- Основы автоматики

Содержание
- 2. Занятие №1. Общие сведения о системах автоматики .
- 3. Учебные цели: Изучить принцип работы автоматической следящей системы Ознакомиться с принципом работы вращающихся трансформаторов. Учебные цели:
- 4. 1. Принцип работы автоматической следящей системы . 2. Индикаторные синхронные передачи. 3. Принцип работы вращающихся трансформаторов.
- 5. Принцип работы автоматической следящей системы ВОПРОС №1 ВОПРОС №1
- 6. Следящие системы - системы автоматического регулирования, в которых задающее воздействие изменяется по неизвестному заранее закону и
- 7. Состав следящей системы Задающий элемент (датчик). 2. Измерительный элемент. 3. Преобразующий элемент. 4. Усилительный элемент. 5.
- 8. Принцип работы следящих систем. X ΔU Под действием задающего воздействия X, задающий элемент 1 вырабатывает управляющее
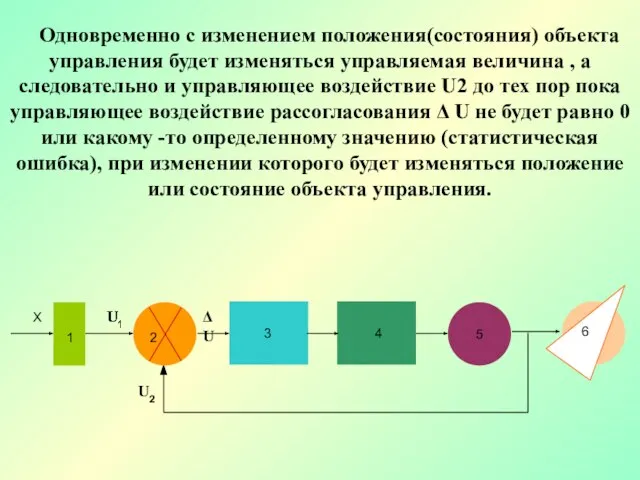
- 9. Одновременно с изменением положения(состояния) объекта управления будет изменяться управляемая величина , а следовательно и управляющее воздействие
