- Микропроцессорные информационноуправляющие системы

Содержание
- 2. ЛИТЕРАТУРА Микропроцессорные информационно-управляющие системы железнодорожного транспорта/А.В.Горелик, В.Ю.Горелик, А.Е.Ермаков, О.П.Ермакова. М.: РОАТ – 2011 г. 230 с.
- 3. Положительные свойства релейных систем 1. Высокая устойчивость к электромагнитным помехам (особенно возникающим при грозовых явлениях) и
- 4. Проблемы релейных систем 1. Большой износ технических средств 2. Медленное внедрение современных технических средств и технологий:
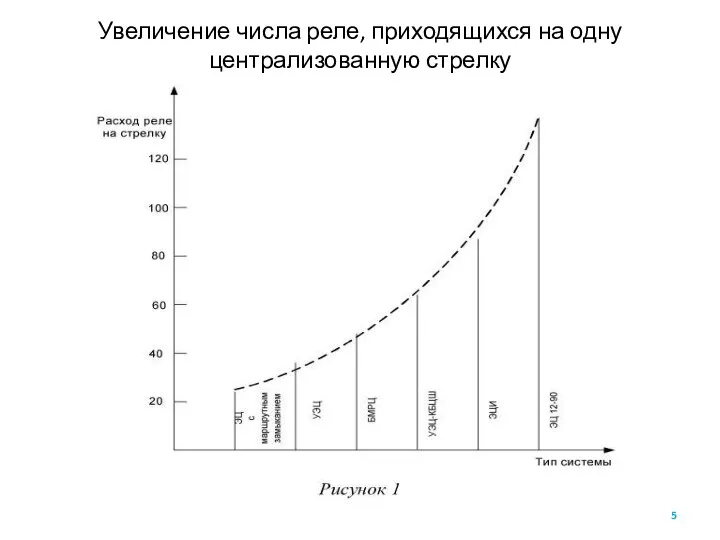
- 5. Увеличение числа реле, приходящихся на одну централизованную стрелку
- 6. Эффективность микропроцессорных СЖАТ Сокращение площадей служебно-технических помещений – размещение необходимой аппаратуры в малогабаритных компоновочных шкафах или
- 7. Проблемы внедрения МПИУС на сети железных дорог Основные причины, усложняющие внедрение новых микропроцессорных систем: - значительная
- 8. Микро-ЭВМ – основа информационно-управляющей системы МИКРОПРОЦЕССОР - самостоятельное или входящее в состав микро-ЭВМ устройство обработки информации,
- 9. МИКРОПРОЦЕССОРНАЯ СИСТЕМА – множество микропроцессорных элементов, находящихся в отношениях и связях друг с другом, образующих определенную
- 10. параллельный порт ввода – вывода; последовательный порт ввода – вывода; преобразователь напряжение – код (АЦП); преобразователь
- 11. Двоичные числа ("Binary digit" - двоичная цифра или бит) Сочетанием двоичных цифр (битов) можно представить любое
- 12. БИТЫ И БАЙТЫ Минимальной единицей информации в компьютере является бит. Бит может быть либо "выключен", при
- 13. Двоичная арифметика Микро-ЭВМ выполняет следующие арифметические действия: 0+0=0 1+0=1 1+1=10 Обратите внимание на перенос единичного бита
- 14. Шестнадцатеричное представление Рассмотрим следующие четыре байта: Двоичное: 0101 1001 0011 0101 1011 1001 1100 1110 Десятичное:
- 15. Шестнадцатеричное представление Таблица
- 17. Существует множество микро-ЭВМ с различными характеристиками и со временем их параметры фирмы-разработчики улучшают, но все они
- 19. Архитектура MCS-51 Блок управления предназначен для выработки синхронизирующих и управляющих сигналов. Формирует внутренние синхросигналы, которые определяют
- 20. Длительность каждой фазы равна периоду следования синхроимпульсов, который задается частотой кварцевого резонатора, подключаемого к выводам XTAL1
- 21. EPROM – память программ (4Кбайт); RAM – память данных (128 байт); PC – счётчик команд; DPTR
- 22. A – Аккумулятор B – регистр расширитель аккумулятора CU – устройство управления; IR – регистр команд;
- 23. TMOD – регистр режимов таймеров счетчиков; TCON – регистр управления статуса таймеров; TIMER0 – таймер 0;
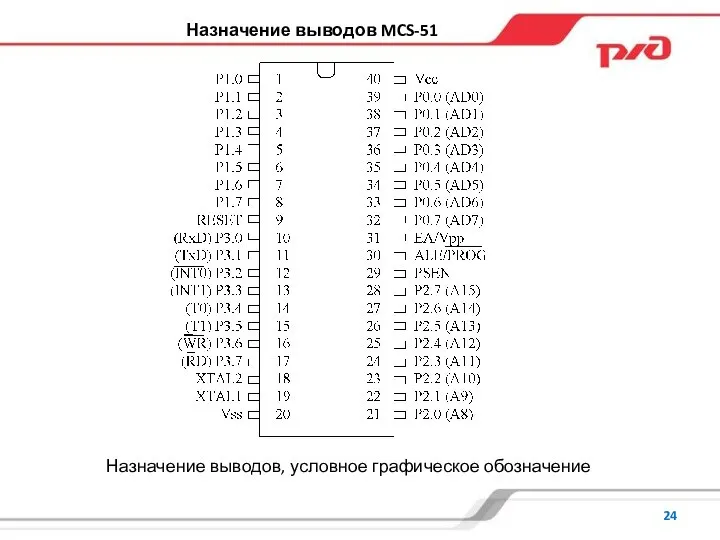
- 24. Назначение выводов MCS-51 Назначение выводов, условное графическое обозначение
- 25. Vss – потенциал общего провода ("земли"); Vcc – основное напряжение питания +5 В; XTAL1, XTAL2 –
- 26. P2 – восьми битный двунаправленный порт, аналогичный Р1; кроме того, выводы этого порта используются для выдачи
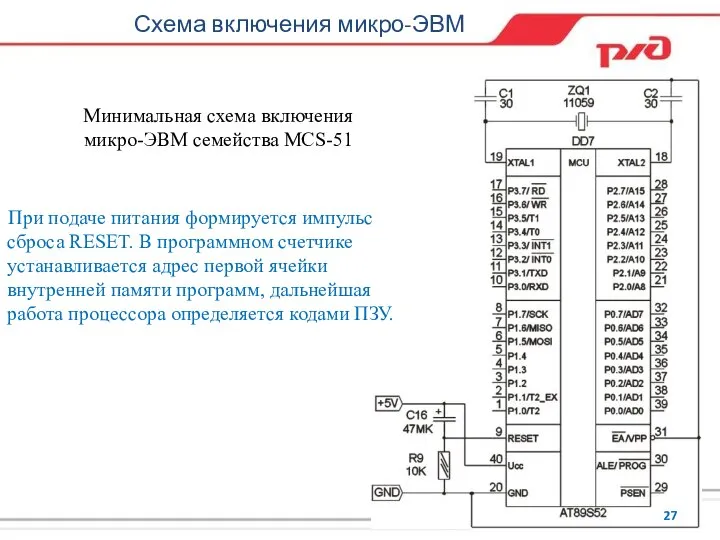
- 27. Схема включения микро-ЭВМ При подаче питания формируется импульс сброса RESET. В программном счетчике устанавливается адрес первой
- 28. Блок прерываний, таймеров и последовательного порта Система прерываний микроконтроллера 8051 Упрощенная схема прерываний микро-ЭВМ 8051 показана
- 29. Регистр масок прерывания (IE)
- 30. Регистр приоритетов прерываний (IP)
- 31. Особенности обслуживания прерываний Система прерываний формирует аппаратный вызов соответствующей подпрограммы обслуживания, если она не заблокирована одним
- 32. Таймеры / счетчики микро-ЭВМ семейства 8051 В базовых моделях семейства имеются два программируемых 16-битных таймера/счетчика (T/C0
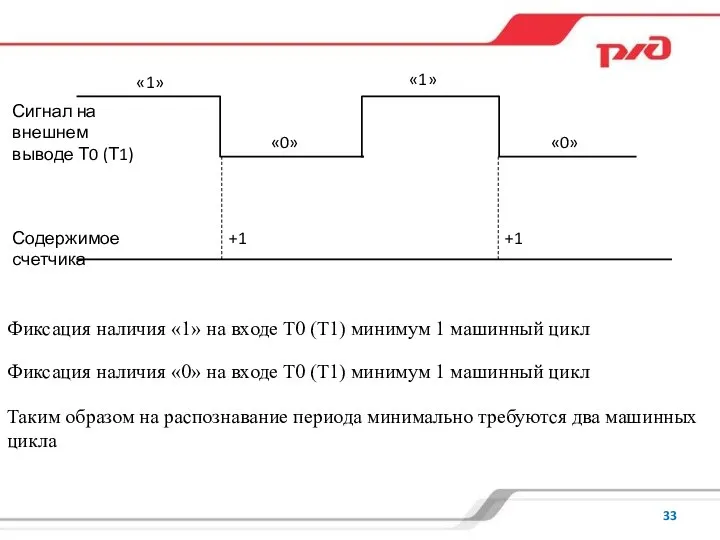
- 33. «1» «0» +1 +1 Сигнал на внешнем выводе Т0 (Т1) Содержимое счетчика «1» «0» Фиксация наличия
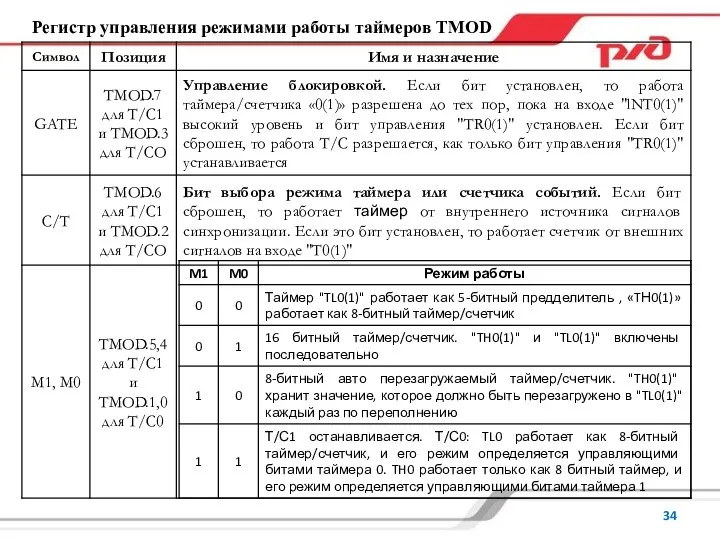
- 34. Регистр управления режимами работы таймеров TMOD
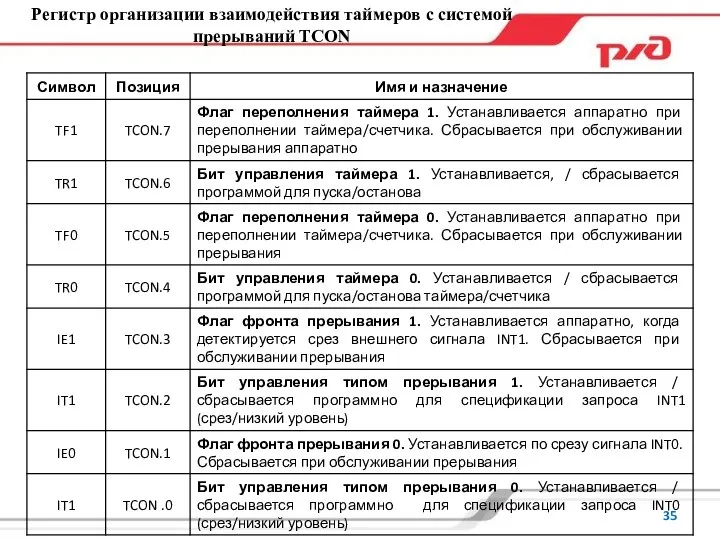
- 35. Регистр организации взаимодействия таймеров с системой прерываний TCON
- 36. Логика работы Т/С0 в режиме 0 В этом режиме Т/C функционирует как восьмиразрядный счетчик, на вход
- 37. & Х1 Х2 Y Y=X1*X2 1 Х1 Х2 Y Y=X1+X2 «И» «ИЛИ» 1 Х Y Y=X
- 38. (1) ТF0
- 39. Логика работы Т/С0 в режиме 1 Режим 1 аналогичен режиму 0, за исключением того, что доступны
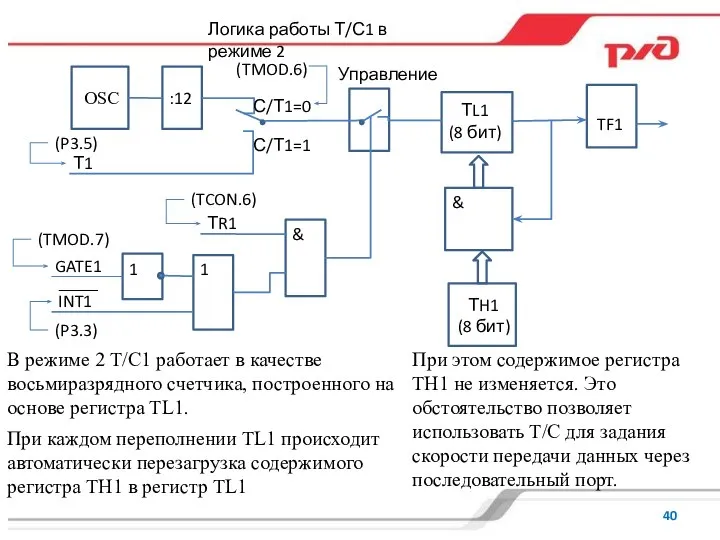
- 40. Логика работы Т/С1 в режиме 2 В режиме 2 Т/C1 работает в качестве восьмиразрядного счетчика, построенного
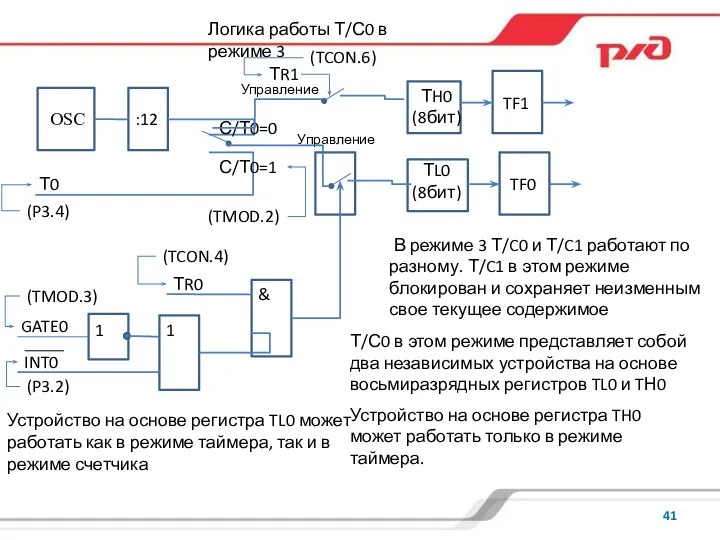
- 41. Логика работы Т/С0 в режиме 3 В режиме 3 Т/C0 и Т/C1 работают по разному. Т/C1
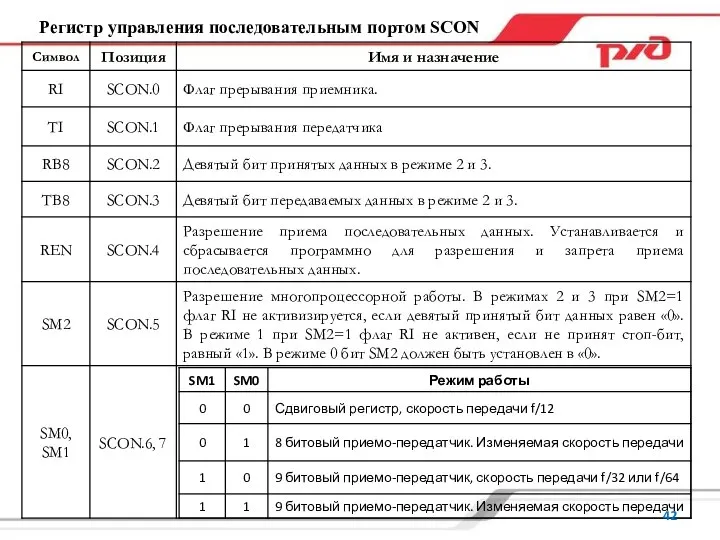
- 42. Регистр управления последовательным портом SCON
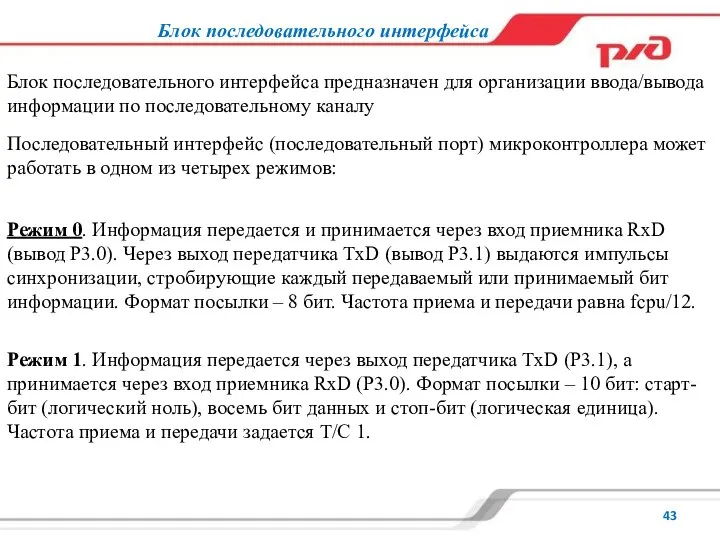
- 43. Блок последовательного интерфейса Блок последовательного интерфейса предназначен для организации ввода/вывода информации по последовательному каналу Последовательный интерфейс
- 44. RXD (P3.0) 1 2 3 4 5 6 7 8 TXD (P3.1) RXD (P3.0) 1 2
- 45. Режим 2. Информация передается через выход передатчика TxD (Р3.1), а принимается через вход приемника RxD (Р3.0).
