- Моделирование режимов работы упругой электромеханической системы ленточного конвейера

Содержание
- 2. Исследование режимов работы электропривода конвейерной установки на базе системы ПЧ - АД с учетом упругости ленты
- 3. Ленточные конвейеры относятся к группе промышленных установок, для которых характерно наличие упругих механических звеньев с распределенными
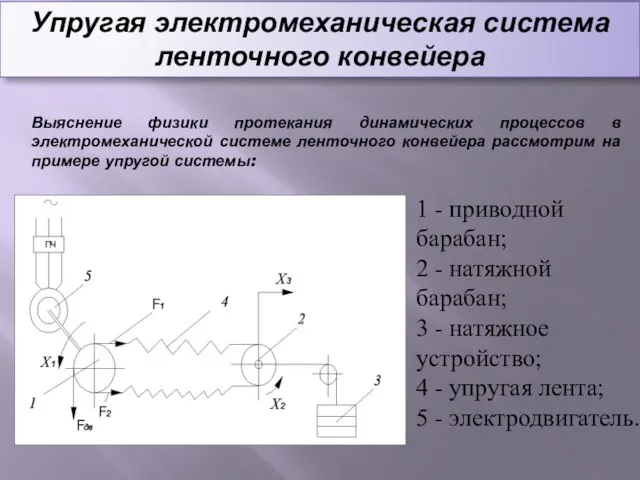
- 4. Выяснение физики протекания динамических процессов в электромеханической системе ленточного конвейера рассмотрим на примере упругой системы: Упругая
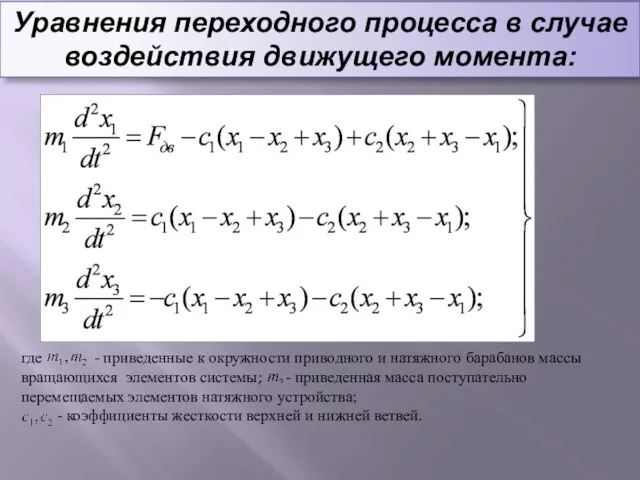
- 5. Уравнения переходного процесса в случае воздействия движущего момента: где - приведенные к окружности приводного и натяжного
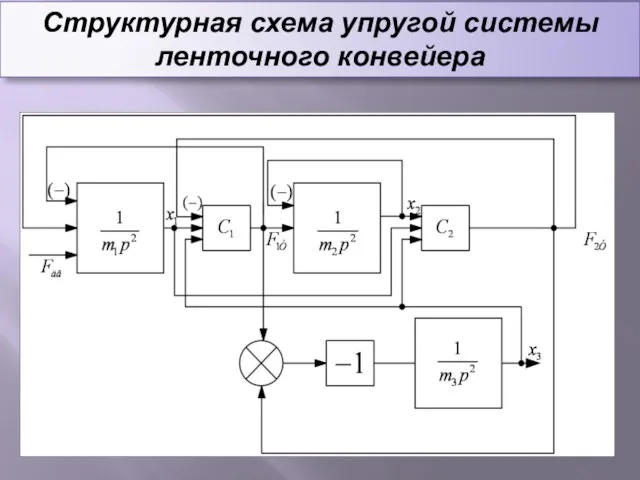
- 6. Структурная схема упругой системы ленточного конвейера
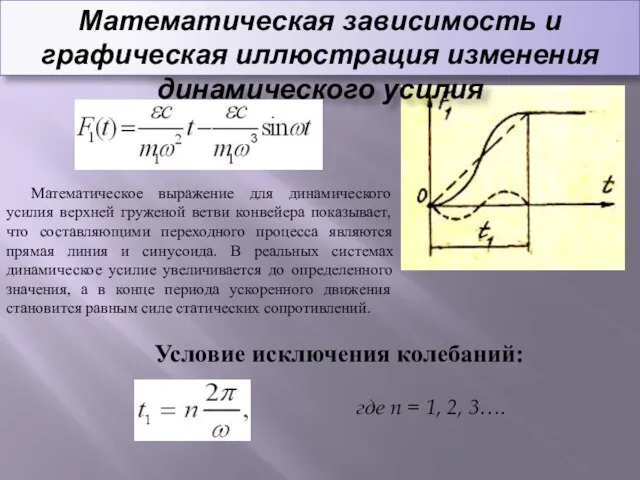
- 7. Математическая зависимость и графическая иллюстрация изменения динамического усилия Математическое выражение для динамического усилия верхней груженой ветви
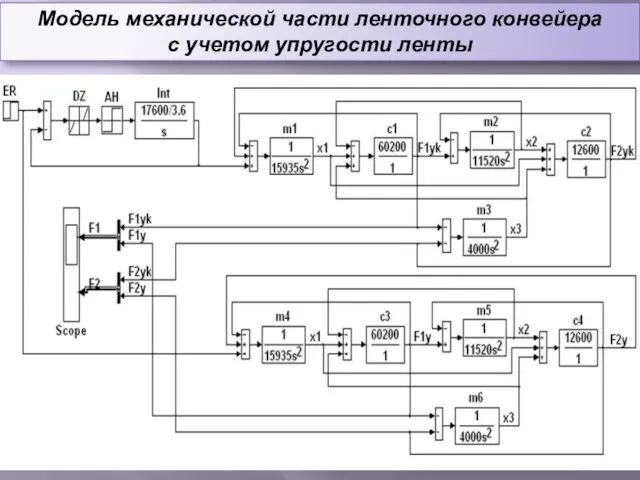
- 8. Модель механической части ленточного конвейера с учетом упругости ленты
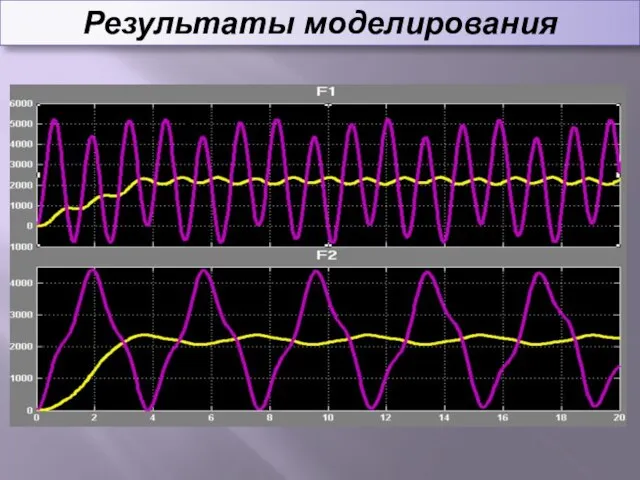
- 9. Результаты моделирования
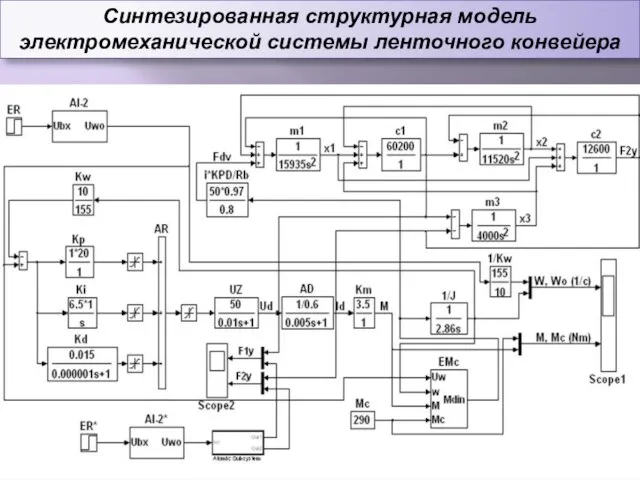
- 10. Синтезированная структурная модель электромеханической системы ленточного конвейера
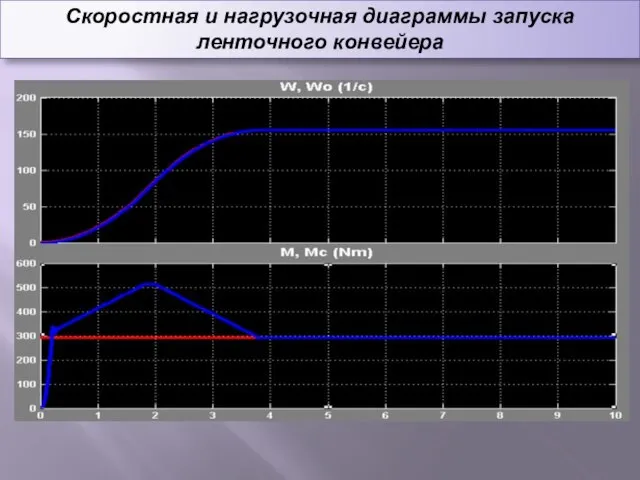
- 11. Скоростная и нагрузочная диаграммы запуска ленточного конвейера
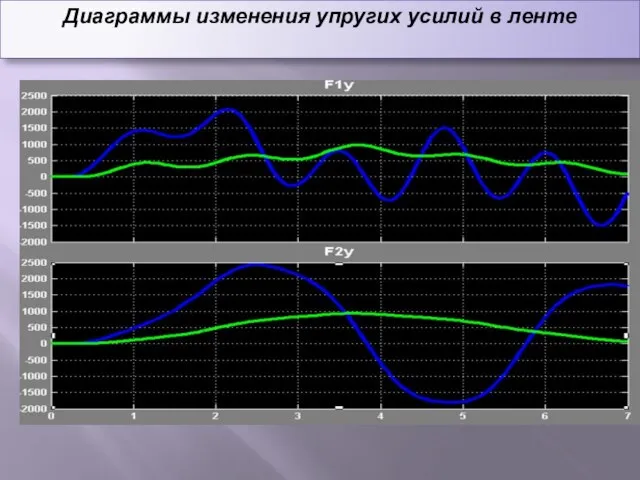
- 12. Диаграммы изменения упругих усилий в ленте
- 13. Выводы Анализ основных математических зависимостей доказывает наличие упругих колебаний в конвейерной ленте. Результаты моделирования механической системы
- 15. Скачать презентацию
Слайд 3Ленточные конвейеры относятся к группе промышленных установок, для которых характерно наличие упругих
Ленточные конвейеры относятся к группе промышленных установок, для которых характерно наличие упругих
Слайд 4
Выяснение физики протекания динамических процессов в электромеханической системе ленточного конвейера рассмотрим на
