- ОПТИМИЗАЦИЯ ПЕРЕЛЕТОВ ПРИ ОГРАНИЧЕНИЯХ НА НАПРАВЛЕНИЕ ТЯГИ

Содержание
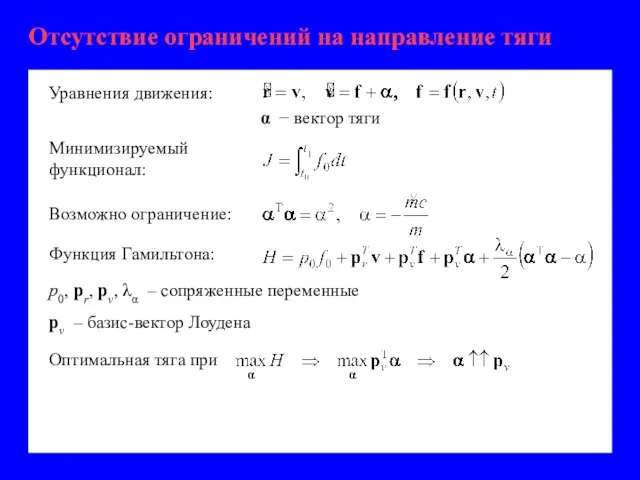
- 2. Отсутствие ограничений на направление тяги p0, pr, pv, λα – сопряженные переменные pv – базис-вектор Лоудена
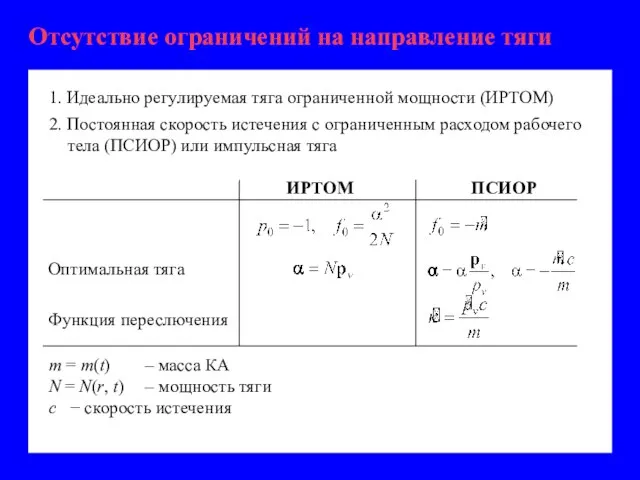
- 3. ПСИОР Оптимальная тяга Функция переслючения ИРТОМ m = m(t) – масса КА N = N(r, t)
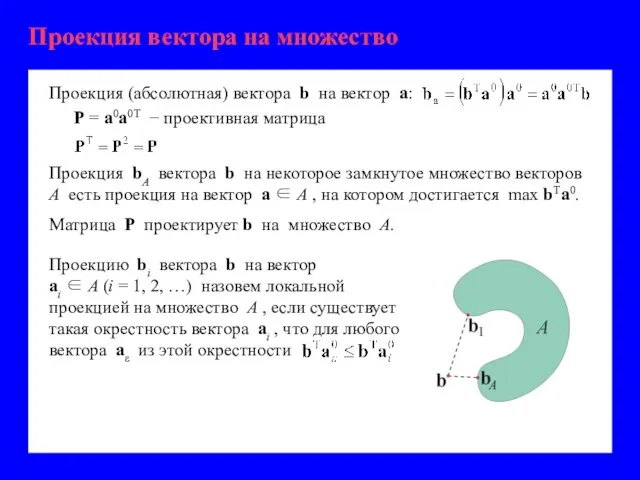
- 4. Проекция вектора на множество Проекция (абсолютная) вектора b на вектор a: Проекция bA вектора b на
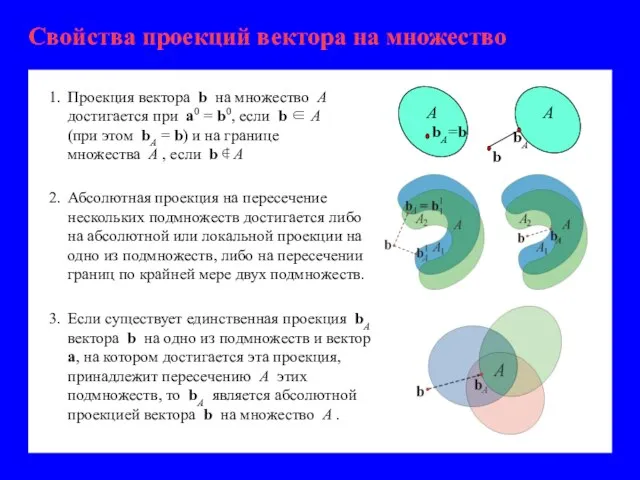
- 5. Свойства проекций вектора на множество
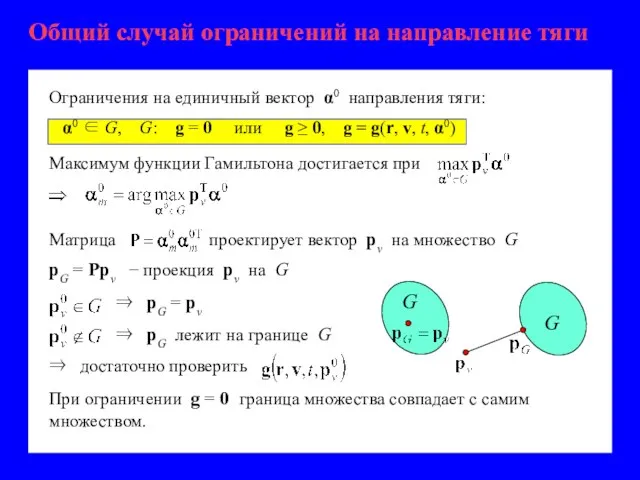
- 6. Общий случай ограничений на направление тяги Максимум функции Гамильтона достигается при Матрица проектирует вектор pv на
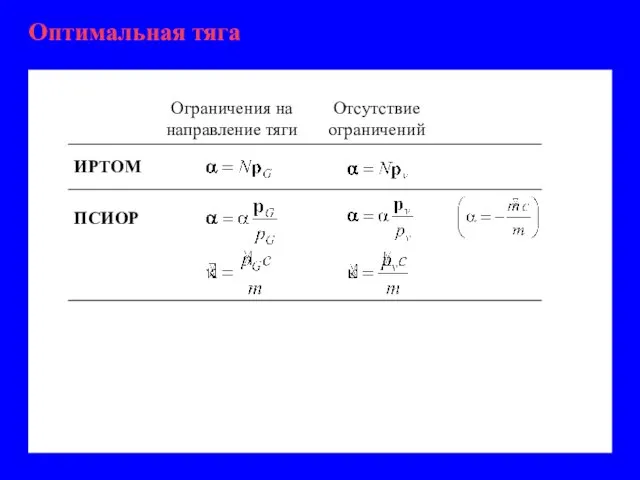
- 7. Оптимальная тяга Ограничения на направление тяги ИРТОМ ПСИОР Отсутствие ограничений
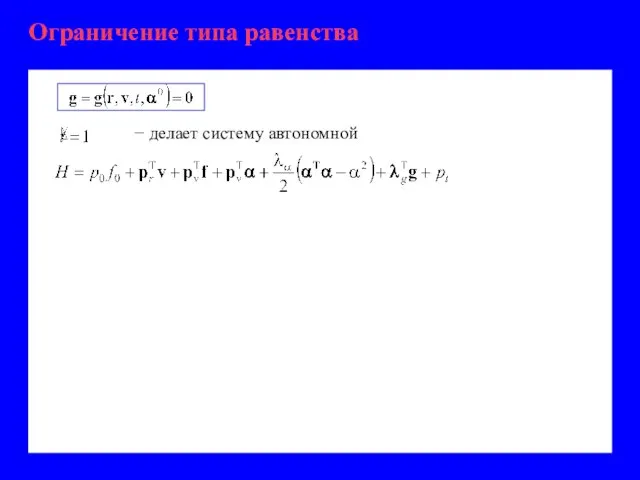
- 8. Ограничение типа равенства − делает систему автономной
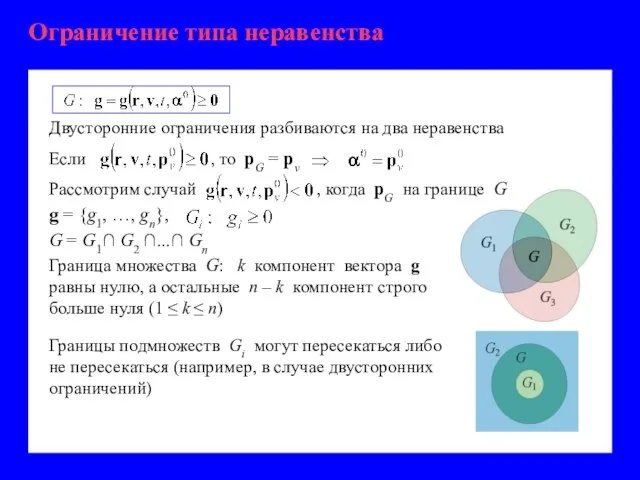
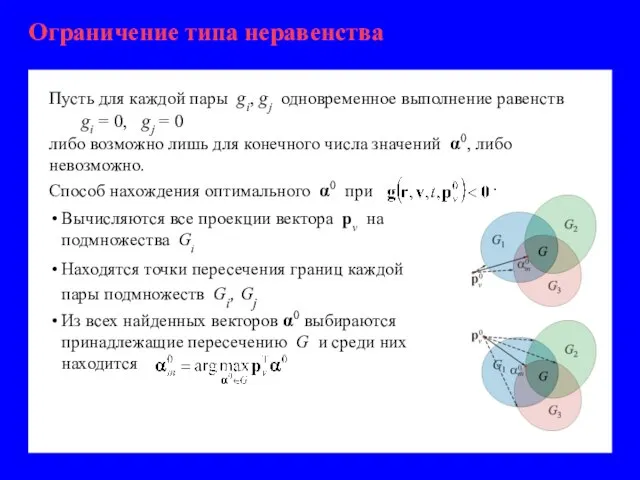
- 9. Ограничение типа неравенства Граница множества G: k компонент вектора g равны нулю, а остальные n –
