- Основы управления сложными организационно-техническими системами

Содержание
- 2. КИБЕРНЕТИКА Н.Винер (1948). Наука об управлении и связи в животном и машине А.И.Берг (1959) - Представляет
- 3. ОСНОВНЫЕ НАУЧНЫЕ РЕЗУЛЬТАТЫ КЛАССИЧЕСКОЙ КИБЕРНЕТИКИ Доказано, что важнейшим атрибутом любой системы (биологической, технической, социальной и т.п.)
- 4. НЕОБХОДИМОСТЬ ДАЛЬНЕЙШЕЙ ЭВОЛЮЦИИ КИБЕРНЕТИКИ Особенности современных объектов управления: повышенная сложность и размерность, избыточность, многофункциональность, распределенность, унификация,
- 5. ЭВОЛЮЦИЯ КИБЕРНЕТИКИ Second cybernetics – кибернетика второго порядка – КВП М.Марума (1963). КВП рассматривает контуры положительной
- 6. ЭВОЛЮЦИЯ КИБЕРНЕТИКИ (продолжение) Редько В.Г. и др. (с 1993 г.). Эволюционная кибернетика – изучает кибернетические свойства
- 7. Неокибернетика междисциплинарная наука, ориентированная на разработку методологии постановки и решения проблем анализа и синтеза интеллектуальных процессов
- 8. ИСХОДНОЕ ПОНИМАНИЕ ИНФОРМАТИКИ «ИНФОРМАТИКА – научная дисциплина, изучающая структуру и общие свойства научной информации, а также
- 9. ОПРЕДЕЛЕНИЯ ИНФОРМАТИКИ Наука о преобразовании информации, которая базируется на вычислительной технике. Предметом информатики является вычислительная технология
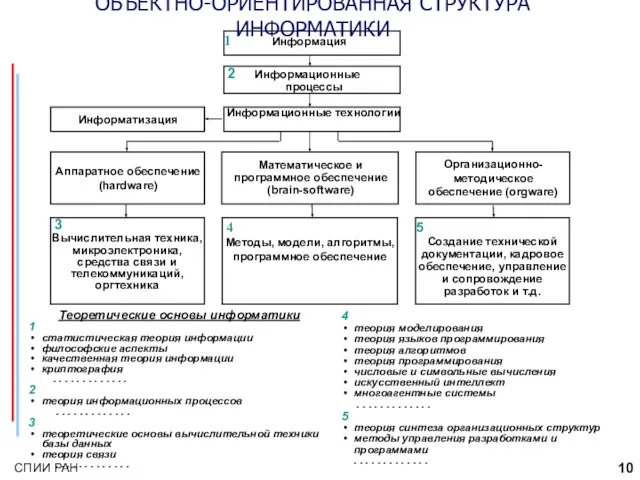
- 10. 1 Информация 2 Информационные процессы Информационные технологии Информатизация Аппаратное обеспечение (hardware) Математическое и программное обеспечение (brain-software)
- 11. ИНФОРМАТИКА – наука о методах и средствах сбора, хранения, передачи, представления, обработки и защиты информации
- 12. РАЗВИВАЮЩИЕСЯ РАЗДЕЛЫ ИНФОРМАТИКИ: извлечение знаний из данных; машинное обучение; многоагентные системы компьютерное зрение; речевая информатика; стеганография
- 13. ОСНОВНЫЕ ПРИЧИНЫ «БЛИЗОСТИ» ИНФОРМАТИКИ И КИБЕРНЕТИКИ Информатика развивалась в недрах кибернетики, практически на единой технической базе
- 14. «Информатика – кибернетика на современном этапе» (Бирюков Б.В., 1989) «… совокупность научных направлений, называемых теперь информатикой,
- 15. ОСНОВНЫЕ ПОНЯТИЯ КИБЕРНЕТИКИ И ИНФОРМАТИКИ
- 16. ИНТЕГРАЦИЯ ИНФОРМАТИКИ И КИБЕРНЕТИКИ адаптивные компьютерные системы; проактивные компьютерные системы; адаптивные предприятия; киберпространство; киберпреступление и т.д.
