- Математика в компьютерной графике

Содержание
- 2. Базовые понятия свободные векторы, радиус векторы, операции с векторами, скалярное и векторное произведение векторов (vector dot
- 3. Преобразования (transformations) Аффинные Перспективные Билинейные
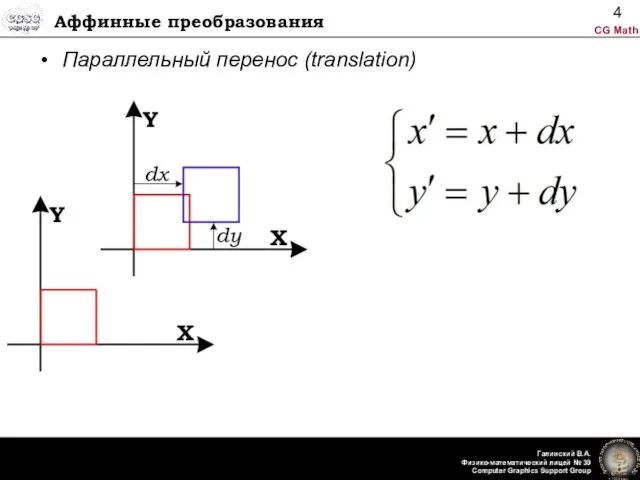
- 4. Аффинные преобразования Параллельный перенос (translation)
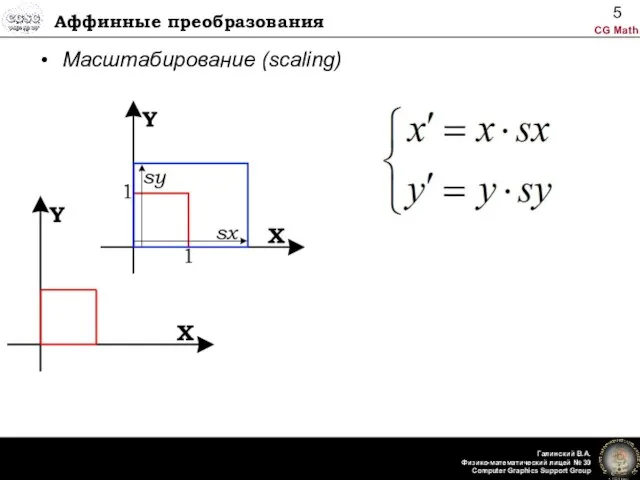
- 5. Аффинные преобразования Масштабирование (scaling)
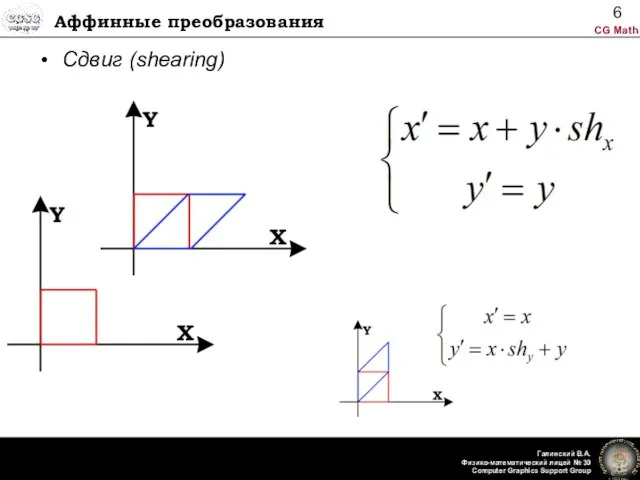
- 6. Аффинные преобразования Сдвиг (shearing)
- 7. Аффинные преобразования Масштабирование (scaling)
- 8. Аффинные преобразования Поворот относительно начала координат (rotation) r
- 9. Матричная запись аффинных преобразований Перепишем в матричном виде общую запись аффинных преобразований:
- 10. Однородные координаты (homogeneous) представим координаты на плоскости (2D) трехкомпонентной вектор - строкой: будем полагать w =
- 11. Матричный вид аффинных преобразований ~ translation ~ translation ~ shear by x ~ shear by y
- 12. Композиция преобразований подвергнем точку последовательным преобразованиям системы координат: перепишем: в силу ассоциативности:
- 13. Обратные аффинные преобразования
- 14. Преобразование точек, векторов и нормалей точка (радиус-вектор) (p): вектор (v) и нормаль (n) (только направление): преобразования:
- 15. Преобразование нормалей
- 16. Нотации записи: столбец или строка Одно преобразование: Композиция преобразований:
- 17. Пример: привязка систем координат заданы точки соответствия найти «матрицу перехода»
- 18. Пример: привязка систем координат
- 19. Пример: преобразование изображений Поворот и масштабирование => Прямое отображение (direct mapping) =>
- 20. Пример: warping (1)
- 21. Пример: warping (2) Аффинные преобразования Билинейные преобразования Перспективные преобразования
- 22. Пример: warping (3) Аффинные преобразования Билинейные преобразования Перспективные преобразования
- 23. Пример: morphing morphing = warping + интерполяция цвета
- 24. Перспективные преобразования
- 25. Привязка с перспективным преобразованием (1) общая формула: прямое отображение: полагаем w=1, итоговая формула для координат:
- 26. Привязка с перспективным преобразованием (2) получаем матрицу обратного отображения определитель присутствует и в числителе и в
- 27. Привязка с перспективным преобразованием (3) Задача привязки: по 4 точкам соответствия определить матрицу перехода:
- 28. Привязка с перспективным преобразованием (4) запишем зависимость (выразим координаты x и y): выпишем в матричной форме
- 29. Привязка с перспективным преобразованием (5) для упрощения задачи переход ищем из единичного квадрата: получаем:
- 30. Привязка с перспективным преобразованием (6) обозначаем: и находим решение:
- 31. Аффинные преобразования в пространстве Аналогично случаю 2D вводим однородные координаты: и преобразования в общем случае:
- 32. Матрицы 3D преобразований (перенос, масштаб) ~ translation ~ scaling
- 33. Матрицы 3D преобразований (поворот вокруг осей) ~ rotation
- 34. Матрицы 3D преобразований (поворот вокруг оси) Поворот вокруг произвольной оси, проходящей через начало координат. Ось задается
- 35. Пример: построение матрицы камеры (1) камера задается: позиция С и векторы направление «вверх» V, «враво» U
- 36. Пример: построение матрицы камеры (2) после преобразования вектора отобразятся: т.е.
