- Микропроцессорные системы

Содержание
- 3. ШИМ
- 5. ШИМ (ШИРОТНО ИМПУЛЬСНАЯ МОДУЛЯЦИЯ) PWM — Pulse Width Modulation ШИМ — методика формирования сигнала, основанная на
- 6. Частота следования импульсов – количество полных импульсов в единицу времени. Период импульсов – промежуток времени между
- 7. ОДНОПОЛЯРНЫЙ И ДВУХПОЛЯРНЫЙ ШИМ
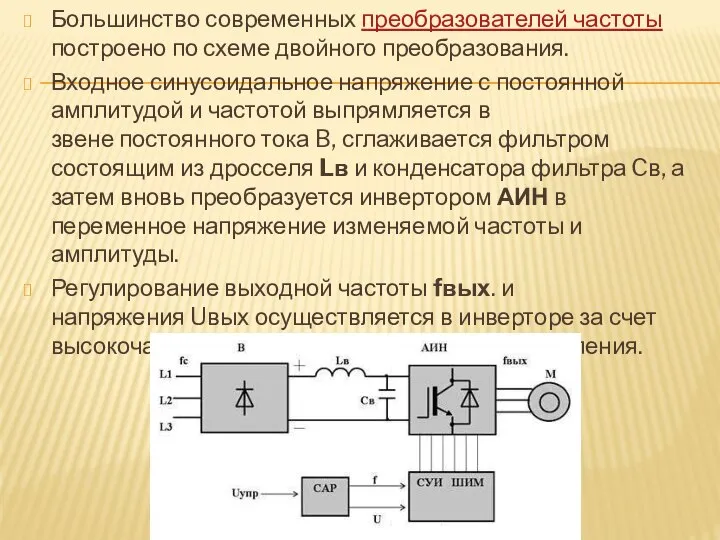
- 11. Большинство современных преобразователей частоты построено по схеме двойного преобразования. Входное синусоидальное напряжение с постоянной амплитудой и
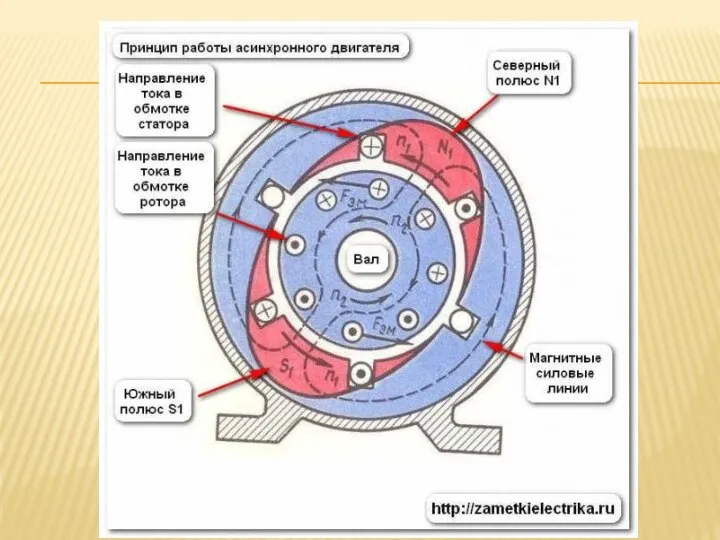
- 13. Скалярное управление асинхронным двигателем - связанное изменение амплитуды и частоты напряжения статора в зависимости от требуемого
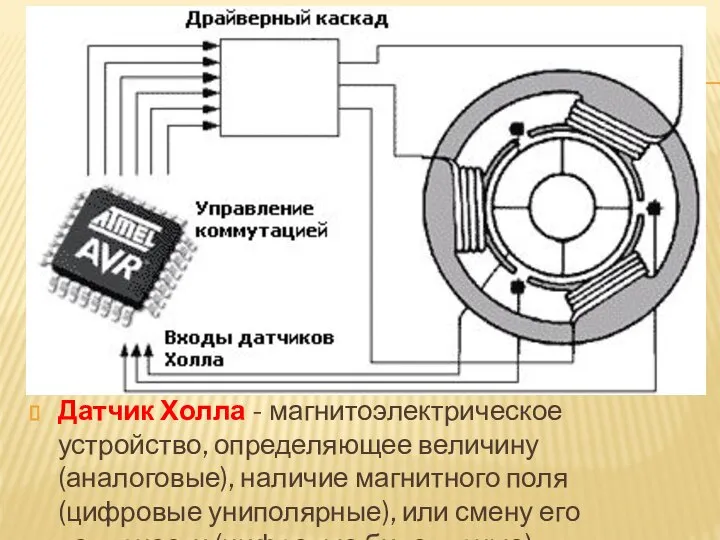
- 20. Датчик Холла - магнитоэлектрическое устройство, определяющее величину (аналоговые), наличие магнитного поля (цифровые униполярные), или смену его