- 17. ИНФОРМАЦИОННОЕ УПРАВЛЕНИЕ Под информационным управлением понимается процесс выработки и реализации управленческих решений в ситуации, когда управляющее
- 18. АДАПТИВНЫЕ И ПРОАКТИВНЫЕ КОМПЬЮТЕРНЫЕ СИСТЕМЫ (proactive computing) Адаптивные и проактивные компьютерные (proactive computing) системы призваны для
- 19. ПРОГРАММНАЯ КИБЕРНЕТИКА Первый семинар по программной кибернетики – 2004 г., Гонконг, 28-я Международная конференция по ПО
- 20. ИНТЕГРАЦИЯ ИНФОРМАТИКИ И КИБЕРНЕТИКИ Предварительный отчет – рекомендация для рамочной программы РП-7 «Исследование по системам управления
- 21. Определение статической и динамической моделей С т а т и ч е с к а я
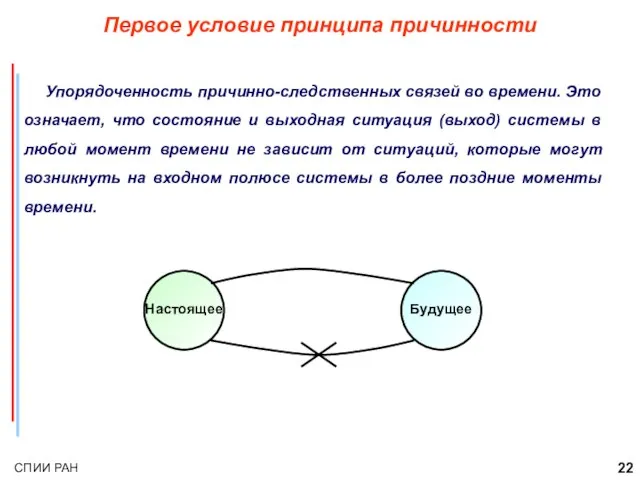
- 22. Первое условие принципа причинности Упорядоченность причинно-следственных связей во времени. Это означает, что состояние и выходная ситуация
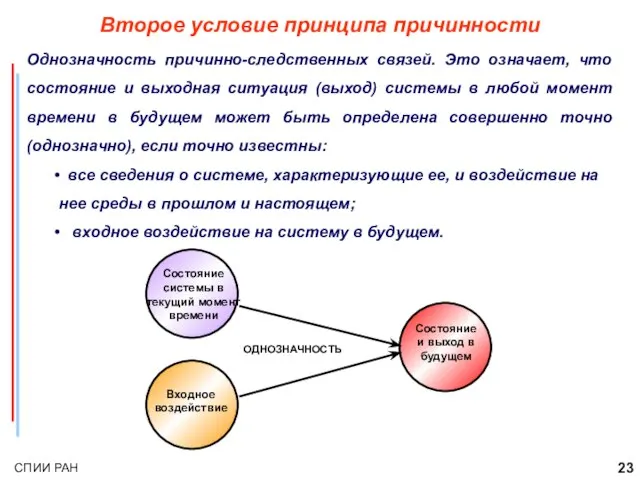
- 23. Второе условие принципа причинности Однозначность причинно-следственных связей. Это означает, что состояние и выходная ситуация (выход) системы
- 24. Динамическая система Первая часть этого принципа эквивалента утверждению о том, что будущее системы не влияет на
- 25. Кинематическая модель К и н е м а т и ч е с к о й
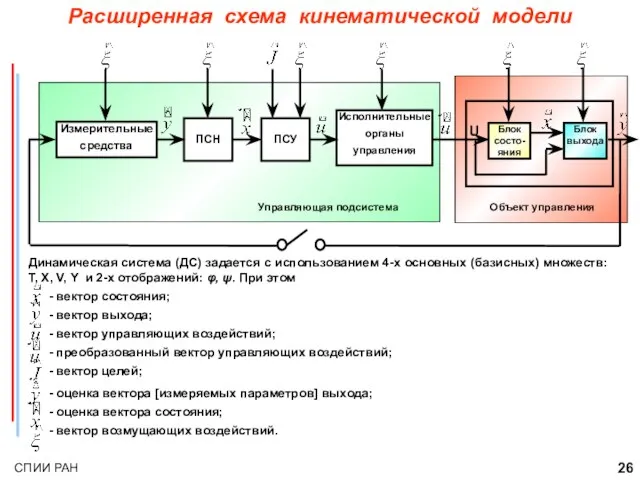
- 26. Расширенная схема кинематической модели Динамическая система (ДС) задается с использованием 4-х основных (базисных) множеств: T, X,
- 27. Динамическая система Каждое из множеств X, V, Y может быть в свою очередь конечным, счетным, континуальным,