- 10. Пусть для каждой пары gi, gj одновременное выполнение равенств gi = 0, gj = 0 либо
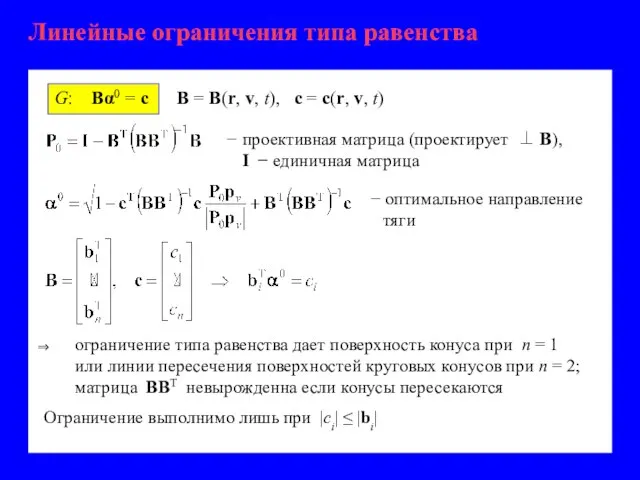
- 11. Линейные ограничения типа равенства G: Bα0 = c B = B(r, v, t), c = c(r,
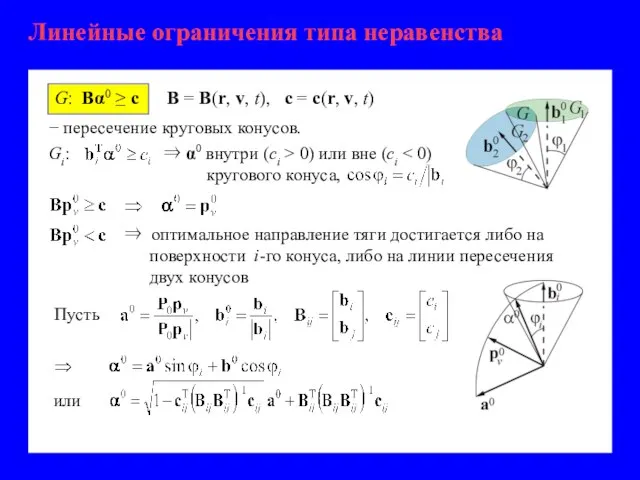
- 12. Линейные ограничения типа неравенства G: Bα0 ≥ c B = B(r, v, t), c = c(r,
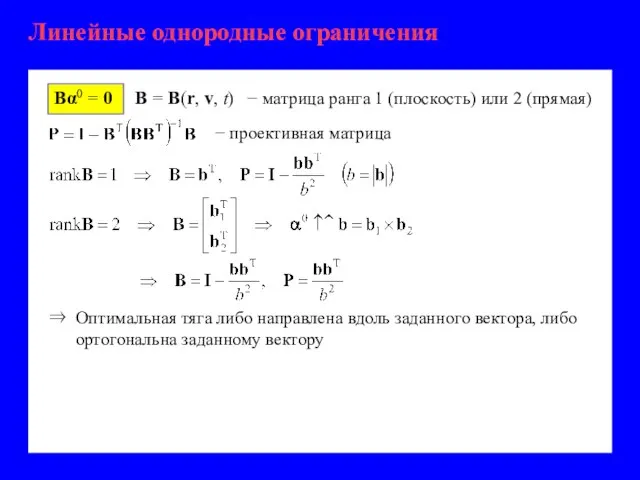
- 13. Линейные однородные ограничения − проективная матрица Bα0 = 0 B = B(r, v, t) − матрица
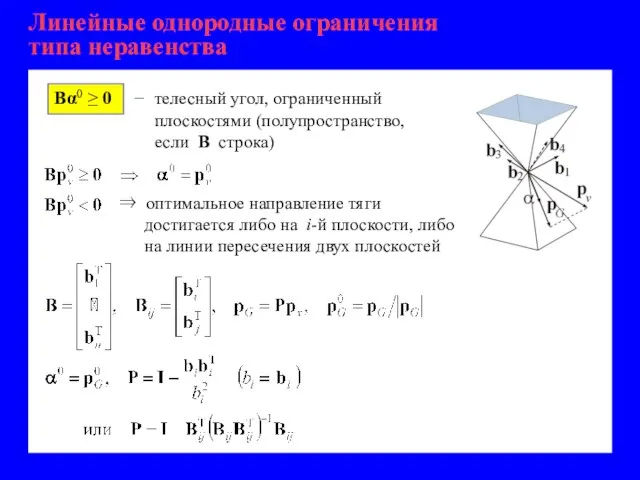
- 14. Линейные однородные ограничения типа неравенства Bα0 ≥ 0 − телесный угол, ограниченный плоскостями (полупространство, если В
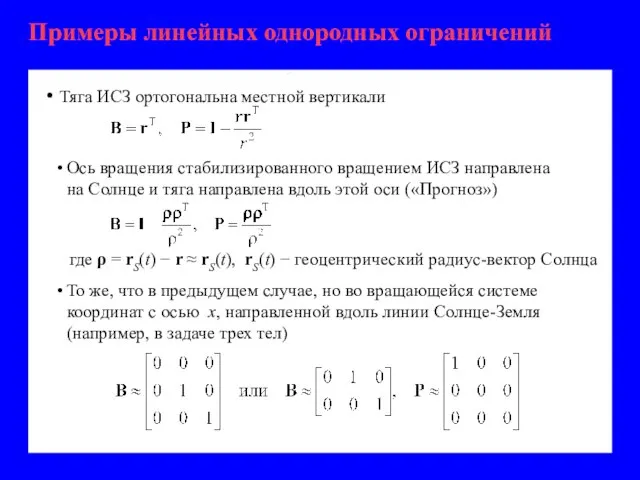
- 15. Примеры линейных однородных ограничений
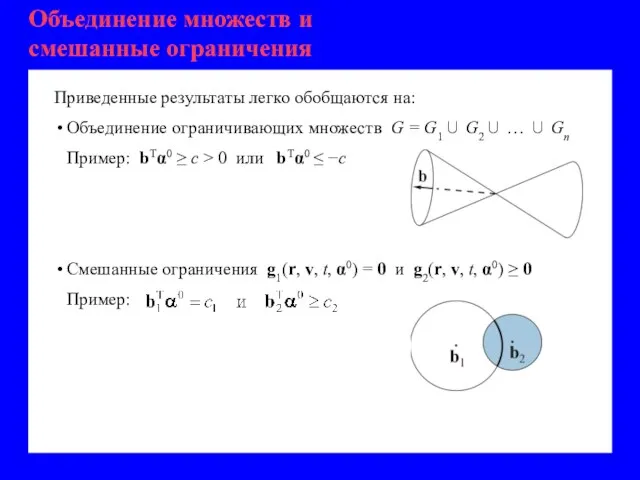
- 16. Объединение множеств и смешанные ограничения Приведенные результаты легко обобщаются на: Объединение ограничивающих множеств G = G1∪
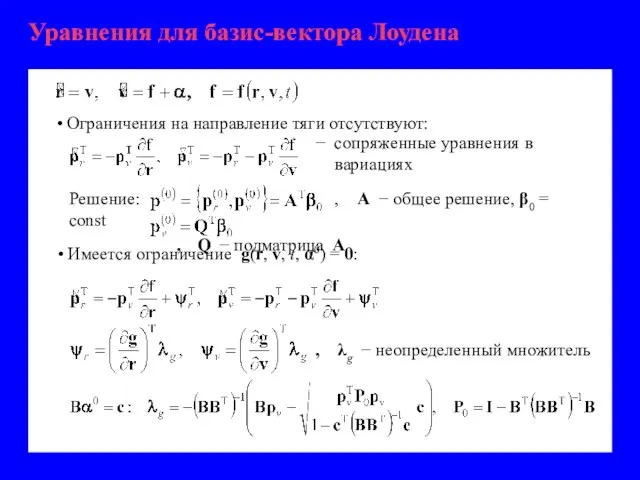
- 17. Уравнения для базис-вектора Лоудена
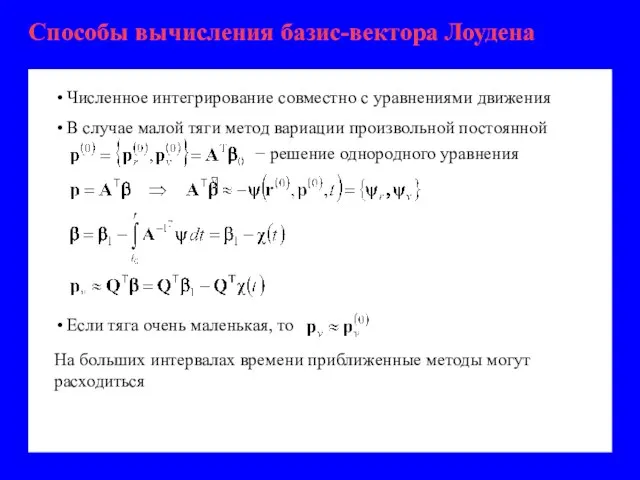
- 18. Способы вычисления базис-вектора Лоудена Численное интегрирование совместно с уравнениями движения На больших интервалах времени приближенные методы
