- Метод создания связных сцен из художественного видео

Содержание
- 2. Актуальность работы Создание связных сцен является промежуточным этапом анализа видео, его результаты могут использоваться для: упрощения
- 3. Цель и задачи работы Цель работы – разработка метода создания связных сцен из художественного видео. Задачи
- 4. Предметная область План – это набор кадров, непрерывно снятых с одной камеры без монтажных склеек Сцена
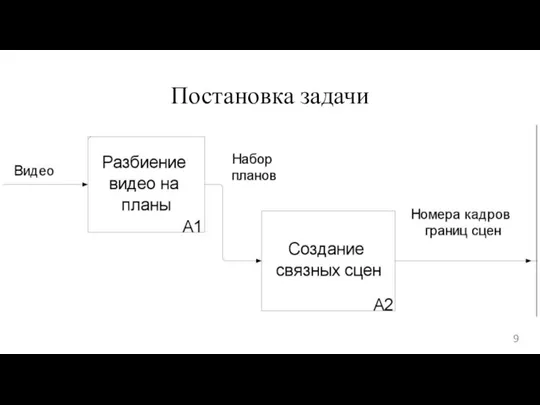
- 5. Постановка задачи 9
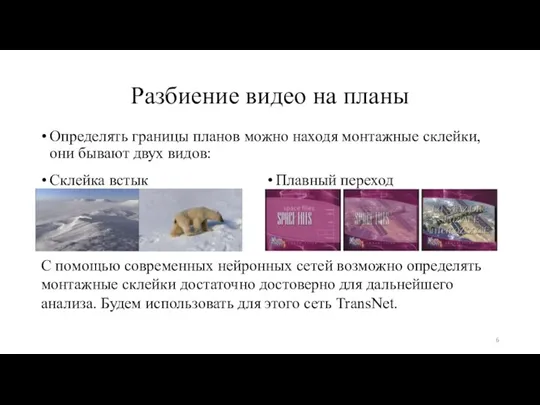
- 6. Разбиение видео на планы Определять границы планов можно находя монтажные склейки, они бывают двух видов: Склейка
- 7. Первый план первая сцена Первый план первая сцена Второй план первая сцена Третий план вторая сцена
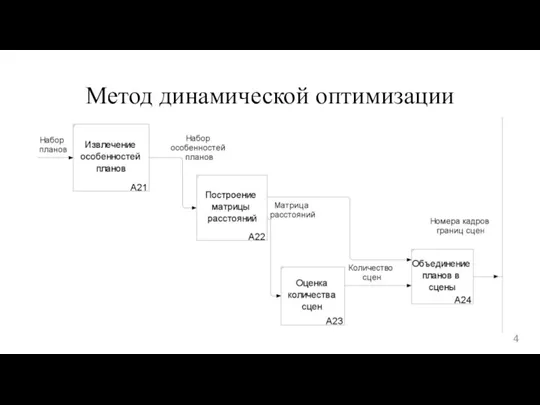
- 8. Метод динамической оптимизации 4
- 9. Особенности планов HSV гистограммы кадров как особенности: синий – цветовой тон, зелёный – насыщенность, красный -
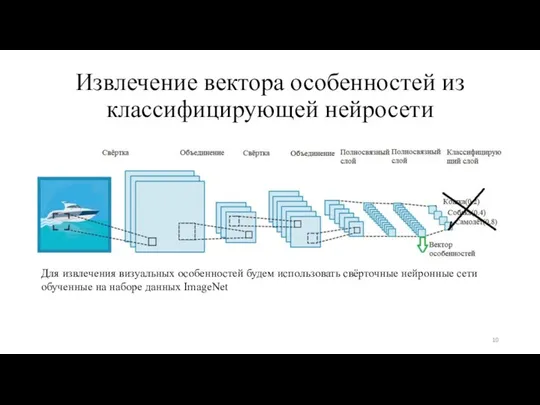
- 10. Извлечение вектора особенностей из классифицирующей нейросети Для извлечения визуальных особенностей будем использовать свёрточные нейронные сети обученные
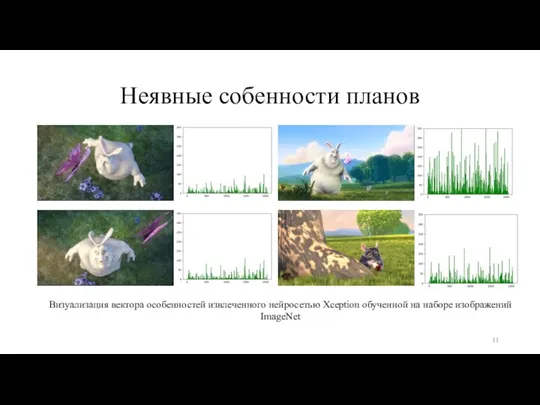
- 11. Неявные собенности планов Визуализация вектора особенностей извлеченного нейросетью Xception обученной на наборе изображений ImageNet
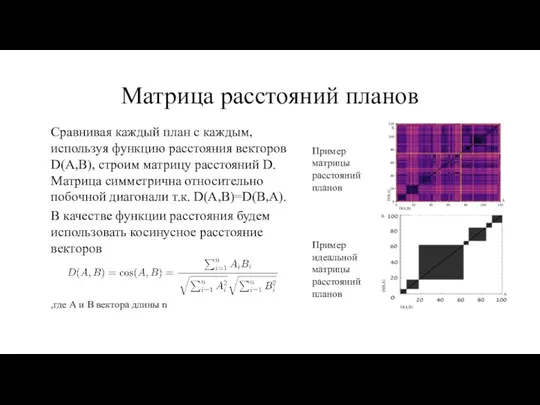
- 12. Матрица расстояний планов Пример матрицы расстояний планов В качестве функции расстояния будем использовать косинусное расстояние векторов
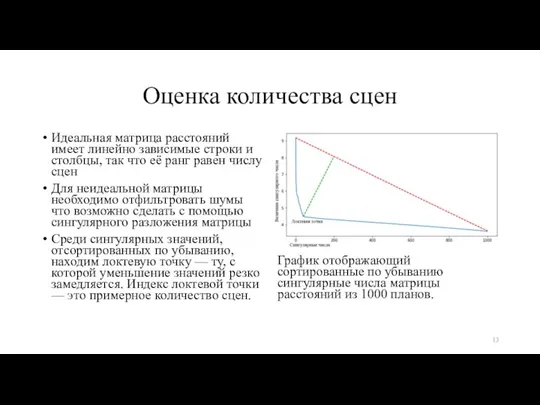
- 13. Оценка количества сцен Идеальная матрица расстояний имеет линейно зависимые строки и столбцы, так что её ранг
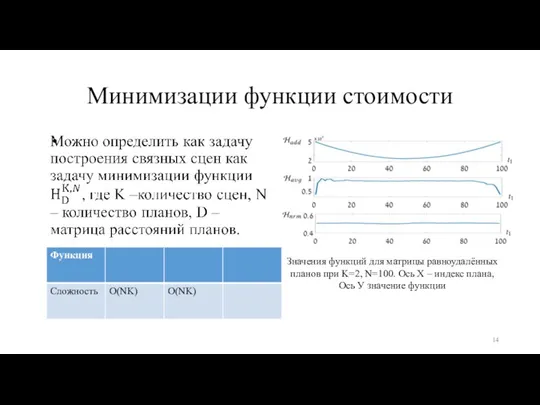
- 14. Минимизации функции стоимости Значения функций для матрицы равноудалённых планов при K=2, N=100. Ось Х – индекс
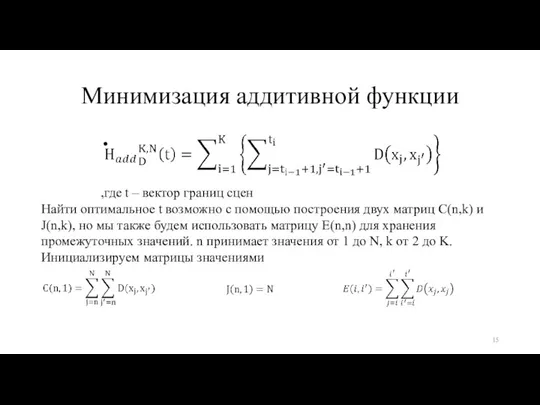