- 28. Основные классы задач теории управления ДС (ТУ ДС) (детерминированный вариант задания исходных данных)
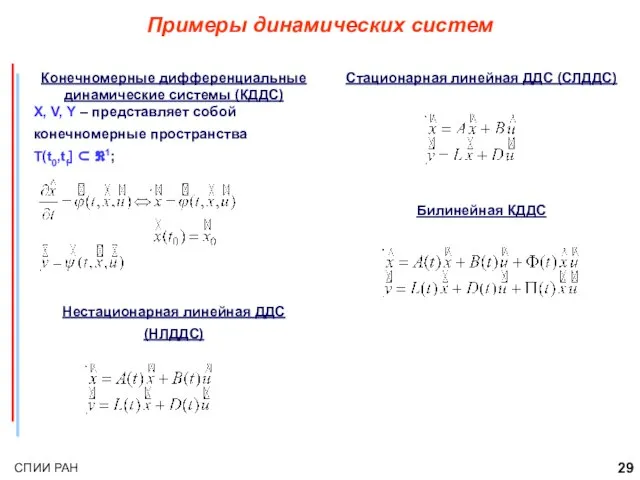
- 29. Примеры динамических систем Конечномерные дифференциальные динамические системы (КДДС) X, V, Y – представляет собой конечномерные пространства
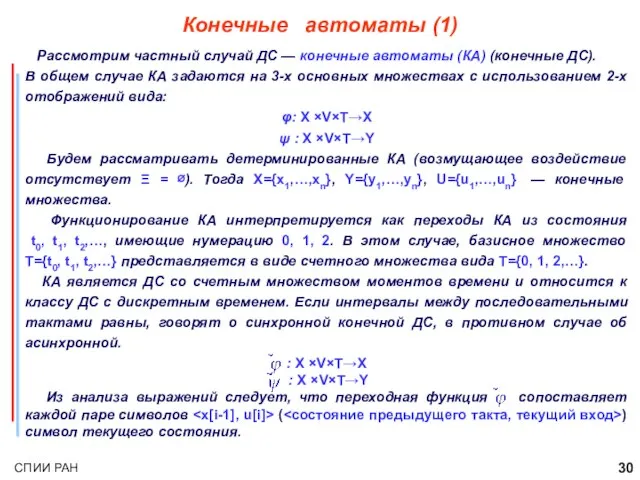
- 30. Конечные автоматы (1) Рассмотрим частный случай ДС — конечные автоматы (КА) (конечные ДС). В общем случае
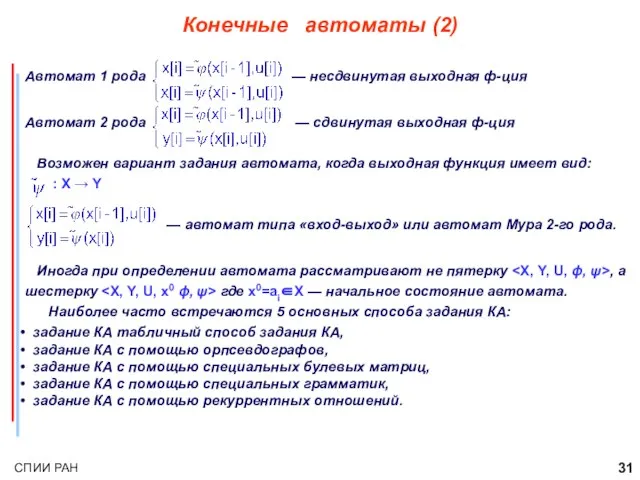
- 31. Конечные автоматы (2) Автомат 1 рода — несдвинутая выходная ф-ция Автомат 2 рода — сдвинутая выходная
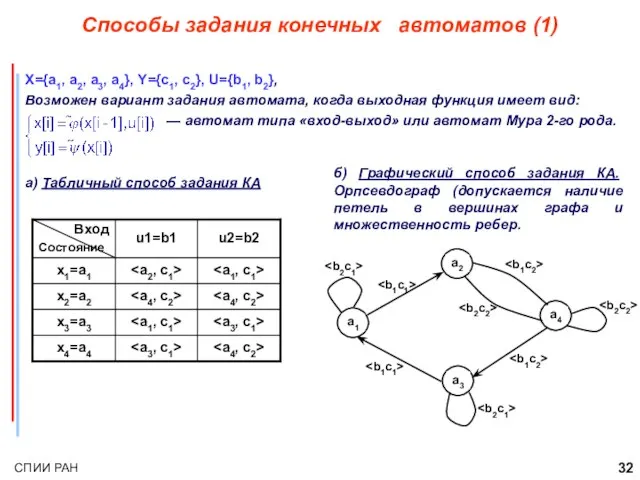
- 32. Способы задания конечных автоматов (1) X={a1, a2, a3, a4}, Y={c1, c2}, U={b1, b2}, Возможен вариант задания
- 33. Способы задания конечных автоматов (2) в) Матричный вариант задания КА (используются специальные булевые матрицы) Число строк
- 34. Способы задания конечных автоматов (3) Пример. Дано — начальное состояние КА, — сценарий задания входного воздействие
- 35. 1. Примеры сложных технических систем Топологическая структура орбитальной системы навигационных космических аппаратов
- 36. 1. Примеры сложных технических систем ЦА целевая аппаратура НКА; ОА обеспечивающая аппаратура НКА; РБДЗ распределенная база
- 37. 1. Примеры сложных технических систем Структура технологии автоматизированного управления космическими средствами.
- 38. 1. Примеры сложных технических систем (CTС)
- 39. 1. Примеры сложных технических систем
- 40. 1. Примеры сложных технических систем Рис. 1.1 Рис. 1.2 Рис. 1.3 Рис. 1.4 Рис. 1.5 Рис.