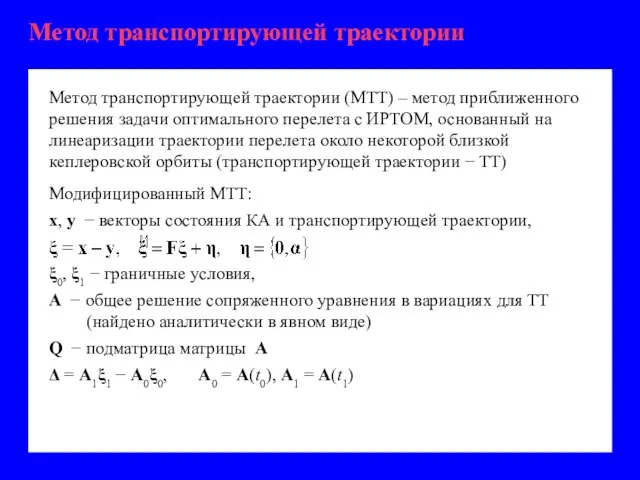
- 19. Метод транспортирующей траектории Метод транспортирующей траектории (МТТ) – метод приближенного решения задачи оптимального перелета с ИРТОМ,
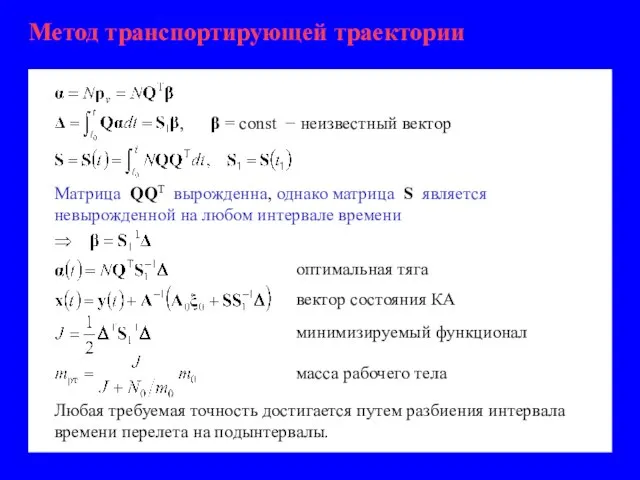
- 20. Метод транспортирующей траектории Матрица QQT вырожденна, однако матрица S является невырожденной на любом интервале времени оптимальная
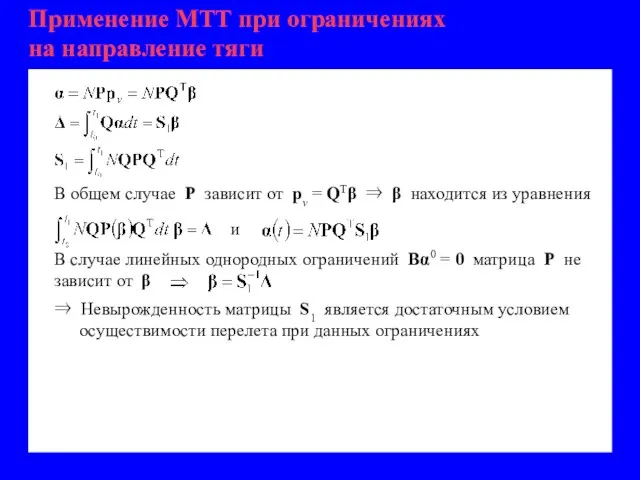
- 21. Применение МТТ при ограничениях на направление тяги В общем случае Р зависит от pv = QTβ
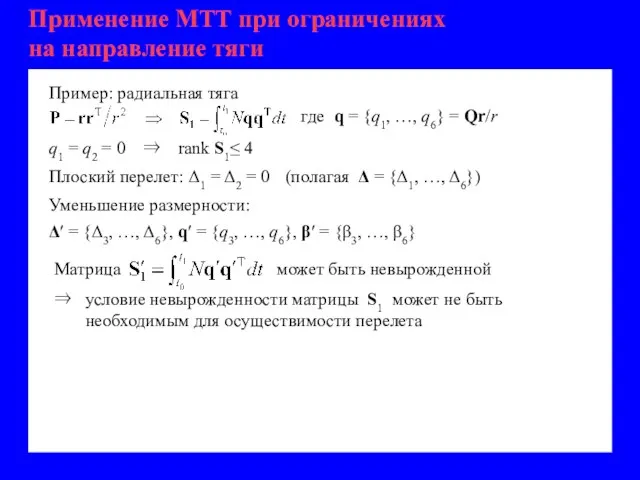
- 22. Пример: радиальная тяга где q = {q1, …, q6} = Qr/r q1 = q2 = 0
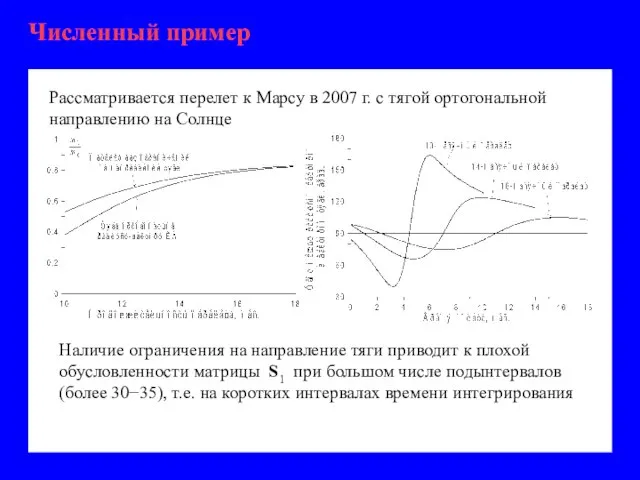
- 23. Численный пример Рассматривается перелет к Марсу в 2007 г. с тягой ортогональной направлению на Солнце Наличие
- 25. Скачать презентацию
Слайд 3ПСИОР
Оптимальная тяга
Функция переслючения
ИРТОМ
m = m(t) – масса КА
N = N(r, t) –
ПСИОР
Оптимальная тяга
Функция переслючения
ИРТОМ
m = m(t) – масса КА
N = N(r, t) –
Слайд 4Проекция вектора на множество
Проекция (абсолютная) вектора b на вектор a:
Проекция bA вектора
Проекция вектора на множество
