- Исследование накопленного

Содержание
- 2. Проблемный вопрос: Какие стадии развития прошли исследования современного андроидного робота?
- 3. Роботы – это механические помощники человека, способные выполнять операции по заложенной в них программе и реагировать
- 4. С XIV до XVI ВЕКА 1478 г. Знаменитый рисунок Леонардо да Винчи из его «Атлантического кодекса»,
- 5. XVII - XVIII ВЕКА 1738 г. Французский механик Жак де Вокансон (Jaques de Vaucanson) создает андроидов,
- 6. 1865 г. Джонни Брейнерд (Johnny Brainerd), одарённый конструктор, строит Парового Человека (Steam Man). Механизм Брейнерда был
- 7. 1900-1939 годы 1921 1921 г. Чешский писатель Карел Чапек (Karel Capek) в своей пьесе «R.U.R.» («Rossum's
- 8. 1940-е годы 1942 г. Айзек Азимов (Isaac Asimov) впервые использует в своем рассказе «Runaround» слово «робототехника»
- 9. 1950-е годы 1954 г. Джордж Девол (George Devol) разрабатывает первого промышленного программируемого робота и вводит термин
- 10. 1960-е годы 1960 г. Первый робот «Versatran», предназначенный для практического промышленного использования, разработан в компании AMF
- 11. 1980-е годы 1982 г. Начаты продажи персонального робота HERO 1. На управляющей плате HERO микропроцессор 6808,
- 12. 1990-е годы 1993 г. Родни Брукс в MIT строит робота-гуманоида по имени Cog, который следит за
- 13. 2000-2006 год 2000 г. Синтия Брезел (Cynthia Breazeal) в MIT создает робота, который может общаться с
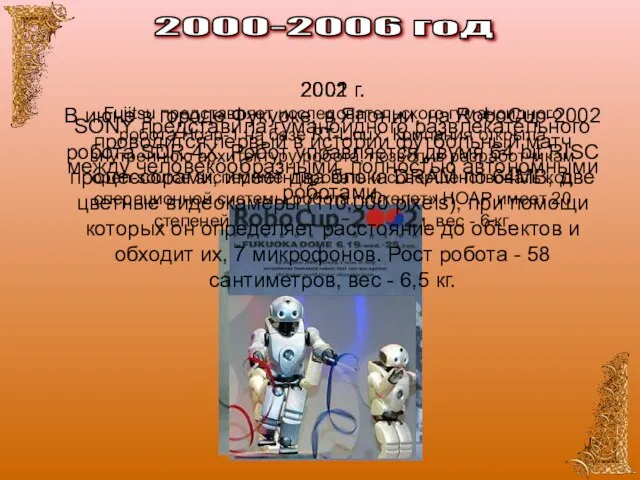
- 14. 2000-2006 год 2001 г. Fujitsu представляет исследовательского гуманоидного робота Hoap-1 на базе RT-Linux. Компания открыла внутреннюю
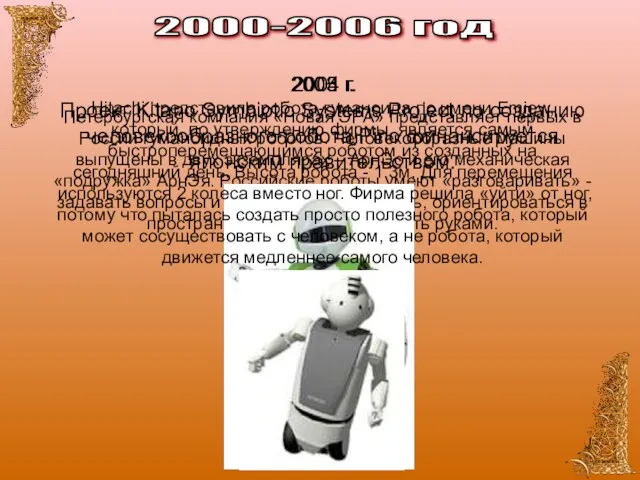
- 15. 2003 г. Петербургская компания «Новая ЭРА» представляет первых в России гуманоидных роботов. Человекообразные машины выпущены в
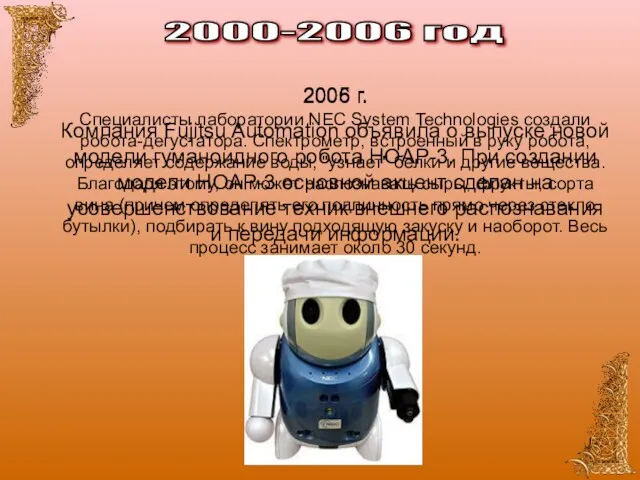
- 16. 2005 г. Компания Fujitsu Automation объявила о выпуске новой модели гуманоидного робота HOAP-3. При создании модели
- 17. Выводы: Первой идеей программируемого робота была разработка Леонардо да Винчи в 1478 году. С этого момента
- 18. V этап: 1950-1980 годы появления программируемых роботов, разработка отдельных частей андроидного робота; VI этап: 1980-1990 годы
- 19. Источники: «На Урале начали серийный выпуск андроидных роботов» [электронный ресурс]: статья. – Режим доступа: www.e1.ru «В
- 21. Скачать презентацию
Слайд 3Роботы – это механические помощники человека, способные выполнять операции по заложенной в
Роботы – это механические помощники человека, способные выполнять операции по заложенной в
Слайд 4С XIV до XVI ВЕКА
1478 г.
Знаменитый рисунок Леонардо да Винчи из
С XIV до XVI ВЕКА
1478 г.
Знаменитый рисунок Леонардо да Винчи из