- 23. ARDUINO
- 24. 8-BIT TIMER/COUNTER0 WITH PWM
- 25. У таймера есть особый регистр сравнения OCR** Когда значение в счётном регистре таймера достигает значения в
- 26. Настроим ШИМ-генератор следующим образом: когда значение в счетном регистре больше чем в регистре сравнения, то на
- 28. РЕЖИМЫ ШИМ ATMEGA Fast PWM Счетчик считает от 0 до 255, после переполнения сбрасывается в 0
- 30. РЕЖИМЫ ШИМ ATMEGA Phase Correct PWM Счетчик считает от 0 до 255, потом от 255 до
- 33. РЕЖИМЫ ШИМ ATMEGA Clear Timer On Compare (CTC) (Сброс при сравнении) ЧИМ — частотно-импульсно моделированный сигнал.
- 36. TIMER1 Fast PWM – Phase Correct PWM – Fast PWM
- 38. Скачать презентацию

Слайд 3ШИМ
ШИМ
Слайд 5ШИМ (ШИРОТНО ИМПУЛЬСНАЯ МОДУЛЯЦИЯ)
PWM — Pulse Width Modulation
ШИМ — методика формирования сигнала, основанная на
ШИМ (ШИРОТНО ИМПУЛЬСНАЯ МОДУЛЯЦИЯ)
PWM — Pulse Width Modulation
ШИМ — методика формирования сигнала, основанная на