Проекция (абсолютная) вектора b на вектор a:
Проекция bA вектора
Слайд 5Свойства проекций вектора на множество
Свойства проекций вектора на множество
Слайд 6Общий случай ограничений на направление тяги
Максимум функции Гамильтона достигается при
Матрица проектирует
Общий случай ограничений на направление тяги
Максимум функции Гамильтона достигается при
Матрица проектирует
Слайд 7Оптимальная тяга
Ограничения на направление тяги
ИРТОМ
ПСИОР
Отсутствие ограничений
Оптимальная тяга
Ограничения на направление тяги
ИРТОМ
ПСИОР
Отсутствие ограничений
Слайд 8Ограничение типа равенства
− делает систему автономной
Ограничение типа равенства
− делает систему автономной
Слайд 9Ограничение типа неравенства
Граница множества G: k компонент вектора g равны нулю, а
Ограничение типа неравенства
Граница множества G: k компонент вектора g равны нулю, а
Слайд 10Пусть для каждой пары gi, gj одновременное выполнение равенств
gi = 0, gj = 0
либо возможно лишь
Пусть для каждой пары gi, gj одновременное выполнение равенств
gi = 0, gj = 0
либо возможно лишь
Слайд 11Линейные ограничения типа равенства
G: Bα0 = c B = B(r, v, t),
Линейные ограничения типа равенства
G: Bα0 = c B = B(r, v, t),