- 46. RXD (P3.0) 1 2 3 4 5 6 7 8 TXD (P3.1) старт-бит «0» стоп-бит «1»
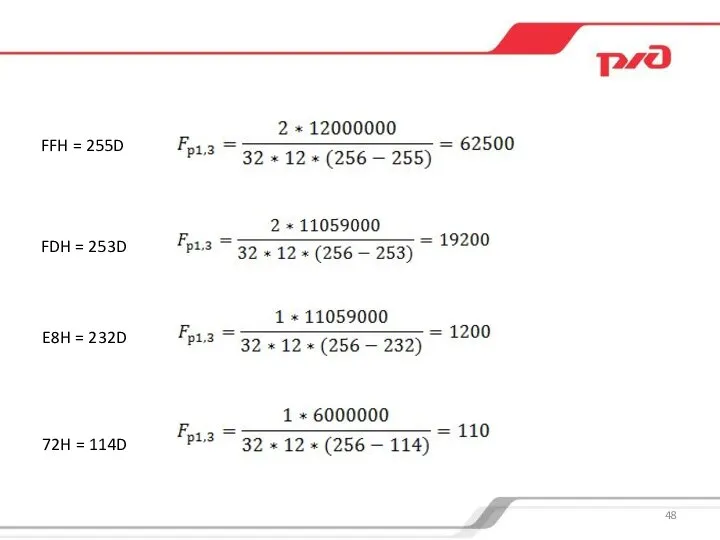
- 47. В таблице приведен ряд стандартных скоростей последовательного обмена и то, как они могут быть реализованы с
- 48. FFH = 255D FDH = 253D E8H = 232D 72H = 114D
- 49. Интерфейсы последовательного ввода вывода информации Электрические интерфейсы RS-232, RS-422, RS-423 (V.10), RS-485, токовая петля Последовательные интерфейсы
- 50. При этом обеспечивается полудуплексный режим связи, то есть, приемник и передатчик могут работать одновременно Недостаток этого
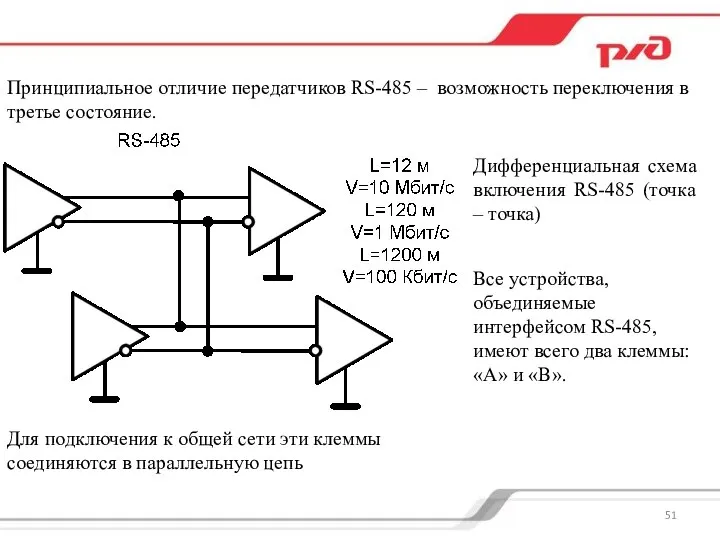
- 51. Принципиальное отличие передатчиков RS-485 – возможность переключения в третье состояние. Дифференциальная схема включения RS-485 (точка –
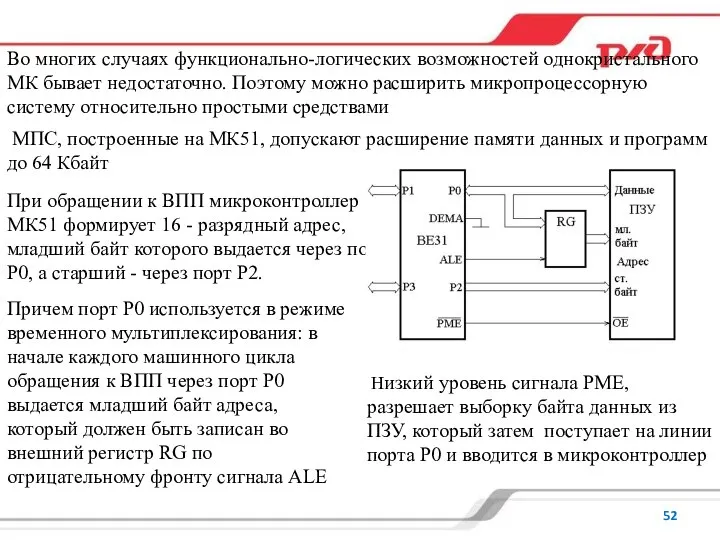
- 52. Во многих случаях функционально-логических возможностей однокристального МК бывает недостаточно. Поэтому можно расширить микропроцессорную систему относительно простыми
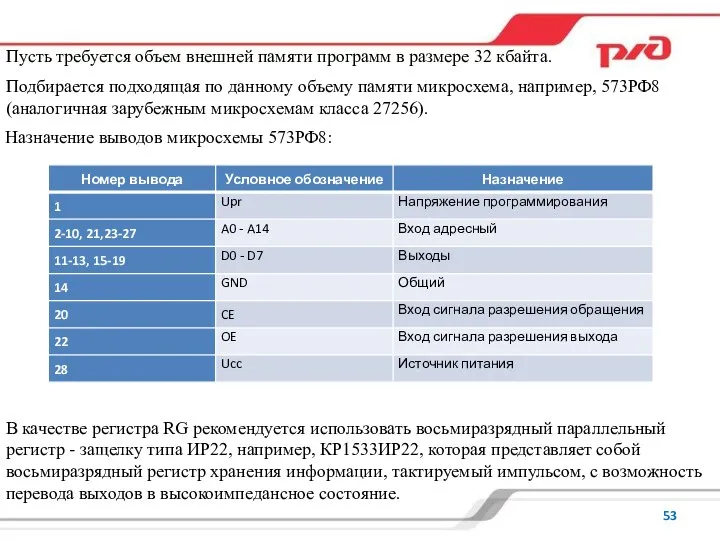
- 53. Пусть требуется объем внешней памяти программ в размере 32 кбайта. Подбирается подходящая по данному объему памяти
- 54. Высокоимпедансное состояние, высокоомное состояние, Z-состояние или состояние «Выключено» — состояние вывода цифровой микросхемы, при котором сопротивление
- 55. Назначение выводов микросхемы КР1533ИР22 приведено в таблице Таблица истинности микросхемы КР1533ИР22
- 56. 0000h 7FFFh 8000h FFFFh 0000 0000 0000 0000 0111 1111 1111 1111 1000 0000 0000 0000
- 57. Подключение ПЗУ 27С256 к MCS-51
- 58. В некоторых МПС, рассчитанных на обработку больших массивов данных, РПД может оказаться недостаточно. В этом случае
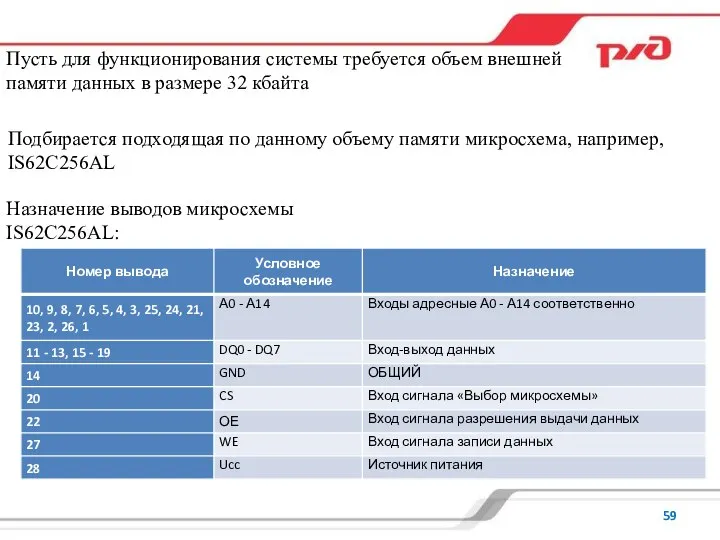
- 59. Пусть для функционирования системы требуется объем внешней памяти данных в размере 32 кбайта Подбирается подходящая по
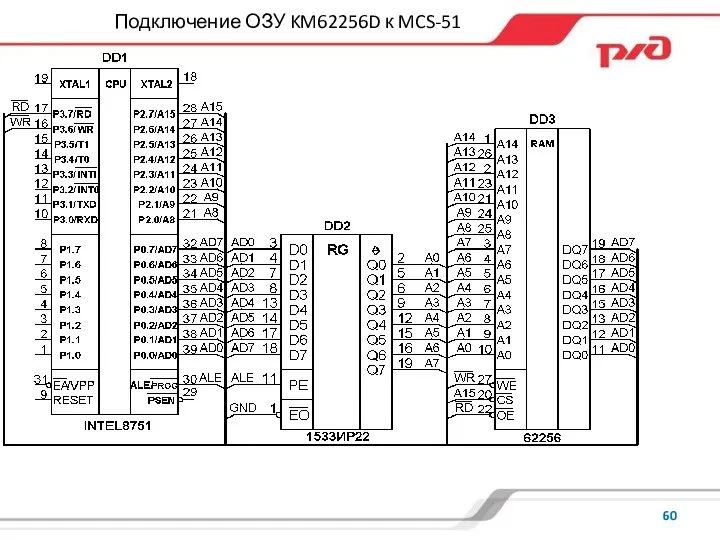
- 60. Подключение ОЗУ KM62256D к MCS-51
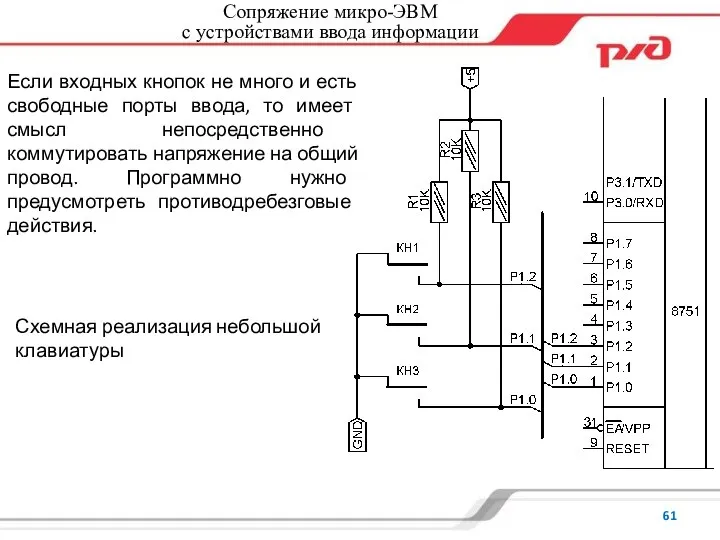
- 61. Сопряжение микро-ЭВМ с устройствами ввода информации Если входных кнопок не много и есть свободные порты ввода,
- 62. Устранение дребезга контактов При работе МК с датчиками, имеющими механические или электромеханические контакты (кнопки, клавиши, реле,
- 63. Т Т S R Q Q «1» S Q = 1 Q = 0 «1» R
- 64. Число N подбирается экспериментально, для каждого типа используемых контактов и лежит в пределах от 5 до
- 65. Для увеличения производительности МП обработка функции клавиатуры производится по прерыванию. Схемная реализация небольшой клавиатуры с использованием
- 66. Расширение каналов ввода/вывода информации Число линий ввода/вывода микроконтроллера МК-51 во многих реальных применениях оказывается недостаточным. В
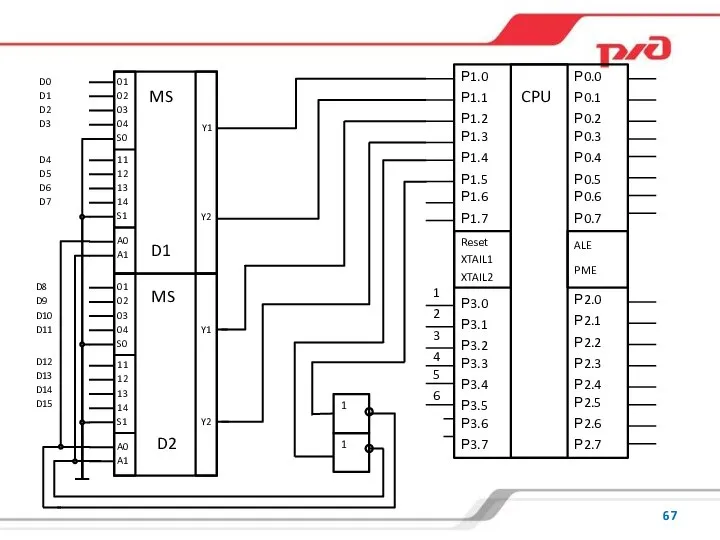
- 67. MS D1 D2
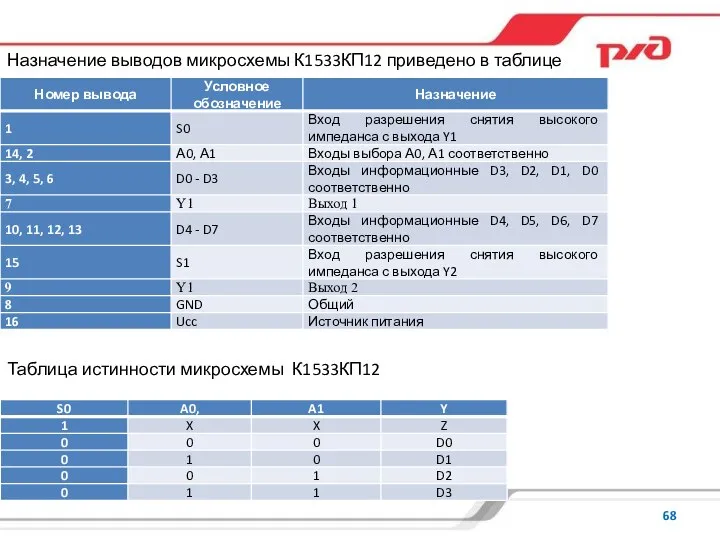
- 68. Назначение выводов микросхемы К1533КП12 приведено в таблице Таблица истинности микросхемы К1533КП12
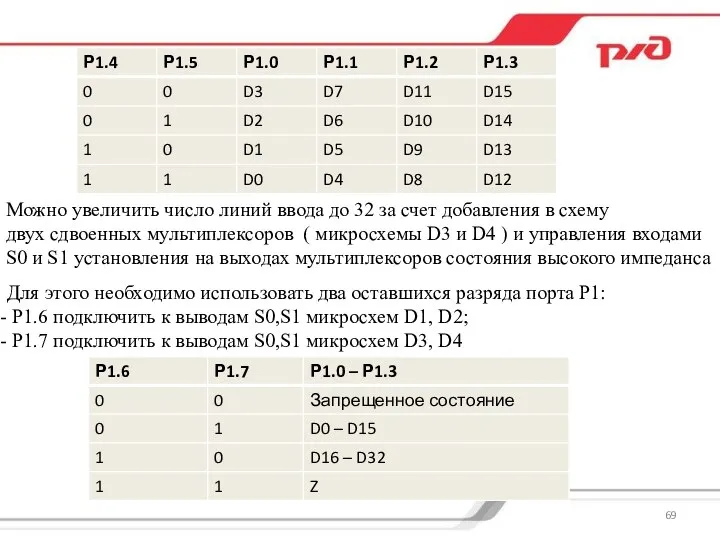
- 69. Можно увеличить число линий ввода до 32 за счет добавления в схему двух сдвоенных мультиплексоров (
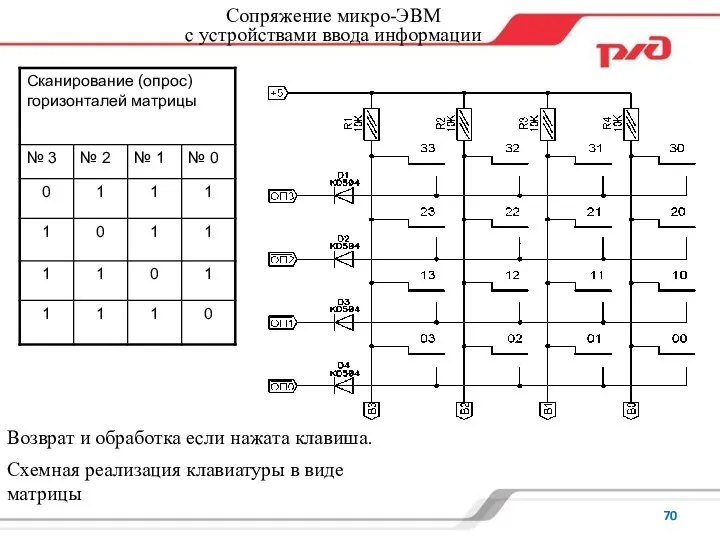
- 70. Сопряжение микро-ЭВМ с устройствами ввода информации Возврат и обработка если нажата клавиша. Схемная реализация клавиатуры в
- 71. Диоды предназначены для защиты токового ключа порта от замыкания на другие линии опроса в случае одновременного
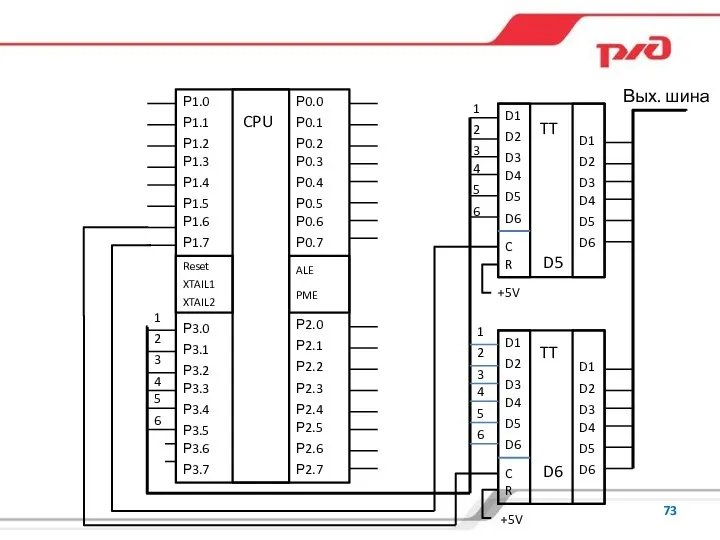
- 72. Расширение каналов вывода информации обычно достигается за счет использования нескольких регистров, стробируемых различными синхросигналами, либо за
- 73. Вых. шина D5 D6
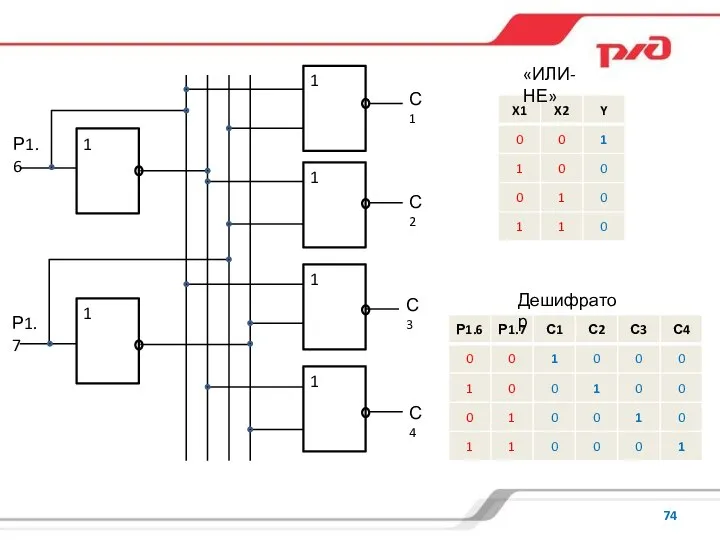
- 74. 1 1 1 1 1 1 С1 С2 С3 С4 Р1.6 Р1.7 «ИЛИ-НЕ» Дешифратор