- 41. 2. Структурная динамика СТС : основные понятия, определения, концепции Рис..2.1. Диаграммы структурной динамики СТС. Рис.2.2. Графики
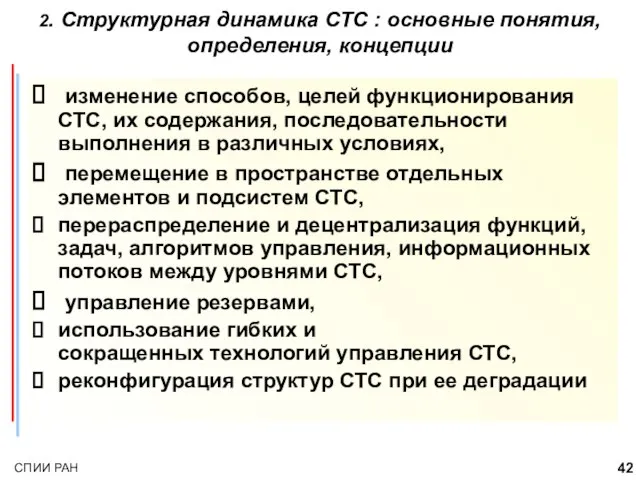
- 42. изменение способов, целей функционирования СТС, их содержания, последовательности выполнения в различных условиях, перемещение в пространстве отдельных
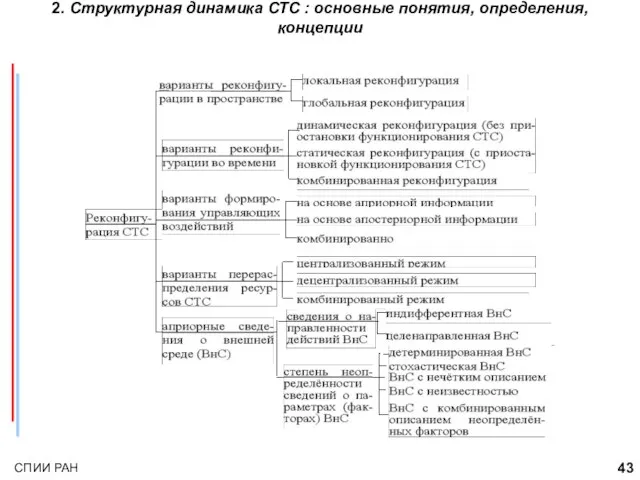
- 43. 2. Структурная динамика СТС : основные понятия, определения, концепции
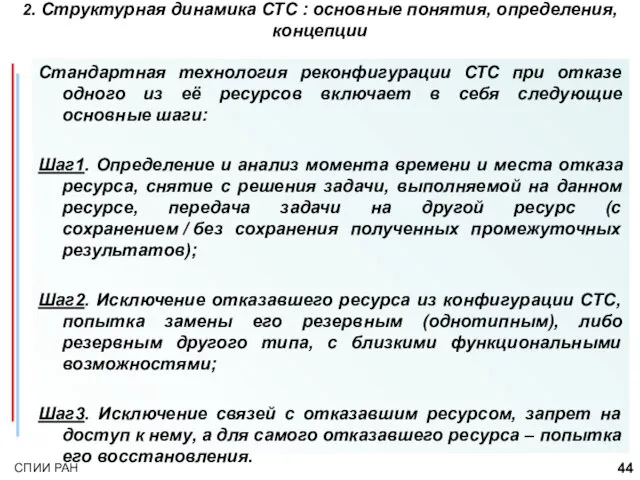
- 44. 2. Структурная динамика СТС : основные понятия, определения, концепции Стандартная технология реконфигурации СТС при отказе одного
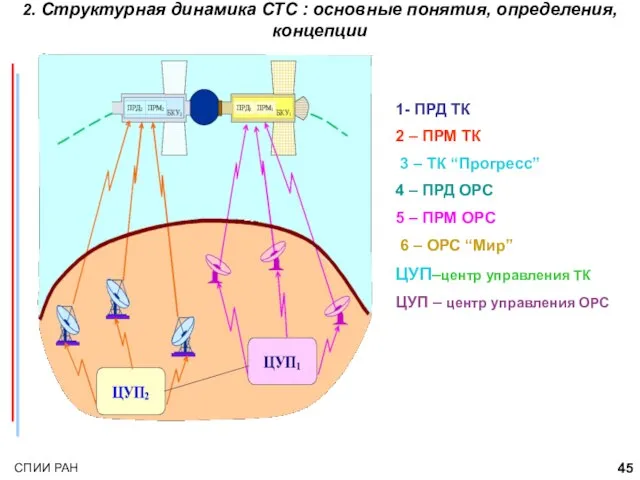
- 45. 2. Структурная динамика СТС : основные понятия, определения, концепции 1- ПРД TК 2 – ПРМ TК
- 46. В современных условиях исследование проблем управления структурной динамикой осуществляется в рамках следующих направлений: синтез технической структуры
- 47. Главная трудность решения задач управления структурной динамикой состоит в следующем: Определение оптимальных программ управления основными элементами
- 48. проблемы большой размерности и нелинейности моделей, описывающих структуру и варианты функционирования элементов и подсистем СТС; проблемы
- 49. Проблема управления структурной динамикой СТС предполагают решение четырех основных классов задач: задачи комплексного моделирования процессов управления
- 50. Рис.3.1. Место теории управления структурной динамикой СТС в системе междисциплинарных исследований 3. Современное состояние исследований проблем
- 51. 3. Современное состояние исследований проблем управления структурной динамикой СТС Основополагающие научные работы Системный анализ Поспелов Г.С.