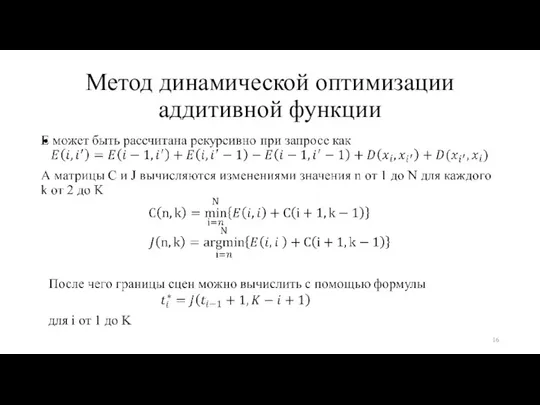
- 15. Минимизация аддитивной функции Найти оптимальное t возможно с помощью построения двух матриц C(n,k) и J(n,k), но
- 16. Метод динамической оптимизации аддитивной функции для i от 1 до K
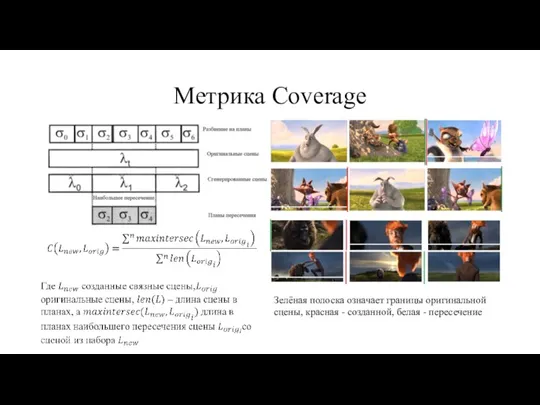
- 17. Метрика Coverage Зелёная полоска означает границы оригинальной сцены, красная - созданной, белая - пересечение
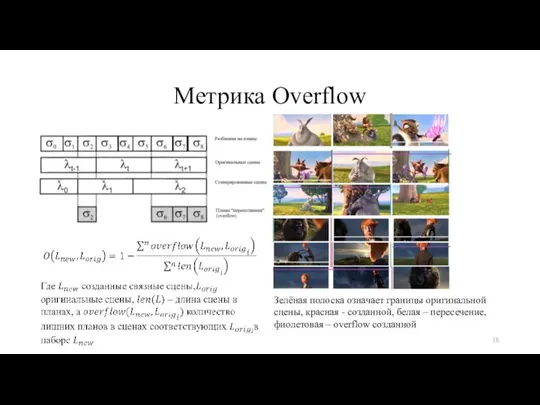
- 18. Метрика Overflow Зелёная полоска означает границы оригинальной сцены, красная - созданной, белая – пересечение, фиолетовая –
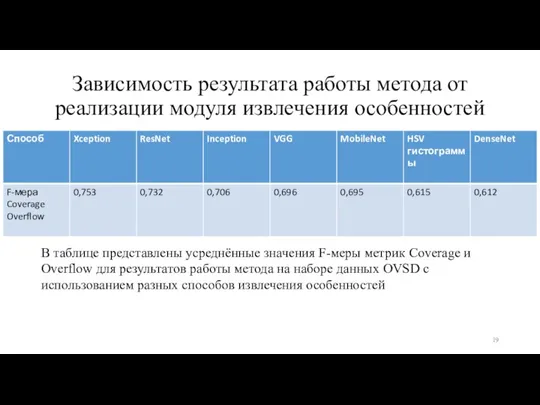
- 19. Зависимость результата работы метода от реализации модуля извлечения особенностей В таблице представлены усреднённые значения F-меры метрик
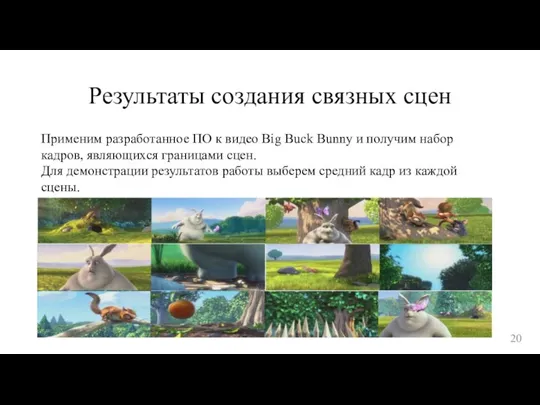
- 20. Результаты создания связных сцен Применим разработанное ПО к видео Big Buck Bunny и получим набор кадров,
- 21. Заключение В результате выполнения работы были решены поставленные задачи: проведён анализ предметной области, выделены основные подходы
- 23. Скачать презентацию
Слайд 2Актуальность работы
Создание связных сцен является промежуточным этапом анализа видео, его результаты могут
Актуальность работы
Создание связных сцен является промежуточным этапом анализа видео, его результаты могут
Слайд 3Цель и задачи работы
Цель работы – разработка метода создания связных сцен из
Цель и задачи работы
Цель работы – разработка метода создания связных сцен из
Слайд 4Предметная область
План – это набор кадров, непрерывно снятых с одной камеры без
Предметная область
План – это набор кадров, непрерывно снятых с одной камеры без

Слайд 5Постановка задачи
9
Постановка задачи
9
Слайд 6Разбиение видео на планы
Определять границы планов можно находя монтажные склейки, они бывают
Разбиение видео на планы
Определять границы планов можно находя монтажные склейки, они бывают