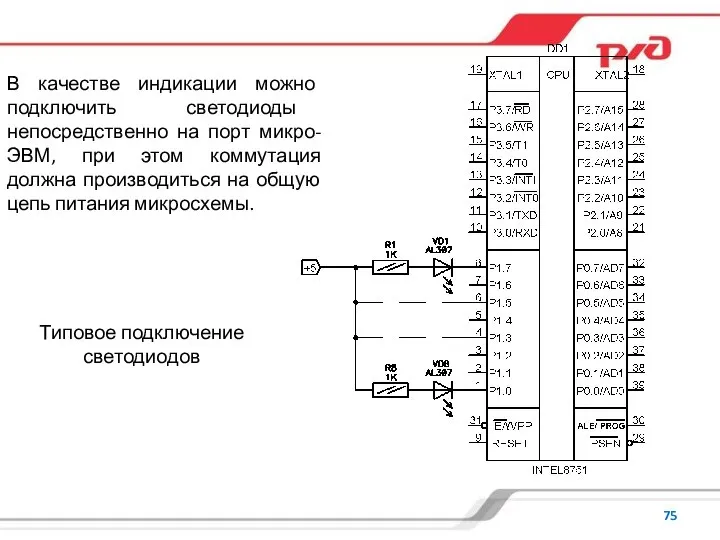
- 75. В качестве индикации можно подключить светодиоды непосредственно на порт микро-ЭВМ, при этом коммутация должна производиться на
- 76. Использование мощных транзисторов с коэффициентом передачи тока более 700 даёт возможность коммутации цепи током до нескольких
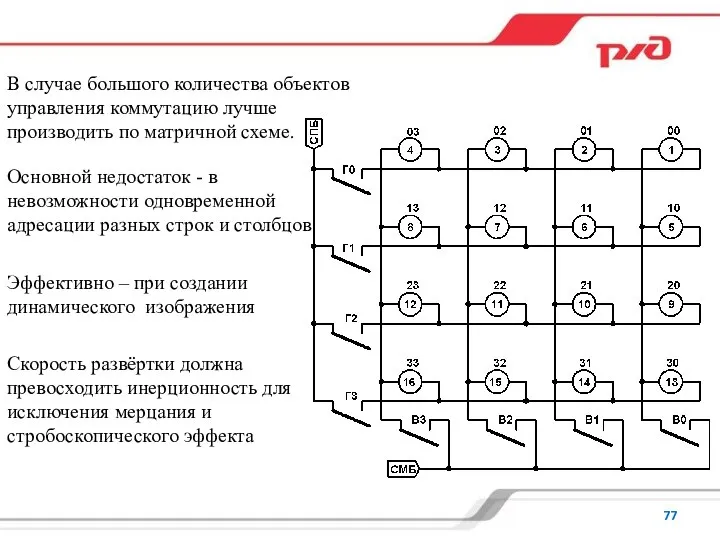
- 77. В случае большого количества объектов управления коммутацию лучше производить по матричной схеме. Основной недостаток - в
- 78. Каждое устройство в системе имеет свой уникальный адрес
- 79. Дешифратор адреса микропроцессорной информационно - управляющей системы В соответствии с сигналами на адресных входах появляется сигнал
- 80. ИД10 Преобразует четырехразрядный двоичный код, поступающий на входы А0 - А3 в сигнал низкого уровня, появляющийся
- 82. Эту же микросхему можно использовать как дешифратор трехразрядного кода на восемь выходов. Для этого следует соединить
- 83. Дешифратор адреса микропроцессорной информационно - управляющей системы В случае когда дешифратор адреса является общим для устройств
- 84. Во многих применениях МК-51 необходимо сформировать импульс заданной длительности на той или иной линии порта. Обычно
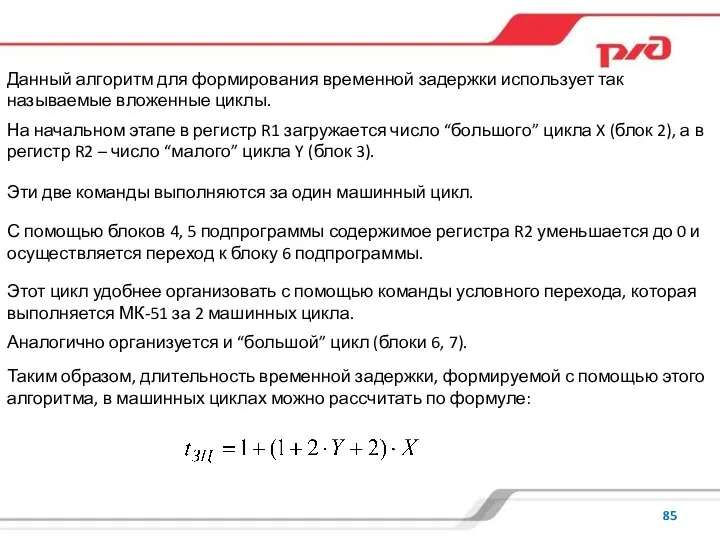
- 85. Данный алгоритм для формирования временной задержки использует так называемые вложенные циклы. На начальном этапе в регистр
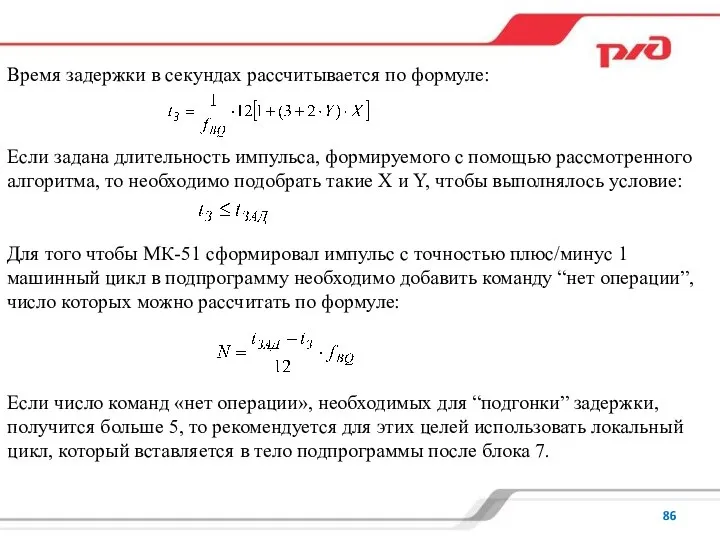
- 86. Время задержки в секундах рассчитывается по формуле: Если задана длительность импульса, формируемого с помощью рассмотренного алгоритма,
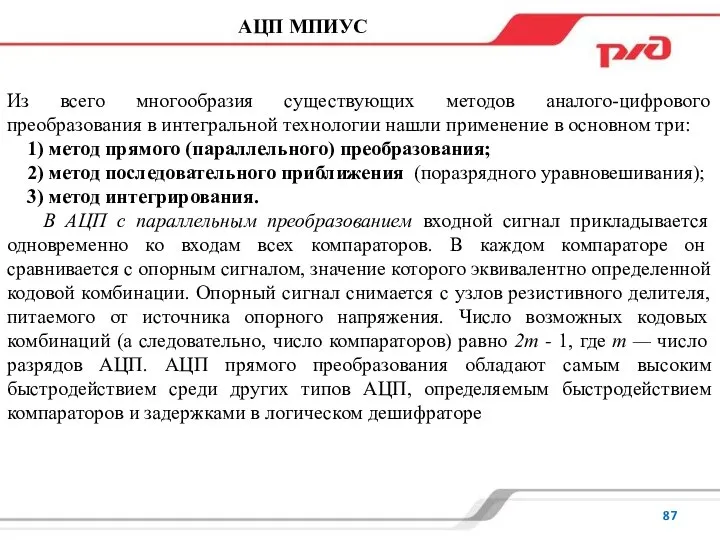
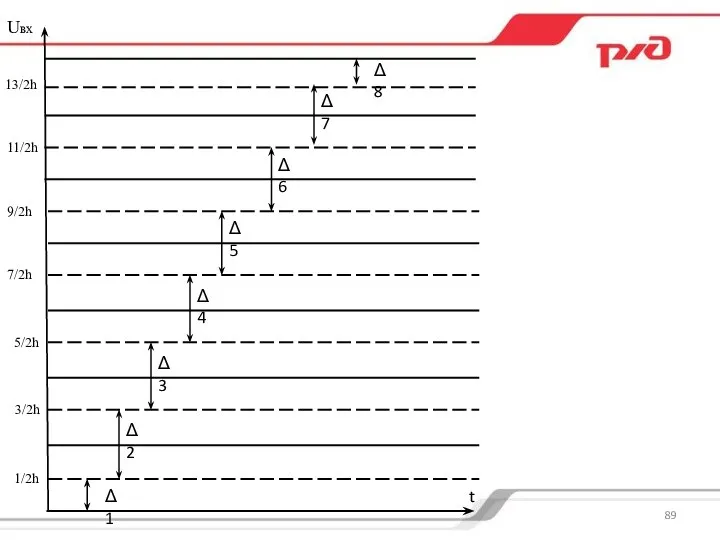
- 87. АЦП МПИУС Из всего многообразия существующих методов аналого-цифрового преобразования в интегральной технологии нашли применение в основном
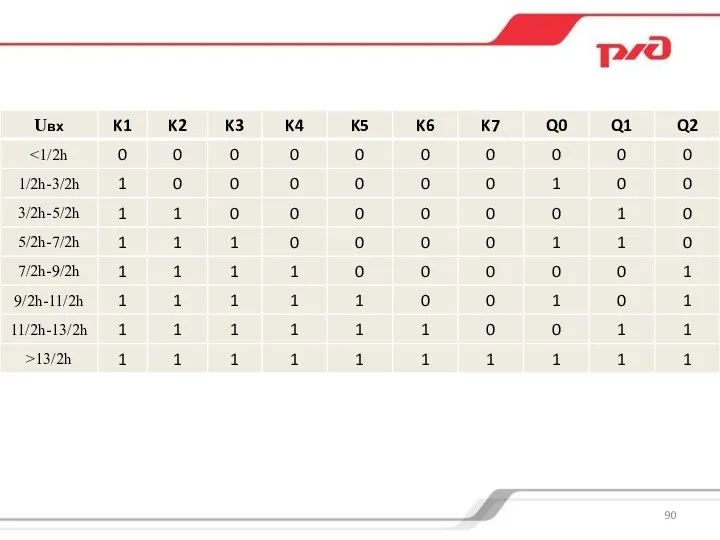
- 88. Недостатком их является необходимость в большом количестве компараторов. Так, для 8-разрядного АЦП требуется 255 компараторов. Это
- 89. Uвх 13/2h 11/2h 9/2h 7/2h 5/2h 3/2h 1/2h Δ1 Δ6 Δ7 Δ8 Δ4 Δ5 Δ3 Δ2
- 91. АЦП последовательного приближения состоит из следующих узлов: 1. Компаратор. Он сравнивает входную величину и текущее значение
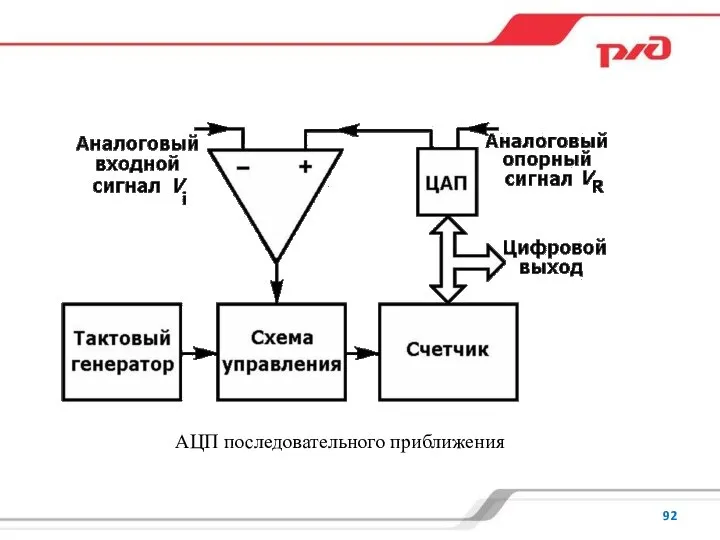
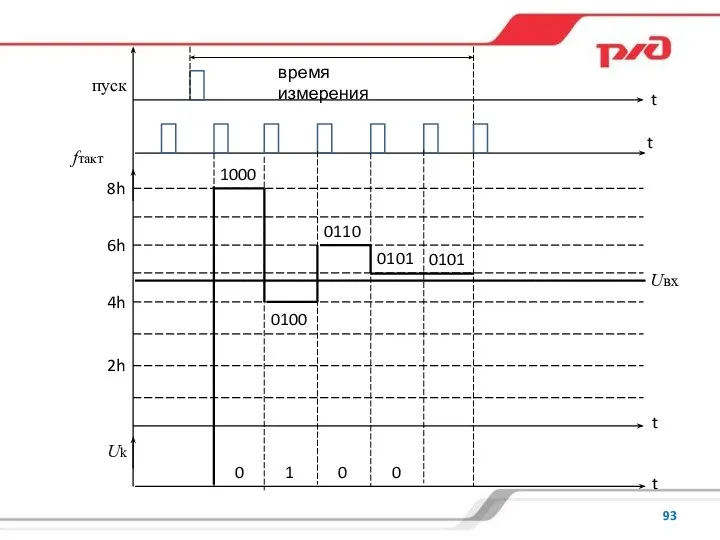
- 92. АЦП последовательного приближения
- 93. пуск fтакт 2h 4h 6h 8h Uвх Uk t t t t время измерения 1000 0100
- 94. Наиболее простыми по структуре среди интегрирующих преобразователей являются АЦП с преобразованием напряжения в частоту, построенные на
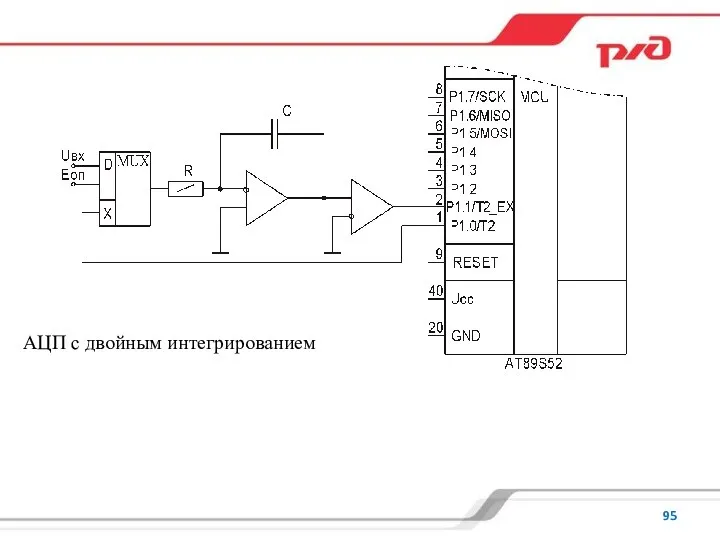
- 95. АЦП с двойным интегрированием
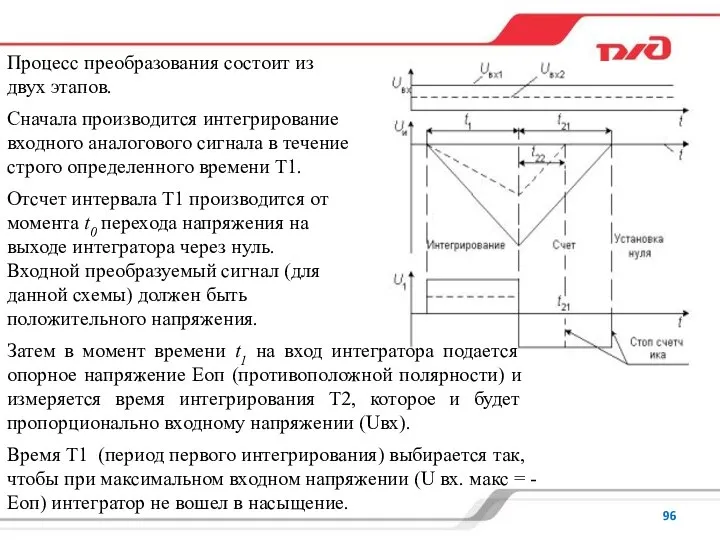
- 96. Процесс преобразования состоит из двух этапов. Сначала производится интегрирование входного аналогового сигнала в течение строго определенного
- 97. Время первого интегрирования (постоянное) Время второго интегрирования, где n2 - содержимое счетчика после окончания стадии счета
- 98. Цифро-аналоговые преобразователи Цифро-аналоговый преобразователь (ЦАП) предназначен для автоматического преобразования входных величин, представленных числовыми кодами, в соответствующие
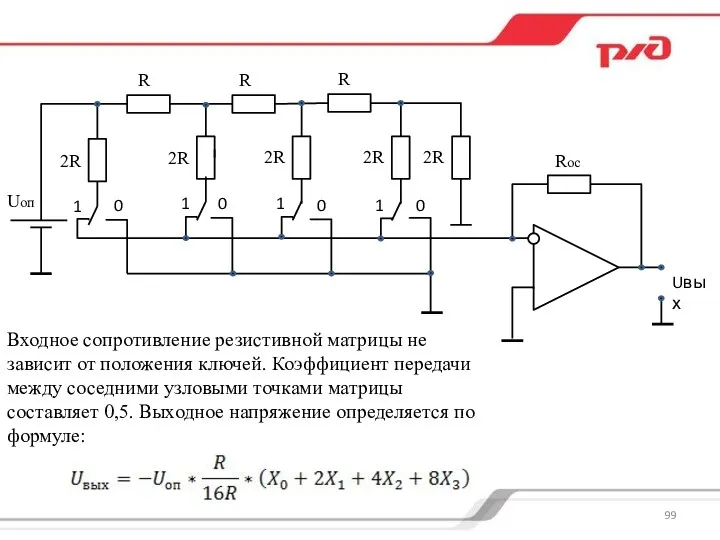
- 99. Uвых R Roc R R 2R 2R 2R 2R 2R 0 0 0 0 1 1
- 100. Классификация микропроцессорных информационно-управляющих систем на железнодорожном транспорте К основным таким системам относятся: автоматизированные системы управления и
- 101. Основные преимущества микропроцессорных систем 1. Более высокий уровень надежности 2. Наличие встроенного диагностического контроля состояния аппаратных
- 102. Обеспечение безопасности в микропроцессорных информационно-управляющих системах Недостатки полупроводниковой элементной базы по сравнению с релейной : 1.