- 52. 3. Современное состояние исследований проблем управления структурной динамикой СТС Основополагающие научные работы Теория систем Месарович, Такахара,
- 53. 3. Современное состояние исследований проблем управления структурной динамикой СТС Основополагающие научные работы Теория управления Athaus, Falb,
- 54. 4. Методологические основы управления структурной динамикой СТС
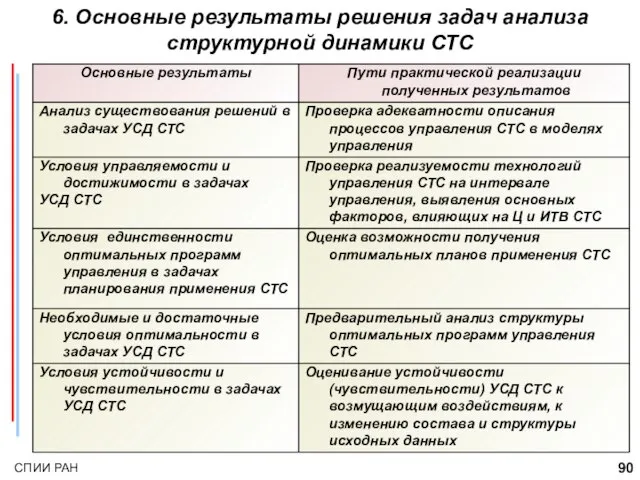
- 55. 4. Методологические основы управления структурной динамикой СТС Методологические основы теории УСД СТС включают в себя: Концепции:
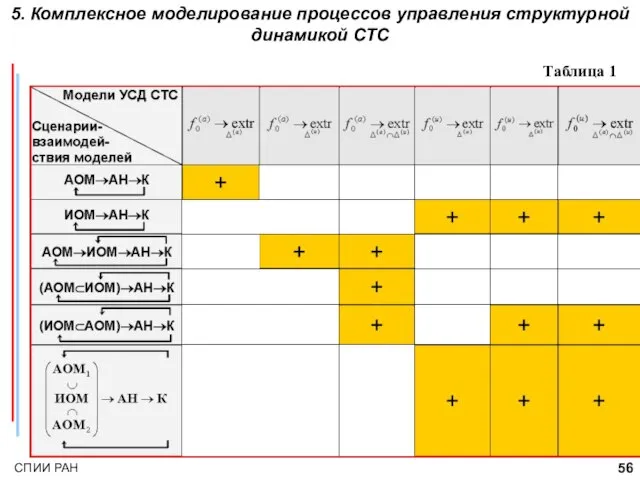
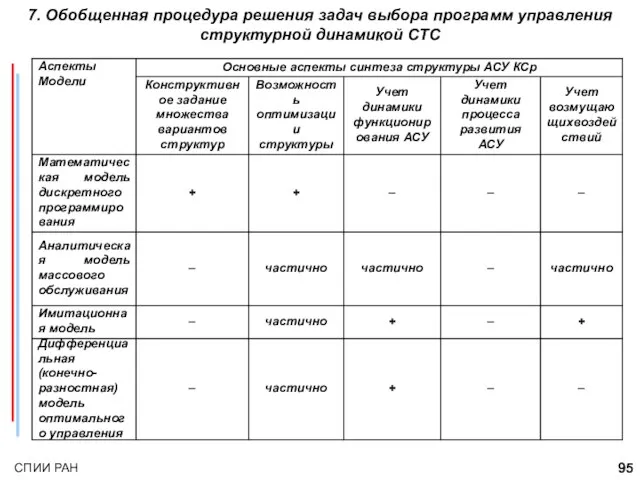
- 56. Таблица 1 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 57. 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 58. 5. Комплексное моделирование процессов управления структурной динамикой СТС
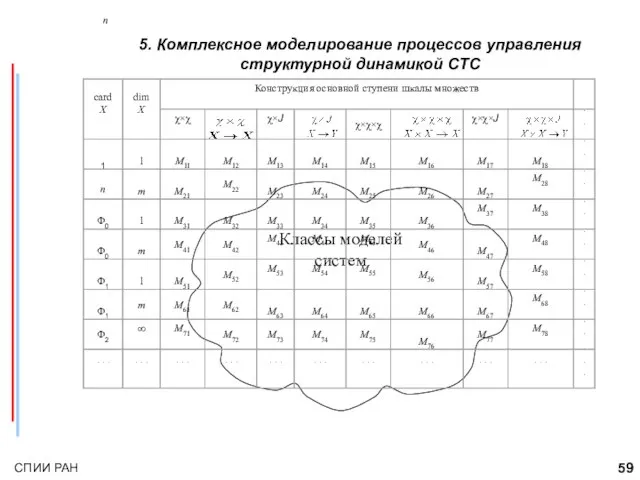
- 59. 5. Комплексное моделирование процессов управления структурной динамикой СТС n
- 60. 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 61. 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 62. Рис. 5.1. Обобщенная структурная схема активного подвижного объекта 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 63. Рис.5.2. Фрагмент диаграммы переходов из обобщенных состояний АПО первого типа 5. Комплексное моделирование процессов управления структурной
- 64. 5. Комплексное моделирование процессов управления структурной динамикой СТС Рис.5.3. Возможные варианты интерпретации АПО первого типа Космические