Слайд 12Линейные ограничения типа неравенства
G: Bα0 ≥ c B = B(r, v, t),
Линейные ограничения типа неравенства
G: Bα0 ≥ c B = B(r, v, t),
Слайд 13Линейные однородные ограничения
− проективная матрица
Bα0 = 0 B = B(r, v, t)
Линейные однородные ограничения
− проективная матрица
Bα0 = 0 B = B(r, v, t)
Слайд 14Линейные однородные ограничения
типа неравенства
Bα0 ≥ 0 − телесный угол, ограниченный плоскостями
Линейные однородные ограничения
типа неравенства
Bα0 ≥ 0 − телесный угол, ограниченный плоскостями
Слайд 15Примеры линейных однородных ограничений
Примеры линейных однородных ограничений
Слайд 16Объединение множеств и смешанные ограничения
Приведенные результаты легко обобщаются на:
Объединение ограничивающих множеств G
Объединение множеств и смешанные ограничения
Приведенные результаты легко обобщаются на:
Объединение ограничивающих множеств G
Слайд 17Уравнения для базис-вектора Лоудена
Уравнения для базис-вектора Лоудена
Слайд 18Способы вычисления базис-вектора Лоудена
Численное интегрирование совместно с уравнениями движения
На больших интервалах времени
Способы вычисления базис-вектора Лоудена
Численное интегрирование совместно с уравнениями движения
