О принципах построения обучаемой системы управления для интеллектуальных роботов на основе динамического ДСМ-метода
- О принципах построения обучаемой системы управления для интеллектуальных роботов на основе динамического ДСМ-метода

Содержание
- 2. 3 поколения роботов: Программные. Жестко заданная программа (циклограмма). Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться) в зависимости от
- 3. Архитектура интеллектуальных роботов Исполнительные органы Датчики Система управления Модель мира Система распознавания Система планирования действий Система
- 4. Роботы «Амур» Созданы в Творческой научно-технической лаборатории Политехнического музея. Целью проекта была демонстрация некоторых простейших форм
- 5. Задача – движение по полосе Добрынин Д.А., Карпов В.Э. Моделирование некоторых форм адаптивного поведения интеллектуальных роботов.//
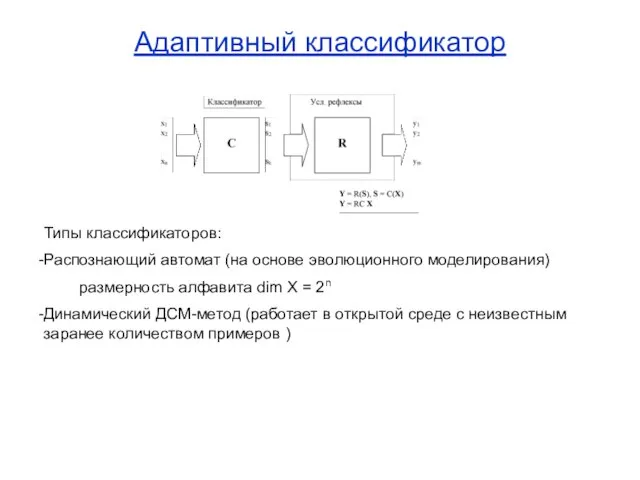
- 6. Адаптивный классификатор Типы классификаторов: Распознающий автомат (на основе эволюционного моделирования) размерность алфавита dim X = 2n
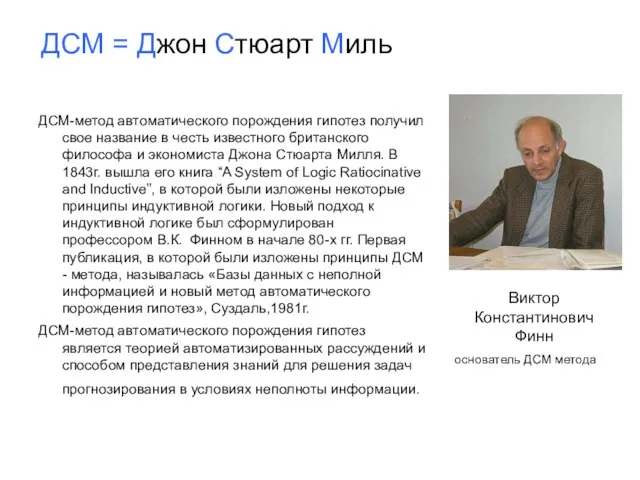