Слайд 6Частота следования импульсов – количество полных импульсов в единицу времени.
Период импульсов –
Частота следования импульсов – количество полных импульсов в единицу времени.
Период импульсов –

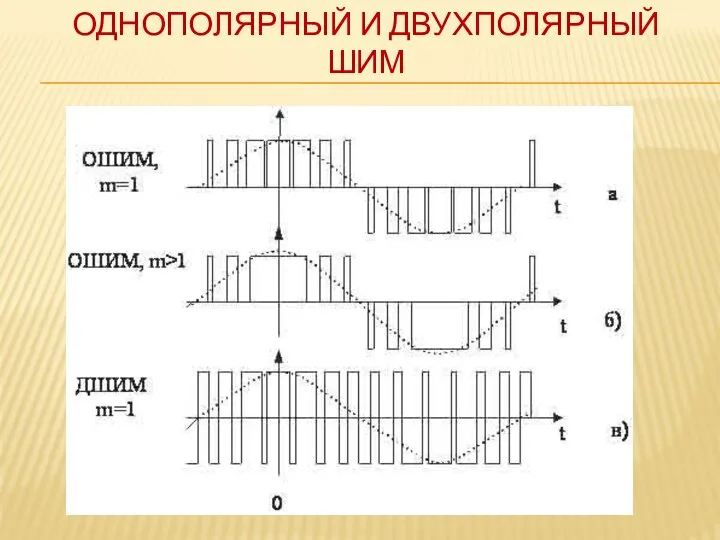
Слайд 7ОДНОПОЛЯРНЫЙ И ДВУХПОЛЯРНЫЙ ШИМ
ОДНОПОЛЯРНЫЙ И ДВУХПОЛЯРНЫЙ ШИМ
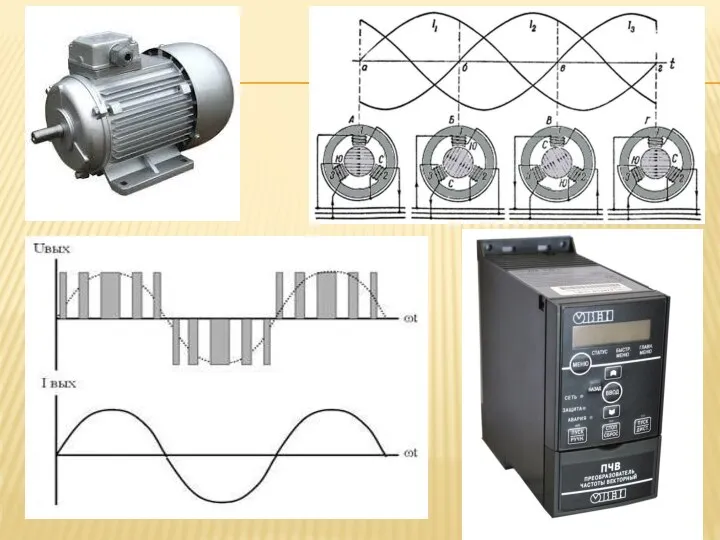
Слайд 11Большинство современных преобразователей частоты построено по схеме двойного преобразования.
Входное синусоидальное напряжение с постоянной амплитудой
Большинство современных преобразователей частоты построено по схеме двойного преобразования.
Входное синусоидальное напряжение с постоянной амплитудой
Слайд 13Скалярное управление асинхронным двигателем - связанное изменение амплитуды и частоты напряжения статора
Скалярное управление асинхронным двигателем - связанное изменение амплитуды и частоты напряжения статора