- 10. Индикаторные синхронные передачи ВОПРОС №1 ВОПРОС №2
- 11. В радиолокационных станциях для передачи на большие расстояния данных дальности, азимута и угла места широко применяются
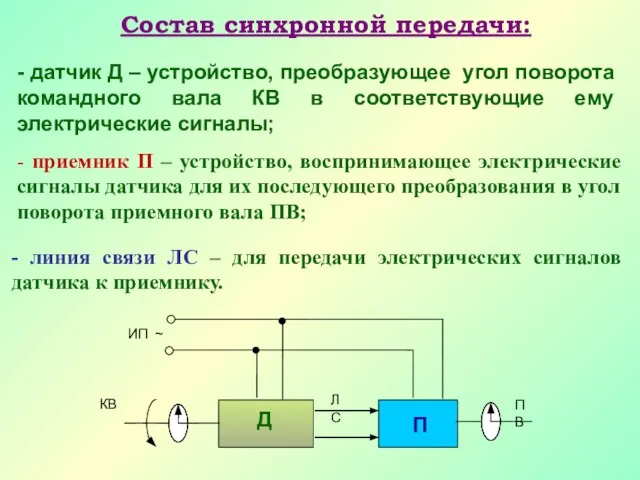
- 12. Состав синхронной передачи: - датчик Д – устройство, преобразующее угол поворота командного вала КВ в соответствующие
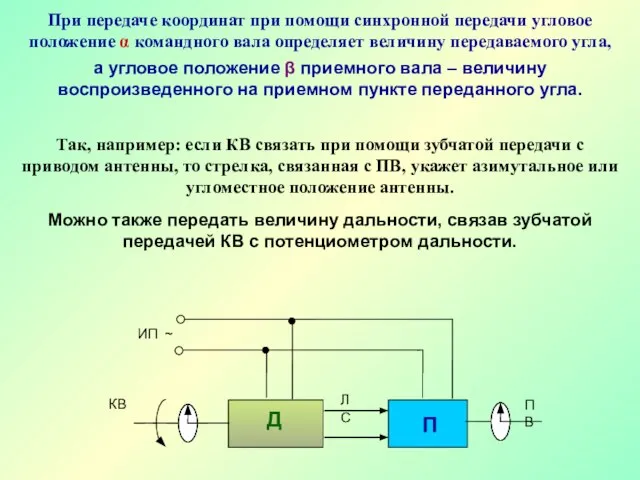
- 13. При передаче координат при помощи синхронной передачи угловое положение α командного вала определяет величину передаваемого угла,
- 14. В автоматике радиолокационных систем наиболее часто применяют индукционные синхронные передачи. В качестве датчиков и приемников в
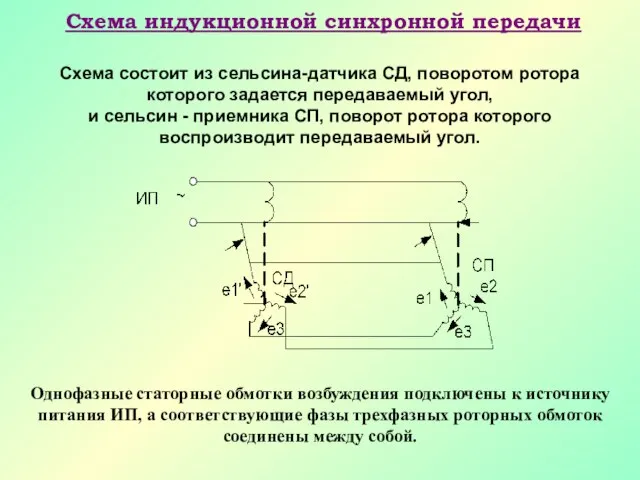
- 15. Схема состоит из сельсина-датчика СД, поворотом ротора которого задается передаваемый угол, и сельсин - приемника СП,
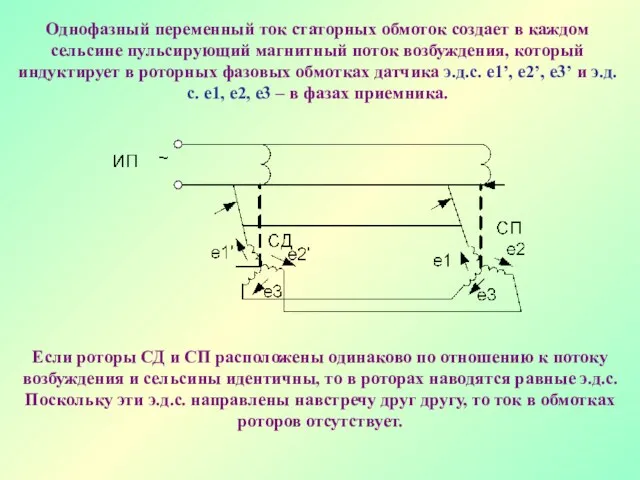
- 16. Однофазный переменный ток статорных обмоток создает в каждом сельсине пульсирующий магнитный поток возбуждения, который индуктирует в
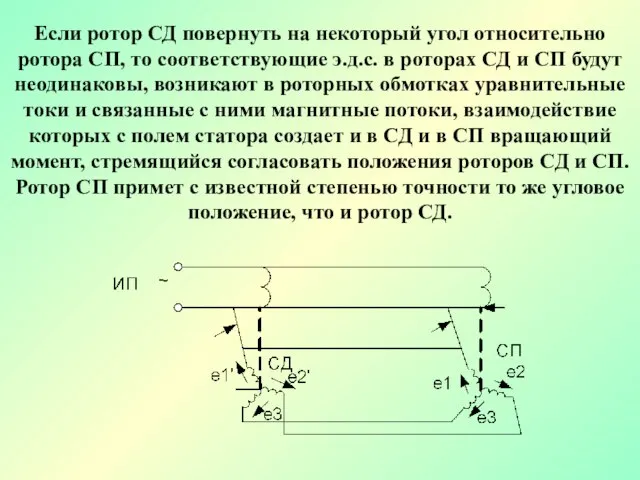