- 7. ДСМ-метод автоматического порождения гипотез получил свое название в честь известного британского философа и экономиста Джона Стюарта
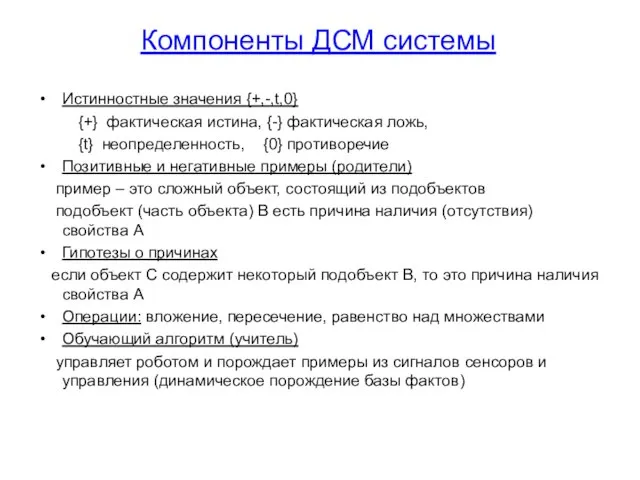
- 8. Компоненты ДСМ системы Истинностные значения {+,-,t,0} {+} фактическая истина, {-} фактическая ложь, {t} неопределенность, {0} противоречие
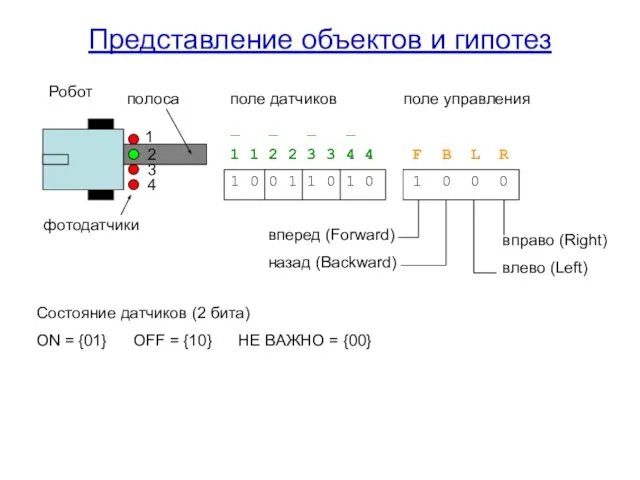
- 9. Представление объектов и гипотез Состояние датчиков (2 бита) ON = {01} OFF = {10} НЕ ВАЖНО
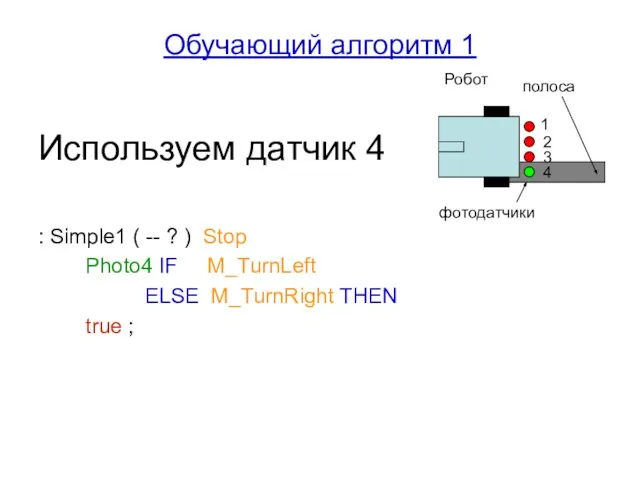
- 10. Обучающий алгоритм 1 Используем датчик 4 : Simple1 ( -- ? ) Stop Photo4 IF M_TurnLeft
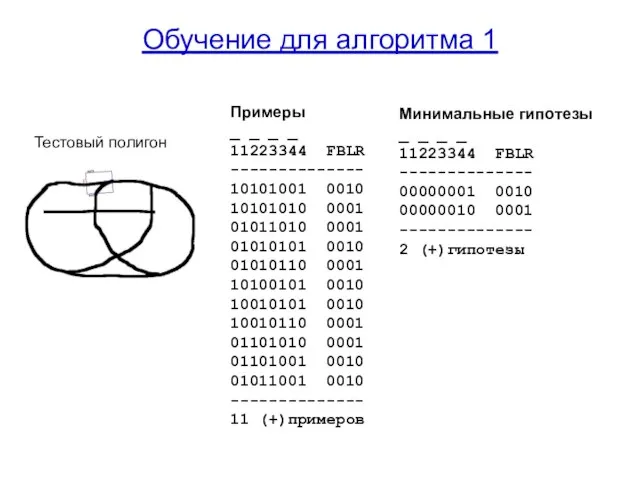
- 11. Обучение для алгоритма 1 Примеры _ _ _ _ 11223344 FBLR -------------- 10101001 0010 10101010 0001
- 12. На конференции САИТ-2005
- 13. Свойства динамического ДСМ Достаточность обучающих примеров. При наличии представительной выборки обучающих примеров оба метода дают хорошие
- 14. Свойства динамического ДСМ Динамическое обучение. Теоретически ЭМ может работать и в открытой среде с неизвестным заранее
- 15. Особенности реализации небольшая размерность входов и выходов. Как показывает практика, для обучения требуется, всего лишь три-пять