- 37. Пример: построение матрицы камеры (3) зная находим
- 39. Скачать презентацию
Слайд 2Базовые понятия
свободные векторы, радиус векторы, операции с векторами, скалярное и векторное произведение
Базовые понятия
свободные векторы, радиус векторы, операции с векторами, скалярное и векторное произведение
Слайд 3Преобразования (transformations)
Аффинные
Перспективные
Билинейные
Преобразования (transformations)
Аффинные
Перспективные
Билинейные

Слайд 4Аффинные преобразования
Параллельный перенос (translation)
Аффинные преобразования
Параллельный перенос (translation)
Слайд 5Аффинные преобразования
Масштабирование (scaling)
Аффинные преобразования
Масштабирование (scaling)
Слайд 6Аффинные преобразования
Сдвиг (shearing)
Аффинные преобразования
Сдвиг (shearing)
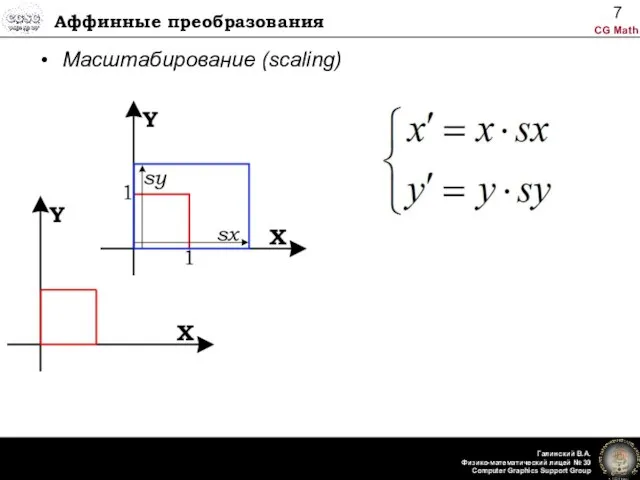
Слайд 7Аффинные преобразования
Масштабирование (scaling)
Аффинные преобразования
Масштабирование (scaling)
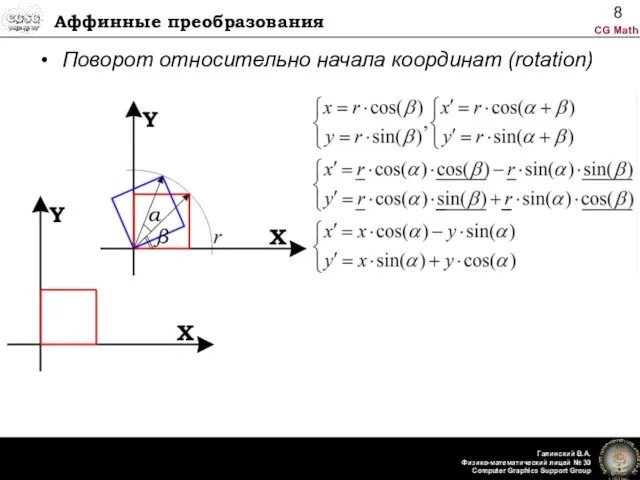
Слайд 8Аффинные преобразования
Поворот относительно начала координат (rotation)
r
Аффинные преобразования
Поворот относительно начала координат (rotation)
r
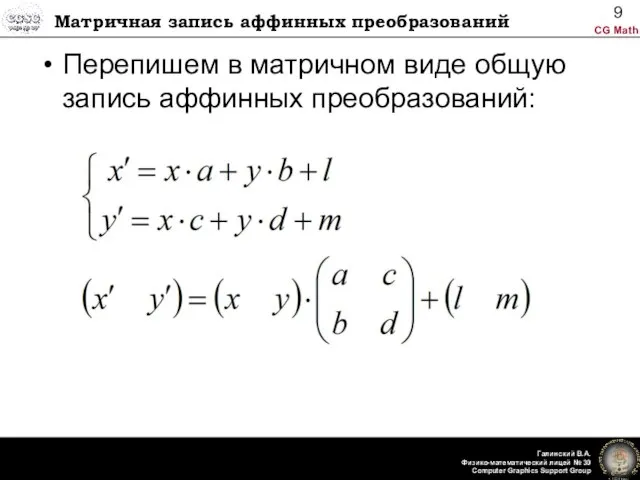
Слайд 9Матричная запись аффинных преобразований