- 17. Если ротор СД повернуть на некоторый угол относительно ротора СП, то соответствующие э.д.с. в роторах СД
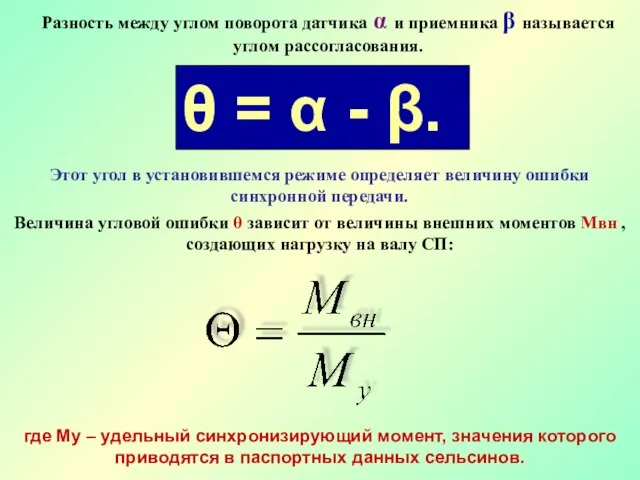
- 18. Разность между углом поворота датчика α и приемника β называется углом рассогласования. θ = α -
- 19. Отклонение условий эксплуатации сельсинов от номинальных (изменение трения в кольцах и подшипниках за счет нагара на
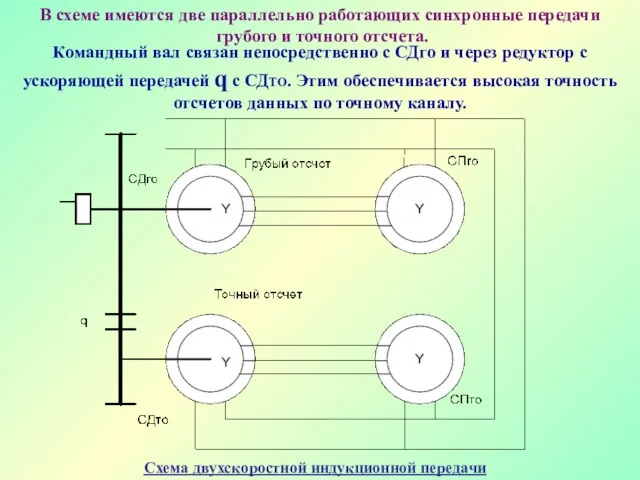
- 20. В схеме имеются две параллельно работающих синхронные передачи грубого и точного отсчета. Командный вал связан непосредственно
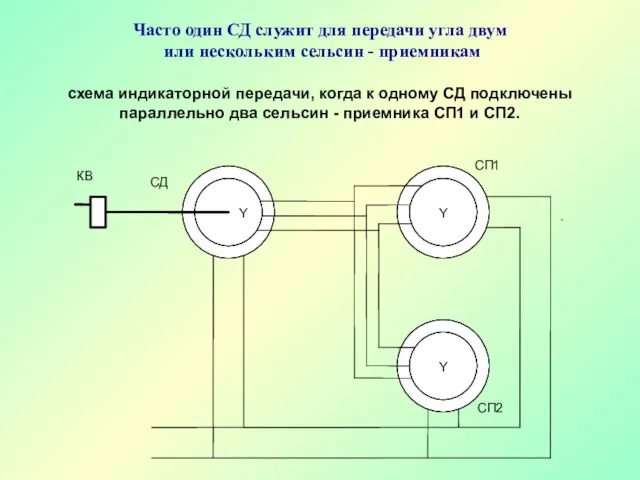
- 21. Часто один СД служит для передачи угла двум или нескольким сельсин - приемникам схема индикаторной передачи,
- 22. Промышленностью выпускаются специальные датчики серии ДИ, рассчитанные на работу различного числа принимающих сельсинов. При дистанционной индикаторной
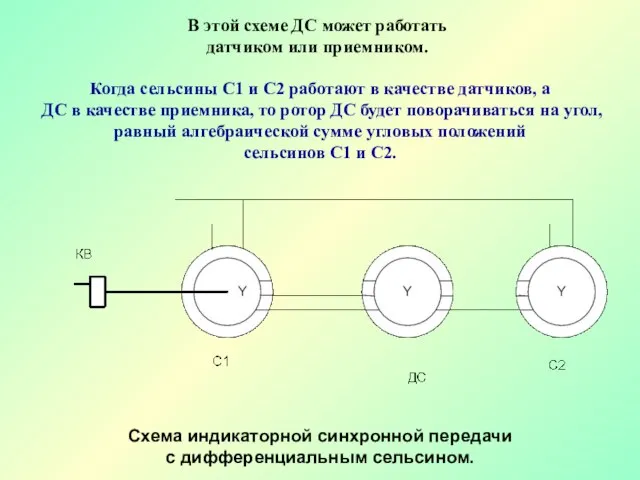
- 23. Схема индикаторной синхронной передачи с дифференциальным сельсином. В этой схеме ДС может работать датчиком или приемником.
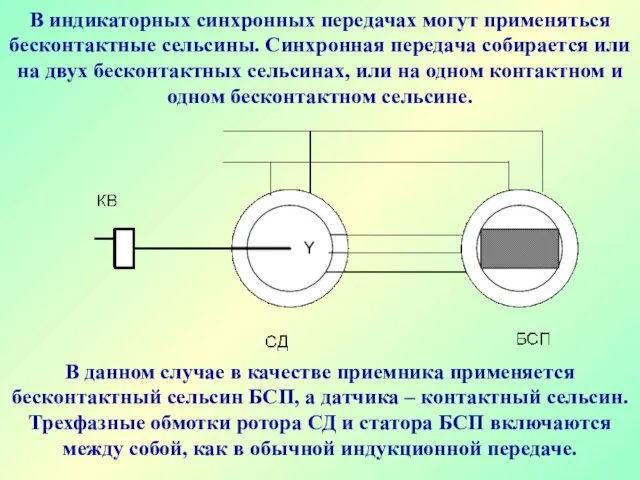