Выяснение физики протекания динамических процессов в электромеханической системе ленточного конвейера рассмотрим на
Слайд 5Уравнения переходного процесса в случае воздействия движущего момента:
где - приведенные к окружности
Уравнения переходного процесса в случае воздействия движущего момента:
где - приведенные к окружности
Слайд 6Структурная схема упругой системы ленточного конвейера
Структурная схема упругой системы ленточного конвейера
Слайд 7Математическая зависимость и графическая иллюстрация изменения динамического усилия
Математическое выражение для динамического усилия
Математическая зависимость и графическая иллюстрация изменения динамического усилия
Математическое выражение для динамического усилия
Слайд 8Модель механической части ленточного конвейера с учетом упругости ленты
Модель механической части ленточного конвейера с учетом упругости ленты
Слайд 9Результаты моделирования
Результаты моделирования
Слайд 10Синтезированная структурная модель электромеханической системы ленточного конвейера
Синтезированная структурная модель электромеханической системы ленточного конвейера
Слайд 11Скоростная и нагрузочная диаграммы запуска ленточного конвейера
Скоростная и нагрузочная диаграммы запуска ленточного конвейера
Слайд 12Диаграммы изменения упругих усилий в ленте
Диаграммы изменения упругих усилий в ленте
Слайд 13Выводы
Анализ основных математических зависимостей доказывает наличие упругих колебаний в конвейерной ленте.
Выводы
Анализ основных математических зависимостей доказывает наличие упругих колебаний в конвейерной ленте.
 Психология личности. Подходы
Психология личности. Подходы Портрет в годы Великой Отечественной Войны
Портрет в годы Великой Отечественной Войны лекция 1
лекция 1 О вы, служительницы Музы!
О вы, служительницы Музы! Устройство на компютъра
Устройство на компютъра А.Н Островского «Гроза»
А.Н Островского «Гроза» Современное видение правовых основ государства устойчивого развития