Перепишем в матричном виде общую запись аффинных преобразований:
Матричная запись аффинных преобразований
Перепишем в матричном виде общую запись аффинных преобразований:
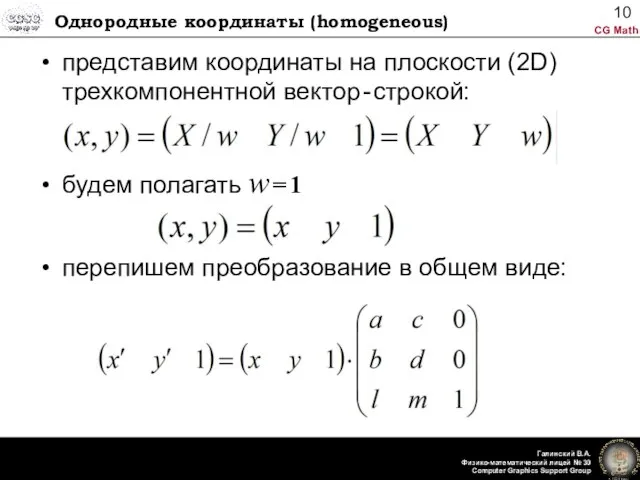
Слайд 10Однородные координаты (homogeneous)
представим координаты на плоскости (2D) трехкомпонентной вектор - строкой:
будем полагать
Однородные координаты (homogeneous)
представим координаты на плоскости (2D) трехкомпонентной вектор - строкой:
будем полагать
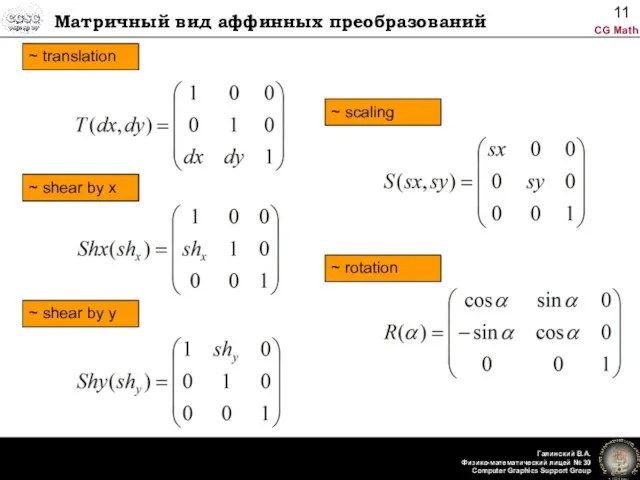
Слайд 11Матричный вид аффинных преобразований
~ translation
~ translation
~ shear by x
~ shear by y
~
Матричный вид аффинных преобразований
~ translation
~ translation
~ shear by x
~ shear by y
~
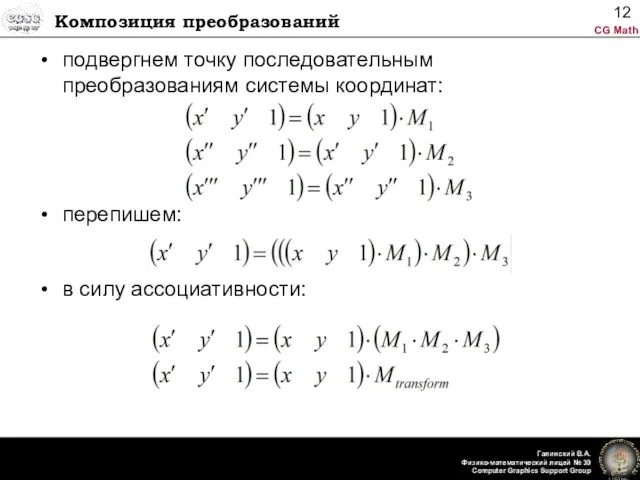
Слайд 12Композиция преобразований
подвергнем точку последовательным преобразованиям системы координат:
перепишем:
в силу ассоциативности:
Композиция преобразований
подвергнем точку последовательным преобразованиям системы координат:
перепишем:
в силу ассоциативности:
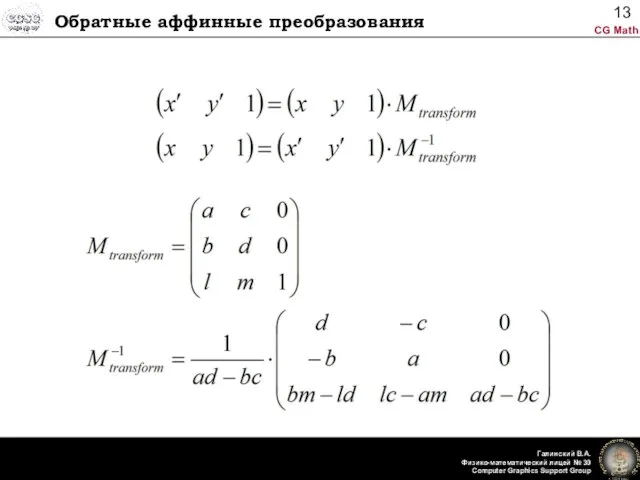
Слайд 13Обратные аффинные преобразования
Обратные аффинные преобразования
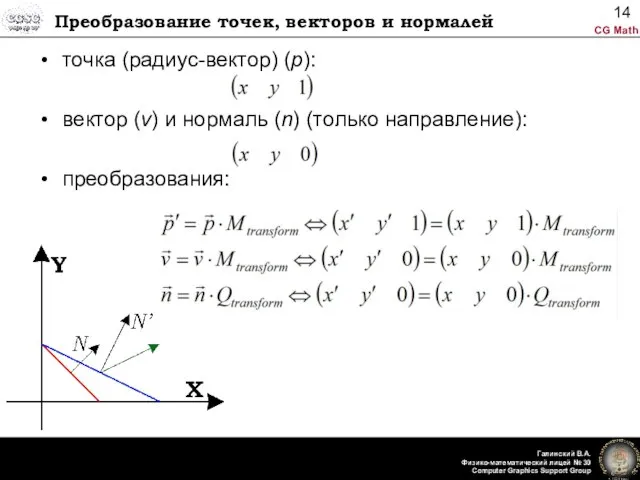
Слайд 14Преобразование точек, векторов и нормалей