- 24. В индикаторных синхронных передачах могут применяться бесконтактные сельсины. Синхронная передача собирается или на двух бесконтактных сельсинах,
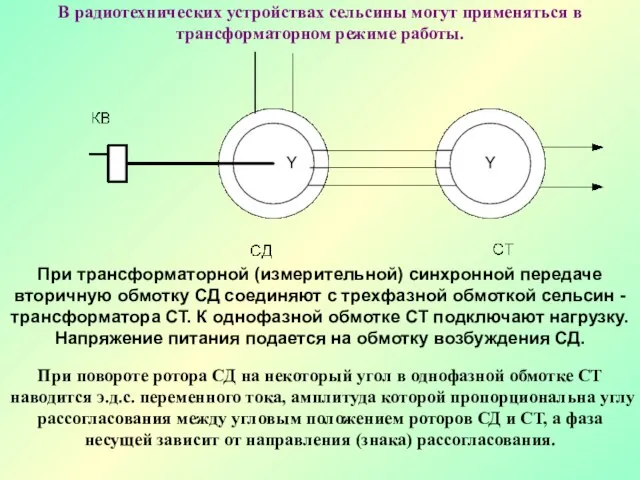
- 25. В радиотехнических устройствах сельсины могут применяться в трансформаторном режиме работы. При трансформаторной (измерительной) синхронной передаче вторичную
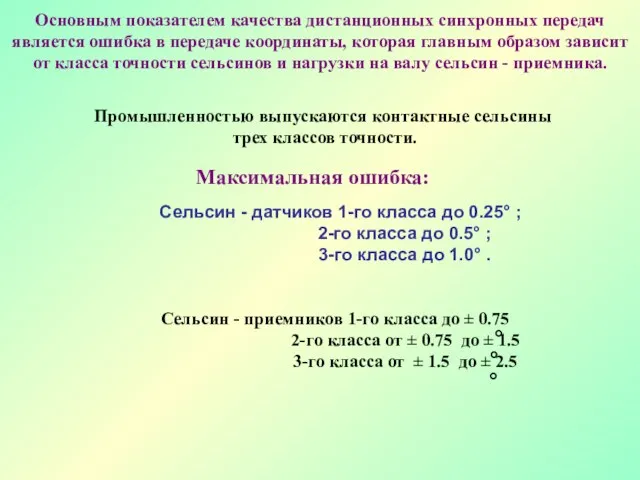
- 26. Основным показателем качества дистанционных синхронных передач является ошибка в передаче координаты, которая главным образом зависит от
- 27. Принцип работы вращающихся трансформаторов ВОПРОС №1 ВОПРОС №3
- 28. В качестве измерительного устройства в приводе 2Э2 ЗСУ-23-4 применяется синхронная передача, собранная на вращающихся трансформаторах. Вращающиеся
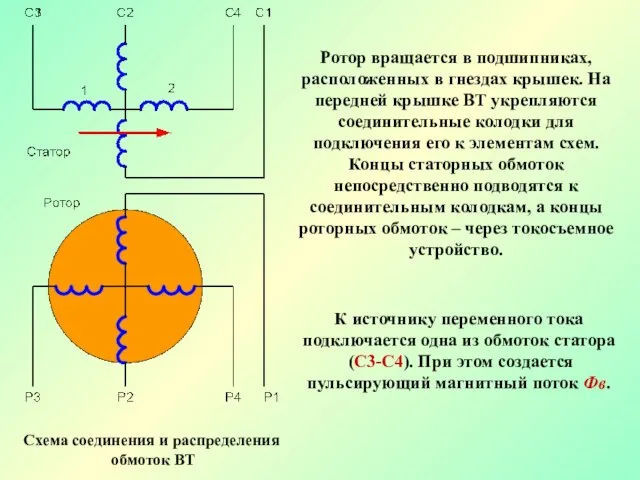
- 29. Ротор вращается в подшипниках, расположенных в гнездах крышек. На передней крышке ВТ укрепляются соединительные колодки для
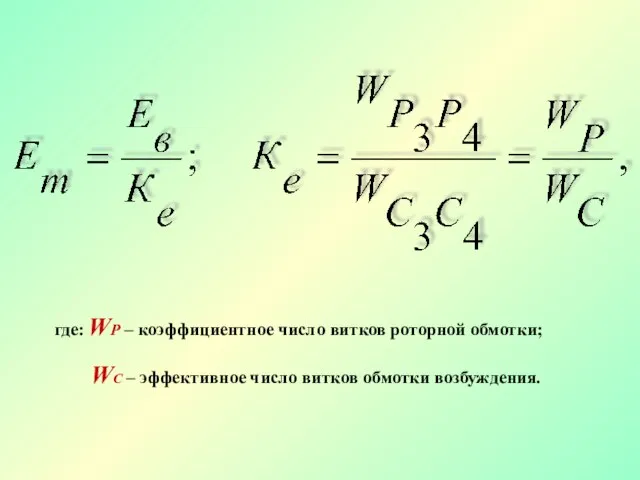
- 30. где: WР – коэффициентное число витков роторной обмотки; WС – эффективное число витков обмотки возбуждения.