На больших интервалах времени
Слайд 19Метод транспортирующей траектории
Метод транспортирующей траектории (МТТ) – метод приближенного решения задачи оптимального
Метод транспортирующей траектории
Метод транспортирующей траектории (МТТ) – метод приближенного решения задачи оптимального
Слайд 20Метод транспортирующей траектории
Матрица QQT вырожденна, однако матрица S является невырожденной на любом
Метод транспортирующей траектории
Матрица QQT вырожденна, однако матрица S является невырожденной на любом
Слайд 21Применение МТТ при ограничениях на направление тяги
В общем случае Р зависит от
Применение МТТ при ограничениях на направление тяги
В общем случае Р зависит от
Слайд 22Пример: радиальная тяга
где q = {q1, …, q6} = Qr/r
q1 = q2 = 0 ⇒ rank S1≤ 4
Плоский перелет: Δ1 = Δ2 = 0 (полагая Δ = {Δ1, …, Δ6})
Пример: радиальная тяга
где q = {q1, …, q6} = Qr/r
q1 = q2 = 0 ⇒ rank S1≤ 4
Плоский перелет: Δ1 = Δ2 = 0 (полагая Δ = {Δ1, …, Δ6})
Слайд 23Численный пример
Рассматривается перелет к Марсу в 2007 г. с тягой ортогональной направлению
Численный пример
Рассматривается перелет к Марсу в 2007 г. с тягой ортогональной направлению
