- Силовые приводы наведения

Содержание
- 2. Занятие № 1. Общее устройство приводов.
- 3. Вопросы занятия: 1. Назначение, состав, размещение на мате-риальной части элементов приводов 2Э2. 2. Работа приводов по
- 4. Приводы наведения предназначены: - для автоматического дистанционного наведения по азимуту и углу возвышения пушки АЗП-23М при
- 5. Состав приводов наведения: - привод горизонтального (по азимуту) наведения (ГН); - привод вертикального (по углу возвышения)
- 6. Привод ВН имеет следующие устройства: - насос №1,5 с механизмом управления; - гидромотор №2,5; - принимающий
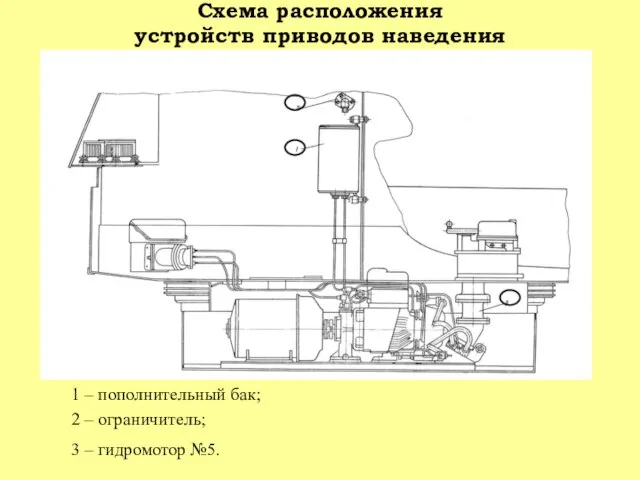
- 7. Схема расположения устройств приводов наведения 1 – пополнительный бак; 2 – ограничитель; 3 – гидромотор №5.
- 8. 1 – пополнительный бак; Схема расположения устройств приводов наведения Бак системы охлаждения АЗП
- 9. 4 – принимающий прибор ВН; 5 – насос №5 с блоком управления; 6 – принимающий прибор
- 10. 4 – принимающий прибор ВН; Схема расположения устройств приводов наведения Вытяжной вентилятор 11 – блок питания.
- 11. Схема расположения устройств приводов наведения 6 – принимающий прибор ГН;
- 12. Размещение на материальной части элементов приводов 2Э2. Пусковая аппаратура приводного электродвигателя ДСО-20 размещается в пульте командира
- 13. Принимающий прибор ВН установлен на приставке редуктора вертикального наведения, связан безлюфтовой передачей с гидромотором №2,5. Приставка
- 14. Принимающий прибор ГН установлен на крышке редуктора горизонтального наведения, связан кинематической передачей с гидромотором №5. Принимающий
- 15. Гидромотор №5 крепится вертикально снизу к редуктору горизонтального наведения и кинематически связан с погоном вращающейся части
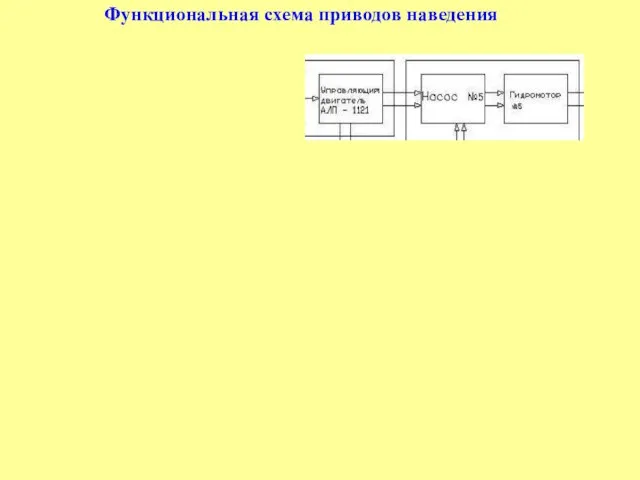
- 16. 2. Работа приводов по функциональной схеме. Функционально каждый привод наведения состоит из следующих основных устройств: -
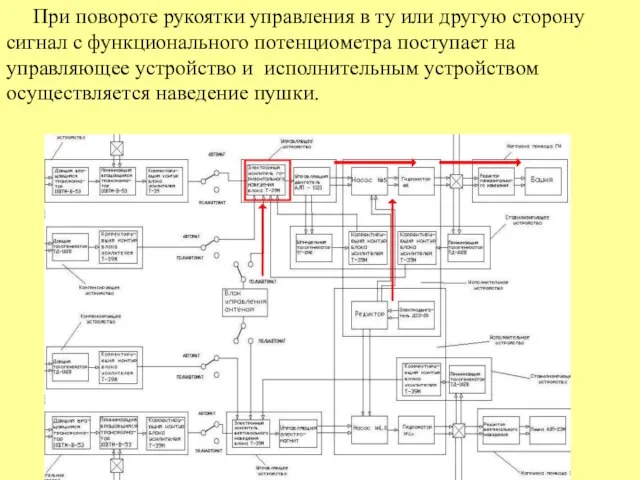
- 17. Функциональная схема приводов наведения
- 18. Автоматический режим. В автоматическом режиме работы приводы наведения управляются по данным ОПК. Если между дающим и
- 19. В электронных усилителях оно складывается с напряжениями стабилизирующего и компенсирующего устройств, преобразуется, усиливается и поступает на
- 20. Башня и качающаяся часть пушки будут вращаться в сторону уменьшения угла рассогласования до тех пор, пока
- 21. Полуавтоматический режим. В полуавтоматическом режиме сигналы, поступающие от ОПК, отключаются. Управление приводами наведения происходит по сигналам,
- 22. Фаза и величина управляющего сигнала, снимаемого с потенциометра, зависят от направления и угла поворота его движка.
- 23. При повороте рукоятки управления в ту или другую сторону сигнал с функционального потенциометра поступает на управляющее
- 24. Спасибо за внимание!!!
- 25. Функциональная схема приводов наведения
- 26. Функциональная схема приводов наведения
- 27. Функциональная схема приводов наведения
- 28. Функциональная схема приводов наведения
- 30. Скачать презентацию