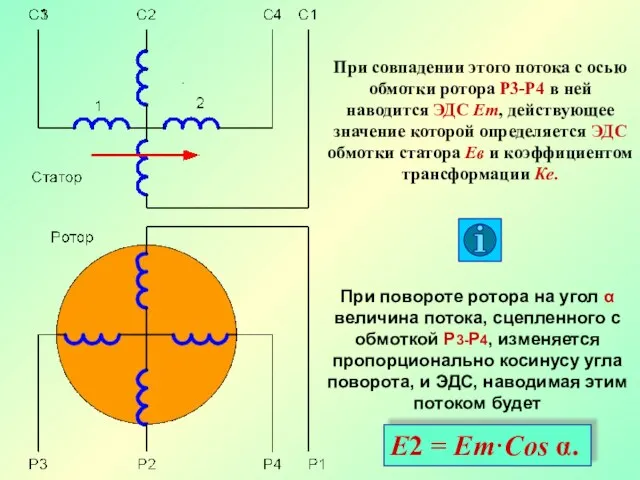
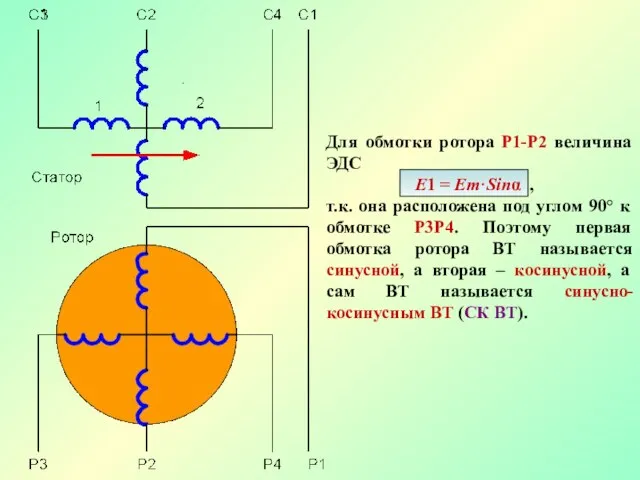
- 31. При совпадении этого потока с осью обмотки ротора Р3-Р4 в ней наводится ЭДС Ет, действующее значение
- 33. Синхронная передача в электрическом следящем приводе собрана на двух ВТ, один из которых называется ВТ -
- 34. Передаточные отношения от ИД до принимающего ВТ и от ИД до механизмов наведения артиллерийской части одинаковы,
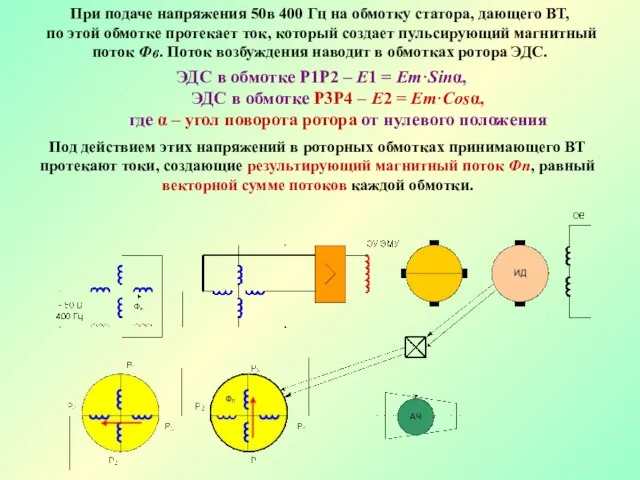
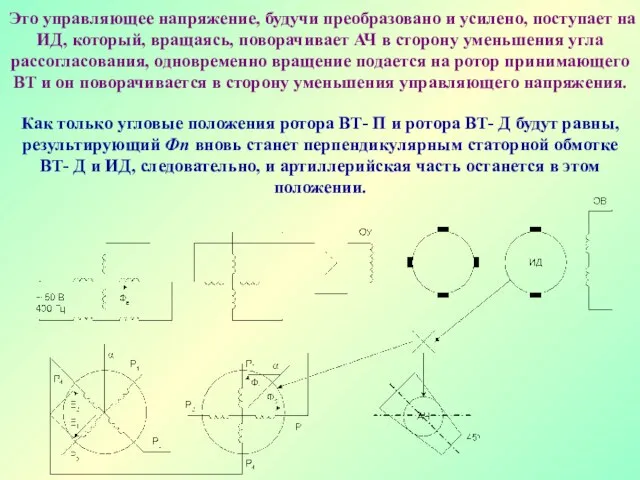
- 35. При подаче напряжения 50в 400 Гц на обмотку статора, дающего ВТ, по этой обмотке протекает ток,
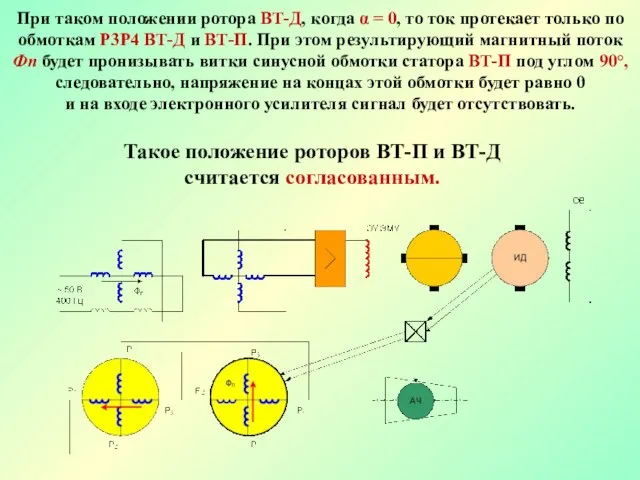
- 36. При таком положении ротора ВТ-Д, когда α = 0, то ток протекает только по обмоткам Р3Р4
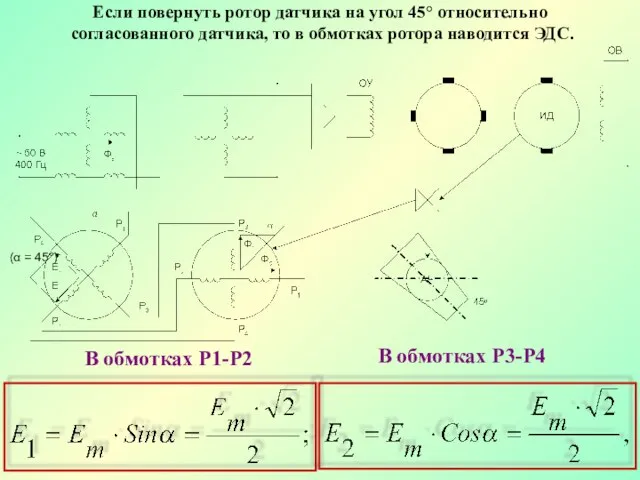
- 37. Если повернуть ротор датчика на угол 45° относительно согласованного датчика, то в обмотках ротора наводится ЭДС.