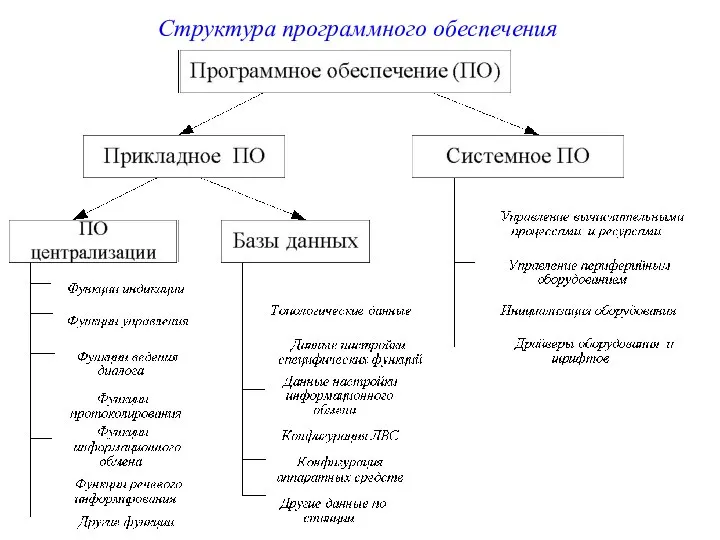
- 103. Структура программного обеспечения
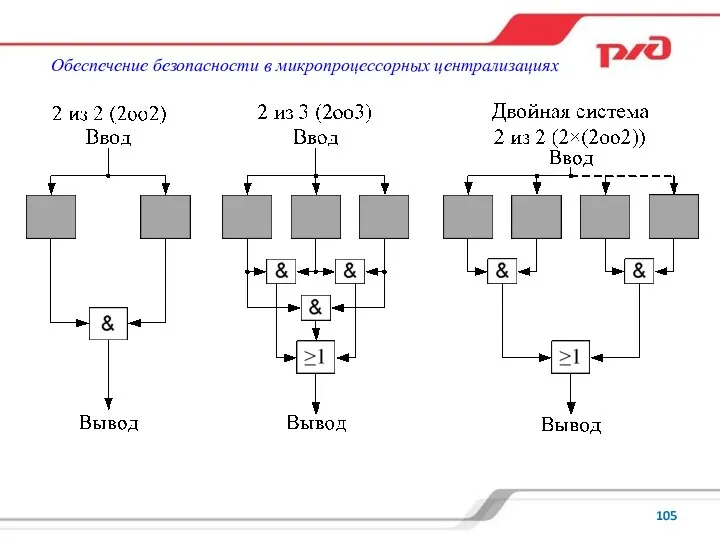
- 104. Обеспечение безопасности в микропроцессорных системах: 1. Избыточность позволяет исключить случайные ошибки в микропроцессорных комплексах. Пример аппаратной
- 105. Обеспечение безопасности в микропроцессорных централизациях
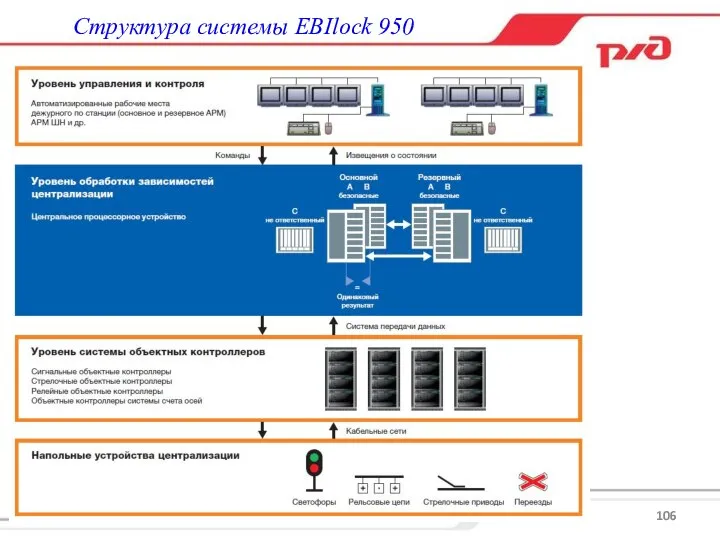
- 106. Структура системы EBIlock 950
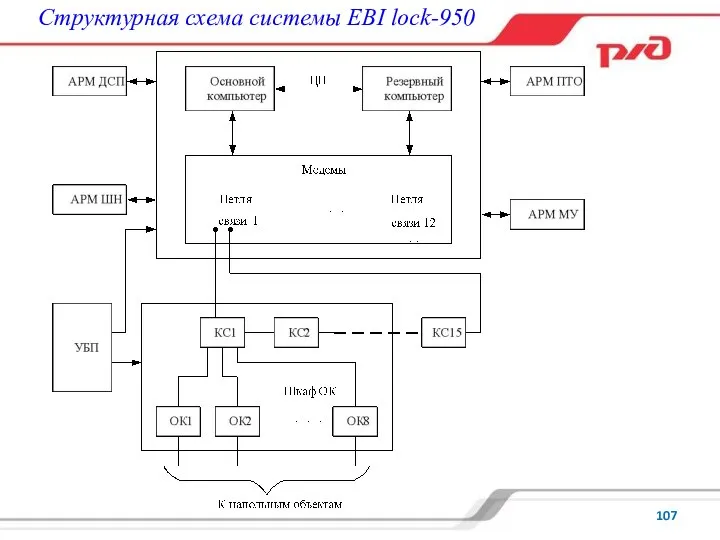
- 107. Структурная схема системы EBI lock-950
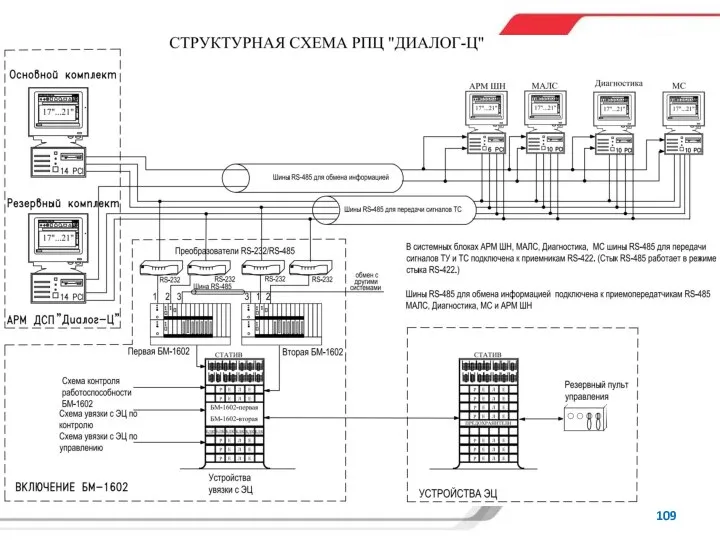
- 108. Одним из перспективных направлений перехода на компьютерные средства в устройствах станционной автоматики является применение релейно-компьютерных или
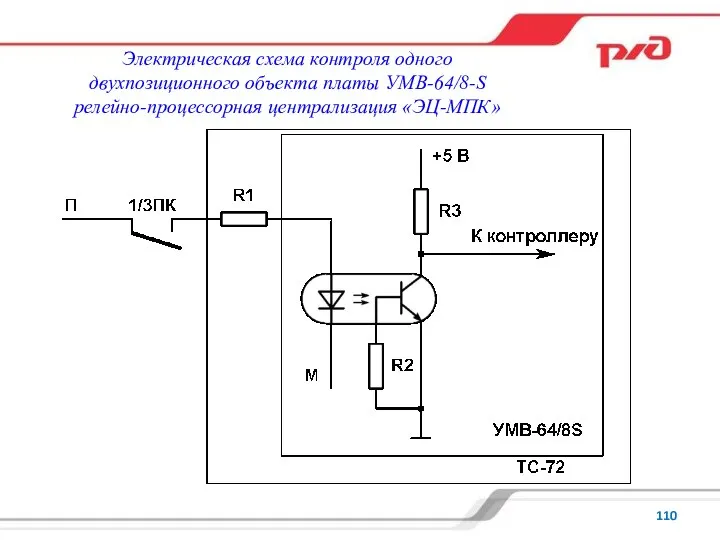
- 110. Электрическая схема контроля одного двухпозиционного объекта платы УМВ-64/8-S релейно-процессорная централизация «ЭЦ-МПК»
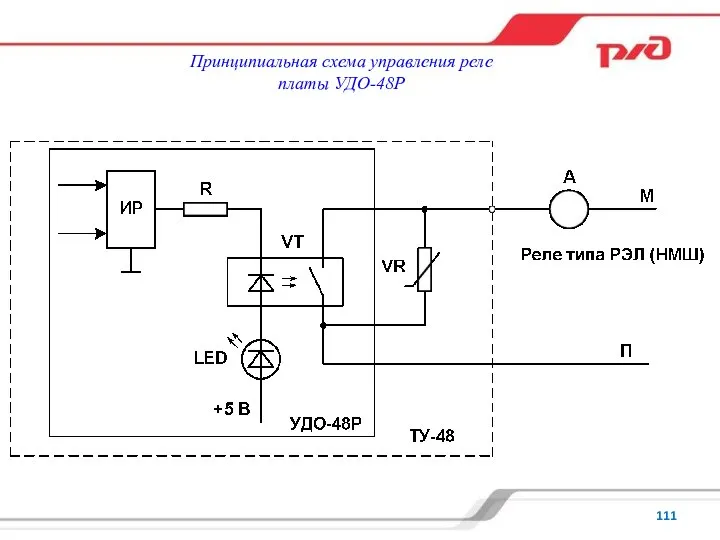
- 111. Принципиальная схема управления реле платы УДО-48P
- 112. К системам диспетчерского управления движением поездов относится диспетчерская централизация (ДЦ) Диспетчерская централизация применяется для управления из
- 113. 2. Контроль положения и свободности стрелок и изолированных участков, занятости перегонов и путей на станциях, индикацию
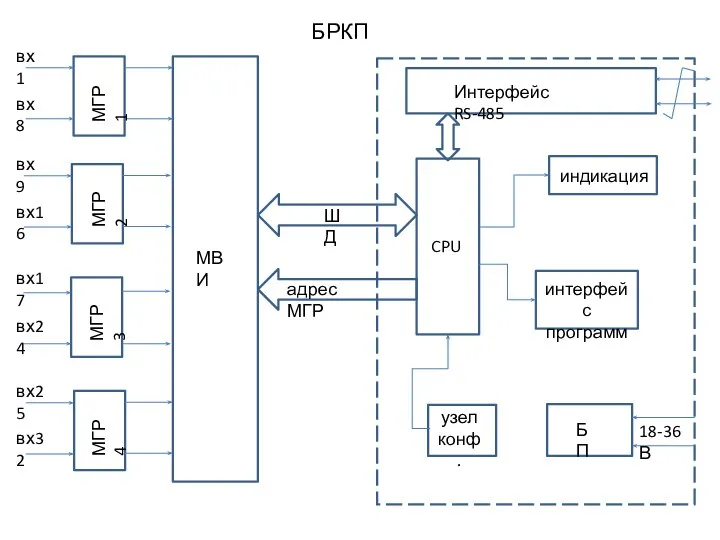
- 116. БРКП МГР 1 МГР 2 МГР 3 МГР 4 МВИ вх1 вх8 вх9 вх16 вх17 вх24
- 117. Структурная схема БКПМ ЦП G5066 COM1 COM2 модем модем модем Стык В 4 4 Стык А
- 118. Подключение БРКП к БКПМ 2 БКПМ расш. RS-485 БРКП1 БРКП2 БРКП32 к БРКП
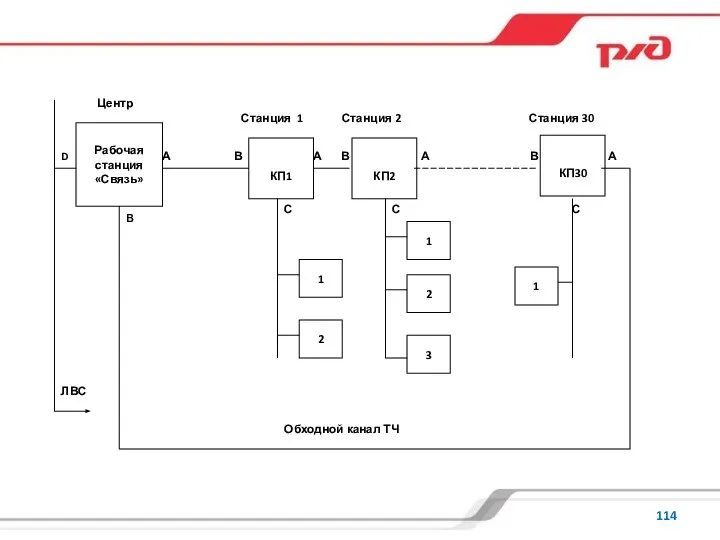
- 119. СПД-ЛП 1. Сервер сигналов - формирует сигналы запроса на линейные пункты; принимает информацию о состоянии объектов
- 120. Р С МС релейная Пульт ДСП Rогр +5V выход
- 121. МЦП-2
- 122. Дешифратор адреса Х1 Х2 Z Y=X1 (X2=0) Y=1 (X2=1) Х1 Х2 & Y=X1*X2 Х1 Х2 1
- 124. 1 1 1 1 1 1 1 0 0 1 1
- 125. 0 1 1 0 1 1 0 0 0 0 0
- 127. Скачать презентацию
Слайд 2ЛИТЕРАТУРА
Микропроцессорные информационно-управляющие системы железнодорожного
транспорта/А.В.Горелик, В.Ю.Горелик, А.Е.Ермаков, О.П.Ермакова. М.: РОАТ –
ЛИТЕРАТУРА
Микропроцессорные информационно-управляющие системы железнодорожного
транспорта/А.В.Горелик, В.Ю.Горелик, А.Е.Ермаков, О.П.Ермакова. М.: РОАТ –
Слайд 3Положительные свойства релейных систем
1. Высокая устойчивость к электромагнитным помехам (особенно
возникающим при
Положительные свойства релейных систем
1. Высокая устойчивость к электромагнитным помехам (особенно
возникающим при
Слайд 4Проблемы релейных систем
1. Большой износ технических средств
2. Медленное внедрение современных технических средств
Проблемы релейных систем
1. Большой износ технических средств
2. Медленное внедрение современных технических средств
Слайд 5Увеличение числа реле, приходящихся на одну централизованную стрелку
Увеличение числа реле, приходящихся на одну централизованную стрелку
Слайд 6Эффективность микропроцессорных СЖАТ
Сокращение площадей служебно-технических помещений – размещение
необходимой аппаратуры в малогабаритных
Эффективность микропроцессорных СЖАТ
Сокращение площадей служебно-технических помещений – размещение
необходимой аппаратуры в малогабаритных
Слайд 7Проблемы внедрения МПИУС на сети железных дорог
Основные причины, усложняющие внедрение новых микропроцессорных
Проблемы внедрения МПИУС на сети железных дорог
Основные причины, усложняющие внедрение новых микропроцессорных
Слайд 8Микро-ЭВМ – основа информационно-управляющей системы
МИКРОПРОЦЕССОР - самостоятельное или входящее в состав
Микро-ЭВМ – основа информационно-управляющей системы
МИКРОПРОЦЕССОР - самостоятельное или входящее в состав
Слайд 9МИКРОПРОЦЕССОРНАЯ СИСТЕМА – множество микропроцессорных элементов, находящихся в отношениях и связях друг
МИКРОПРОЦЕССОРНАЯ СИСТЕМА – множество микропроцессорных элементов, находящихся в отношениях и связях друг
Слайд 10 параллельный порт ввода – вывода;
последовательный порт ввода – вывода;
преобразователь
параллельный порт ввода – вывода;
последовательный порт ввода – вывода;
преобразователь

Слайд 11Двоичные числа
("Binary digit" - двоичная цифра или бит)
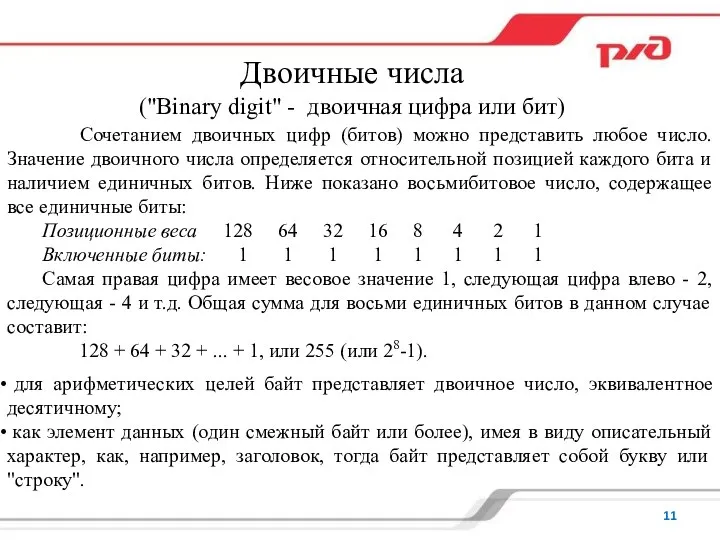
Сочетанием двоичных цифр
Двоичные числа
("Binary digit" - двоичная цифра или бит)
Сочетанием двоичных цифр
Слайд 12БИТЫ И БАЙТЫ
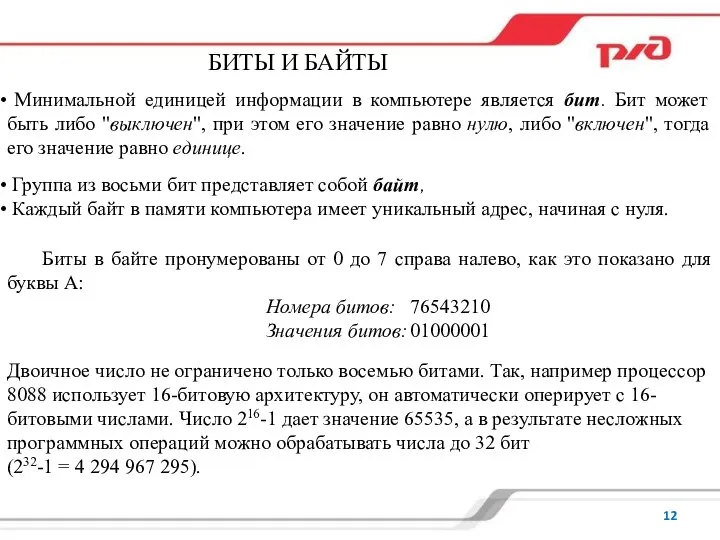
Минимальной единицей информации в компьютере является бит. Бит
БИТЫ И БАЙТЫ
Минимальной единицей информации в компьютере является бит. Бит
Слайд 13Двоичная арифметика
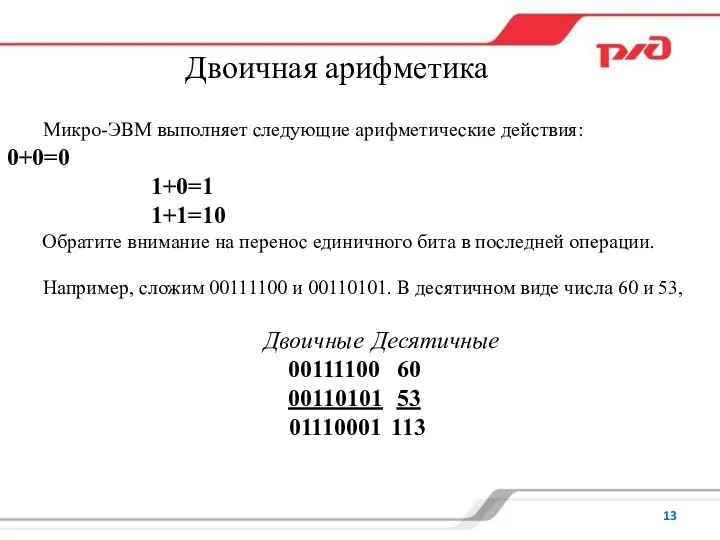
Микро-ЭВМ выполняет следующие арифметические действия: 0+0=0
1+0=1
1+1=10
Обратите внимание на перенос единичного бита в
Двоичная арифметика
Микро-ЭВМ выполняет следующие арифметические действия: 0+0=0
1+0=1
1+1=10
Обратите внимание на перенос единичного бита в
Слайд 14Шестнадцатеричное представление
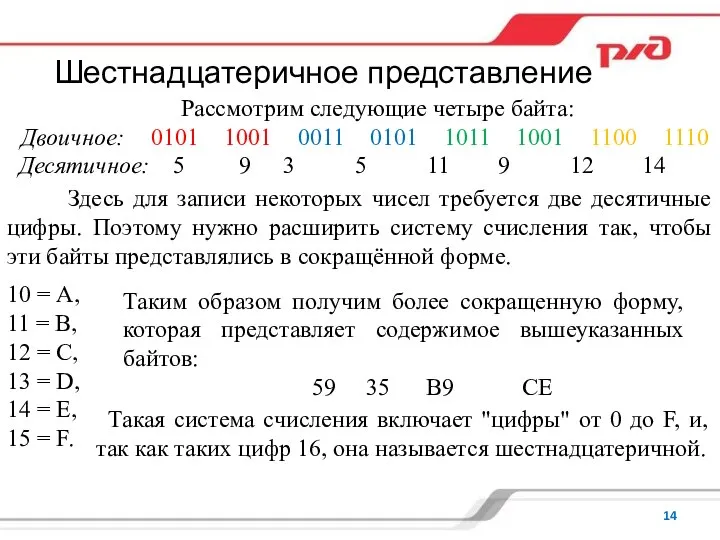