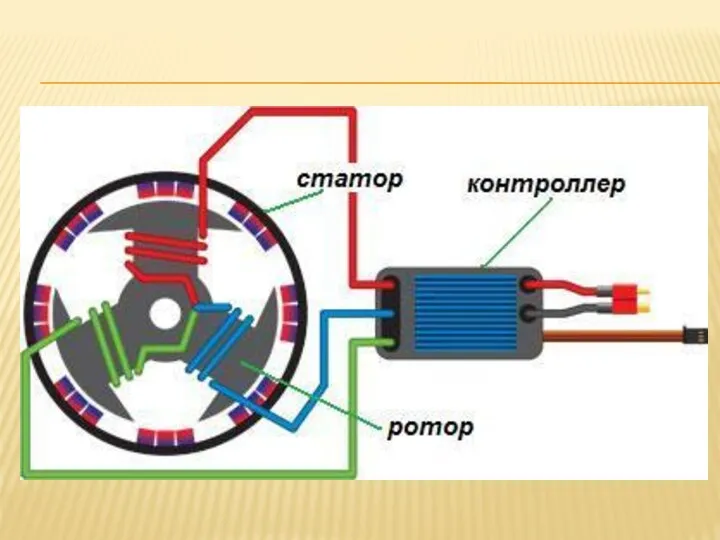

Слайд 20Датчик Холла - магнитоэлектрическое устройство, определяющее величину (аналоговые), наличие магнитного поля (цифровые
Датчик Холла - магнитоэлектрическое устройство, определяющее величину (аналоговые), наличие магнитного поля (цифровые
Слайд 23ARDUINO
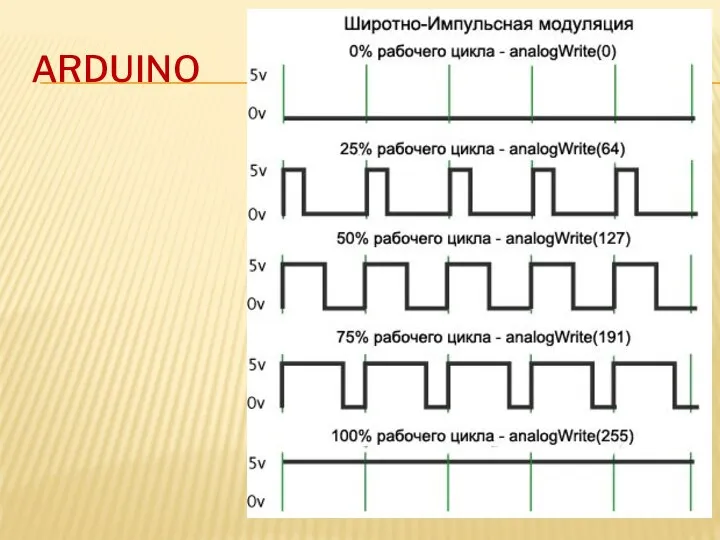
ARDUINO
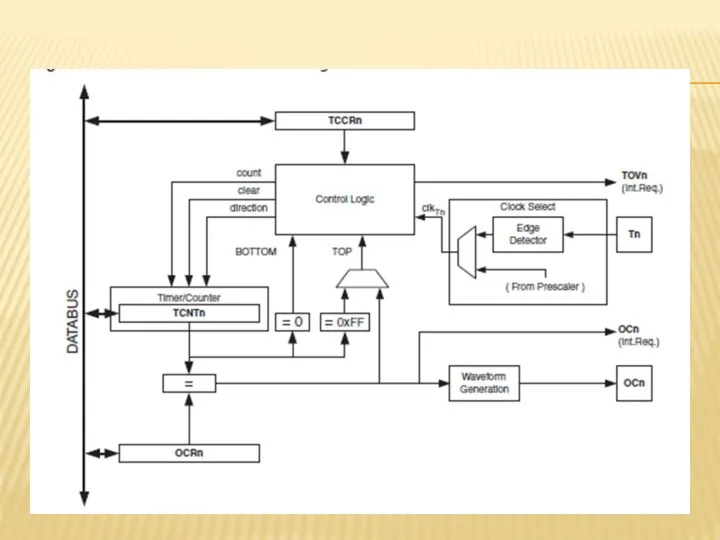
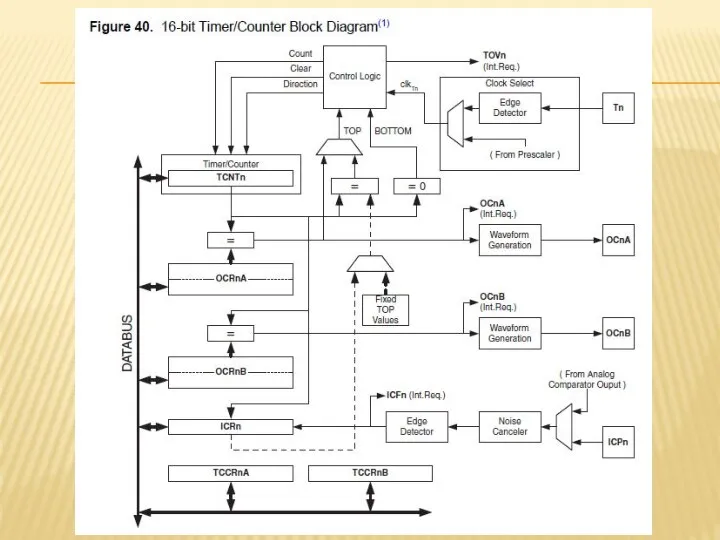
Слайд 248-BIT TIMER/COUNTER0 WITH PWM
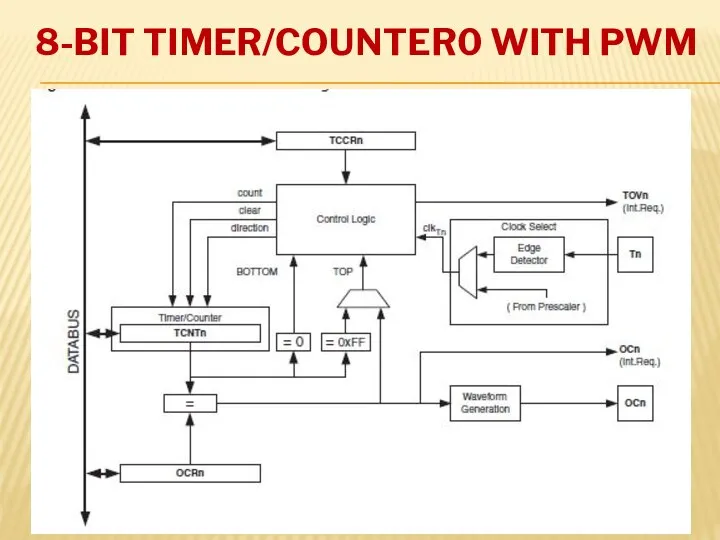
8-BIT TIMER/COUNTER0 WITH PWM
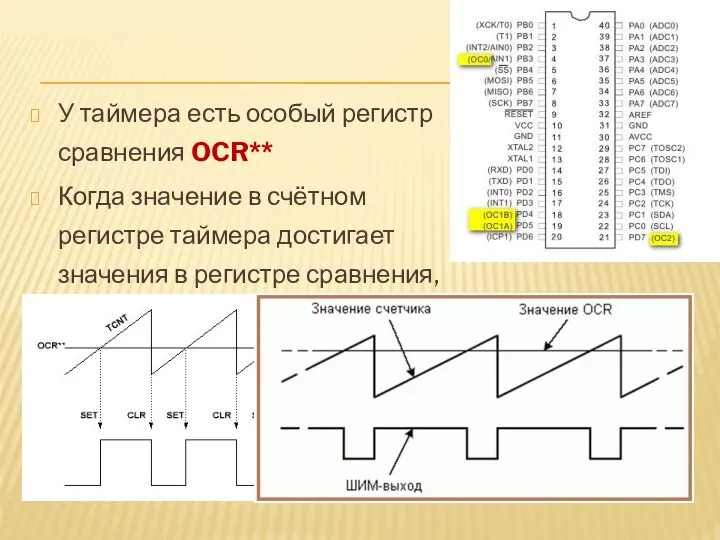
Слайд 25У таймера есть особый регистр
сравнения OCR**
Когда значение в счётном
регистре таймера
У таймера есть особый регистр
сравнения OCR**
Когда значение в счётном
регистре таймера
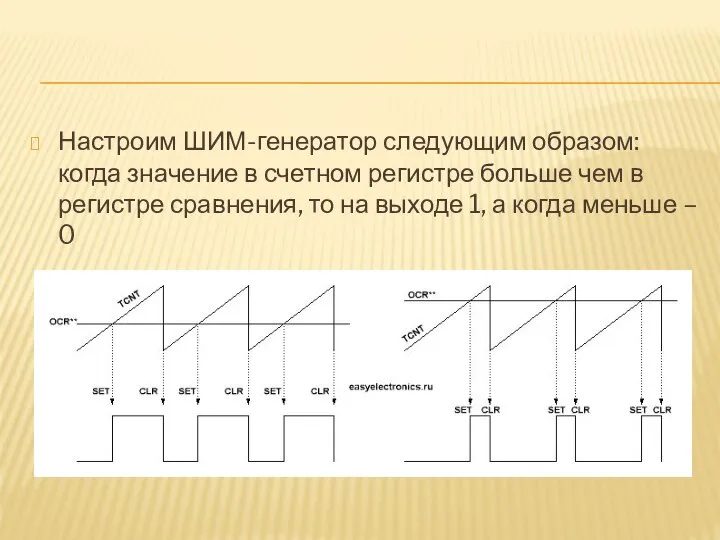
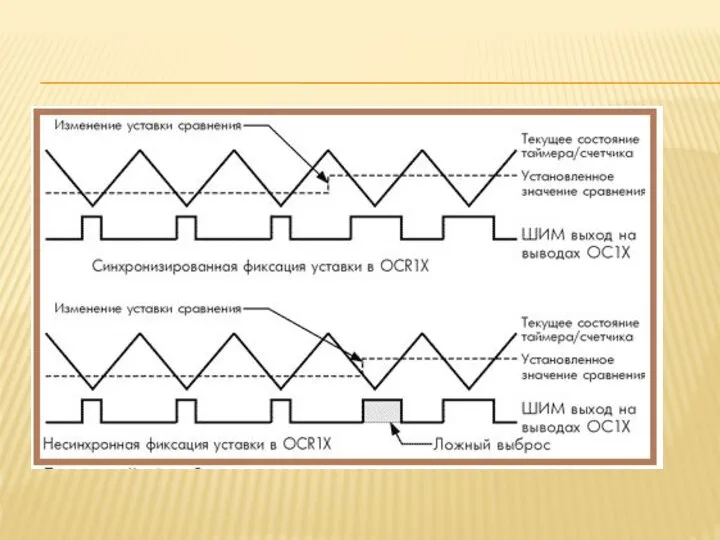
Слайд 26Настроим ШИМ-генератор следующим образом:
когда значение в счетном регистре больше чем в