Слайд 3Вопросы занятия:
1. Назначение, состав, размещение на мате-риальной части элементов приводов 2Э2.
2. Работа
Вопросы занятия:
1. Назначение, состав, размещение на мате-риальной части элементов приводов 2Э2.
2. Работа

Слайд 4Приводы наведения предназначены:
- для автоматического дистанционного наведения по азимуту и углу
Приводы наведения предназначены:
- для автоматического дистанционного наведения по азимуту и углу
Слайд 5Состав приводов наведения:
- привод горизонтального (по азимуту) наведения (ГН);
- привод вертикального (по
Состав приводов наведения:
- привод горизонтального (по азимуту) наведения (ГН);
- привод вертикального (по
Слайд 6Привод ВН имеет следующие устройства:
- насос №1,5 с механизмом управления;
- гидромотор №2,5;
-
Привод ВН имеет следующие устройства:
- насос №1,5 с механизмом управления;
- гидромотор №2,5;
-
Слайд 7Схема расположения
устройств приводов наведения
1 – пополнительный бак;
2 – ограничитель;
3
Схема расположения
устройств приводов наведения
1 – пополнительный бак;
2 – ограничитель;
3
Слайд 81 – пополнительный бак;
Схема расположения
устройств приводов наведения
Бак системы охлаждения АЗП
1 – пополнительный бак;
Схема расположения
устройств приводов наведения
Бак системы охлаждения АЗП

Слайд 94 – принимающий прибор ВН;
5 – насос №5 с блоком управления;
4 – принимающий прибор ВН;
5 – насос №5 с блоком управления;

Слайд 104 – принимающий прибор ВН;
Схема расположения
устройств приводов наведения
Вытяжной вентилятор
11 –
4 – принимающий прибор ВН;
Схема расположения
устройств приводов наведения
Вытяжной вентилятор
11 –

Слайд 11Схема расположения
устройств приводов наведения
6 – принимающий
прибор ГН;
Схема расположения
устройств приводов наведения
6 – принимающий
прибор ГН;

Слайд 12 Размещение на материальной части элементов приводов 2Э2.
Пусковая аппаратура приводного электродвигателя ДСО-20
Размещение на материальной части элементов приводов 2Э2.
Пусковая аппаратура приводного электродвигателя ДСО-20
Слайд 13Принимающий прибор ВН установлен на приставке редуктора вертикального наведения, связан безлюфтовой передачей
Принимающий прибор ВН установлен на приставке редуктора вертикального наведения, связан безлюфтовой передачей

Слайд 14Принимающий прибор ГН установлен на крышке редуктора горизонтального наведения, связан кинематической передачей
Принимающий прибор ГН установлен на крышке редуктора горизонтального наведения, связан кинематической передачей

Слайд 15Гидромотор №5 крепится вертикально снизу к редуктору горизонтального наведения и кинематически связан
Гидромотор №5 крепится вертикально снизу к редуктору горизонтального наведения и кинематически связан
Слайд 162. Работа приводов по функциональной схеме.
Функционально каждый привод наведения состоит из
2. Работа приводов по функциональной схеме.
Функционально каждый привод наведения состоит из

Слайд 17Функциональная схема приводов наведения
Функциональная схема приводов наведения

Слайд 18Автоматический режим.
В автоматическом режиме работы приводы наведения управляются по данным ОПК.
Автоматический режим.
В автоматическом режиме работы приводы наведения управляются по данным ОПК.