Рассмотрим следующие четыре байта:
Двоичное: 0101 1001 0011 0101 1011 1001 1100 1110
Шестнадцатеричное представление
Рассмотрим следующие четыре байта:
Двоичное: 0101 1001 0011 0101 1011 1001 1100 1110
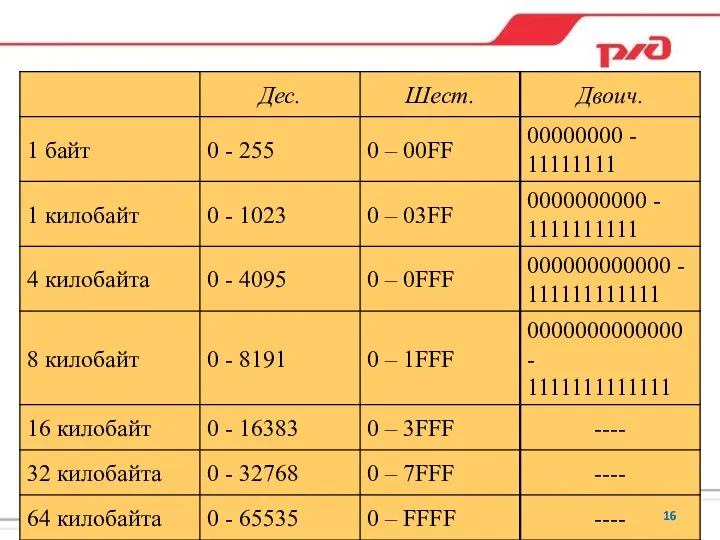
Слайд 15Шестнадцатеричное представление
Таблица
Шестнадцатеричное представление
Таблица

Слайд 17Существует множество микро-ЭВМ с различными характеристиками и со временем их параметры фирмы-разработчики
Существует множество микро-ЭВМ с различными характеристиками и со временем их параметры фирмы-разработчики
Слайд 19Архитектура MCS-51
Блок управления предназначен для выработки синхронизирующих и управляющих сигналов.
Формирует
Архитектура MCS-51
Блок управления предназначен для выработки синхронизирующих и управляющих сигналов.
Формирует
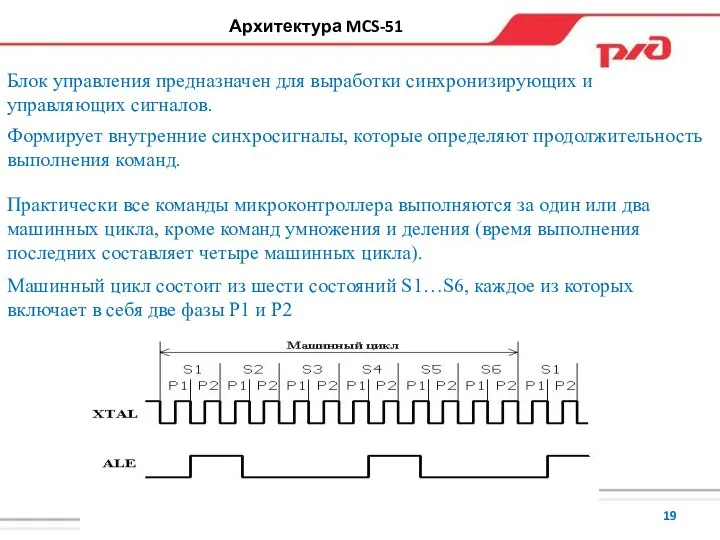
Слайд 20Длительность каждой фазы равна периоду следования синхроимпульсов, который задается частотой кварцевого резонатора,
Длительность каждой фазы равна периоду следования синхроимпульсов, который задается частотой кварцевого резонатора,
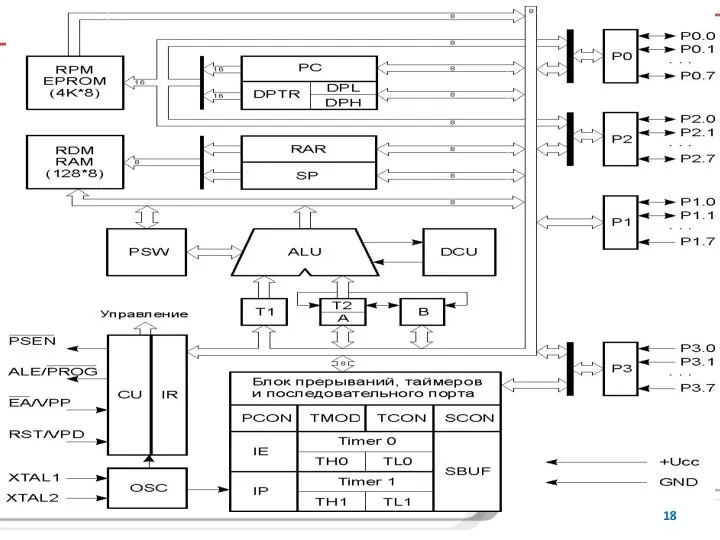
Слайд 21 EPROM – память программ (4Кбайт);
RAM – память данных (128 байт);
EPROM – память программ (4Кбайт);
RAM – память данных (128 байт);
Слайд 22 A – Аккумулятор
B – регистр расширитель аккумулятора
CU –
A – Аккумулятор
B – регистр расширитель аккумулятора
CU –
Слайд 23 TMOD – регистр режимов таймеров счетчиков;
TCON – регистр управления статуса
TMOD – регистр режимов таймеров счетчиков;
TCON – регистр управления статуса
Слайд 24Назначение выводов MCS-51
Назначение выводов, условное графическое обозначение
Назначение выводов MCS-51
Назначение выводов, условное графическое обозначение
Слайд 25Vss – потенциал общего провода ("земли");
Vcc – основное напряжение питания +5
Vss – потенциал общего провода ("земли");
Vcc – основное напряжение питания +5
Слайд 26P2 – восьми битный двунаправленный порт, аналогичный Р1; кроме того, выводы этого
P2 – восьми битный двунаправленный порт, аналогичный Р1; кроме того, выводы этого
Слайд 27Схема включения микро-ЭВМ
При подаче питания формируется импульс сброса RESET. В программном счетчике
Схема включения микро-ЭВМ
При подаче питания формируется импульс сброса RESET. В программном счетчике
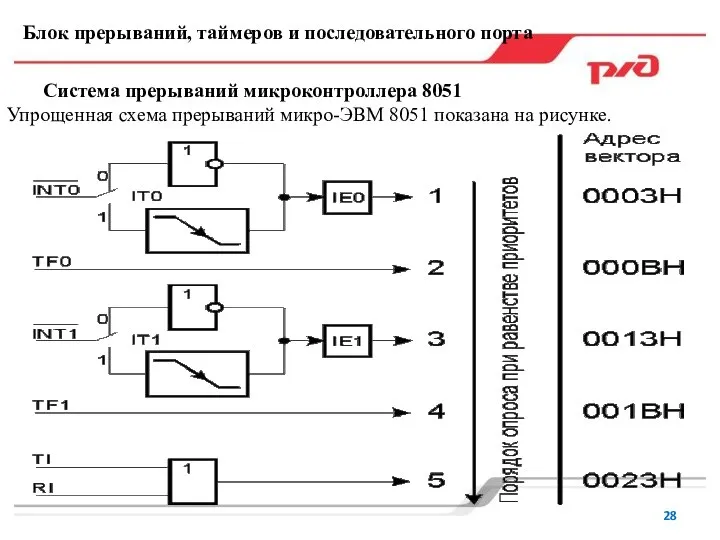
Слайд 28Блок прерываний, таймеров и последовательного порта
Система прерываний микроконтроллера 8051
Упрощенная схема прерываний микро-ЭВМ
Блок прерываний, таймеров и последовательного порта
Система прерываний микроконтроллера 8051
Упрощенная схема прерываний микро-ЭВМ
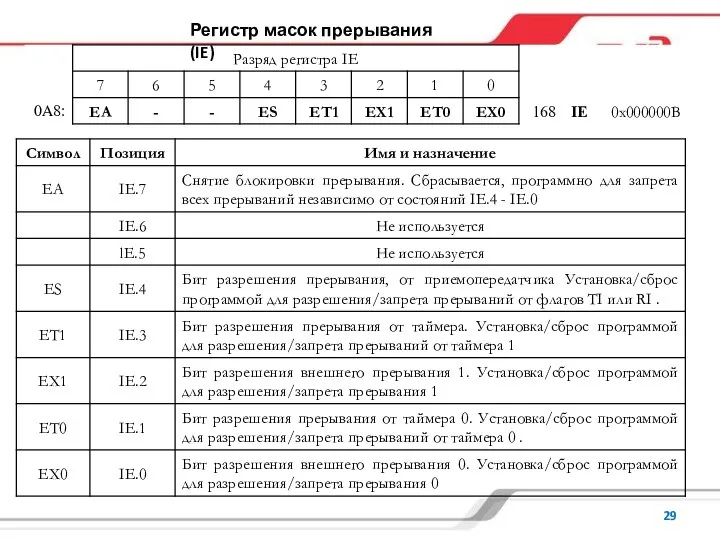
Слайд 29Регистр масок прерывания (IE)
Регистр масок прерывания (IE)
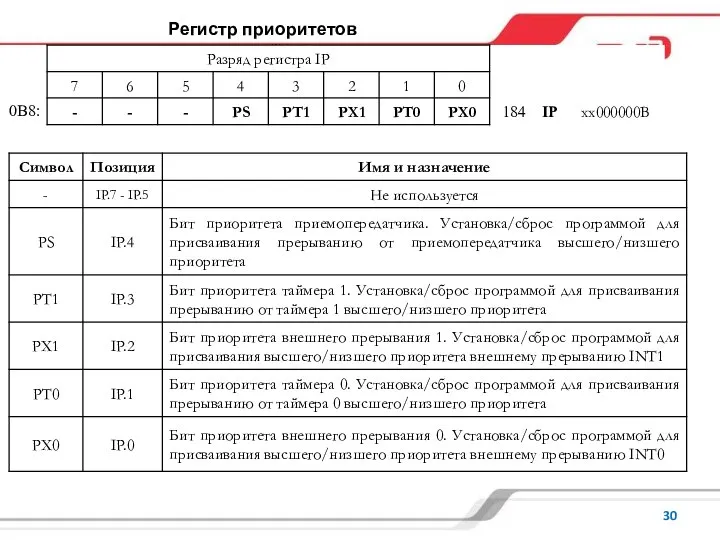
Слайд 30Регистр приоритетов прерываний (IP)
Регистр приоритетов прерываний (IP)
Слайд 31Особенности обслуживания прерываний
Система прерываний формирует аппаратный вызов соответствующей подпрограммы обслуживания, если она
Особенности обслуживания прерываний
Система прерываний формирует аппаратный вызов соответствующей подпрограммы обслуживания, если она
Слайд 32Таймеры / счетчики микро-ЭВМ семейства 8051
В базовых моделях семейства имеются два
Таймеры / счетчики микро-ЭВМ семейства 8051
В базовых моделях семейства имеются два
Слайд 33«1»
«0»
+1
+1
Сигнал на внешнем
выводе Т0 (Т1)
Содержимое счетчика
«1»
«0»
Фиксация наличия «1» на входе Т0 (Т1)
«1»
«0»
+1
+1
Сигнал на внешнем
выводе Т0 (Т1)
Содержимое счетчика
«1»
«0»
Фиксация наличия «1» на входе Т0 (Т1)
Слайд 34Регистр управления режимами работы таймеров TMOD
Регистр управления режимами работы таймеров TMOD
Слайд 35Регистр организации взаимодействия таймеров с системой прерываний TCON
Регистр организации взаимодействия таймеров с системой прерываний TCON
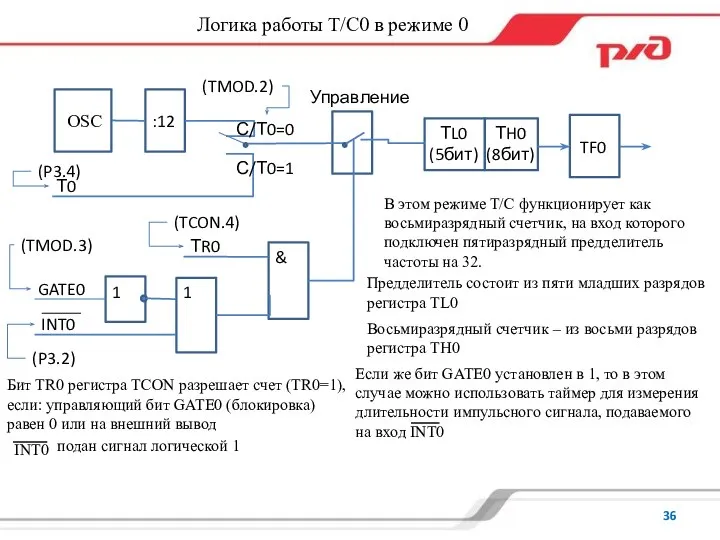
Слайд 36Логика работы Т/С0 в режиме 0
В этом режиме Т/C функционирует как восьмиразрядный
Логика работы Т/С0 в режиме 0
В этом режиме Т/C функционирует как восьмиразрядный
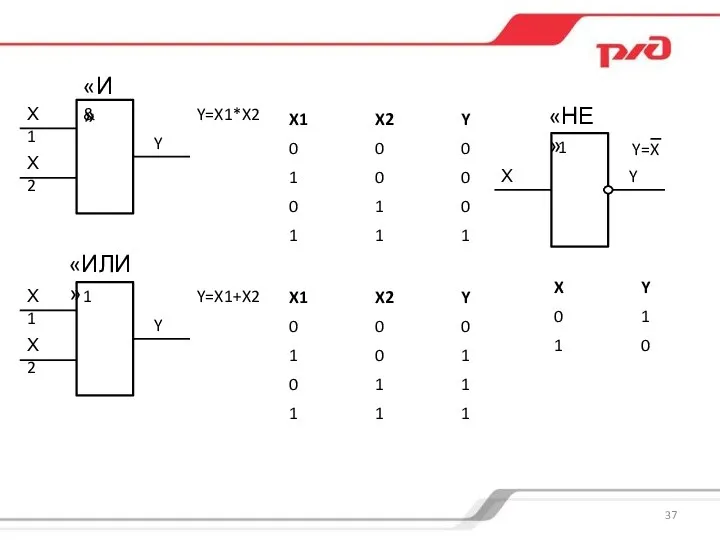
Слайд 37&
Х1
Х2
Y
Y=X1*X2
1
Х1
Х2
Y
Y=X1+X2
«И»
«ИЛИ»
1
Х
Y
Y=X
«НЕ»
&
Х1
Х2
Y
Y=X1*X2
1
Х1
Х2
Y
Y=X1+X2
«И»
«ИЛИ»
1
Х
Y
Y=X
«НЕ»
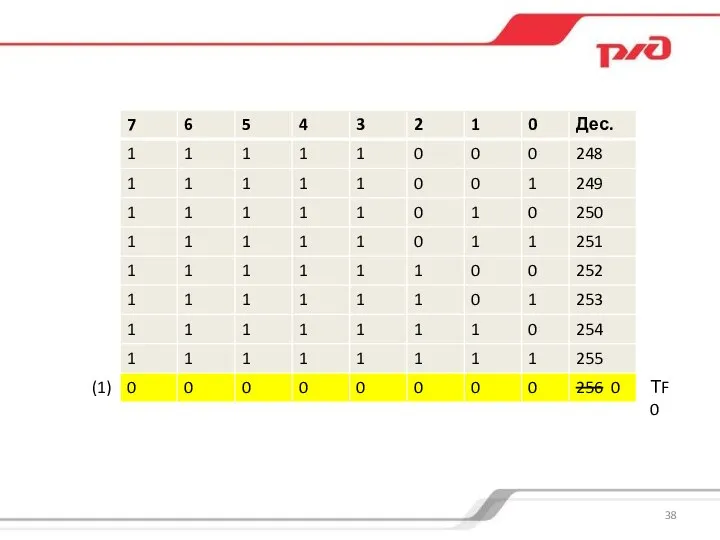
Слайд 38(1)
ТF0
(1)
ТF0
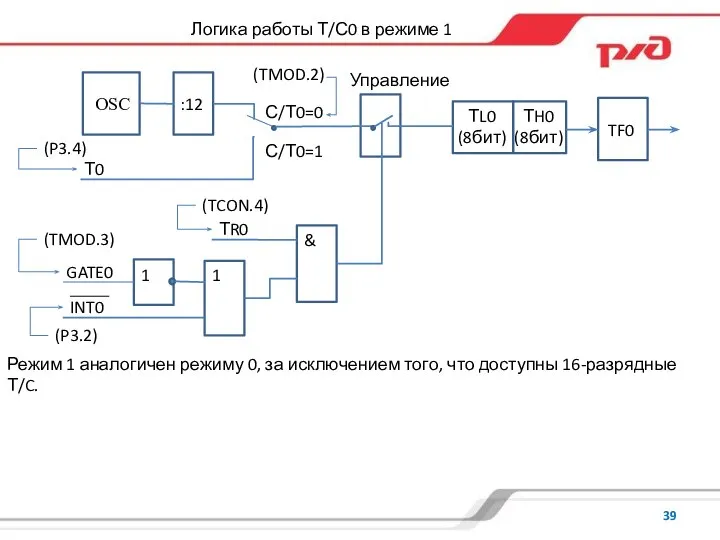
Слайд 39Логика работы Т/С0 в режиме 1
Режим 1 аналогичен режиму 0, за исключением
Логика работы Т/С0 в режиме 1
Режим 1 аналогичен режиму 0, за исключением
Слайд 40Логика работы Т/С1 в режиме 2
В режиме 2 Т/C1 работает в качестве
Логика работы Т/С1 в режиме 2
В режиме 2 Т/C1 работает в качестве
Слайд 41Логика работы Т/С0 в режиме 3
В режиме 3 Т/C0 и Т/C1
Логика работы Т/С0 в режиме 3
В режиме 3 Т/C0 и Т/C1
Слайд 42Регистр управления последовательным портом SCON
Регистр управления последовательным портом SCON
Слайд 43Блок последовательного интерфейса
Блок последовательного интерфейса предназначен для организации ввода/вывода информации по