- 65. Пусть перед системой АПО стоит двойственная задача: 1) создание в заданных областях физического пространства таких условий
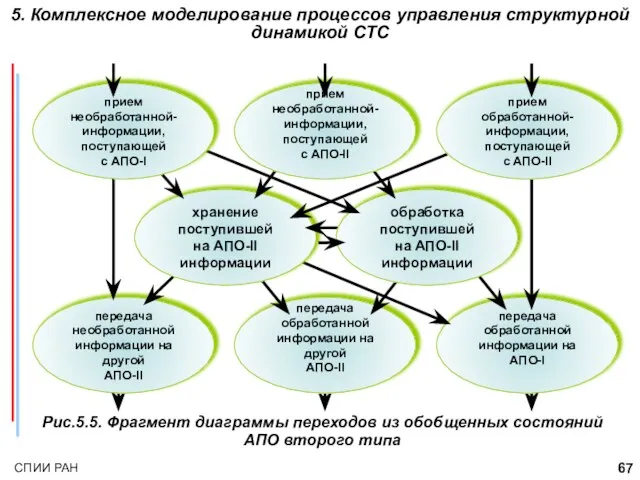
- 66. 5. Комплексное моделирование процессов управления структурной динамикой СТС Рис.5.4. Обобщенная структурная схема системы обслуживания (АПО второго
- 67. Рис.5.5. Фрагмент диаграммы переходов из обобщенных состояний АПО второго типа 5. Комплексное моделирование процессов управления структурной
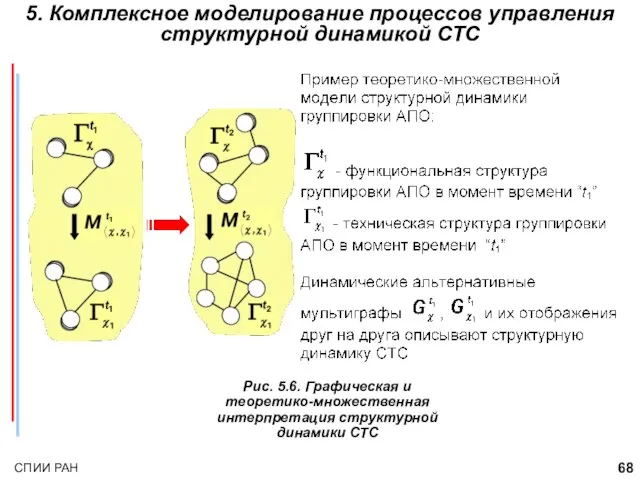
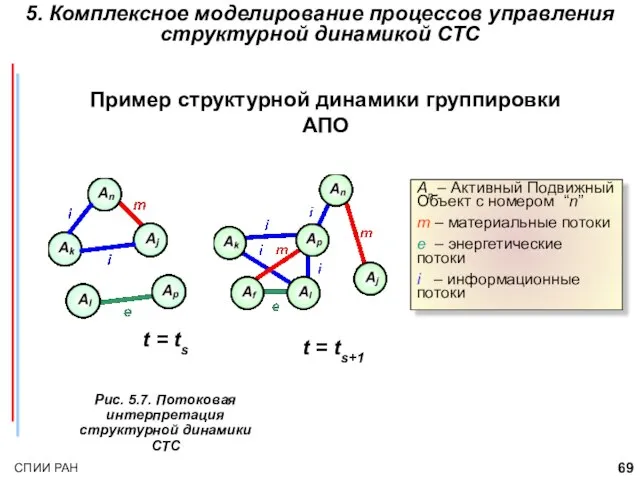
- 68. 5. Комплексное моделирование процессов управления структурной динамикой СТС Рис. 5.6. Графическая и теоретико-множественная интерпретация структурной динамики
- 69. Пример структурной динамики группировки АПО An – Активный Подвижный Объект с номером “n” m – материальные
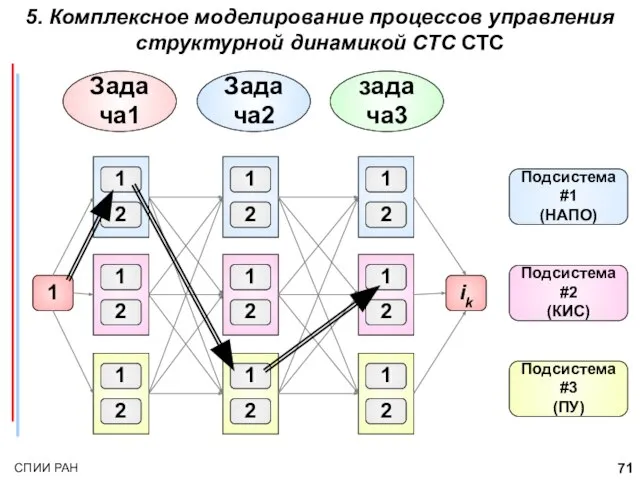
- 70. 5. Комплексное моделирование процессов управления структурной динамикой СТС Рис. 5.8. Геометрическая интерпретация задачи распределения функций управления
- 71. 5. Комплексное моделирование процессов управления структурной динамикой СТС СТС
- 72. 5. Комплексное моделирование процессов управления структурной динамикой СТС Динамическая интерпретация выполнения комплексов операции 1. Традиционный подход
- 73. 5. Комплексное моделирование процессов управления структурной динамикой СТС СТС ; Зимин И.Н., Иванилов Ю.П., Лернер А.Я.