точка (радиус-вектор) (p):
вектор (v) и нормаль (n) (только
Преобразование точек, векторов и нормалей
точка (радиус-вектор) (p):
вектор (v) и нормаль (n) (только
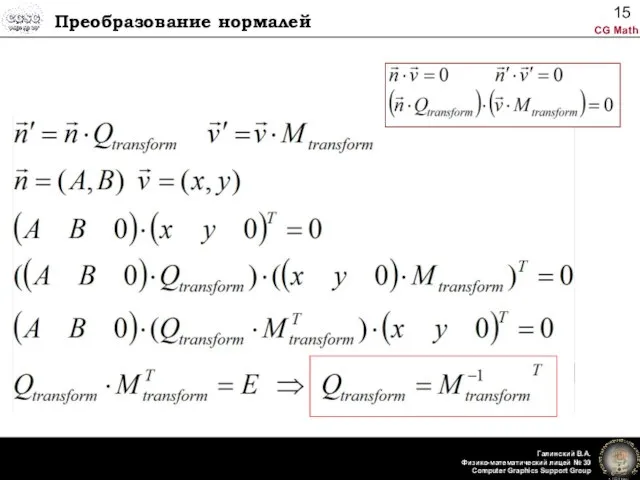
Слайд 15Преобразование нормалей
Преобразование нормалей
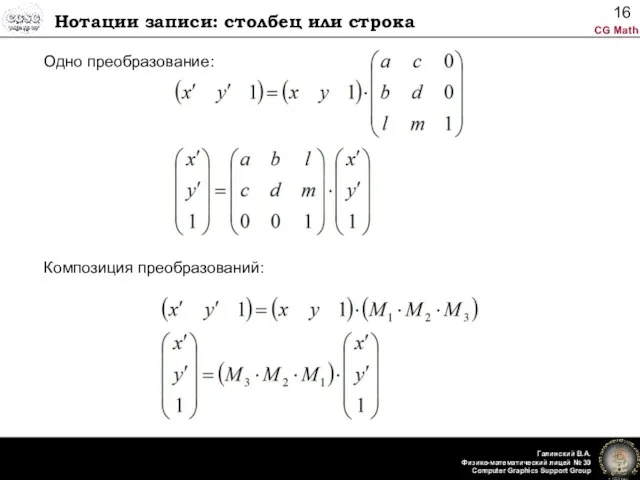
Слайд 16Нотации записи: столбец или строка
Одно преобразование:
Композиция преобразований:
Нотации записи: столбец или строка
Одно преобразование:
Композиция преобразований:
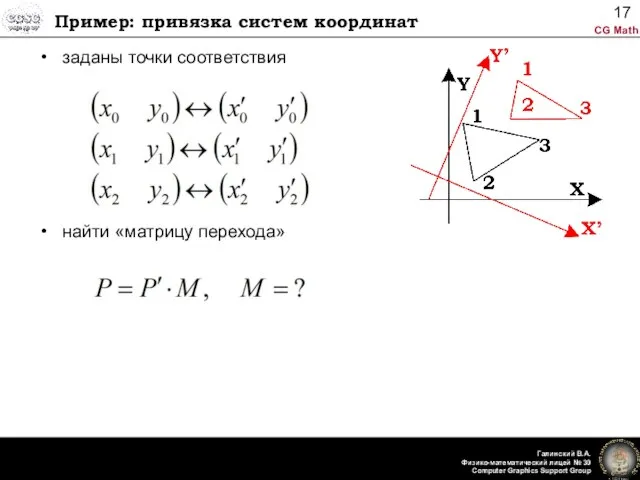
Слайд 17Пример: привязка систем координат
заданы точки соответствия
найти «матрицу перехода»
Пример: привязка систем координат
заданы точки соответствия
найти «матрицу перехода»
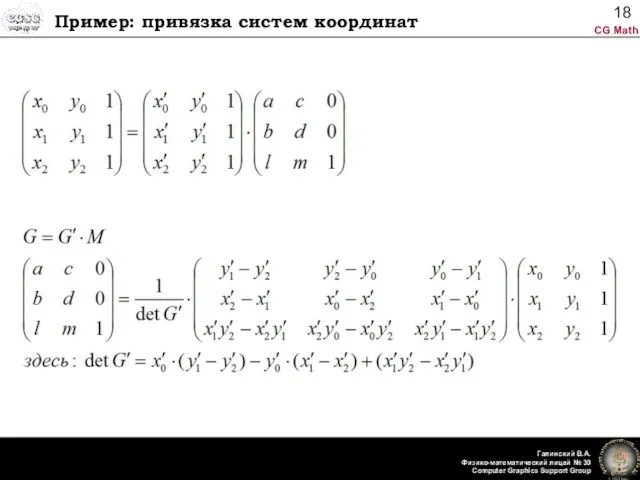
Слайд 18Пример: привязка систем координат
Пример: привязка систем координат
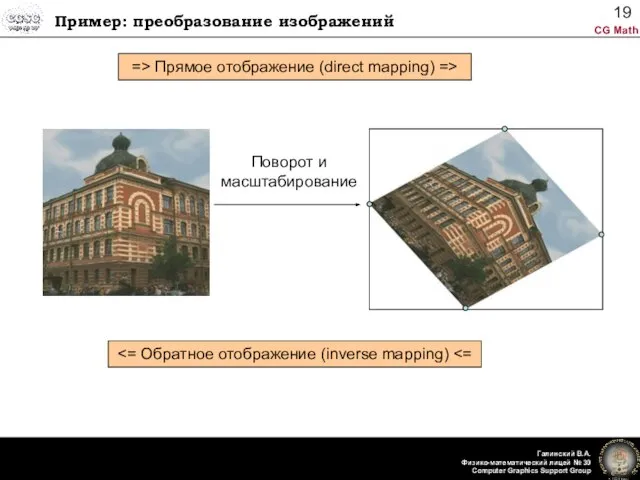
Слайд 19Пример: преобразование изображений
Поворот и
масштабирование
=> Прямое отображение (direct mapping) =>
<= Обратное отображение (inverse
Пример: преобразование изображений
Поворот и
масштабирование
=> Прямое отображение (direct mapping) =>
<= Обратное отображение (inverse
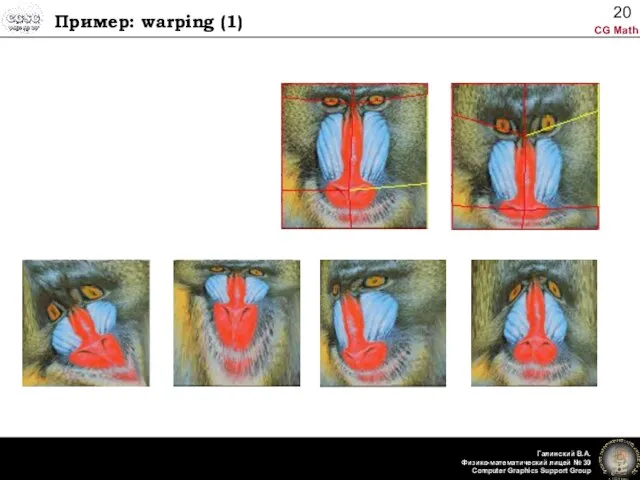
Слайд 20Пример: warping (1)
Пример: warping (1)