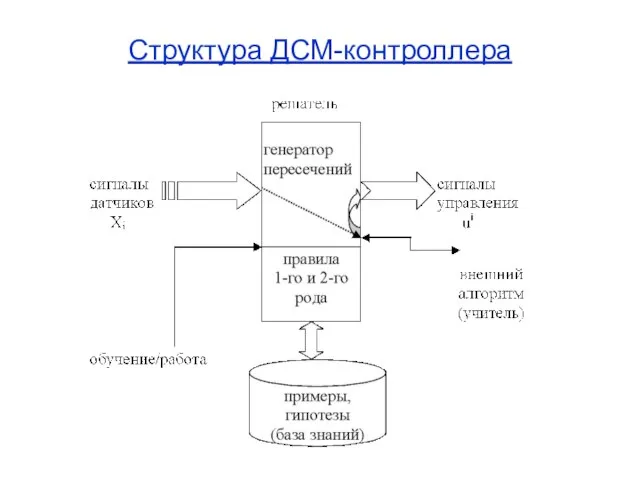
- 16. Структура ДСМ-контроллера
- 17. Особенности реализации ДСМ-контроллера микроконтроллер ATMega128 память программ 128Кбайт память данных 128Кбайт Flash память 256Кбайт тактовая частота
- 18. Сравнение ДСМ-системы и системы нечеткого вывода
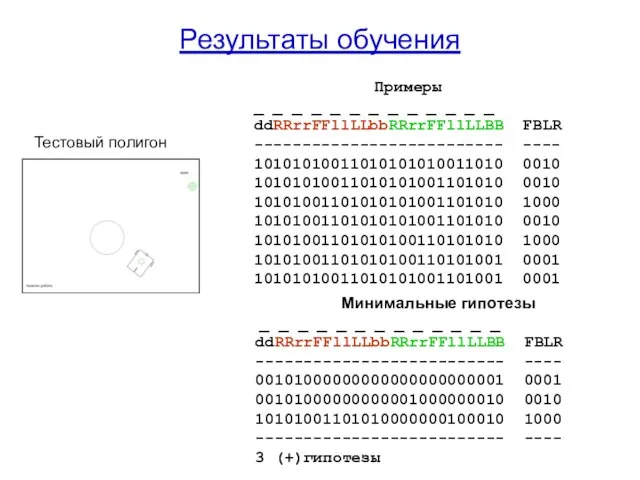
- 19. Результаты обучения Примеры _ _ _ _ _ _ _ _ _ _ _ _ _
- 20. Проблемы применения Необходимость представления входных данных в виде дискретного множества. Влияние разрядности входных данных на размерность
- 21. Переход к «нечеткому ДСМ» Идея использовать правила нечеткого вывода для ДСМ-метода принадлежит Анашакову О.М. : Anshakov
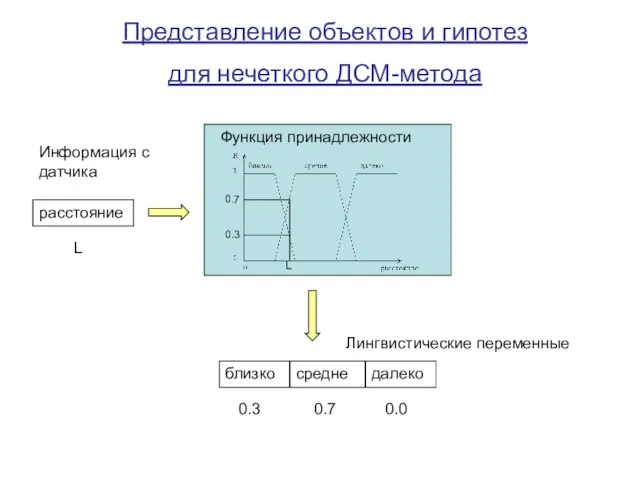
- 22. Представление объектов и гипотез для нечеткого ДСМ-метода
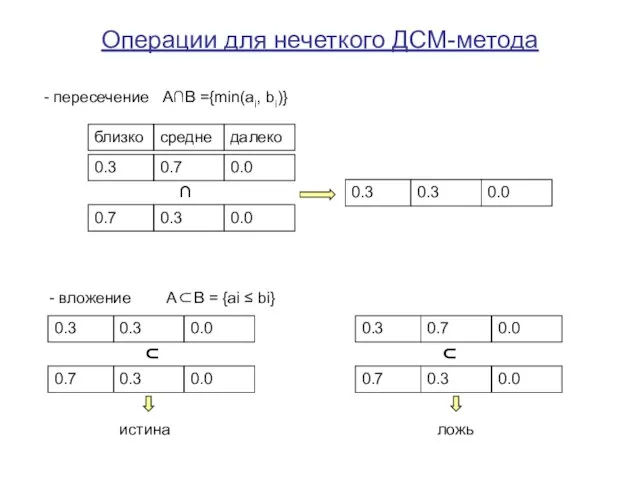
- 23. Операции для нечеткого ДСМ-метода
- 24. Целевые свойства атомарные целевые свойства {0, 1} «включить/выключить», «старт/стоп» непрерывные целевые свойства [0.0, 1.0] необходима операция
- 26. Скачать презентацию
Слайд 23 поколения роботов:
Программные. Жестко заданная программа (циклограмма).
Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться) в
3 поколения роботов:
Программные. Жестко заданная программа (циклограмма).
Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться) в

Слайд 3Архитектура интеллектуальных роботов
Исполнительные органы
Датчики
Система управления
Модель мира
Система распознавания
Система планирования действий
Система выполнения действий
Система управления
Архитектура интеллектуальных роботов
Исполнительные органы
Датчики
Система управления
Модель мира
Система распознавания
Система планирования действий
Система выполнения действий
Система управления
Слайд 4Роботы «Амур»
Созданы в Творческой научно-технической лаборатории Политехнического музея.
Целью проекта была
Роботы «Амур»
Созданы в Творческой научно-технической лаборатории Политехнического музея.
Целью проекта была

Слайд 5Задача – движение по полосе
Добрынин Д.А., Карпов В.Э.
Моделирование некоторых форм
Задача – движение по полосе
Добрынин Д.А., Карпов В.Э.
Моделирование некоторых форм

Слайд 6Адаптивный классификатор
Типы классификаторов:
Распознающий автомат (на основе эволюционного моделирования)
размерность алфавита dim X
Адаптивный классификатор
Типы классификаторов:
Распознающий автомат (на основе эволюционного моделирования)
размерность алфавита dim X
Слайд 7ДСМ-метод автоматического порождения гипотез получил свое название в честь известного британского философа
ДСМ-метод автоматического порождения гипотез получил свое название в честь известного британского философа
Слайд 8Компоненты ДСМ системы
Истинностные значения {+,-,t,0}
{+} фактическая истина, {-} фактическая ложь,
Компоненты ДСМ системы
Истинностные значения {+,-,t,0}
{+} фактическая истина, {-} фактическая ложь,
Слайд 9Представление объектов и гипотез
Состояние датчиков (2 бита)
ON = {01} OFF = {10}
Представление объектов и гипотез
Состояние датчиков (2 бита)
ON = {01} OFF = {10}
Слайд 10Обучающий алгоритм 1
Используем датчик 4
: Simple1 ( -- ? ) Stop
Обучающий алгоритм 1
Используем датчик 4
: Simple1 ( -- ? ) Stop
Слайд 11Обучение для алгоритма 1
Примеры
_ _ _ _
11223344 FBLR
--------------
10101001 0010
10101010 0001
01011010 0001
01010101
Обучение для алгоритма 1
Примеры
_ _ _ _
11223344 FBLR
--------------
10101001 0010
10101010 0001
01011010 0001
01010101
Слайд 12На конференции САИТ-2005
На конференции САИТ-2005

Слайд 13Свойства динамического ДСМ
Достаточность обучающих примеров. При наличии представительной выборки обучающих примеров оба
Свойства динамического ДСМ
Достаточность обучающих примеров. При наличии представительной выборки обучающих примеров оба
Слайд 14Свойства динамического ДСМ
Динамическое обучение. Теоретически ЭМ может работать и в открытой среде
Свойства динамического ДСМ
Динамическое обучение. Теоретически ЭМ может работать и в открытой среде
Слайд 15Особенности реализации
небольшая размерность входов и выходов. Как показывает практика, для обучения требуется,
Особенности реализации
небольшая размерность входов и выходов. Как показывает практика, для обучения требуется,
Слайд 16Структура ДСМ-контроллера
Структура ДСМ-контроллера
Слайд 17Особенности реализации
ДСМ-контроллера
микроконтроллер ATMega128
память программ 128Кбайт
память данных 128Кбайт
Flash память 256Кбайт
тактовая частота 7.3728Мгц
связь с хостом USB 2.0
дополнительный COM
Особенности реализации
ДСМ-контроллера
микроконтроллер ATMega128
память программ 128Кбайт
память данных 128Кбайт
Flash память 256Кбайт
тактовая частота 7.3728Мгц
связь с хостом USB 2.0
дополнительный COM

Слайд 18Сравнение ДСМ-системы и системы нечеткого вывода
Сравнение ДСМ-системы и системы нечеткого вывода

Слайд 19Результаты обучения
Примеры
_ _ _ _ _ _ _ _ _ _
Результаты обучения
Примеры
_ _ _ _ _ _ _ _ _ _
Слайд 20Проблемы применения
Необходимость представления входных данных в виде дискретного множества.