- 38. Таким образом, в роторных обмотках ВТ - П будут протекать токи, которые создадут потоки Ф1 и
- 39. Это управляющее напряжение, будучи преобразовано и усилено, поступает на ИД, который, вращаясь, поворачивает АЧ в сторону
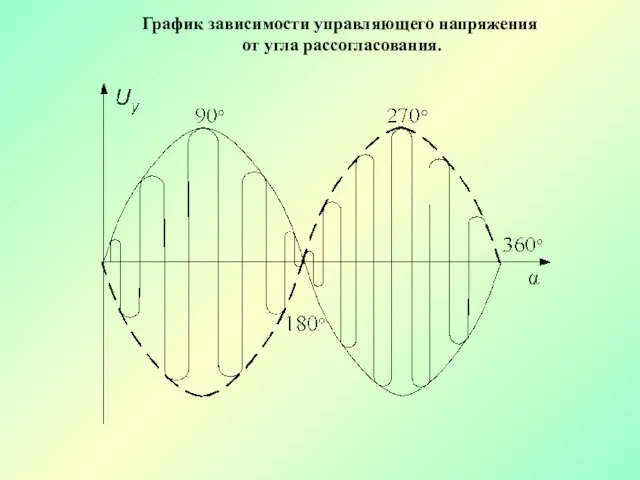
- 40. График зависимости управляющего напряжения от угла рассогласования.
- 42. Скачать презентацию
Слайд 3Учебные цели:
Изучить принцип работы автоматической следящей системы
Ознакомиться с принципом работы вращающихся
Учебные цели:
Изучить принцип работы автоматической следящей системы
Ознакомиться с принципом работы вращающихся
Слайд 41. Принцип работы автоматической следящей системы .
2. Индикаторные синхронные передачи.
3. Принцип
1. Принцип работы автоматической следящей системы .
2. Индикаторные синхронные передачи.
3. Принцип
Слайд 5Принцип работы автоматической следящей системы
ВОПРОС №1
ВОПРОС №1
Принцип работы автоматической следящей системы
ВОПРОС №1
ВОПРОС №1
Слайд 6Следящие системы - системы автоматического регулирования, в которых задающее воздействие изменяется по
Следящие системы - системы автоматического регулирования, в которых задающее воздействие изменяется по
Слайд 7Состав следящей системы
Задающий элемент (датчик).
2. Измерительный элемент.
3. Преобразующий элемент.
4. Усилительный
Состав следящей системы
Задающий элемент (датчик).
2. Измерительный элемент.
3. Преобразующий элемент.
4. Усилительный

Слайд 8Принцип работы следящих систем.
X
ΔU
Под действием задающего воздействия X, задающий элемент 1 вырабатывает
Принцип работы следящих систем.
X
ΔU
Под действием задающего воздействия X, задающий элемент 1 вырабатывает
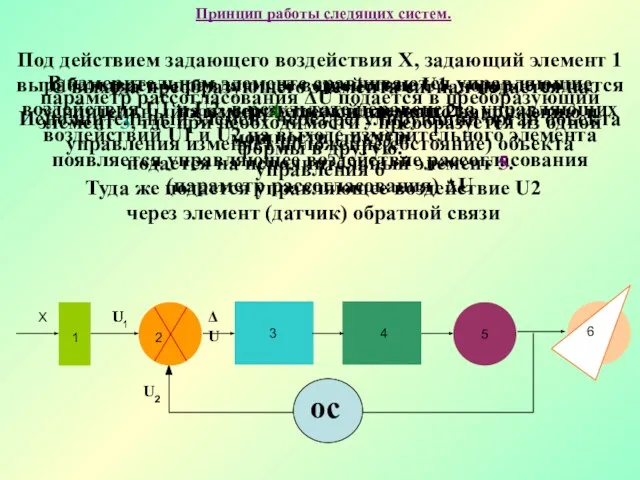
Слайд 9Одновременно с изменением положения(состояния) объекта управления будет изменяться управляемая величина , а
Одновременно с изменением положения(состояния) объекта управления будет изменяться управляемая величина , а
Слайд 10Индикаторные синхронные передачи
ВОПРОС №1
ВОПРОС №2
Индикаторные синхронные передачи
ВОПРОС №1
ВОПРОС №2
Слайд 11В радиолокационных станциях для передачи на большие расстояния данных дальности, азимута и
В радиолокационных станциях для передачи на большие расстояния данных дальности, азимута и
Слайд 12Состав синхронной передачи:
- датчик Д – устройство, преобразующее угол поворота командного вала
Состав синхронной передачи:
- датчик Д – устройство, преобразующее угол поворота командного вала
Слайд 13При передаче координат при помощи синхронной передачи угловое положение α командного вала
При передаче координат при помощи синхронной передачи угловое положение α командного вала
Слайд 14В автоматике радиолокационных систем наиболее часто применяют индукционные синхронные передачи.
В качестве
В автоматике радиолокационных систем наиболее часто применяют индукционные синхронные передачи.