Слайд 7Первый план первая сцена
Первый план первая сцена
Второй план первая сцена
Третий план вторая
Первый план первая сцена
Первый план первая сцена
Второй план первая сцена
Третий план вторая
Слайд 8Метод динамической оптимизации
4
Метод динамической оптимизации
4
Слайд 9Особенности планов
HSV гистограммы кадров как особенности: синий – цветовой тон, зелёный –
Особенности планов
HSV гистограммы кадров как особенности: синий – цветовой тон, зелёный –

Слайд 10Извлечение вектора особенностей из классифицирующей нейросети
Для извлечения визуальных особенностей будем использовать свёрточные
Извлечение вектора особенностей из классифицирующей нейросети
Для извлечения визуальных особенностей будем использовать свёрточные
Слайд 11Неявные собенности планов
Визуализация вектора особенностей извлеченного нейросетью Xception обученной на наборе изображений
Неявные собенности планов
Визуализация вектора особенностей извлеченного нейросетью Xception обученной на наборе изображений
Слайд 12Матрица расстояний планов
Пример матрицы расстояний планов
В качестве функции расстояния будем использовать косинусное
Матрица расстояний планов
Пример матрицы расстояний планов
В качестве функции расстояния будем использовать косинусное
Слайд 13Оценка количества сцен
Идеальная матрица расстояний имеет линейно зависимые строки и столбцы, так
Оценка количества сцен
Идеальная матрица расстояний имеет линейно зависимые строки и столбцы, так
Слайд 14Минимизации функции стоимости
Значения функций для матрицы равноудалённых планов при K=2, N=100. Ось
Минимизации функции стоимости
Значения функций для матрицы равноудалённых планов при K=2, N=100. Ось
Слайд 15Минимизация аддитивной функции
Найти оптимальное t возможно с помощью построения двух матриц C(n,k)
Минимизация аддитивной функции
Найти оптимальное t возможно с помощью построения двух матриц C(n,k)