Блок последовательного интерфейса
Блок последовательного интерфейса предназначен для организации ввода/вывода информации по
Слайд 44RXD
(P3.0)
1
2
3
4
5
6
7
8
TXD
(P3.1)
RXD
(P3.0)
1
2
3
4
5
6
7
8
TXD
(P3.1)
старт-бит
«0»
стоп-бит
«1»
1
2
3
4
5
6
7
8
старт-бит
«0»
стоп-бит
«1»
прием
передача
прием/передача
RXD
(P3.0)
1
2
3
4
5
6
7
8
TXD
(P3.1)
RXD
(P3.0)
1
2
3
4
5
6
7
8
TXD
(P3.1)
старт-бит
«0»
стоп-бит
«1»
1
2
3
4
5
6
7
8
старт-бит
«0»
стоп-бит
«1»
прием
передача
прием/передача
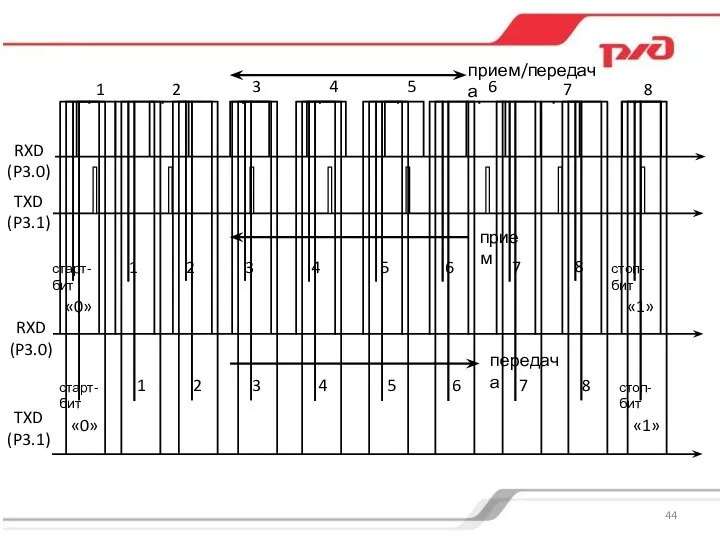
Слайд 45Режим 2. Информация передается через выход передатчика TxD (Р3.1), а принимается через
Режим 2. Информация передается через выход передатчика TxD (Р3.1), а принимается через
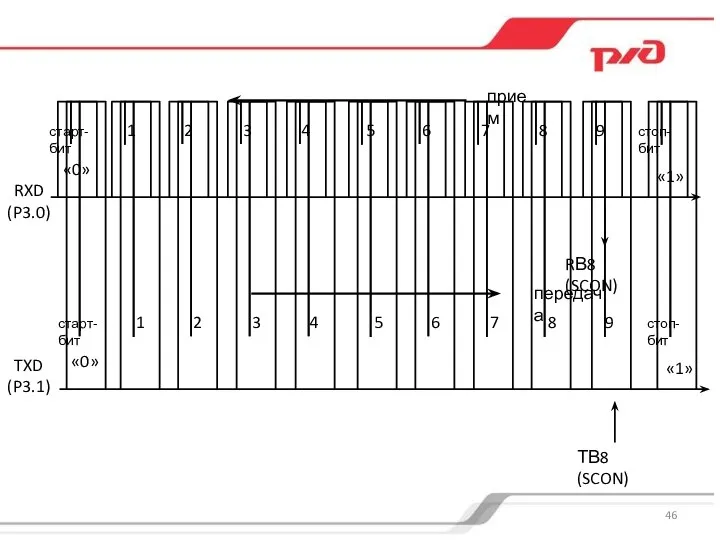
Слайд 46RXD
(P3.0)
1
2
3
4
5
6
7
8
TXD
(P3.1)
старт-бит
«0»
стоп-бит
«1»
прием
передача
1
2
3
4
5
6
7
8
старт-бит
«0»
стоп-бит
«1»
9
9
ТВ8 (SCON)
RВ8 (SCON)
RXD
(P3.0)
1
2
3
4
5
6
7
8
TXD
(P3.1)
старт-бит
«0»
стоп-бит
«1»
прием
передача
1
2
3
4
5
6
7
8
старт-бит
«0»
стоп-бит
«1»
9
9
ТВ8 (SCON)
RВ8 (SCON)
Слайд 47В таблице приведен ряд стандартных скоростей последовательного обмена и то, как они
В таблице приведен ряд стандартных скоростей последовательного обмена и то, как они

Слайд 48FFH = 255D
FDH = 253D
E8H = 232D
72H = 114D
FFH = 255D
FDH = 253D
E8H = 232D
72H = 114D
Слайд 49Интерфейсы последовательного
ввода вывода информации
Электрические интерфейсы RS-232, RS-422, RS-423 (V.10), RS-485, токовая петля
Последовательные
Интерфейсы последовательного
ввода вывода информации
Электрические интерфейсы RS-232, RS-422, RS-423 (V.10), RS-485, токовая петля
Последовательные

Слайд 50При этом обеспечивается полудуплексный режим связи, то есть, приемник и передатчик могут
При этом обеспечивается полудуплексный режим связи, то есть, приемник и передатчик могут
Слайд 51Принципиальное отличие передатчиков RS-485 – возможность переключения в третье состояние.
Дифференциальная схема
Принципиальное отличие передатчиков RS-485 – возможность переключения в третье состояние.
Дифференциальная схема
Слайд 52Во многих случаях функционально-логических возможностей однокристального МК бывает недостаточно. Поэтому можно расширить
Во многих случаях функционально-логических возможностей однокристального МК бывает недостаточно. Поэтому можно расширить
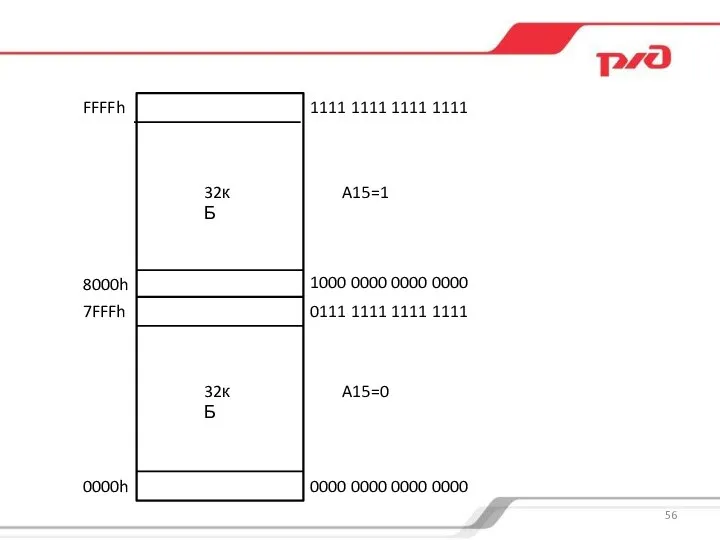
Слайд 53Пусть требуется объем внешней памяти программ в размере 32 кбайта.
Подбирается подходящая по
Пусть требуется объем внешней памяти программ в размере 32 кбайта.
Подбирается подходящая по
Слайд 54Высокоимпедансное состояние, высокоомное состояние, Z-состояние или состояние «Выключено» — состояние вывода цифровой микросхемы,
Высокоимпедансное состояние, высокоомное состояние, Z-состояние или состояние «Выключено» — состояние вывода цифровой микросхемы,
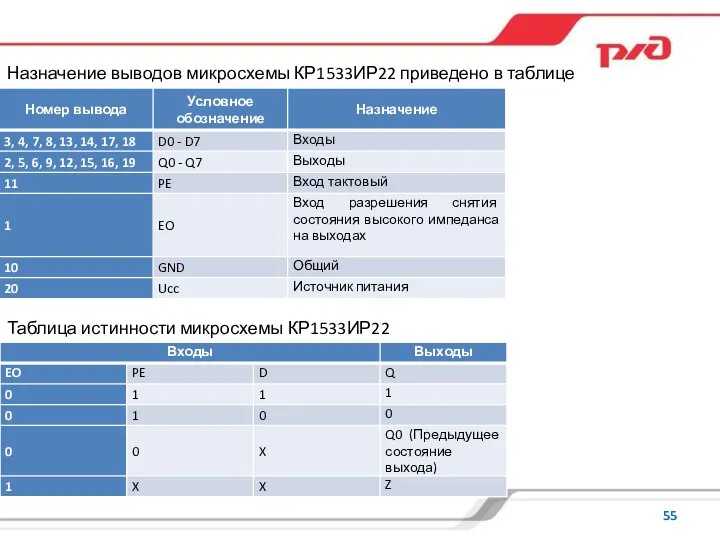
Слайд 55Назначение выводов микросхемы КР1533ИР22 приведено в таблице
Таблица истинности микросхемы КР1533ИР22
Назначение выводов микросхемы КР1533ИР22 приведено в таблице
Таблица истинности микросхемы КР1533ИР22
Слайд 560000h
7FFFh
8000h
FFFFh
0000 0000 0000 0000
0111 1111 1111 1111
1000 0000 0000 0000
1111 1111 1111
0000h
7FFFh
8000h
FFFFh
0000 0000 0000 0000
0111 1111 1111 1111
1000 0000 0000 0000
1111 1111 1111
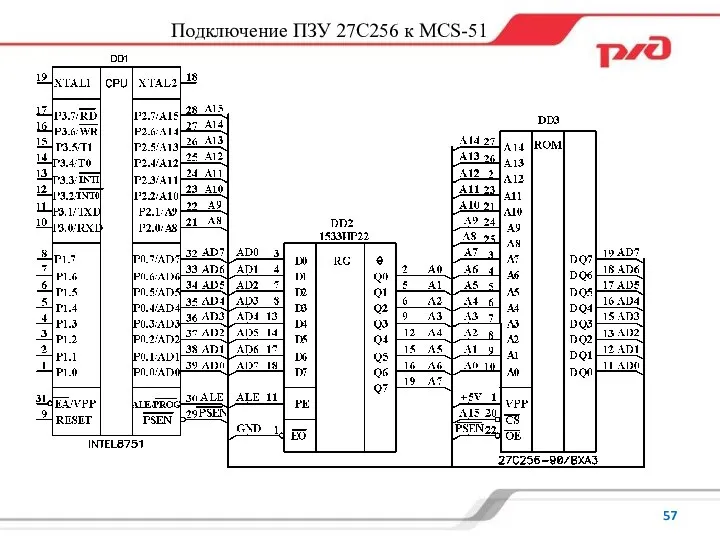
Слайд 57Подключение ПЗУ 27С256 к MCS-51
Подключение ПЗУ 27С256 к MCS-51
Слайд 58В некоторых МПС, рассчитанных на обработку больших массивов данных, РПД может оказаться
В некоторых МПС, рассчитанных на обработку больших массивов данных, РПД может оказаться
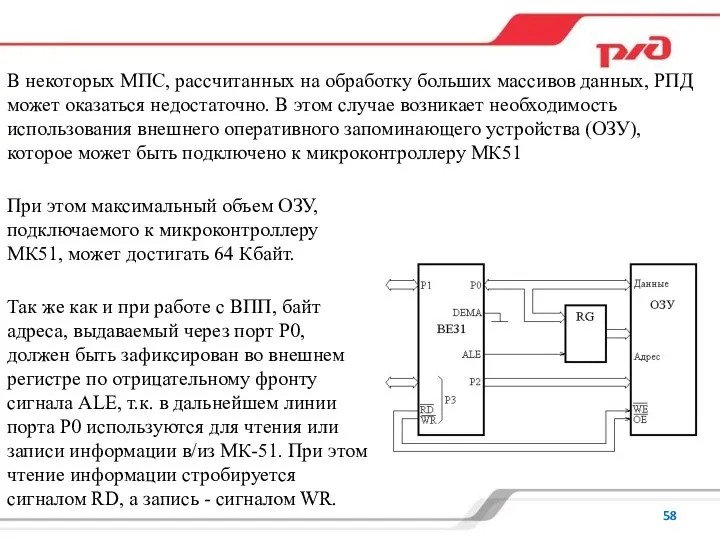
Слайд 59Пусть для функционирования системы требуется объем внешней памяти данных в размере 32
Пусть для функционирования системы требуется объем внешней памяти данных в размере 32
Слайд 60Подключение ОЗУ KM62256D к MCS-51
Подключение ОЗУ KM62256D к MCS-51
Слайд 61Сопряжение микро-ЭВМ
с устройствами ввода информации
Если входных кнопок не много и есть свободные
Сопряжение микро-ЭВМ
с устройствами ввода информации
Если входных кнопок не много и есть свободные
Слайд 62Устранение дребезга контактов
При работе МК с датчиками, имеющими механические или электромеханические контакты
Устранение дребезга контактов
При работе МК с датчиками, имеющими механические или электромеханические контакты
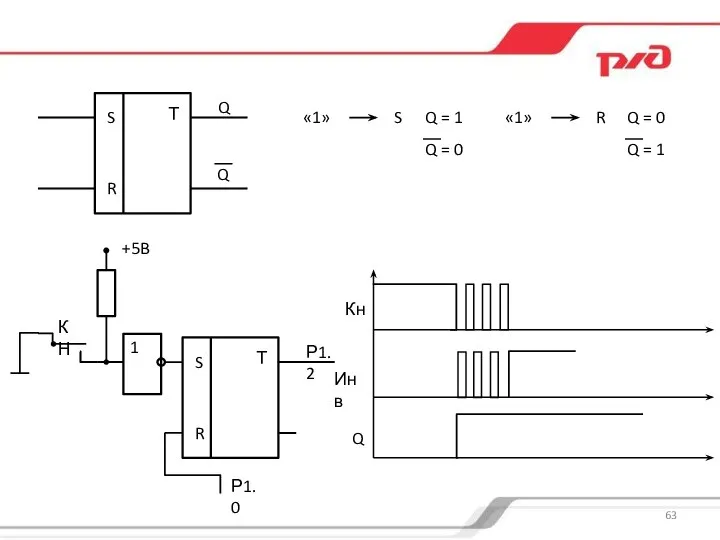
Слайд 63Т
Т
S
R
Q
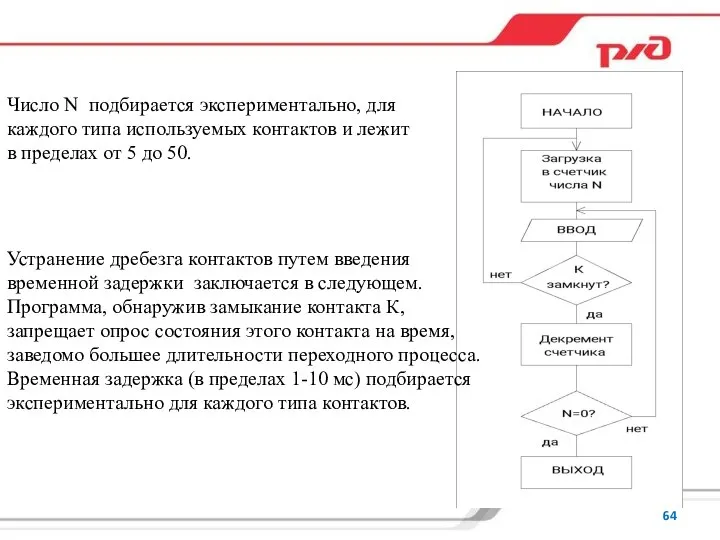
Q
«1»
S
Q = 1
Q = 0
«1»
R
Q = 0
Q = 1
Т
Т
S
R
Р1.2
Р1.0
1
1
+5B
КН
Кн
Инв
Q
Т
Т
S
R
Q
Q
«1»
S
Q = 1
Q = 0
«1»
R
Q = 0
Q = 1
Т
Т
S
R
Р1.2
Р1.0
1
1
+5B
КН
Кн
Инв
Q
Слайд 64Число N подбирается экспериментально, для каждого типа используемых контактов и лежит в
Число N подбирается экспериментально, для каждого типа используемых контактов и лежит в
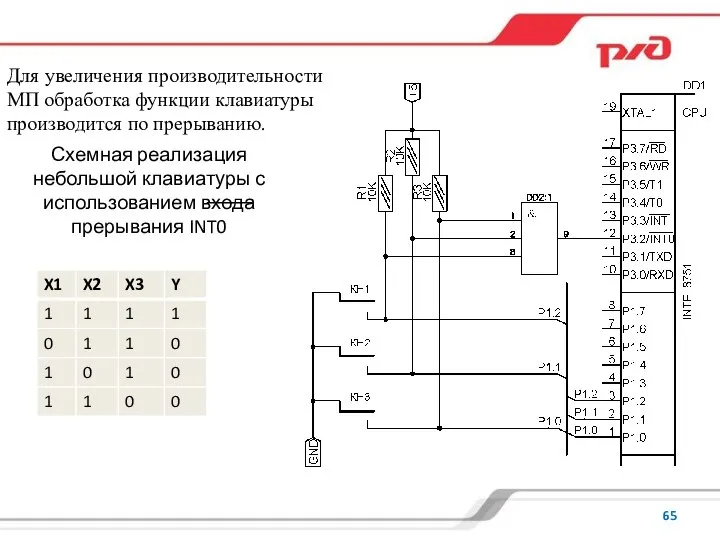
Слайд 65Для увеличения производительности МП обработка функции клавиатуры производится по прерыванию.