В качестве
Слайд 15Схема состоит из сельсина-датчика СД, поворотом ротора которого задается передаваемый угол,
и
Схема состоит из сельсина-датчика СД, поворотом ротора которого задается передаваемый угол,
и
Слайд 16Однофазный переменный ток статорных обмоток создает в каждом сельсине пульсирующий магнитный поток
Однофазный переменный ток статорных обмоток создает в каждом сельсине пульсирующий магнитный поток
Слайд 17Если ротор СД повернуть на некоторый угол относительно ротора СП, то соответствующие
Если ротор СД повернуть на некоторый угол относительно ротора СП, то соответствующие
Слайд 18Разность между углом поворота датчика α и приемника β называется углом рассогласования.
Разность между углом поворота датчика α и приемника β называется углом рассогласования.
Слайд 19Отклонение условий эксплуатации сельсинов от номинальных (изменение трения в кольцах и подшипниках
Отклонение условий эксплуатации сельсинов от номинальных (изменение трения в кольцах и подшипниках
Слайд 20В схеме имеются две параллельно работающих синхронные передачи
грубого и точного отсчета.
В схеме имеются две параллельно работающих синхронные передачи
грубого и точного отсчета.
Слайд 21Часто один СД служит для передачи угла двум
или нескольким сельсин -
Часто один СД служит для передачи угла двум
или нескольким сельсин -
Слайд 22Промышленностью выпускаются специальные датчики серии ДИ, рассчитанные на работу различного числа принимающих
Промышленностью выпускаются специальные датчики серии ДИ, рассчитанные на работу различного числа принимающих
Слайд 23Схема индикаторной синхронной передачи
с дифференциальным сельсином.
В этой схеме ДС может
Схема индикаторной синхронной передачи
с дифференциальным сельсином.
В этой схеме ДС может
Слайд 24В индикаторных синхронных передачах могут применяться бесконтактные сельсины. Синхронная передача собирается или
В индикаторных синхронных передачах могут применяться бесконтактные сельсины. Синхронная передача собирается или
Слайд 25В радиотехнических устройствах сельсины могут применяться в трансформаторном режиме работы.
При трансформаторной (измерительной)
В радиотехнических устройствах сельсины могут применяться в трансформаторном режиме работы.
При трансформаторной (измерительной)
Слайд 26Основным показателем качества дистанционных синхронных передач является ошибка в передаче координаты, которая
Основным показателем качества дистанционных синхронных передач является ошибка в передаче координаты, которая
Слайд 27Принцип работы вращающихся трансформаторов
ВОПРОС №1
ВОПРОС №3
Принцип работы вращающихся трансформаторов
ВОПРОС №1
ВОПРОС №3
Слайд 28В качестве измерительного устройства в приводе 2Э2 ЗСУ-23-4
применяется синхронная передача,
собранная
В качестве измерительного устройства в приводе 2Э2 ЗСУ-23-4
применяется синхронная передача,
собранная
Слайд 29Ротор вращается в подшипниках, расположенных в гнездах крышек. На передней крышке ВТ
Ротор вращается в подшипниках, расположенных в гнездах крышек. На передней крышке ВТ
Слайд 30где: WР – коэффициентное число витков роторной обмотки;
WС – эффективное число
где: WР – коэффициентное число витков роторной обмотки;
WС – эффективное число
Слайд 31При совпадении этого потока с осью обмотки ротора Р3-Р4 в ней наводится
При совпадении этого потока с осью обмотки ротора Р3-Р4 в ней наводится
Слайд 33Синхронная передача в электрическом следящем приводе собрана на двух ВТ, один из
Синхронная передача в электрическом следящем приводе собрана на двух ВТ, один из
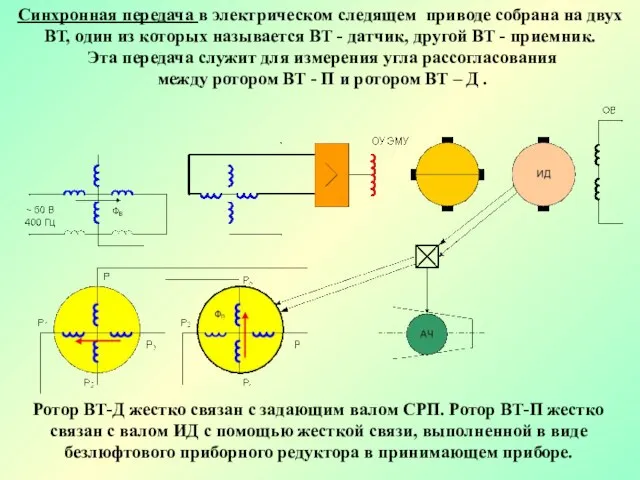