Настроим ШИМ-генератор следующим образом: когда значение в счетном регистре больше чем в
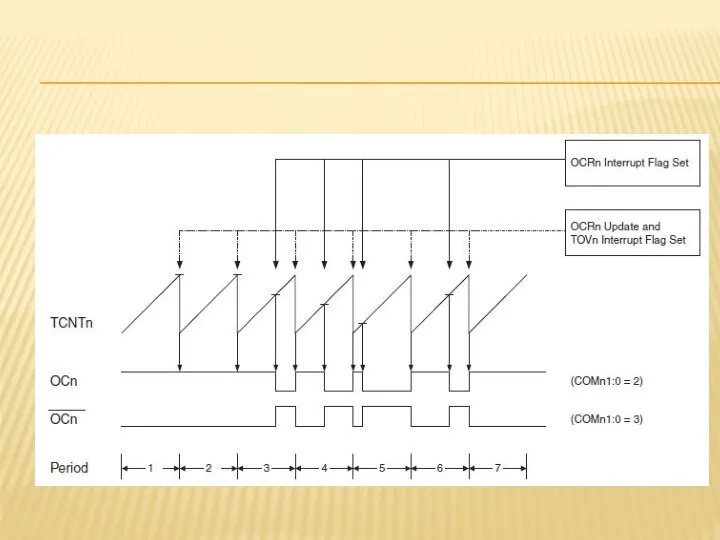
Слайд 28РЕЖИМЫ ШИМ ATMEGA
Fast PWM
Счетчик считает от 0 до 255, после переполнения сбрасывается в
РЕЖИМЫ ШИМ ATMEGA
Fast PWM Счетчик считает от 0 до 255, после переполнения сбрасывается в
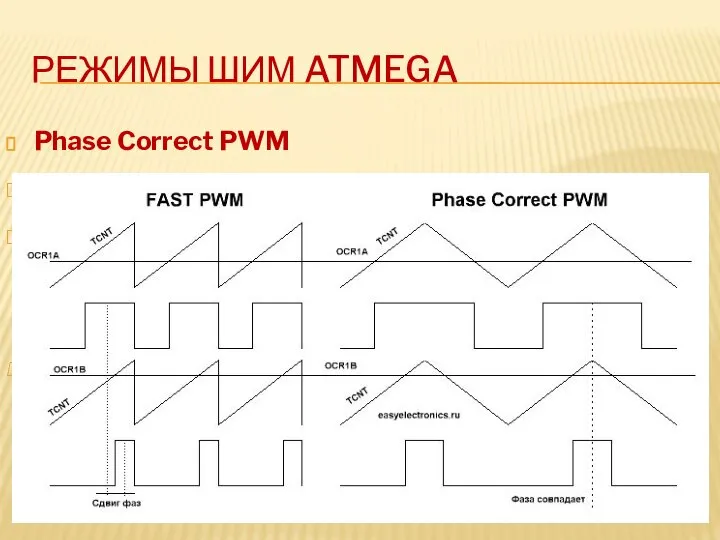
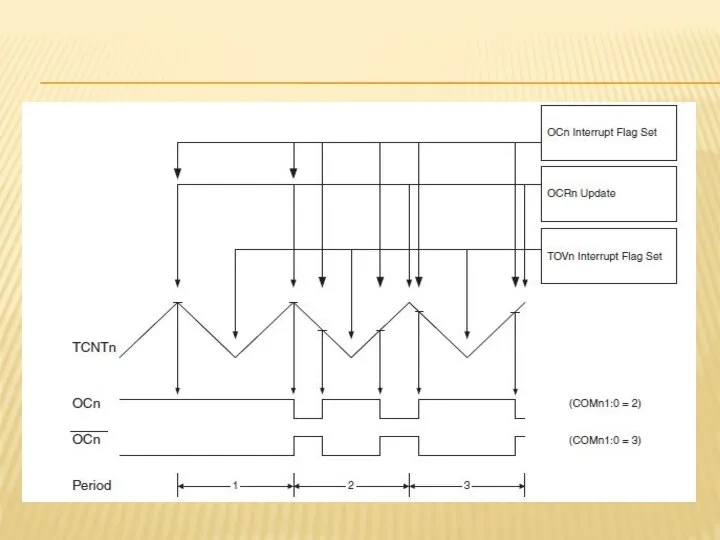
Слайд 30РЕЖИМЫ ШИМ ATMEGA
Phase Correct PWM
Счетчик считает от 0 до 255, потом от
РЕЖИМЫ ШИМ ATMEGA
Phase Correct PWM
Счетчик считает от 0 до 255, потом от
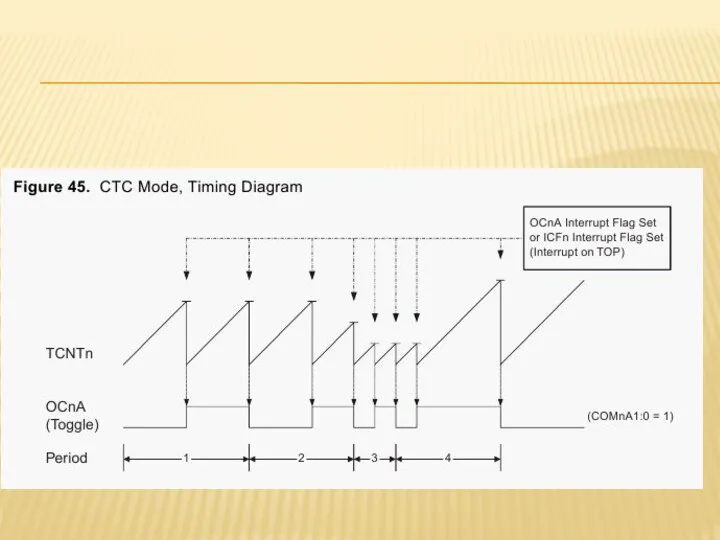
Слайд 33РЕЖИМЫ ШИМ ATMEGA
Clear Timer On Compare (CTC)
(Сброс при сравнении)
ЧИМ — частотно-импульсно
РЕЖИМЫ ШИМ ATMEGA
Clear Timer On Compare (CTC)
(Сброс при сравнении)
ЧИМ — частотно-импульсно
Слайд 36TIMER1
Fast PWM – Phase Correct PWM – Fast PWM
TIMER1
Fast PWM – Phase Correct PWM – Fast PWM