- 74. 5. Комплексное моделирование процессов управления структурной динамикой СТС ; Предлагаемый подход
- 75. Мg – динамические модели управления движением СТС; Мk – динамические модели управления каналами СТС; Мо –
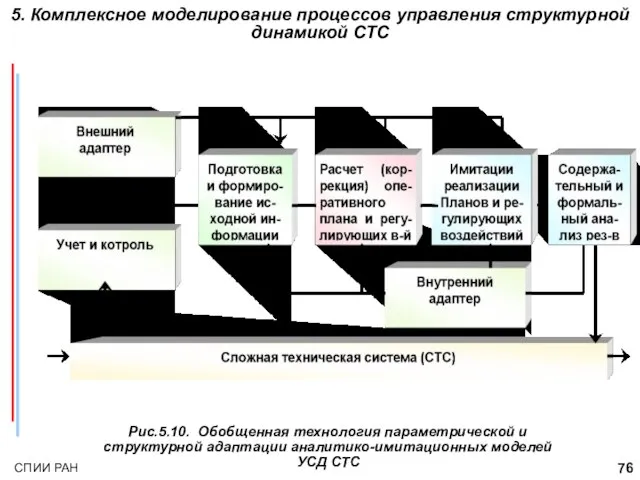
- 76. Рис.5.10. Обобщенная технология параметрической и структурной адаптации аналитико-имитационных моделей УСД СТС 5. Комплексное моделирование процессов управления
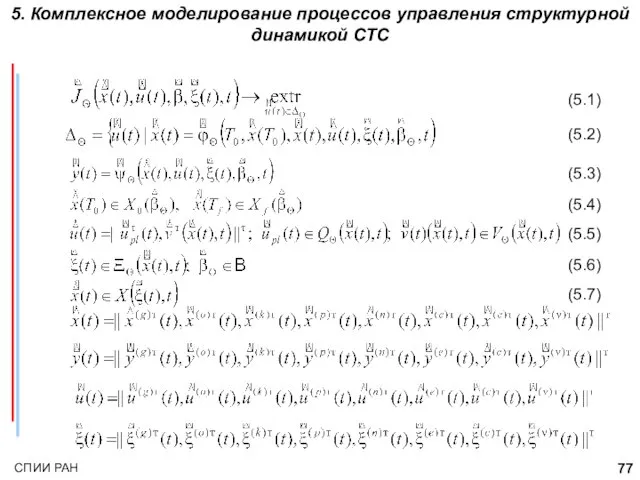
- 77. 5. Комплексное моделирование процессов управления структурной динамикой СТС (5.1) (5.2) (5.3) (5.4) (5.5) (5.6) (5.7)
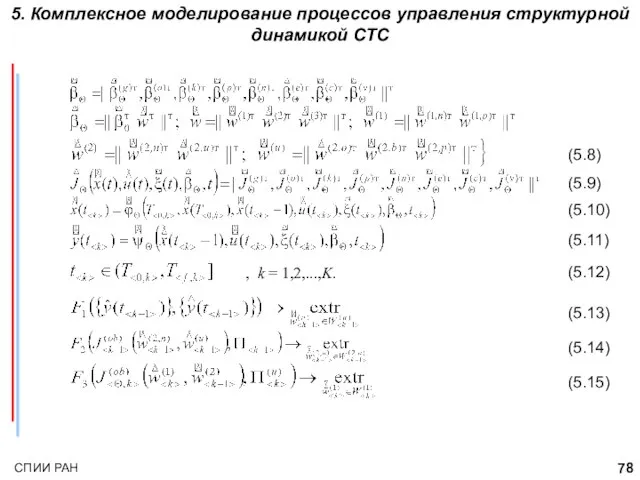
- 78. 5. Комплексное моделирование процессов управления структурной динамикой СТС (5.8) , k = 1,2,...,K. (5.9) (5.10) (5.11)
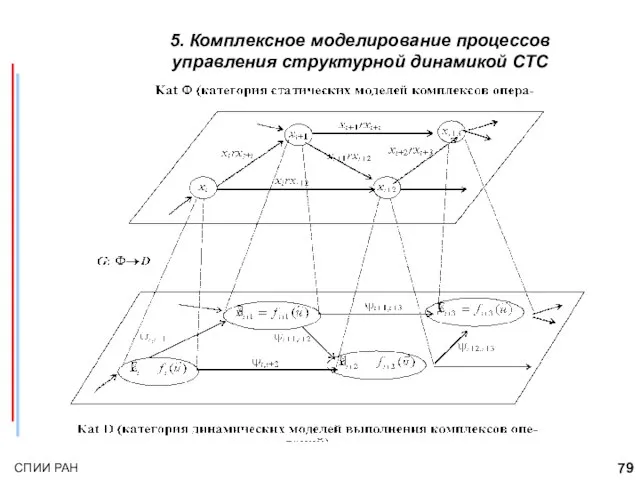
- 79. 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 80. 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 81. 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 82. 5. Комплексное моделирование процессов управления структурной динамикой СТС
