Stage
Слайд 7Simulation
Algorithm was tested in solving the real problem of detecting streaks in
Simulation
Algorithm was tested in solving the real problem of detecting streaks in
Слайд 8Simulation: real frames
When operating with real frames it is crucial to get
Simulation: real frames
When operating with real frames it is crucial to get
Слайд 9Simulation: spatiotemporal regression:
Detection probability (PD) as function of probability of false
Simulation: spatiotemporal regression:
Detection probability (PD) as function of probability of false
Слайд 10Conclusion and future work
We proposed an effective two-stage algorithm which significantly reduces
Conclusion and future work
We proposed an effective two-stage algorithm which significantly reduces
Слайд 11Acknowledgements
I am grateful to Alexey E. Kolessa and Alexander G. Tartakovsky for
Acknowledgements
I am grateful to Alexey E. Kolessa and Alexander G. Tartakovsky for

 Колебательный контур
Колебательный контур Моя будущая профессия учитель
Моя будущая профессия учитель Сладкие блюда
Сладкие блюда Вводный вебинар
Вводный вебинар Родительское собрание "Скоро в школу"
Родительское собрание "Скоро в школу" Кабинет неспешного копирайтинга
Кабинет неспешного копирайтинга Элементы комбинаторики
Элементы комбинаторики Констит.строй 2021
Констит.строй 2021 Позитивные мысли
Позитивные мысли Создание военных блоков, локальные войны и вооруженные конфликты второй половины XX начала XXI веков
Создание военных блоков, локальные войны и вооруженные конфликты второй половины XX начала XXI веков Инновационное развитие машиностроительной промышленности России. Роль ИТ. Вызовы и реалии..
Инновационное развитие машиностроительной промышленности России. Роль ИТ. Вызовы и реалии.. Изменения в написании КР и ДР
Изменения в написании КР и ДР Установка и настройка веб-сервера Apache
Установка и настройка веб-сервера Apache Цветные металлы и сплавы
Цветные металлы и сплавы Развлекательный Комплекс «АКТЕРА»Общая информация
Развлекательный Комплекс «АКТЕРА»Общая информация Проект по английскому языку про Великобританию
Проект по английскому языку про Великобританию Спряжение глаголов в заданиях
Спряжение глаголов в заданиях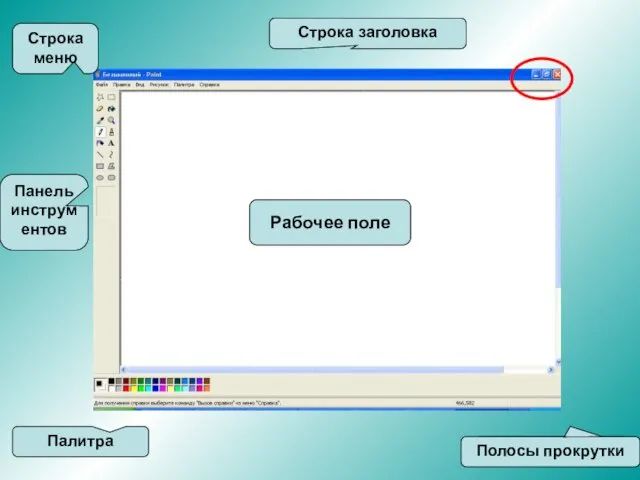 Что такое пиксель. Масштаб изображения
Что такое пиксель. Масштаб изображения Презентация на тему Семейство Папоротниковые
Презентация на тему Семейство Папоротниковые Philosophy
Philosophy  Математика и поэзия
Математика и поэзия Презентация на тему Неопределенный интеграл
Презентация на тему Неопределенный интеграл  Как устроен наш язык
Как устроен наш язык Alternative Energy Sources
Alternative Energy Sources  Анализ результатов ГИА9 классы 2010-2011качество подготовки
Анализ результатов ГИА9 классы 2010-2011качество подготовки Портфолио - профессиональный портрет школьного библиотекаря
Портфолио - профессиональный портрет школьного библиотекаря Как выращивают хлопок
Как выращивают хлопок Полезные для здоровья рецепты разных блюд
Полезные для здоровья рецепты разных блюд