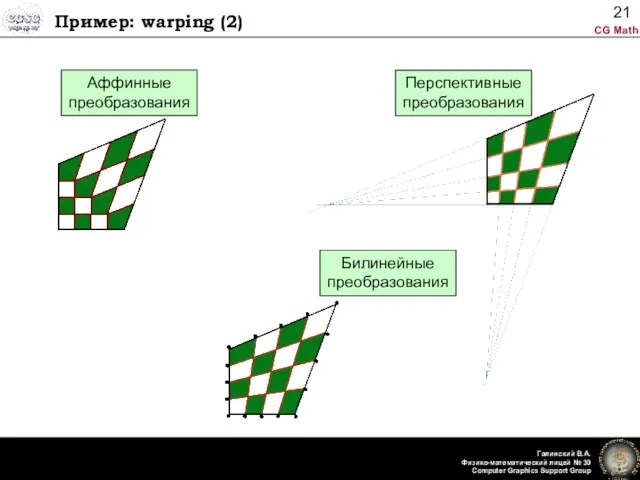
Слайд 21Пример: warping (2)
Аффинные
преобразования
Билинейные
преобразования
Перспективные
преобразования
Пример: warping (2)
Аффинные
преобразования
Билинейные
преобразования
Перспективные
преобразования
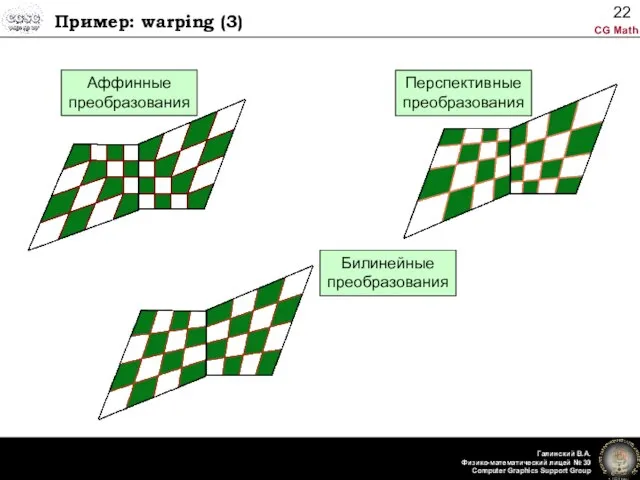
Слайд 22Пример: warping (3)
Аффинные
преобразования
Билинейные
преобразования
Перспективные
преобразования
Пример: warping (3)
Аффинные
преобразования
Билинейные
преобразования
Перспективные
преобразования
Слайд 23Пример: morphing
morphing = warping + интерполяция цвета
Пример: morphing
morphing = warping + интерполяция цвета
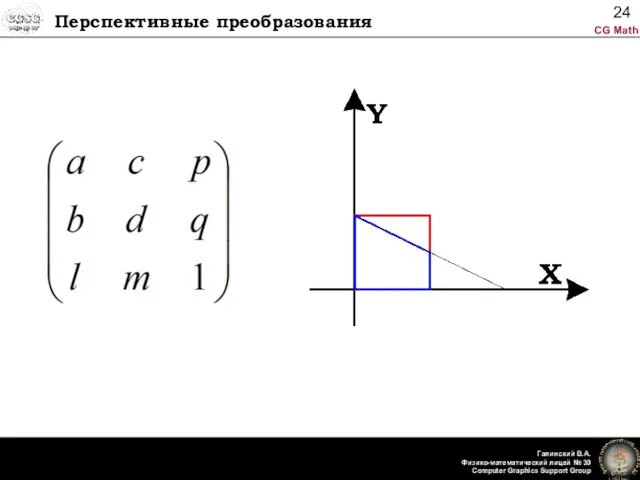
Слайд 24Перспективные преобразования
Перспективные преобразования
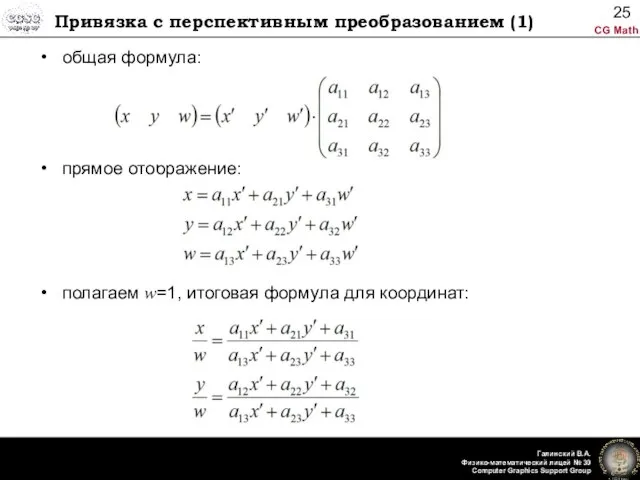
Слайд 25Привязка с перспективным преобразованием (1)
общая формула:
прямое отображение:
полагаем w=1, итоговая формула для координат:
Привязка с перспективным преобразованием (1)
общая формула:
прямое отображение:
полагаем w=1, итоговая формула для координат:
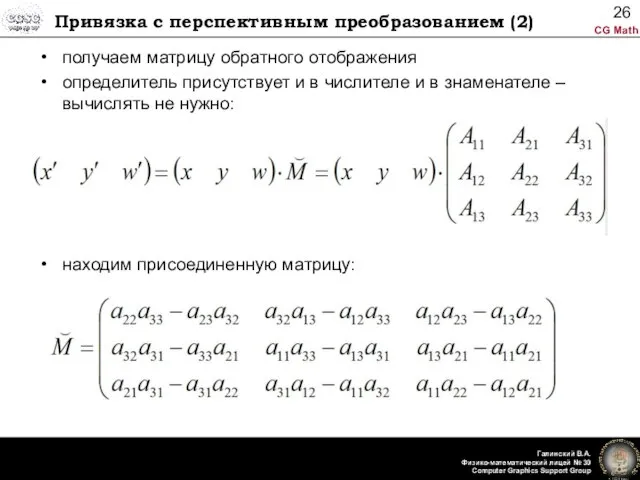
Слайд 26Привязка с перспективным преобразованием (2)
получаем матрицу обратного отображения
определитель присутствует и в числителе
Привязка с перспективным преобразованием (2)