 Презентация на тему Водяной пар Влажность воздуха
Презентация на тему Водяной пар Влажность воздуха Интерактивные вебинары как новая форма учебной деятельности http://webinar.ffl.msu.ru
Интерактивные вебинары как новая форма учебной деятельности http://webinar.ffl.msu.ru Математический турнир
Математический турнир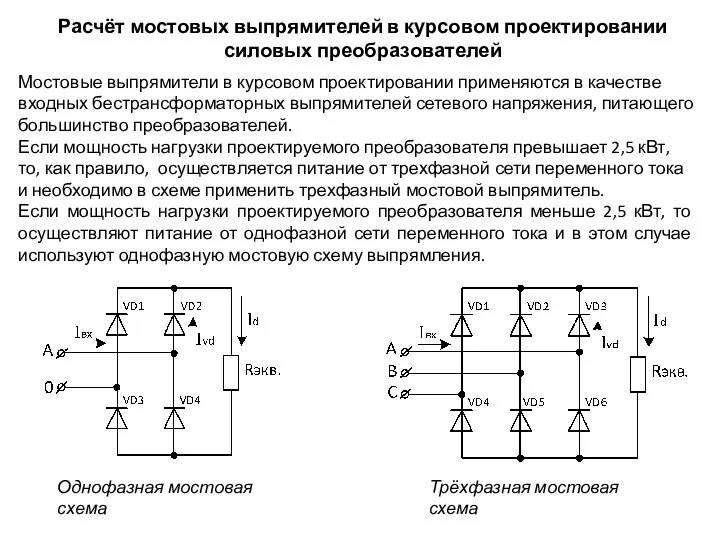 Расчёт мостовых выпрямителей в курсовом проектировании силовых преобразователей
Расчёт мостовых выпрямителей в курсовом проектировании силовых преобразователей A day in London
A day in London Приоритетный национальный проект "ОБРАЗОВАНИЕ"
Приоритетный национальный проект "ОБРАЗОВАНИЕ" Преобразование внутреннего школьного пространства
Преобразование внутреннего школьного пространства What language do dolphins speak?
What language do dolphins speak? Аминокислоты Модели молекул
Аминокислоты Модели молекул Сущность аттестации персонала. Проведение аттестации