Современное видение правовых основ государства устойчивого развития Пособия ФСС по-новому
Пособия ФСС по-новому Мировая практика применения индекса цитирования при проведении и оценке научных исследованийчасть 2
Мировая практика применения индекса цитирования при проведении и оценке научных исследованийчасть 2 Сечение поверхностей плоскостью. Тело с вырезом
Сечение поверхностей плоскостью. Тело с вырезом 254119
254119 Презентация на тему Коллоидная химия
Презентация на тему Коллоидная химия Основные образовательные парадигмы
Основные образовательные парадигмы Регата для парусных яхт по маршруту Санкт-Петербург — Котка
Регата для парусных яхт по маршруту Санкт-Петербург — Котка Роль участкового специалиста в обеспечении социальных гарантий и мер социальной поддержки отдельных категорий граждан
Роль участкового специалиста в обеспечении социальных гарантий и мер социальной поддержки отдельных категорий граждан Учимся не путать звуки [ с ] и [ ч ]
Учимся не путать звуки [ с ] и [ ч ] ChefАвтоматизация в Облаках
ChefАвтоматизация в Облаках В гости к зиме. Неживая природа зимой
В гости к зиме. Неживая природа зимой Противодействие идеологии терроризма, экстремизма и гармонизация межнациональных отношений
Противодействие идеологии терроризма, экстремизма и гармонизация межнациональных отношений Презентация на тему Золотая осень. Составление рассказа
Презентация на тему Золотая осень. Составление рассказа Мотострелковый взвод в обороне
Мотострелковый взвод в обороне Процессуальные теории мотивации
Процессуальные теории мотивации 12-psihosomatika-vozrastnih-izmeneniy-lica
12-psihosomatika-vozrastnih-izmeneniy-lica Культура та первісні вірування людей
Культура та первісні вірування людей Оборудования лаборатории
Оборудования лаборатории Презентация на тему Промышленные отходы
Презентация на тему Промышленные отходы  Дистанционный курс: разработка, построение, проведение
Дистанционный курс: разработка, построение, проведение Polyester. Synthetic Fibres the Fabric of Society
Polyester. Synthetic Fibres the Fabric of Society