получаем матрицу обратного отображения
определитель присутствует и в числителе
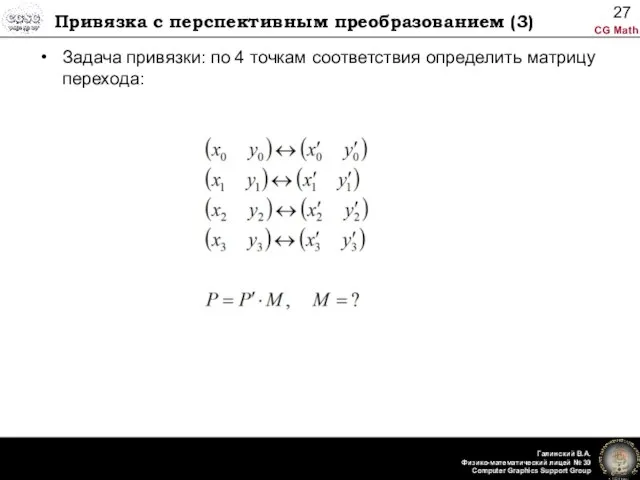
Слайд 27Привязка с перспективным преобразованием (3)
Задача привязки: по 4 точкам соответствия определить матрицу
Привязка с перспективным преобразованием (3)
Задача привязки: по 4 точкам соответствия определить матрицу
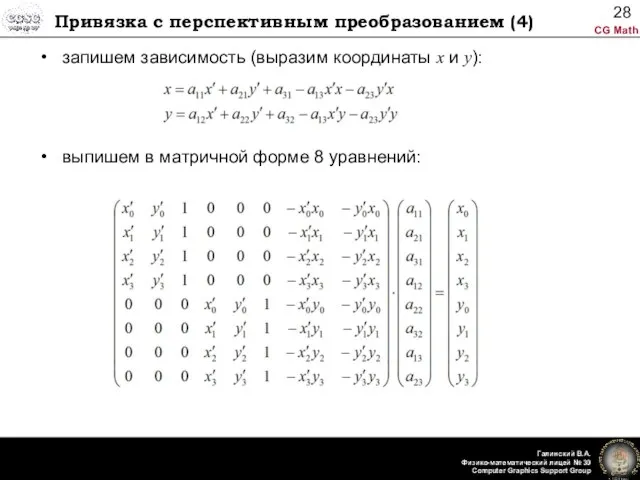
Слайд 28Привязка с перспективным преобразованием (4)
запишем зависимость (выразим координаты x и y):
выпишем в
Привязка с перспективным преобразованием (4)
запишем зависимость (выразим координаты x и y):
выпишем в
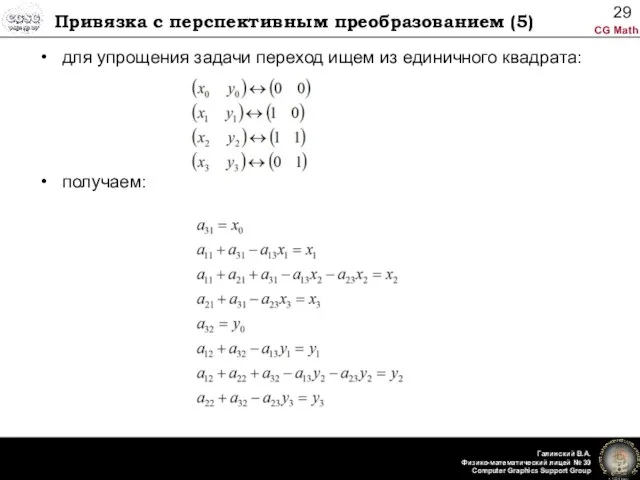
Слайд 29Привязка с перспективным преобразованием (5)
для упрощения задачи переход ищем из единичного квадрата:
получаем:
Привязка с перспективным преобразованием (5)
для упрощения задачи переход ищем из единичного квадрата:
получаем:
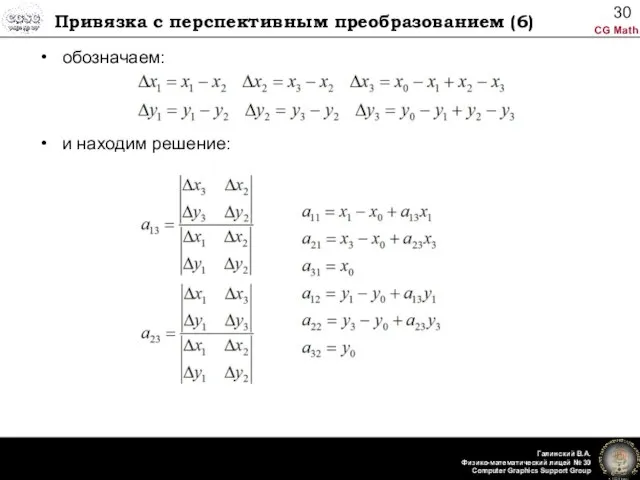
Слайд 30Привязка с перспективным преобразованием (6)
обозначаем:
и находим решение:
Привязка с перспективным преобразованием (6)
обозначаем:
и находим решение:
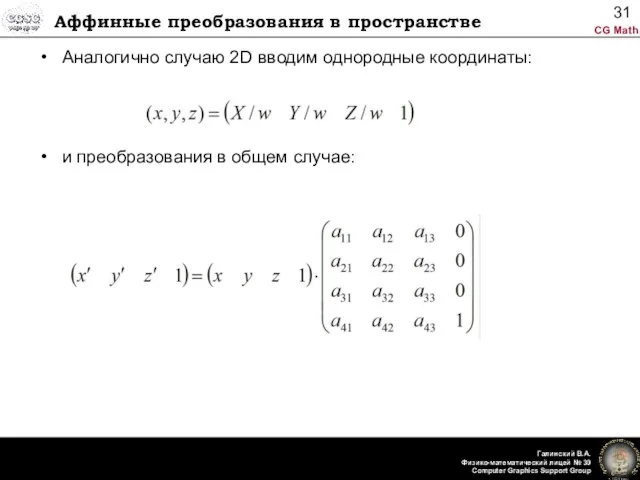
Слайд 31Аффинные преобразования в пространстве
Аналогично случаю 2D вводим однородные координаты:
и преобразования в общем
Аффинные преобразования в пространстве
Аналогично случаю 2D вводим однородные координаты:
и преобразования в общем
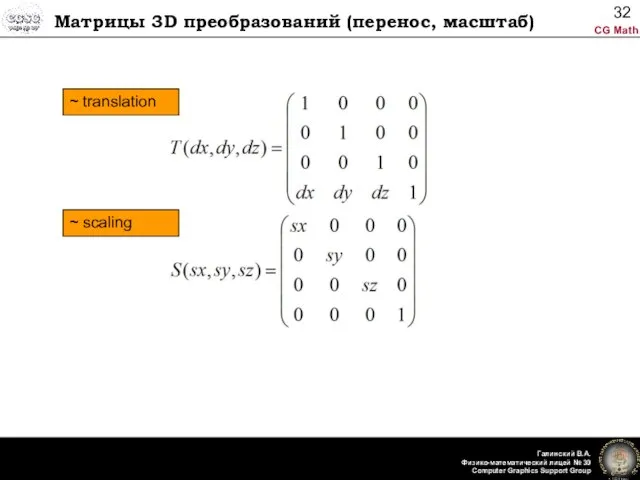
Слайд 32Матрицы 3D преобразований (перенос, масштаб)
~ translation
~ scaling
Матрицы 3D преобразований (перенос, масштаб)
~ translation
~ scaling
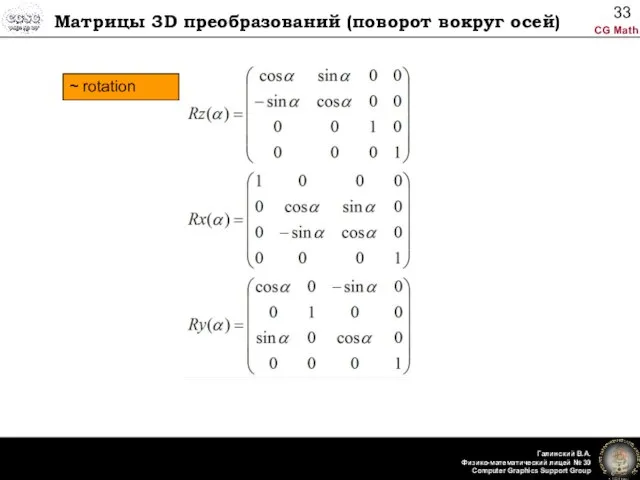
Слайд 33Матрицы 3D преобразований (поворот вокруг осей)
~ rotation
Матрицы 3D преобразований (поворот вокруг осей)
~ rotation
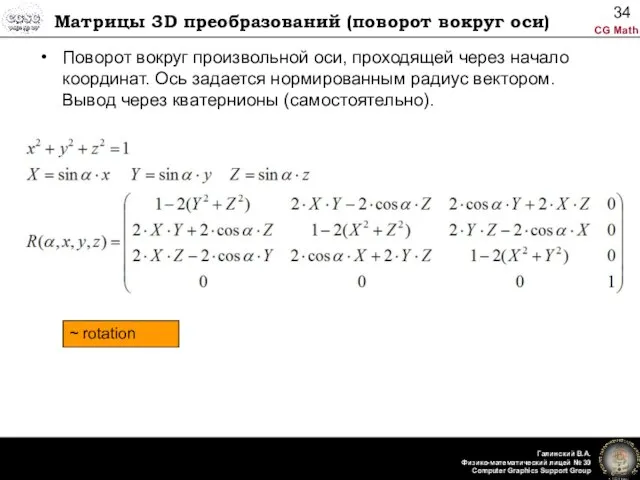
Слайд 34Матрицы 3D преобразований (поворот вокруг оси)
Поворот вокруг произвольной оси, проходящей через начало
Матрицы 3D преобразований (поворот вокруг оси)
Поворот вокруг произвольной оси, проходящей через начало
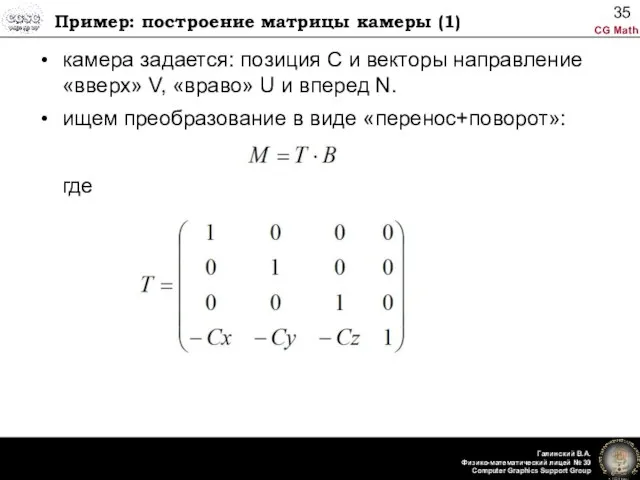
Слайд 35Пример: построение матрицы камеры (1)
камера задается: позиция С и векторы направление «вверх»
Пример: построение матрицы камеры (1)
камера задается: позиция С и векторы направление «вверх»
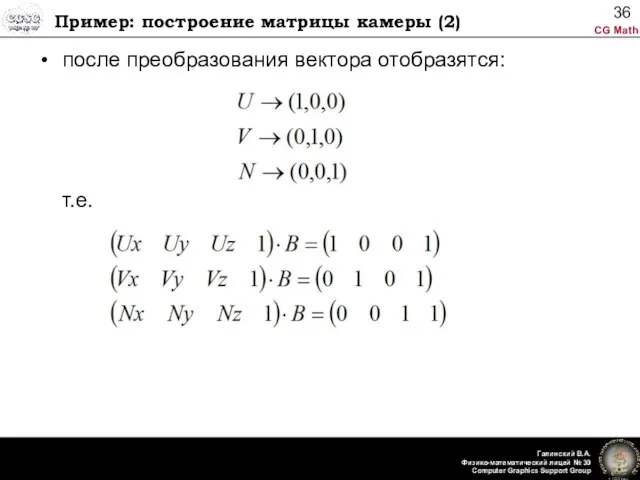
Слайд 36Пример: построение матрицы камеры (2)
после преобразования вектора отобразятся:
т.е.
Пример: построение матрицы камеры (2)
после преобразования вектора отобразятся:
т.е.