 Односоставные предложения в лирике А. А. Фета
Односоставные предложения в лирике А. А. Фета Продвижение е-бренда в off-line среде
Продвижение е-бренда в off-line среде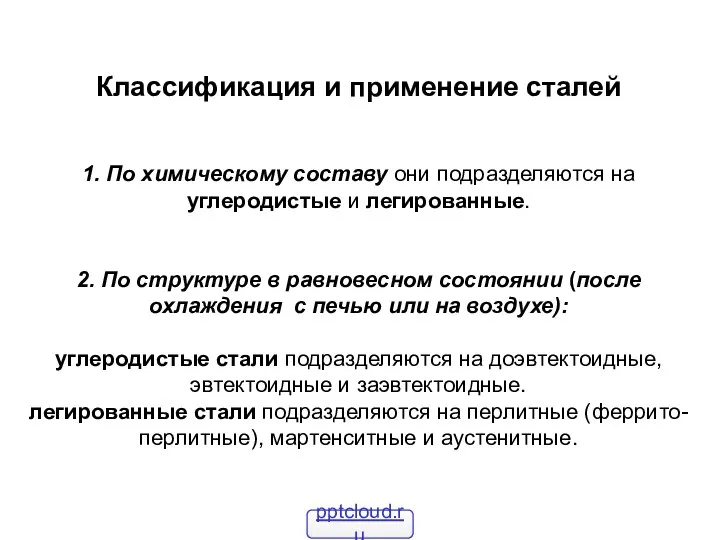 Чугуны и стали
Чугуны и стали 4
4 Народ России СААМЫ
Народ России СААМЫ Поэзия серебряного века. Модернизм – путь к новой гармонии
Поэзия серебряного века. Модернизм – путь к новой гармонии 10 заповедей Козьмы Пруткова
10 заповедей Козьмы Пруткова Составление эскизов разрезов. Составление эскизов фасадов
Составление эскизов разрезов. Составление эскизов фасадов Тема 17. Надежность эксплуатации, техническое обслуживание и ремонт торгового оборудования
Тема 17. Надежность эксплуатации, техническое обслуживание и ремонт торгового оборудования Преемственность ДОУ и школы
Преемственность ДОУ и школы Презентация на тему Образ Сергия Радонежского в искусстве
Презентация на тему Образ Сергия Радонежского в искусстве ПОДПИСКА
ПОДПИСКА ГИА-2013
ГИА-2013 ПРАЗДНИК СЛАВЯНСКОЙ ПИСЬМЕННОСТИ
ПРАЗДНИК СЛАВЯНСКОЙ ПИСЬМЕННОСТИ Радиоактивность. Альфа-, гамма- и бета- излучения
Радиоактивность. Альфа-, гамма- и бета- излучения Презентация на тему Биография "Велимир Хлебников"
