- Динамическая Декомпозиция волновых полей и Реконструкция модели среды при обработке данных ВСП.

Содержание
- 2. Содержание 1. Введение 2. Формулировка задач 3. Описание модели среды 4. Расчет лучей в двумерных градиентных
- 3. 1. Введение Как правило процессы обработки и интерпретации данных сейсморазведки эти процессы разделены во времени и
- 4. 2. Формулировка задач Для применения лучевого метода, являющегося высокочастотным приближением, модель должна удовлетворять ограничениям на максимальную
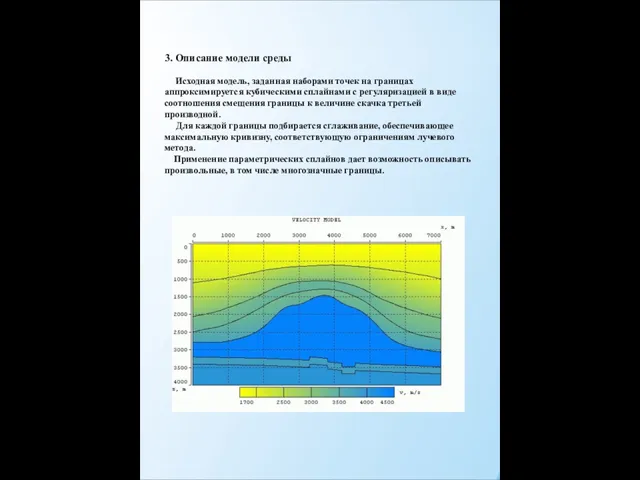
- 5. 3. Описание модели среды Исходная модель, заданная наборами точек на границах аппроксимируется кубическими сплайнами с регуляризацией
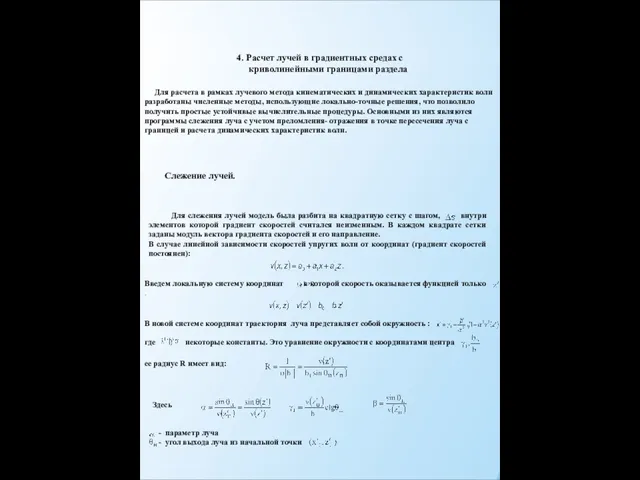
- 6. Для слежения лучей модель была разбита на квадратную сетку с шагом, внутри элементов которой градиент скоростей
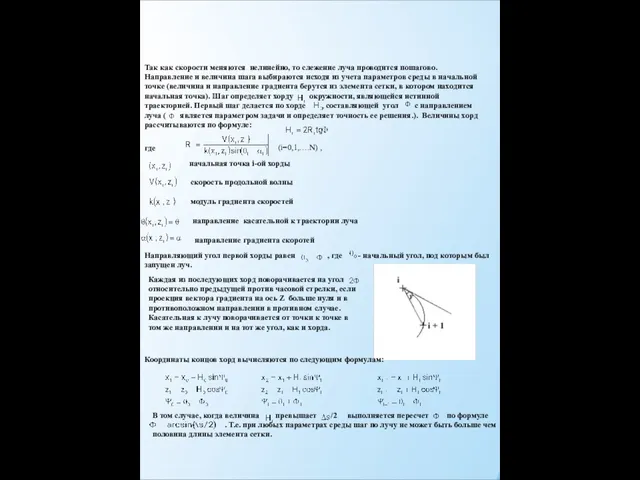
- 7. Так как скорости меняются нелинейно, то слежение луча проводится пошагово. Направление и величина шага выбираются исходя
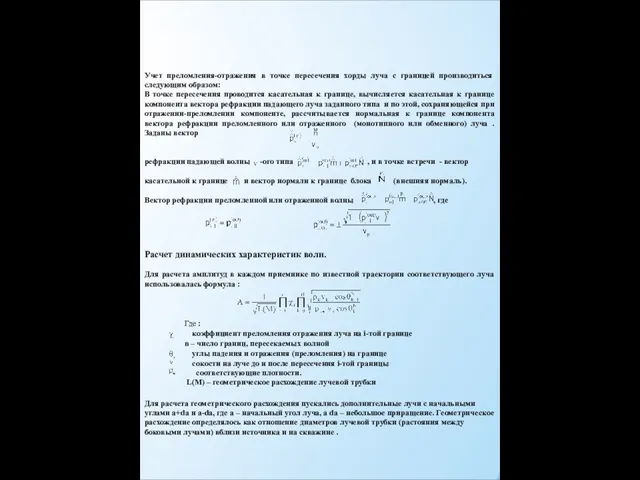
- 8. Учет преломления-отражения в точке пересечения хорды луча с границей производиться следующим образом: В точке пересечения проводится
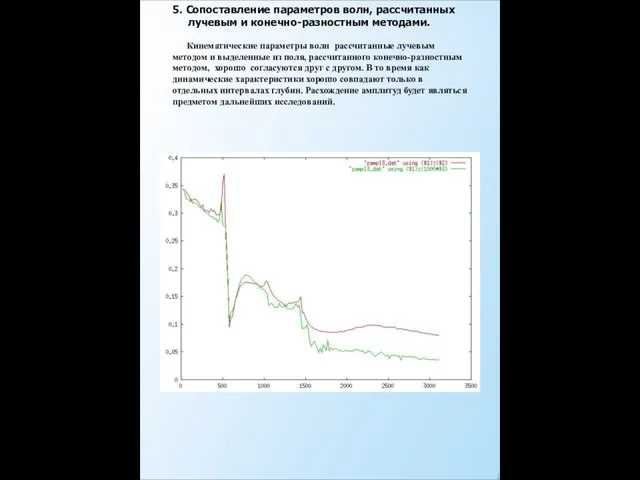
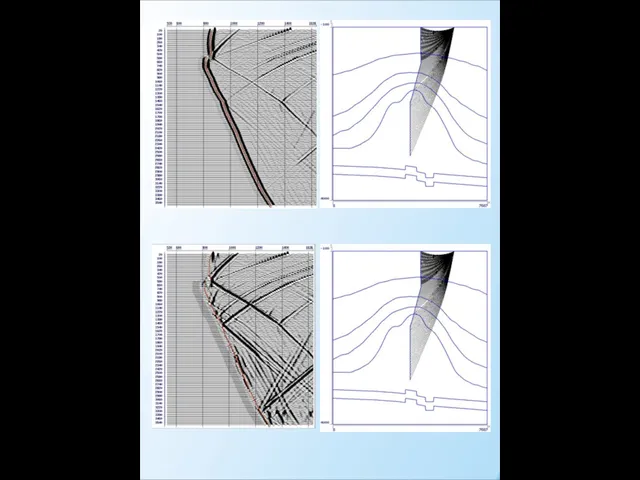
- 9. 5. Сопоставление параметров волн, рассчитанных лучевым и конечно-разностным методами. Кинематические параметры волн рассчитанные лучевым методом и
- 10. 6. Технология ДДР Технология обработки данных ВСП по методике ДДР состоит из нескольких процедур: 1. Построение
- 13. Скачать презентацию
Слайд 2
Содержание
1. Введение
2. Формулировка задач
3. Описание модели среды
4. Расчет лучей в двумерных
Содержание 1. Введение 2. Формулировка задач 3. Описание модели среды 4. Расчет лучей в двумерных