Влияние разрядности входных
Проблемы применения
Необходимость представления входных данных в виде дискретного множества.
Влияние разрядности входных
Слайд 21Переход к «нечеткому ДСМ»
Идея использовать правила нечеткого вывода для ДСМ-метода принадлежит Анашакову
Переход к «нечеткому ДСМ»
Идея использовать правила нечеткого вывода для ДСМ-метода принадлежит Анашакову
Слайд 22Представление объектов и гипотез
для нечеткого ДСМ-метода
Представление объектов и гипотез
для нечеткого ДСМ-метода
Слайд 23Операции для нечеткого ДСМ-метода
Операции для нечеткого ДСМ-метода
Слайд 24Целевые свойства
атомарные целевые свойства {0, 1} «включить/выключить», «старт/стоп»
непрерывные целевые свойства [0.0,
Целевые свойства
атомарные целевые свойства {0, 1} «включить/выключить», «старт/стоп»
непрерывные целевые свойства [0.0,
 Семинар классных руководителей Тема: «Педагогическое общение как особый вид творчества»
Семинар классных руководителей Тема: «Педагогическое общение как особый вид творчества» Какие 2 суперотрасли права принято выделять? По какому критерию относят к каждой из них отрасли права?
Какие 2 суперотрасли права принято выделять? По какому критерию относят к каждой из них отрасли права? 186231(1)
186231(1) Блюда из овощей припущенные и тушеные
Блюда из овощей припущенные и тушеные Как стильно носить мужскую рубашку
Как стильно носить мужскую рубашку Презентация на тему Группы крови в современном мире
Презентация на тему Группы крови в современном мире спортивный праздник "Папа, мама, я – дружная семья"
спортивный праздник "Папа, мама, я – дружная семья" Акушерские кровотечения
Акушерские кровотечения Карандашница
Карандашница Система морально-психологического обеспечения деятельности органов внутренних дел Российской Федерации
Система морально-психологического обеспечения деятельности органов внутренних дел Российской Федерации Илларион Михайлович Прянишников (1840-1894)
Илларион Михайлович Прянишников (1840-1894) Let’s practice
Let’s practice Особенности речи юриста в ходе разбирательства гражданских и административных дел
Особенности речи юриста в ходе разбирательства гражданских и административных дел Фотограф
Фотограф Леонардо
Леонардо Интересы инноваторов и инвесторов в коммуникации с научными группами: открытость, принципы и формат сотрудничества
Интересы инноваторов и инвесторов в коммуникации с научными группами: открытость, принципы и формат сотрудничества « СПОСОБ ГРУППИРОВКИ»
« СПОСОБ ГРУППИРОВКИ» Край ты мой, родимый край! Стихи русских поэтов 19века о родной природе
Край ты мой, родимый край! Стихи русских поэтов 19века о родной природе Причины преобладания заказов иностранных производителей в бюджетах российских рекламных агентств Презентацию подготовил Студе
Причины преобладания заказов иностранных производителей в бюджетах российских рекламных агентств Презентацию подготовил Студе Исследование микропроцессорных устройств LOGO!
Исследование микропроцессорных устройств LOGO! «Я, (фамилия, имя, отчество), торжественно присягаю на верность своей Родине Российской Федерации… Клянусь достойно выполня
«Я, (фамилия, имя, отчество), торжественно присягаю на верность своей Родине Российской Федерации… Клянусь достойно выполня Корпоративная стратегия и регулирование
Корпоративная стратегия и регулирование Вернисаж Люби! Твори! Живи!
Вернисаж Люби! Твори! Живи! Автор: Копытина Н.А., учитель информатики Г(О)ОУ НПО ПУ № 17 с. Хлевное Хлевенского района Липецкой области
Автор: Копытина Н.А., учитель информатики Г(О)ОУ НПО ПУ № 17 с. Хлевное Хлевенского района Липецкой области Prezentatsia
Prezentatsia Как руководитель ищет работника
Как руководитель ищет работника У истоков механики
У истоков механики Неликвидные запасы предприятия
Неликвидные запасы предприятия