Слайд 16Метод динамической оптимизации аддитивной функции
для i от 1 до K
Метод динамической оптимизации аддитивной функции
для i от 1 до K
Слайд 17Метрика Coverage
Зелёная полоска означает границы оригинальной сцены, красная - созданной, белая -
Метрика Coverage
Зелёная полоска означает границы оригинальной сцены, красная - созданной, белая -
Слайд 18Метрика Overflow
Зелёная полоска означает границы оригинальной сцены, красная - созданной, белая –
Метрика Overflow
Зелёная полоска означает границы оригинальной сцены, красная - созданной, белая –
Слайд 19Зависимость результата работы метода от реализации модуля извлечения особенностей
В таблице представлены усреднённые
Зависимость результата работы метода от реализации модуля извлечения особенностей
В таблице представлены усреднённые
Слайд 20Результаты создания связных сцен
Применим разработанное ПО к видео Big Buck Bunny и
Результаты создания связных сцен
Применим разработанное ПО к видео Big Buck Bunny и
Слайд 21Заключение
В результате выполнения работы были решены поставленные задачи:
проведён анализ предметной области, выделены
Заключение
В результате выполнения работы были решены поставленные задачи:
проведён анализ предметной области, выделены
 Комиссии по улучшению инвестиционного климата, снижению административных барьеров и развитию малого и среднего предпринимательс
Комиссии по улучшению инвестиционного климата, снижению административных барьеров и развитию малого и среднего предпринимательс Правомерное поведение и правонарушения
Правомерное поведение и правонарушения Презентация на тему Музыка начала ХХ века
Презентация на тему Музыка начала ХХ века  Спортивный клуб Политехник
Спортивный клуб Политехник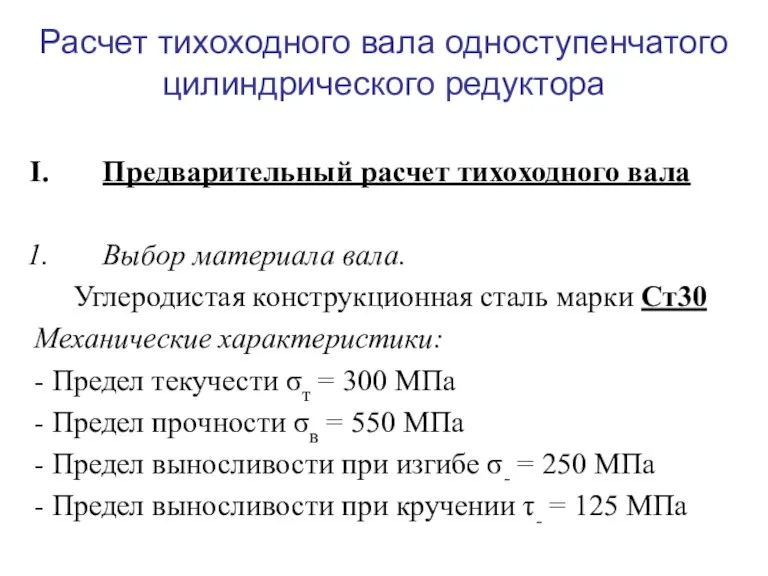 Расчет тихоходного вала одноступенчатого цилиндрического редуктора
Расчет тихоходного вала одноступенчатого цилиндрического редуктора "Новые подходы в области сервиса при ипотечном кредитовании"