Слайд 34Передаточные отношения от ИД до принимающего ВТ и от ИД до механизмов
Передаточные отношения от ИД до принимающего ВТ и от ИД до механизмов
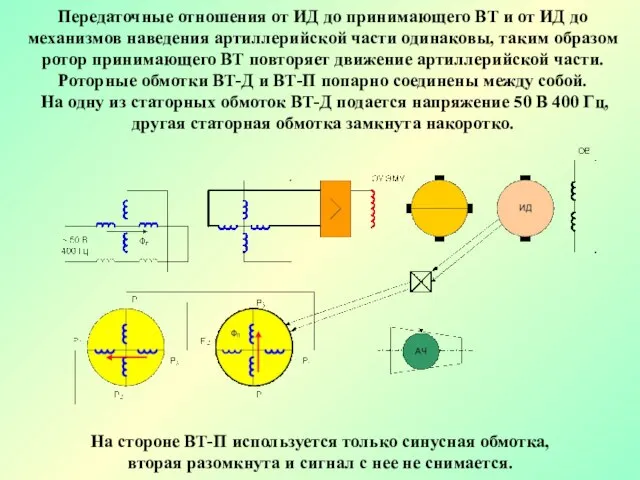
Слайд 35При подаче напряжения 50в 400 Гц на обмотку статора, дающего ВТ,
по
При подаче напряжения 50в 400 Гц на обмотку статора, дающего ВТ,
по
Слайд 36При таком положении ротора ВТ-Д, когда α = 0, то ток протекает
При таком положении ротора ВТ-Д, когда α = 0, то ток протекает
Слайд 37Если повернуть ротор датчика на угол 45° относительно
согласованного датчика, то в
Если повернуть ротор датчика на угол 45° относительно
согласованного датчика, то в
Слайд 38Таким образом, в роторных обмотках ВТ - П будут протекать токи,
которые
Таким образом, в роторных обмотках ВТ - П будут протекать токи,
которые
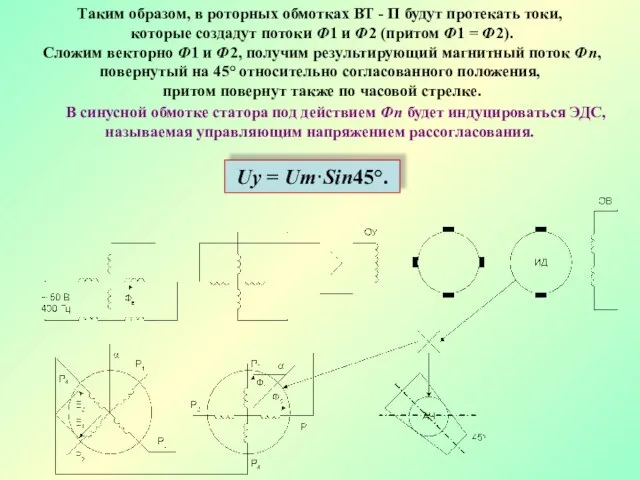
Слайд 39Это управляющее напряжение, будучи преобразовано и усилено, поступает на ИД, который, вращаясь,
Это управляющее напряжение, будучи преобразовано и усилено, поступает на ИД, который, вращаясь,
Слайд 40График зависимости управляющего напряжения
от угла рассогласования.
График зависимости управляющего напряжения
от угла рассогласования.
 Формирование жизненных проектов учащихся в условиях адаптивной сельской школы
Формирование жизненных проектов учащихся в условиях адаптивной сельской школы Сближение частиц материала при сушке
Сближение частиц материала при сушке Рыхлова Н.Н.
Рыхлова Н.Н. Исследовательская работа
Исследовательская работа Портрет Томаса Мора кисти Ганса Гольбейна Младшего
Портрет Томаса Мора кисти Ганса Гольбейна Младшего Леса умеренного пояса
Леса умеренного пояса Presentation Title
Presentation Title  Управление. Лекция 1
Управление. Лекция 1 Кристаллическая решетка
Кристаллическая решетка Йом-Кипур – День Искупления
Йом-Кипур – День Искупления Основные преимущества новой линейки OfficeServ Гибкость программирования станции Интегрированные VoIP возможности Организация беспров
Основные преимущества новой линейки OfficeServ Гибкость программирования станции Интегрированные VoIP возможности Организация беспров Презентация на тему Жизнь и творчество Горького
Презентация на тему Жизнь и творчество Горького Создание инновационно-образовательной модели внеурочной деятельностив гимназии в рамках апробации ФГОСНОО
Создание инновационно-образовательной модели внеурочной деятельностив гимназии в рамках апробации ФГОСНОО Презентация на тему История письменности
Презентация на тему История письменности  Презентация на тему Объёмы тел
Презентация на тему Объёмы тел Абсентеизм
Абсентеизм М.Горький «Детство»
М.Горький «Детство» Творчество. Первичная диагностика творческого проекта
Творчество. Первичная диагностика творческого проекта Белки - Строение и свойства
Белки - Строение и свойства 드라마와 함께 하는 한국어 수업 6강
드라마와 함께 하는 한국어 수업 6강 Большой театр 5 класс
Большой театр 5 класс Система инфракрасного отопления. Пленка электрическая на основе обогревателя ПЭН
Система инфракрасного отопления. Пленка электрическая на основе обогревателя ПЭН Open Source решения
Open Source решения Устный журнал
Устный журнал Когда появилась одежда?
Когда появилась одежда? Качество производственной деятельности объектов почтовой связи
Качество производственной деятельности объектов почтовой связи Особенности празднования Нового года в России
Особенности празднования Нового года в России Дробилки ударного действия. Машины для помола материалов. (Лекция №3)
Дробилки ударного действия. Машины для помола материалов. (Лекция №3)