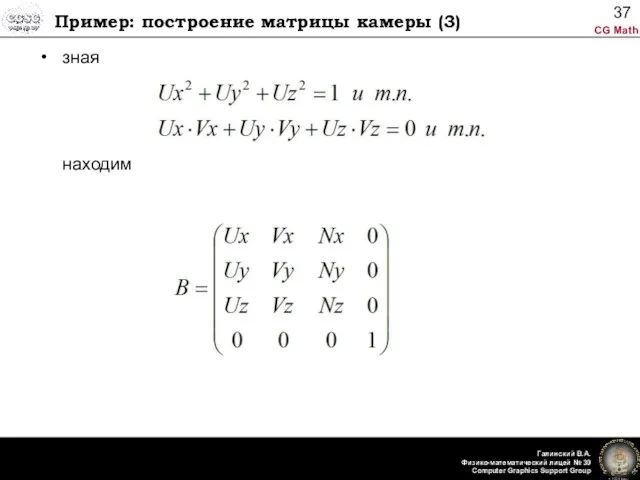
Слайд 37Пример: построение матрицы камеры (3)
зная
находим
Пример: построение матрицы камеры (3)
зная
находим
 Открытое мероприятие по изобразительному искусству
Открытое мероприятие по изобразительному искусству Ошибки людей при крушении Титаника
Ошибки людей при крушении Титаника Презентация на тему Параллельность прямых и плоскостей (10 класс)
Презентация на тему Параллельность прямых и плоскостей (10 класс) Презентация на тему Флаг России на английском
Презентация на тему Флаг России на английском  Деятельность Юбилейной сельской администрации за 2021 год
Деятельность Юбилейной сельской администрации за 2021 год Правовое государство
Правовое государство СПЕЦИФИЧНОЕ ПРИЛОЖЕНИЕ КЛИМАТА И МИНЕРАЛЬНыХ ВОД ВО ВРЕМЯ ЛЕЧЕНИЯ И ВОССТAНОВЛЕНИЯ АНДРОЛОГИЧЕСКИХ И ГИНЕКОЛОГИЧЕСКИХ ЗАБОЛЕВ
СПЕЦИФИЧНОЕ ПРИЛОЖЕНИЕ КЛИМАТА И МИНЕРАЛЬНыХ ВОД ВО ВРЕМЯ ЛЕЧЕНИЯ И ВОССТAНОВЛЕНИЯ АНДРОЛОГИЧЕСКИХ И ГИНЕКОЛОГИЧЕСКИХ ЗАБОЛЕВ Декоративно-прикладное искусство в современном мире
Декоративно-прикладное искусство в современном мире Памятники природы Красноярского края
Памятники природы Красноярского края УПРАВЛЕНИЕ РИСКАМИ И ПРОФИЛАКТИКА В СФЕРЕ ОХРАНЫ ТРУДА В НОВЫХ УСЛОВИЯХЗаместитель Министра здравоохранения и социального разв
УПРАВЛЕНИЕ РИСКАМИ И ПРОФИЛАКТИКА В СФЕРЕ ОХРАНЫ ТРУДА В НОВЫХ УСЛОВИЯХЗаместитель Министра здравоохранения и социального разв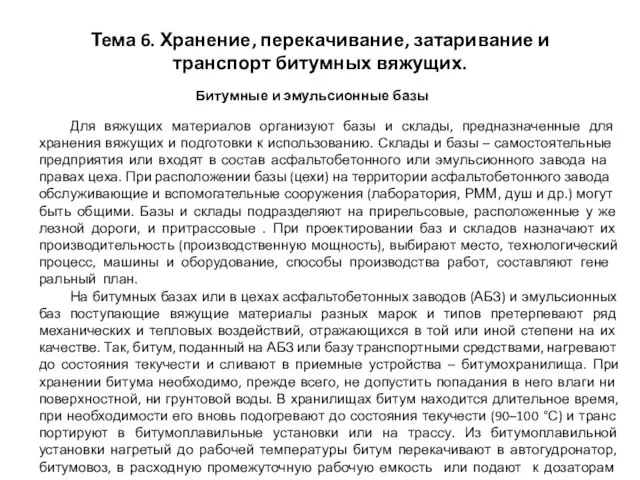 Хранение, перекачивание, затаривание и транспорт битумных вяжущих смесей. (Тема 6.1)
Хранение, перекачивание, затаривание и транспорт битумных вяжущих смесей. (Тема 6.1) Политическая география
Политическая география Лекции по физике. Оптика. Интерференция света
Лекции по физике. Оптика. Интерференция света СОВРЕМЕННЫЕ ТЕХНОЛОГИИ В МАРКЕТИНГЕ
СОВРЕМЕННЫЕ ТЕХНОЛОГИИ В МАРКЕТИНГЕ Презентация на тему Катерина и варвара
Презентация на тему Катерина и варвара Основы риторики и теории аргументации
Основы риторики и теории аргументации Энергоаудит
Энергоаудит «Опыт участия педагогов МОУ лицея №7 в проекте общественно-государственной экспертизы учебников»
«Опыт участия педагогов МОУ лицея №7 в проекте общественно-государственной экспертизы учебников» Презентация на тему Греки и критяне
Презентация на тему Греки и критяне Проект о здоровье и красоте
Проект о здоровье и красоте Мир иллюзий
Мир иллюзий Районный семинар «Использование И. Т на уроках в начальный школе»
Районный семинар «Использование И. Т на уроках в начальный школе» Русская трапеза
Русская трапеза Санкт - Петербургский государственный университет информационных технологий механики и оптикиКафедра: оптико-электронных прибо
Санкт - Петербургский государственный университет информационных технологий механики и оптикиКафедра: оптико-электронных прибо Презентация на тему "Неправильное питание" - скачать презентации по Медицине
Презентация на тему "Неправильное питание" - скачать презентации по Медицине Организация, нормирование и оплата труда
Организация, нормирование и оплата труда ЛИРИЧЕСКИЕ НАРОДНЫЕ ПЕСНИ
ЛИРИЧЕСКИЕ НАРОДНЫЕ ПЕСНИ Искусство Древнего Египта
Искусство Древнего Египта