Слайд 19В электронных усилителях оно складывается с напряжениями стабилизирующего и компенсирующего устройств, преобразуется,
В электронных усилителях оно складывается с напряжениями стабилизирующего и компенсирующего устройств, преобразуется,

Слайд 20 Башня и качающаяся часть пушки будут вращаться в сторону уменьшения угла
Башня и качающаяся часть пушки будут вращаться в сторону уменьшения угла
Слайд 21Полуавтоматический режим.
В полуавтоматическом режиме сигналы, поступающие от ОПК, отключаются.
Управление
Полуавтоматический режим.
В полуавтоматическом режиме сигналы, поступающие от ОПК, отключаются.
Управление

Слайд 22 Фаза и величина управляющего сигнала, снимаемого с потенциометра, зависят от направления
Фаза и величина управляющего сигнала, снимаемого с потенциометра, зависят от направления

Слайд 23 При повороте рукоятки управления в ту или другую сторону сигнал с
При повороте рукоятки управления в ту или другую сторону сигнал с
Слайд 24Спасибо за внимание!!!
Спасибо за внимание!!!

Слайд 25Функциональная схема приводов наведения
Функциональная схема приводов наведения

Слайд 26Функциональная схема приводов наведения
Функциональная схема приводов наведения
Слайд 27Функциональная схема приводов наведения
Функциональная схема приводов наведения

Слайд 28Функциональная схема приводов наведения
Функциональная схема приводов наведения

 Ерёмина Наталья Петровна учитель русского языка и литературы первой квалификационной категории
Ерёмина Наталья Петровна учитель русского языка и литературы первой квалификационной категории Особенности чувашской национальной кухни
Особенности чувашской национальной кухни Выдающиеся писатели России
Выдающиеся писатели России Презентация на тему Квадратное уравнение и его корни (8 класс)
Презентация на тему Квадратное уравнение и его корни (8 класс) Паевой инвестиционный фонд (ПИФ) – новый для России способ вложения денег, который с каждым годом становится всё более популярным.
Паевой инвестиционный фонд (ПИФ) – новый для России способ вложения денег, который с каждым годом становится всё более популярным.  ИНТЕГРИРОВАННЫЙ УРОК С КОМПЬЮТЕРНОЙ ПОДДЕРЖКОЙпо русскому языку и окружающему миру по теме: «Правописание падежных окончаний им
ИНТЕГРИРОВАННЫЙ УРОК С КОМПЬЮТЕРНОЙ ПОДДЕРЖКОЙпо русскому языку и окружающему миру по теме: «Правописание падежных окончаний им Мы идем в театр
Мы идем в театр Управління освіти і науки Вінницької обласної державної адміністрації Управління освіти Вінницької міської ради Фізико-математи
Управління освіти і науки Вінницької обласної державної адміністрації Управління освіти Вінницької міської ради Фізико-математи Орнамент
Орнамент Методика обучения квадратным уравнениям
Методика обучения квадратным уравнениям Животная клетка
Животная клетка Конкурс чтецов 1-4 классов в Выльгортской Школе №1
Конкурс чтецов 1-4 классов в Выльгортской Школе №1 Реклама на спинках кресел в кинотеатрах
Реклама на спинках кресел в кинотеатрах Презентация на тему Религиозные конфликты
Презентация на тему Религиозные конфликты Танцы народов мира
Танцы народов мира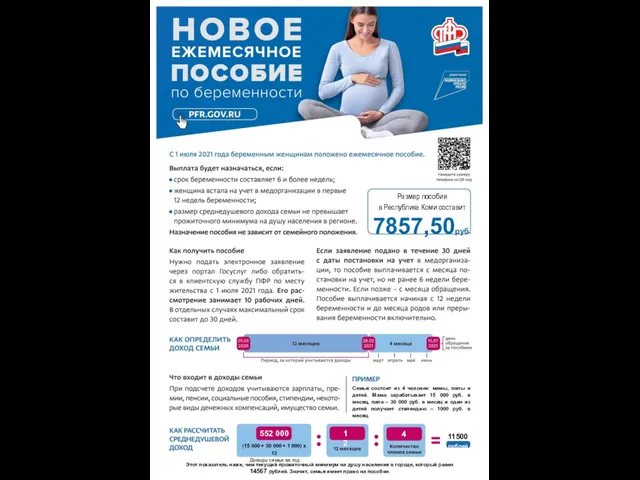 Размер пособия в Республике Коми
Размер пособия в Республике Коми Связь потребностей и видов деятельности
Связь потребностей и видов деятельности Sortir
Sortir Разрез
Разрез English is like a global in modern world
English is like a global in modern world Kit vivienda Unifamiliar
Kit vivienda Unifamiliar Место духовной музыки в мировой художественной культуре
Место духовной музыки в мировой художественной культуре Водопоровод
Водопоровод Значение и специфика театрального искусства
Значение и специфика театрального искусства Общие сведения
Общие сведения Pronomi personali e pronomi/aggettivi possessivi
Pronomi personali e pronomi/aggettivi possessivi Национальная безопасность
Национальная безопасность Создание программы Федерального Сервиса
Создание программы Федерального Сервиса