Схемная реализация небольшой
Для увеличения производительности МП обработка функции клавиатуры производится по прерыванию.
Схемная реализация небольшой
Слайд 66Расширение каналов ввода/вывода информации
Число линий ввода/вывода микроконтроллера МК-51 во многих реальных
Расширение каналов ввода/вывода информации
Число линий ввода/вывода микроконтроллера МК-51 во многих реальных
Слайд 67MS
D1
D2
MS
D1
D2
Слайд 68Назначение выводов микросхемы К1533КП12 приведено в таблице
Таблица истинности микросхемы К1533КП12
Назначение выводов микросхемы К1533КП12 приведено в таблице
Таблица истинности микросхемы К1533КП12
Слайд 69Можно увеличить число линий ввода до 32 за счет добавления в схему
двух
Можно увеличить число линий ввода до 32 за счет добавления в схему
двух
Слайд 70Сопряжение микро-ЭВМ
с устройствами ввода информации
Возврат и обработка если нажата клавиша.
Схемная реализация клавиатуры
Сопряжение микро-ЭВМ
с устройствами ввода информации
Возврат и обработка если нажата клавиша.
Схемная реализация клавиатуры
Слайд 71Диоды предназначены для защиты токового ключа порта от замыкания на другие линии
Диоды предназначены для защиты токового ключа порта от замыкания на другие линии
Слайд 72Расширение каналов вывода информации обычно достигается за счет использования нескольких регистров, стробируемых
Расширение каналов вывода информации обычно достигается за счет использования нескольких регистров, стробируемых
Слайд 73Вых. шина
D5
D6
Вых. шина
D5
D6
Слайд 741
1
1
1
1
1
С1
С2
С3
С4
Р1.6
Р1.7
«ИЛИ-НЕ»
Дешифратор
1
1
1
1
1
1
С1
С2
С3
С4
Р1.6
Р1.7
«ИЛИ-НЕ»
Дешифратор
Слайд 75В качестве индикации можно подключить светодиоды непосредственно на порт микро-ЭВМ, при этом
В качестве индикации можно подключить светодиоды непосредственно на порт микро-ЭВМ, при этом
Слайд 76Использование мощных транзисторов с коэффициентом передачи тока более 700 даёт возможность коммутации
Использование мощных транзисторов с коэффициентом передачи тока более 700 даёт возможность коммутации

Слайд 77В случае большого количества объектов управления коммутацию лучше производить по матричной схеме.
В случае большого количества объектов управления коммутацию лучше производить по матричной схеме.
Слайд 78Каждое устройство в системе имеет свой уникальный адрес
Каждое устройство в системе имеет свой уникальный адрес
Слайд 79Дешифратор адреса микропроцессорной
информационно - управляющей системы
В соответствии с сигналами на адресных входах
Дешифратор адреса микропроцессорной
информационно - управляющей системы
В соответствии с сигналами на адресных входах

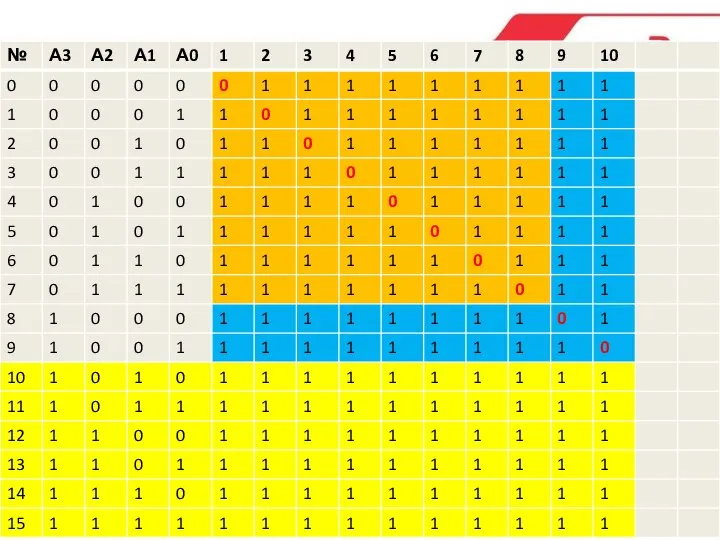
Слайд 80ИД10
Преобразует четырехразрядный двоичный код, поступающий на входы А0 - А3 в сигнал
ИД10
Преобразует четырехразрядный двоичный код, поступающий на входы А0 - А3 в сигнал
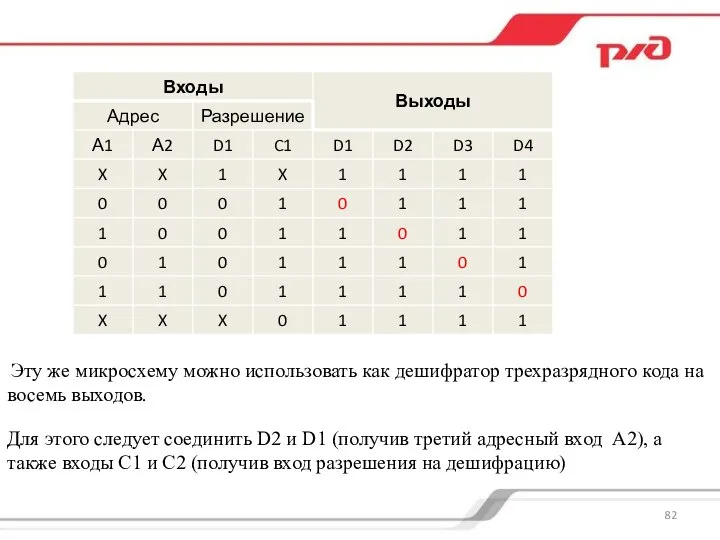
Слайд 82 Эту же микросхему можно использовать как дешифратор трехразрядного кода на восемь выходов.
Для
Эту же микросхему можно использовать как дешифратор трехразрядного кода на восемь выходов.
Для
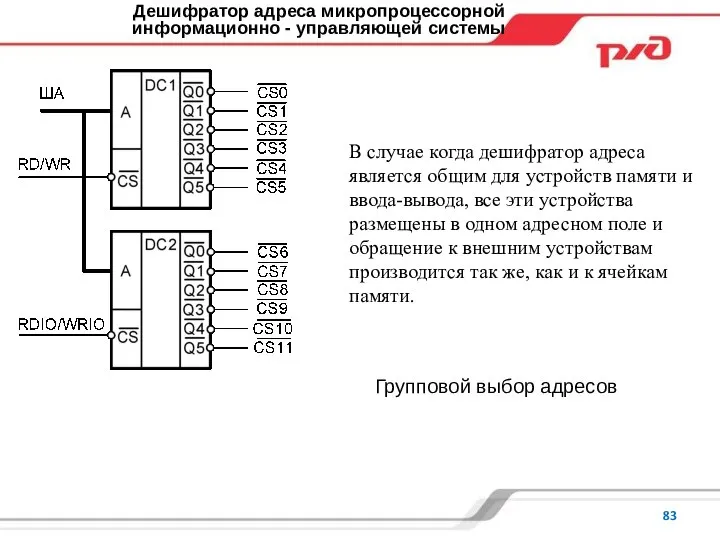
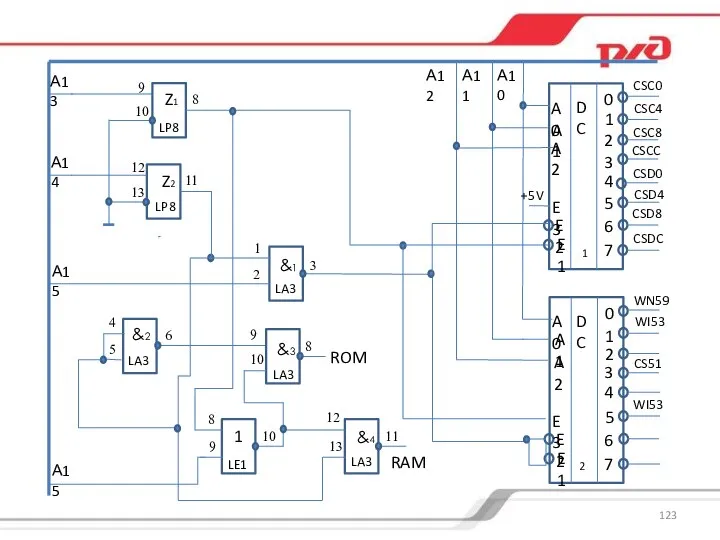
Слайд 83Дешифратор адреса микропроцессорной
информационно - управляющей системы
В случае когда дешифратор адреса является общим
Дешифратор адреса микропроцессорной
информационно - управляющей системы
В случае когда дешифратор адреса является общим
Слайд 84Во многих применениях МК-51 необходимо сформировать импульс заданной длительности на той или
Во многих применениях МК-51 необходимо сформировать импульс заданной длительности на той или
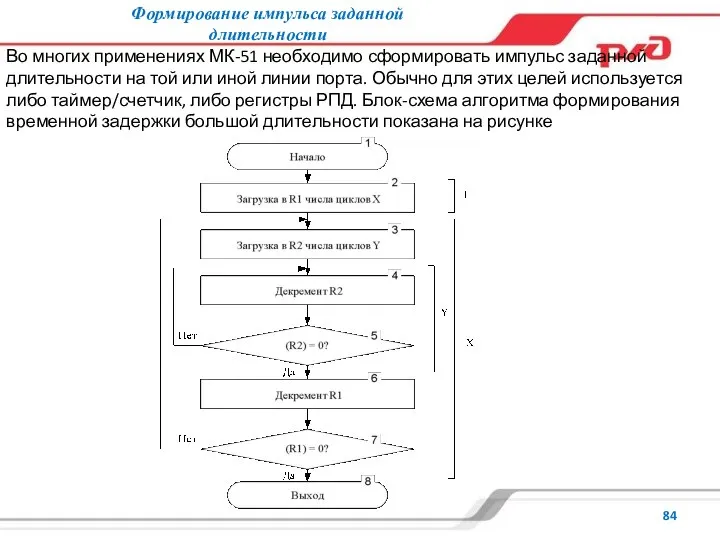
Слайд 85Данный алгоритм для формирования временной задержки использует так называемые вложенные циклы.
На
Данный алгоритм для формирования временной задержки использует так называемые вложенные циклы.
На
Слайд 86Время задержки в секундах рассчитывается по формуле:
Если задана длительность импульса, формируемого
Время задержки в секундах рассчитывается по формуле:
Если задана длительность импульса, формируемого
Слайд 87АЦП МПИУС
Из всего многообразия существующих методов аналого-цифрового преобразования в интегральной технологии нашли
АЦП МПИУС
Из всего многообразия существующих методов аналого-цифрового преобразования в интегральной технологии нашли
Слайд 88Недостатком их является необходимость в большом количестве компараторов. Так, для 8-разрядного АЦП
Недостатком их является необходимость в большом количестве компараторов. Так, для 8-разрядного АЦП

Слайд 89Uвх
13/2h
11/2h
9/2h
7/2h
5/2h
3/2h
1/2h
Δ1
Δ6
Δ7
Δ8
Δ4
Δ5
Δ3
Δ2
t
Uвх
13/2h
11/2h
9/2h
7/2h
5/2h
3/2h
1/2h
Δ1
Δ6
Δ7
Δ8
Δ4
Δ5
Δ3
Δ2
t
Слайд 91АЦП последовательного приближения состоит из следующих узлов:
1. Компаратор. Он сравнивает входную величину
АЦП последовательного приближения состоит из следующих узлов:
1. Компаратор. Он сравнивает входную величину
Слайд 92АЦП последовательного приближения
АЦП последовательного приближения
Слайд 93пуск
fтакт
2h
4h
6h
8h
Uвх
Uk
t
t
t
t
время измерения
1000
0100
0110
0101
0101
0
0
0
1
пуск
fтакт
2h
4h
6h
8h
Uвх
Uk
t
t
t
t
время измерения
1000
0100
0110
0101
0101
0
0
0
1
Слайд 94Наиболее простыми по структуре среди интегрирующих преобразователей являются АЦП с преобразованием напряжения
Наиболее простыми по структуре среди интегрирующих преобразователей являются АЦП с преобразованием напряжения
Слайд 95АЦП с двойным интегрированием
АЦП с двойным интегрированием
Слайд 96Процесс преобразования состоит из двух этапов.
Сначала производится интегрирование входного аналогового сигнала
Процесс преобразования состоит из двух этапов.
Сначала производится интегрирование входного аналогового сигнала
Слайд 97Время первого интегрирования (постоянное)
Время второго интегрирования,
где n2 - содержимое счетчика после
Время первого интегрирования (постоянное)
Время второго интегрирования,
где n2 - содержимое счетчика после
Слайд 98Цифро-аналоговые преобразователи
Цифро-аналоговый преобразователь (ЦАП) предназначен для автоматического преобразования входных величин, представленных числовыми
Цифро-аналоговые преобразователи
Цифро-аналоговый преобразователь (ЦАП) предназначен для автоматического преобразования входных величин, представленных числовыми
Слайд 99Uвых
R
Roc
R
R
2R
2R
2R
2R
2R
0
0
0
0
1
1
1
1
Uоп
Входное сопротивление резистивной матрицы не зависит от положения ключей. Коэффициент передачи между
Uвых
R
Roc
R
R
2R
2R
2R
2R
2R
0
0
0
0
1
1
1
1
Uоп
Входное сопротивление резистивной матрицы не зависит от положения ключей. Коэффициент передачи между
Слайд 100Классификация микропроцессорных информационно-управляющих систем на железнодорожном транспорте
К основным таким системам относятся:
Классификация микропроцессорных информационно-управляющих систем на железнодорожном транспорте
К основным таким системам относятся:
Слайд 101Основные преимущества микропроцессорных систем
1. Более высокий уровень надежности
2. Наличие встроенного диагностического контроля
Основные преимущества микропроцессорных систем
1. Более высокий уровень надежности
2. Наличие встроенного диагностического контроля
Слайд 102Обеспечение безопасности в микропроцессорных информационно-управляющих системах
Недостатки полупроводниковой элементной базы по сравнению с
Обеспечение безопасности в микропроцессорных информационно-управляющих системах
Недостатки полупроводниковой элементной базы по сравнению с
Слайд 103Структура программного обеспечения
Структура программного обеспечения
Слайд 104Обеспечение безопасности в микропроцессорных системах:
1. Избыточность позволяет исключить случайные ошибки в микропроцессорных
Обеспечение безопасности в микропроцессорных системах:
1. Избыточность позволяет исключить случайные ошибки в микропроцессорных
Слайд 105Обеспечение безопасности в микропроцессорных централизациях
Обеспечение безопасности в микропроцессорных централизациях
Слайд 106Структура системы EBIlock 950
Структура системы EBIlock 950
Слайд 107Структурная схема системы EBI lock-950
Структурная схема системы EBI lock-950
Слайд 108Одним из перспективных направлений перехода на компьютерные средства в устройствах станционной автоматики
Одним из перспективных направлений перехода на компьютерные средства в устройствах станционной автоматики
Слайд 110Электрическая схема контроля одного двухпозиционного объекта платы УМВ-64/8-S релейно-процессорная централизация «ЭЦ-МПК»
Электрическая схема контроля одного двухпозиционного объекта платы УМВ-64/8-S релейно-процессорная централизация «ЭЦ-МПК»
Слайд 111Принципиальная схема управления реле платы УДО-48P
Принципиальная схема управления реле платы УДО-48P
Слайд 112К системам диспетчерского управления движением поездов относится диспетчерская централизация (ДЦ)
Диспетчерская централизация применяется
К системам диспетчерского управления движением поездов относится диспетчерская централизация (ДЦ)
Диспетчерская централизация применяется
Слайд 1132. Контроль положения и свободности стрелок и изолированных участков, занятости перегонов и
2. Контроль положения и свободности стрелок и изолированных участков, занятости перегонов и
Слайд 116БРКП
МГР 1
МГР 2
МГР 3
МГР 4
МВИ
вх1
вх8
вх9
вх16
вх17
вх24
вх25
вх32
ШД
Интерфейс RS-485
CPU
БП
адрес МГР
индикация
интерфейс
программ
узел
конф.