Презентация на тему Биография "Велимир Хлебников"  Нумерация многозначных чисел (4 класс)
Нумерация многозначных чисел (4 класс) Паралимпийцы
Паралимпийцы ОХРАНА РАСТЕНИЙ Анохина Людмила Николаевна Гимназия№470 учитель начальных классов
ОХРАНА РАСТЕНИЙ Анохина Людмила Николаевна Гимназия№470 учитель начальных классов  Пономаренко Ліза_Веселка_13.11.2020
Пономаренко Ліза_Веселка_13.11.2020 Образцы заполнения документов по программе «Оптим»
Образцы заполнения документов по программе «Оптим» Общественная зона для обслуживания пассажиров
Общественная зона для обслуживания пассажиров Презентация на тему Культура и достопримечательности Греции
Презентация на тему Культура и достопримечательности Греции Презентация на тему Современные требования к уроку в рамках ФГОС
Презентация на тему Современные требования к уроку в рамках ФГОС Впровадження Державного стандарту базової і повної загальної середньої освіти
Впровадження Державного стандарту базової і повної загальної середньої освіти Презентация на тему Риторика
Презентация на тему Риторика  1С:УПРАВЛЕНИЕНЕБОЛЬШОЙ ФИРМОЙ 8
1С:УПРАВЛЕНИЕНЕБОЛЬШОЙ ФИРМОЙ 8 Эфирные масла
Эфирные масла