Слайд 3 1. Введение Как правило процессы обработки и интерпретации данных сейсморазведки эти
1. Введение Как правило процессы обработки и интерпретации данных сейсморазведки эти
Слайд 4 2. Формулировка задач
Для применения лучевого метода, являющегося высокочастотным приближением, модель
2. Формулировка задач Для применения лучевого метода, являющегося высокочастотным приближением, модель
Слайд 53. Описание модели среды
Исходная модель, заданная наборами точек на границах аппроксимируется
3. Описание модели среды Исходная модель, заданная наборами точек на границах аппроксимируется
Слайд 6 Для слежения лучей модель была разбита на квадратную сетку с шагом,
Для слежения лучей модель была разбита на квадратную сетку с шагом,
Слайд 7Так как скорости меняются нелинейно, то слежение луча проводится пошагово. Направление и
Так как скорости меняются нелинейно, то слежение луча проводится пошагово. Направление и
Слайд 8Учет преломления-отражения в точке пересечения хорды луча с границей производиться следующим образом:
В
Учет преломления-отражения в точке пересечения хорды луча с границей производиться следующим образом:
В
Слайд 95. Сопоставление параметров волн, рассчитанных лучевым и конечно-разностным методами.
Кинематические параметры волн
5. Сопоставление параметров волн, рассчитанных лучевым и конечно-разностным методами. Кинематические параметры волн
Слайд 10 6. Технология ДДР
Технология обработки данных ВСП по методике ДДР состоит
6. Технология ДДР Технология обработки данных ВСП по методике ДДР состоит
 Нахождение неизвестного слагаемого 1 класс
Нахождение неизвестного слагаемого 1 класс Цветы и травы
Цветы и травы Педагог-психолог, кандидат психологических наук Сотникова Ю.А. 2012 год
Педагог-психолог, кандидат психологических наук Сотникова Ю.А. 2012 год Etiket_v_Rossii
Etiket_v_Rossii Кто живёт в нашем лесу?