18-36В
БРКП
МГР 1
МГР 2
МГР 3
МГР 4
МВИ
вх1
вх8
вх9
вх16
вх17
вх24
вх25
вх32
ШД
Интерфейс RS-485
CPU
БП
адрес МГР
индикация
интерфейс
программ
узел
конф.
18-36В
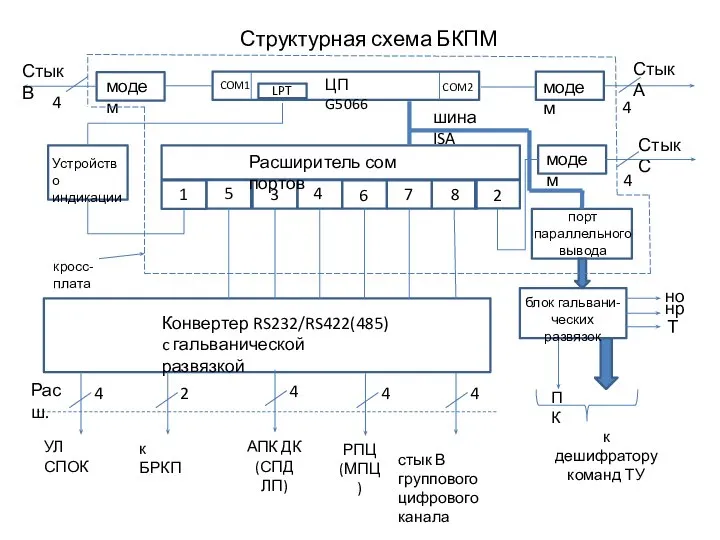
Слайд 117Структурная схема БКПМ
ЦП G5066
COM1
COM2
модем
модем
модем
Стык В
4
4
Стык А
Стык С
4
шина ISA
1
5
3
4
6
7
8
2
Расширитель сом портов
Устройство
индикации
LPT
Конвертер RS232/RS422(485)
Структурная схема БКПМ
ЦП G5066
COM1
COM2
модем
модем
модем
Стык В
4
4
Стык А
Стык С
4
шина ISA
1
5
3
4
6
7
8
2
Расширитель сом портов
Устройство
индикации
LPT
Конвертер RS232/RS422(485)
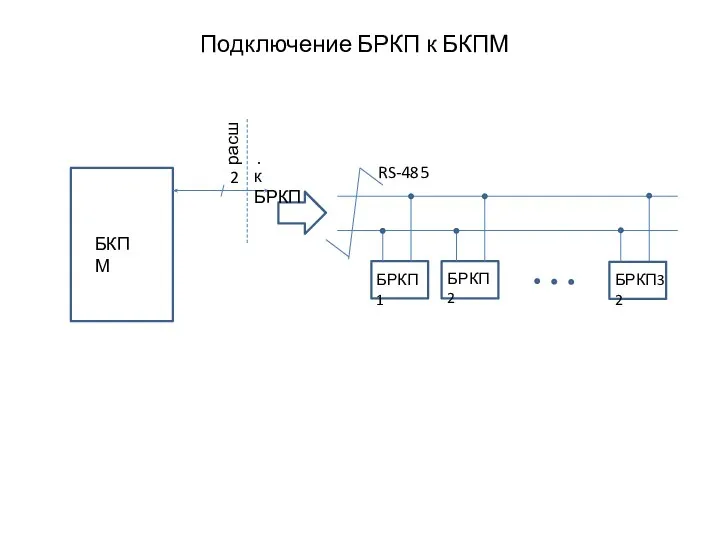
Слайд 118Подключение БРКП к БКПМ
2
БКПМ
расш.
RS-485
БРКП1
БРКП2
БРКП32
к БРКП
Подключение БРКП к БКПМ
2
БКПМ
расш.
RS-485
БРКП1
БРКП2
БРКП32
к БРКП
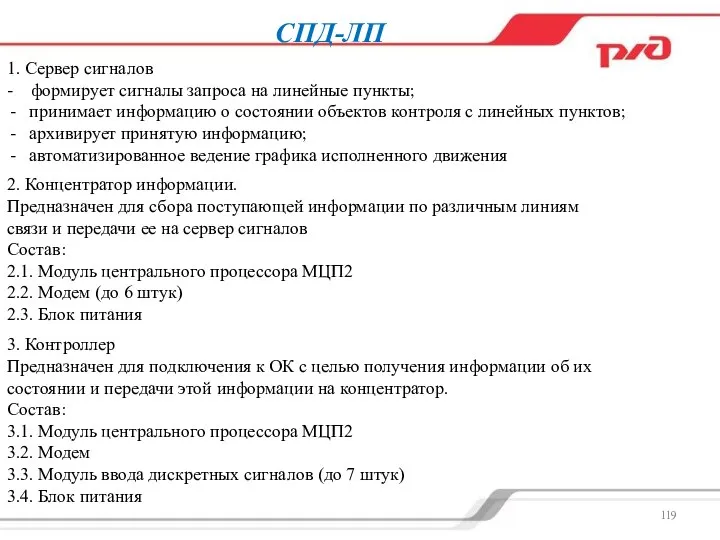
Слайд 119СПД-ЛП
1. Сервер сигналов
- формирует сигналы запроса на линейные пункты;
принимает информацию о состоянии
СПД-ЛП
1. Сервер сигналов
- формирует сигналы запроса на линейные пункты;
принимает информацию о состоянии
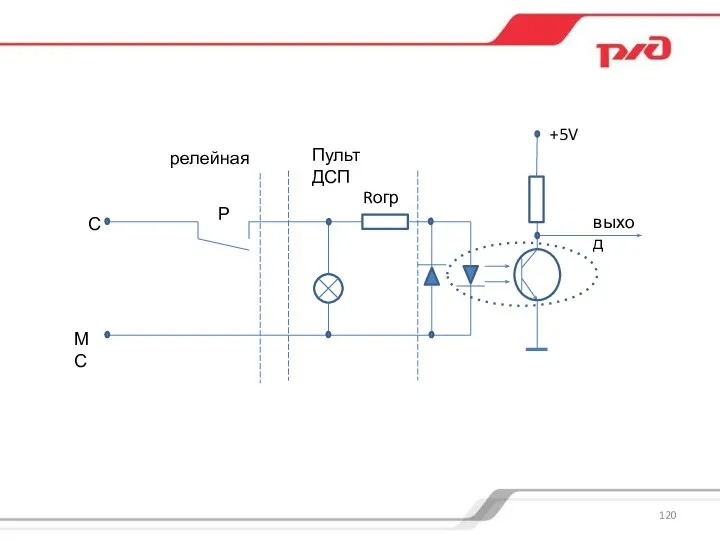
Слайд 120Р
С
МС
релейная
Пульт ДСП
Rогр
+5V
выход
Р
С
МС
релейная
Пульт ДСП
Rогр
+5V
выход
Слайд 121МЦП-2
МЦП-2

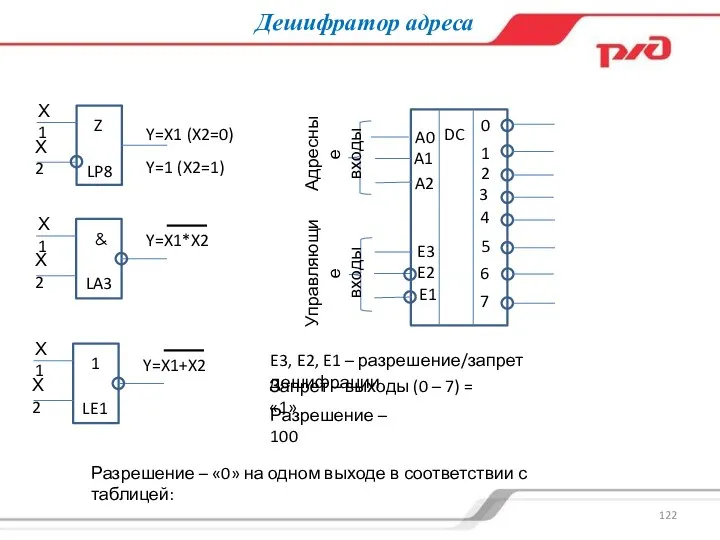
Слайд 122Дешифратор адреса
Х1
Х2
Z
Y=X1 (X2=0)
Y=1 (X2=1)
Х1
Х2
&
Y=X1*X2
Х1
Х2
1
Y=X1+X2
DC
A0
A1
A2
E3
E2
E1
Адресные
входы
Управляющие
входы
0
7
6
5
4
3
2
1
E3, E2, E1 – разрешение/запрет дешифрации
Разрешение –
Дешифратор адреса
Х1
Х2
Z
Y=X1 (X2=0)
Y=1 (X2=1)
Х1
Х2
&
Y=X1*X2
Х1
Х2
1
Y=X1+X2
DC
A0
A1
A2
E3
E2
E1
Адресные
входы
Управляющие
входы
0
7
6
5
4
3
2
1
E3, E2, E1 – разрешение/запрет дешифрации
Разрешение –
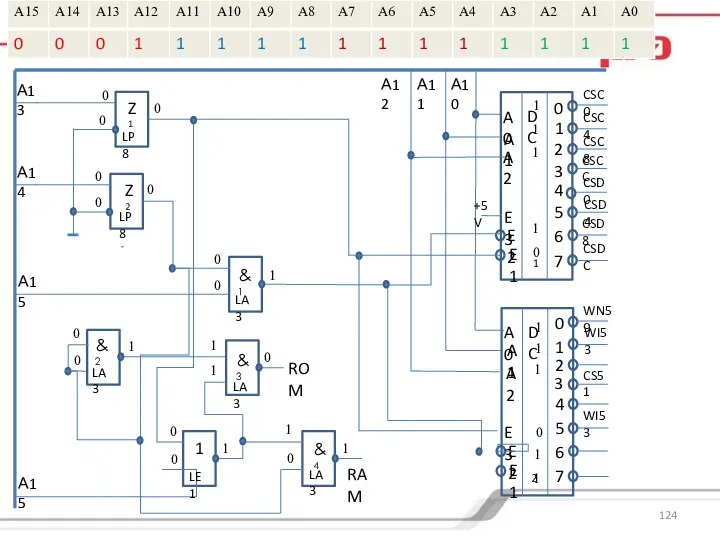
Слайд 1241
1
1
1
1
1
1
0
0
1
1
1
1
1
1
1
1
1
0
0
1
1
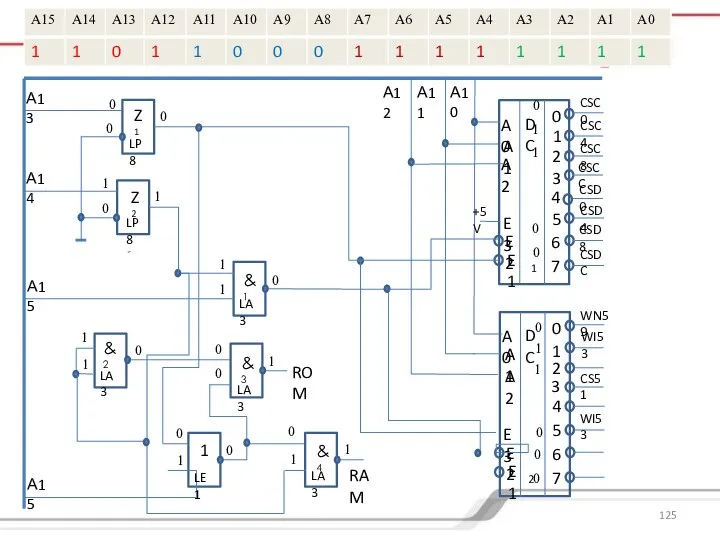
Слайд 1250
1
1
0
1
1
0
0
0
0
0
0
1
1
0
1
1
0
0
0
0
0
 Презентация на тему Типы текста (4 класс)
Презентация на тему Типы текста (4 класс) 5-я ежегодная благотворительная программа «Перекрёсток»-школам!» 2009
5-я ежегодная благотворительная программа «Перекрёсток»-школам!» 2009 Сергий Радонежский
Сергий Радонежский Новый вид искусства. Фотокосплей
Новый вид искусства. Фотокосплей Чудеса света
Чудеса света Презентация на тему Первое знакомство с вероятностью
Презентация на тему Первое знакомство с вероятностью НДР Ефективність розвитку виноградарства
НДР Ефективність розвитку виноградарства Юридические проблемы при проведении подрядных торгов
Юридические проблемы при проведении подрядных торгов День защитника Отечества
День защитника Отечества Paraisten Elite Соревнования проводятся с 18-19. Сентябрья 2010
Paraisten Elite Соревнования проводятся с 18-19. Сентябрья 2010 Презентация на тему Аргентина
Презентация на тему Аргентина 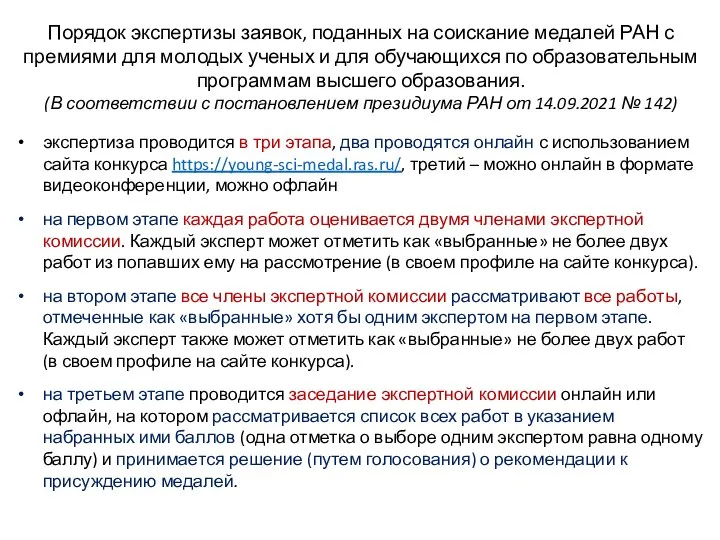 Инструкция эксперта
Инструкция эксперта Кейс Страховой случай
Кейс Страховой случай Retell. Превращаем статьи в подкасты
Retell. Превращаем статьи в подкасты Правовое положение и полномочия палат
Правовое положение и полномочия палат Урок 28Урок 28Урок 28Урок 28 ЯРГ2007-2008Кохтла-ЯрвеЭстония. - презентация
Урок 28Урок 28Урок 28Урок 28 ЯРГ2007-2008Кохтла-ЯрвеЭстония. - презентация АО Порт Самара
АО Порт Самара Диагностика результатов труда учителя как показатель его профессиональных достижений
Диагностика результатов труда учителя как показатель его профессиональных достижений Презентация на тему Условные знаки
Презентация на тему Условные знаки London zoo
London zoo Здравствуй, школа
Здравствуй, школа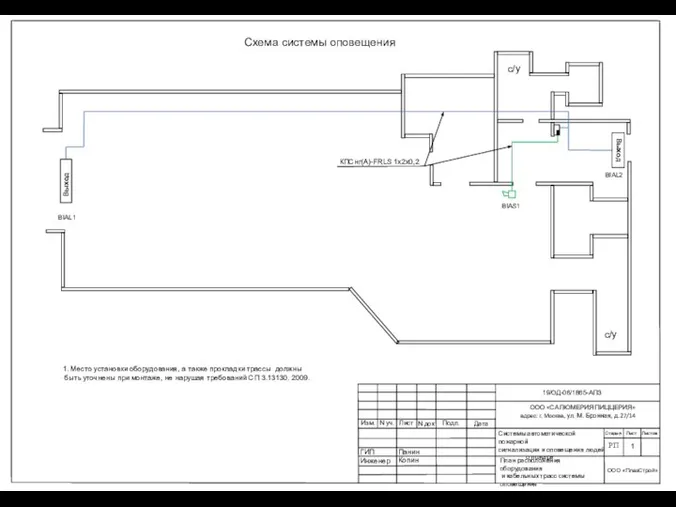 Схема системы оповещения
Схема системы оповещения Объект долевого строительства на территории города Азова, где возможно появление обманутых дольщиков
Объект долевого строительства на территории города Азова, где возможно появление обманутых дольщиков Бескаркаская мебель
Бескаркаская мебель Географические названия Великобритании
Географические названия Великобритании «Подготовка отчета некоммерческой организацией» Ведущие семинара: Совейко Алена Николаевна - специалист отдела по делам некомме
«Подготовка отчета некоммерческой организацией» Ведущие семинара: Совейко Алена Николаевна - специалист отдела по делам некомме Создание проекта. Шаблон
Создание проекта. Шаблон Общее собрание трудового коллектива 12.03.2019 г
Общее собрание трудового коллектива 12.03.2019 г