Слайд 5XVII - XVIII ВЕКА
1738 г.
Французский механик Жак де Вокансон (Jaques de
XVII - XVIII ВЕКА
1738 г.
Французский механик Жак де Вокансон (Jaques de
Слайд 61865 г.
Джонни Брейнерд (Johnny Brainerd), одарённый конструктор, строит Парового Человека (Steam Man).
1865 г.
Джонни Брейнерд (Johnny Brainerd), одарённый конструктор, строит Парового Человека (Steam Man).
Слайд 71900-1939 годы
1921
1921 г.
Чешский писатель Карел Чапек (Karel Capek) в своей
1900-1939 годы
1921
1921 г.
Чешский писатель Карел Чапек (Karel Capek) в своей
Слайд 81940-е годы
1942 г.
Айзек Азимов (Isaac Asimov) впервые использует в своем рассказе
1940-е годы
1942 г.
Айзек Азимов (Isaac Asimov) впервые использует в своем рассказе
Слайд 91950-е годы
1954 г.
Джордж Девол (George Devol) разрабатывает первого промышленного программируемого робота
1950-е годы
1954 г.
Джордж Девол (George Devol) разрабатывает первого промышленного программируемого робота
Слайд 101960-е годы
1960 г.
Первый робот «Versatran», предназначенный для практического промышленного использования, разработан
1960-е годы
1960 г. Первый робот «Versatran», предназначенный для практического промышленного использования, разработан
Слайд 111980-е годы
1982 г.
Начаты продажи персонального робота HERO 1. На управляющей плате
1980-е годы
1982 г. Начаты продажи персонального робота HERO 1. На управляющей плате

Слайд 121990-е годы
1993 г.
Родни Брукс в MIT строит робота-гуманоида по имени Cog,
1990-е годы
1993 г.
Родни Брукс в MIT строит робота-гуманоида по имени Cog,

Слайд 132000-2006 год
2000 г.
Синтия Брезел (Cynthia Breazeal) в MIT создает робота, который
2000-2006 год
2000 г.
Синтия Брезел (Cynthia Breazeal) в MIT создает робота, который