Кто живёт в нашем лесу? La beauté du Passé Simple au hasard de textes rigoureusement français …
La beauté du Passé Simple au hasard de textes rigoureusement français … Установка на практику 1
Установка на практику 1 Power central Аsia utility support approach
Power central Аsia utility support approach Презентация без названия
Презентация без названия День матери
День матери Неопределенно-личные предложения
Неопределенно-личные предложения Формирование системы работы с одаренными и слабоуспевающими детьми
Формирование системы работы с одаренными и слабоуспевающими детьми Презентация на тему Философия управления персоналом и философия организации
Презентация на тему Философия управления персоналом и философия организации  Словесные игры на уроках русского языка с использованием компьютера
Словесные игры на уроках русского языка с использованием компьютера Проектный семинар
Проектный семинар Urboekologia
Urboekologia Профессиональный стресс
Профессиональный стресс Преодоление страхов и психолого-эмоционального напряжения средствами данстерапии
Преодоление страхов и психолого-эмоционального напряжения средствами данстерапии Иван Петрович Павлов
Иван Петрович Павлов Иудаизм, буддизм
Иудаизм, буддизм Материалы к элективному курсу« От текста к тексту»
Материалы к элективному курсу« От текста к тексту» Капитанская дочка
Капитанская дочка Образ японских построек
Образ японских построек Назначение ПТЭ. Общие обязанности работников железнодорожного транспорта
Назначение ПТЭ. Общие обязанности работников железнодорожного транспорта Изучение состояния природной группировки рогульника
Изучение состояния природной группировки рогульника Виды грибов (1 класс)
Виды грибов (1 класс) Великие русские художники и их картины
Великие русские художники и их картины Far-fetched or feasible
Far-fetched or feasible