Сущность аттестации персонала. Проведение аттестации Циклотимный тип личности
Циклотимный тип личности Дикое поле 1992
Дикое поле 1992 Базовый курс работы с кожей. Пошив сумок и одежды
Базовый курс работы с кожей. Пошив сумок и одежды Презентация на тему Основные периоды формирования политической карты мира
Презентация на тему Основные периоды формирования политической карты мира Быть в 10 раз эффективнее благодаря Groovy
Быть в 10 раз эффективнее благодаря Groovy ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ПЕРЕРАБОТКИ ВАНАДИЕВОГО ЧУГУНА НА НТМК
ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ПЕРЕРАБОТКИ ВАНАДИЕВОГО ЧУГУНА НА НТМК Рисование диких кошек
Рисование диких кошек Политические партии
Политические партии Презентация на тему Алгоритмы сжатия. Алгоритм построения орграфа Хаффмана
Презентация на тему Алгоритмы сжатия. Алгоритм построения орграфа Хаффмана Презентация на тему Начало распада Древнерусского государства
Презентация на тему Начало распада Древнерусского государства  Былина – эпическая форма фольклора
Былина – эпическая форма фольклора Перспективы развития платежной системы Банка России в свете Федерального закона «О национальной платежной системе»
Перспективы развития платежной системы Банка России в свете Федерального закона «О национальной платежной системе» План проведения педагогического совета 1. Вступление. Анализ выполнения решений предыдущего педагогического совета. 2. Доклад «Сти
План проведения педагогического совета 1. Вступление. Анализ выполнения решений предыдущего педагогического совета. 2. Доклад «Сти Презентация на тему Пастернак Доктор Живаго
Презентация на тему Пастернак Доктор Живаго  поговорим о вежливости
поговорим о вежливости 01- System Overview Rev A
01- System Overview Rev A 2 часть
2 часть Политическая сфера
Политическая сфера