"Новые подходы в области сервиса при ипотечном кредитовании" Понятие и признаки субъекта преступления в доктрине уголовного права
Понятие и признаки субъекта преступления в доктрине уголовного права Аномалии развития и заболевания плода
Аномалии развития и заболевания плода Презентация к конкурсу «Педагогический дебют»
Презентация к конкурсу «Педагогический дебют» Характер и особенности ментальности русского человека
Характер и особенности ментальности русского человека  Славянская мифология
Славянская мифология BusyFly platform. Запуск кикшеринга. Четыре бизнес-решения
BusyFly platform. Запуск кикшеринга. Четыре бизнес-решения Что такое химия
Что такое химия Что скрывается в кружке чая?
Что скрывается в кружке чая? Тема: «Коммуникационные технологии »
Тема: «Коммуникационные технологии » Кейсы - необходимый элемент образования
Кейсы - необходимый элемент образования Политические реформы 1860-1870-х годов
Политические реформы 1860-1870-х годов Всего семь нот, а столько славных песен
Всего семь нот, а столько славных песен DVIZH_Present_Perfect (1)
DVIZH_Present_Perfect (1) Влияние возраста пациентов на ангиогенные свойства мезенхимальных стволовых клеток жировой ткани
Влияние возраста пациентов на ангиогенные свойства мезенхимальных стволовых клеток жировой ткани Что такое электричество (4 класс)
Что такое электричество (4 класс) Свобода воли, нейронаука, пришельцы и роботы
Свобода воли, нейронаука, пришельцы и роботы Прялки
Прялки Подростковый возраст
Подростковый возраст Периодическая система химических элементов Д.И. Менделеева
Периодическая система химических элементов Д.И. Менделеева История немецкого театрального искусства в России
История немецкого театрального искусства в России Примеры задач с циклами while и repeat
Примеры задач с циклами while и repeat корпоративное мероприятие для…
корпоративное мероприятие для…