Слайд 142000-2006 год
2001 г.
Fujitsu представляет исследовательского гуманоидного робота Hoap-1 на базе RT-Linux.
2000-2006 год
2001 г.
Fujitsu представляет исследовательского гуманоидного робота Hoap-1 на базе RT-Linux.
Слайд 152003 г.
Петербургская компания «Новая ЭРА» представляет первых в России гуманоидных роботов. Человекообразные
2003 г.
Петербургская компания «Новая ЭРА» представляет первых в России гуманоидных роботов. Человекообразные
Слайд 162005 г.
Компания Fujitsu Automation объявила о выпуске новой модели гуманоидного робота
2005 г.
Компания Fujitsu Automation объявила о выпуске новой модели гуманоидного робота
Слайд 17Выводы:
Первой идеей программируемого робота была разработка Леонардо да Винчи в 1478 году.
Выводы:
Первой идеей программируемого робота была разработка Леонардо да Винчи в 1478 году.
Слайд 18V этап: 1950-1980 годы появления программируемых роботов, разработка отдельных частей андроидного робота;
VI
V этап: 1950-1980 годы появления программируемых роботов, разработка отдельных частей андроидного робота;
VI
Слайд 19Источники:
«На Урале начали серийный выпуск андроидных роботов» [электронный ресурс]: статья. – Режим
Источники:
«На Урале начали серийный выпуск андроидных роботов» [электронный ресурс]: статья. – Режим
![Источники: «На Урале начали серийный выпуск андроидных роботов» [электронный ресурс]: статья. –](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/397224/slide-18.jpg)
 ИТС ПРОФ - профессиональная информационная система для бухгалтераи руководителя
ИТС ПРОФ - профессиональная информационная система для бухгалтераи руководителя EasyMani
EasyMani Pepsi - участник фестиваля Пикник Афиша
Pepsi - участник фестиваля Пикник Афиша Именины Загоскина М.Н
Именины Загоскина М.Н Исаак Бабель
Исаак Бабель В некотором царстве,В некотором государстве,вернее в ТюрлемеЖивет своей жизнью
В некотором царстве,В некотором государстве,вернее в ТюрлемеЖивет своей жизнью Памятники Гоголю
Памятники Гоголю Правила безопасного обращения с бытовыми электроприборами
Правила безопасного обращения с бытовыми электроприборами Черная металлургия
Черная металлургия Психолого-педагогическая диагностика
Психолого-педагогическая диагностика Рукописные книги
Рукописные книги Использование приёмов технологии развития критического мышления при написании части «С».
Использование приёмов технологии развития критического мышления при написании части «С». МЕДИЦИНСКАЯ И БИОЛОГИЧЕСКАЯ ФИЗИКА
МЕДИЦИНСКАЯ И БИОЛОГИЧЕСКАЯ ФИЗИКА Передача жилых домов в управление
Передача жилых домов в управление Aleksander Sergeevich PUSHKIN 1799-1837
Aleksander Sergeevich PUSHKIN 1799-1837 Сергей Александрович Есенин.(1895-1925)
Сергей Александрович Есенин.(1895-1925) Презентация на тему "Будни и праздники 5 класса" - скачать презентации по Педагогике
Презентация на тему "Будни и праздники 5 класса" - скачать презентации по Педагогике Эпоха возрождения
Эпоха возрождения Интуитивные решения. Интуитивное мышление
Интуитивные решения. Интуитивное мышление Ведение реестра организаций отдыха детей и их оздоровления , расположенных на территории Свердловской области
Ведение реестра организаций отдыха детей и их оздоровления , расположенных на территории Свердловской области экстр пси ДПО
экстр пси ДПО Профессии в области хореографии
Профессии в области хореографии Изменение величин
Изменение величин Поведение во время грозы
Поведение во время грозы Тайна бумажного листа
Тайна бумажного листа Воспитательная программа «Любознайки»
Воспитательная программа «Любознайки» Век Просвещения
Век Просвещения Проблемный метод обученияв преподавании истории
Проблемный метод обученияв преподавании истории