- 83. 6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и информационно-технологических возможностей СТС)
- 84. 6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и информационно-технологических возможностей СТС)
- 85. 6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и информационно-технологических возможностей СТС)
- 86. 6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и информационно-технологических возможностей СТС)
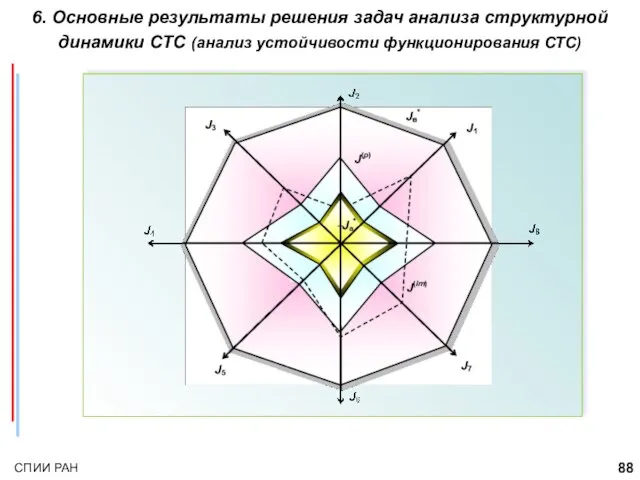
- 87. 6. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования СТС)
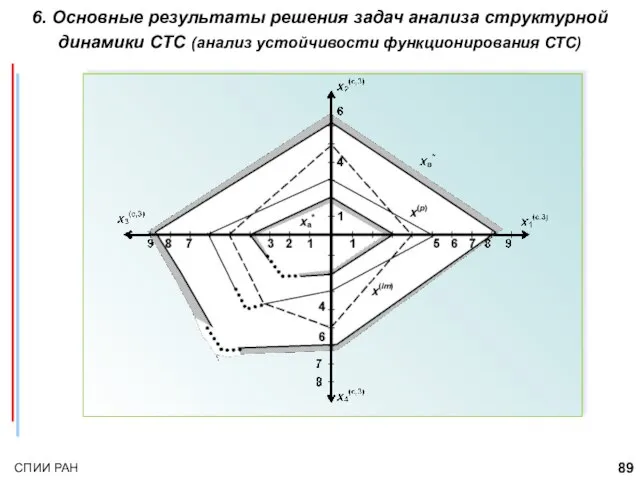
- 88. 6. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования СТС)
- 89. 6. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования СТС)
- 90. 6. Основные результаты решения задач анализа структурной динамики СТС
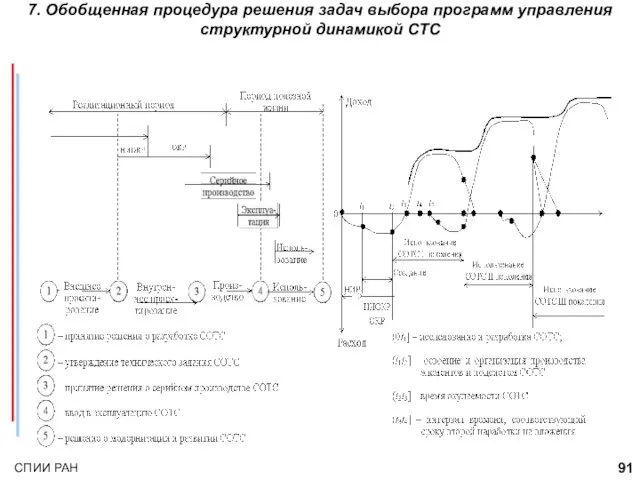
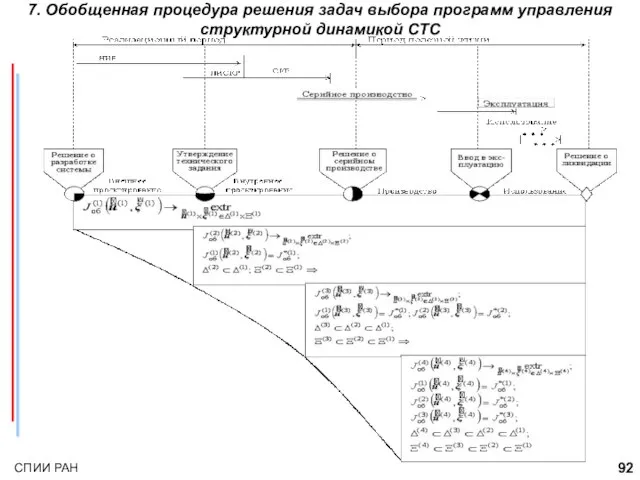
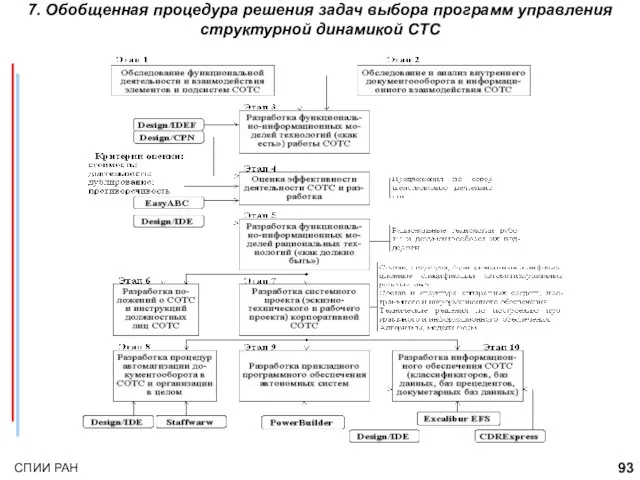
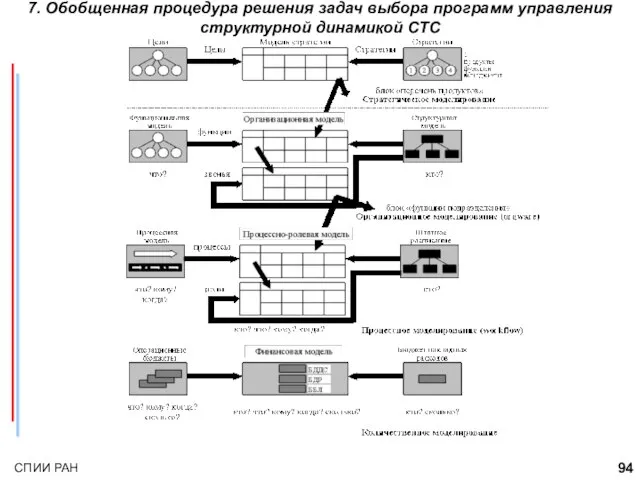
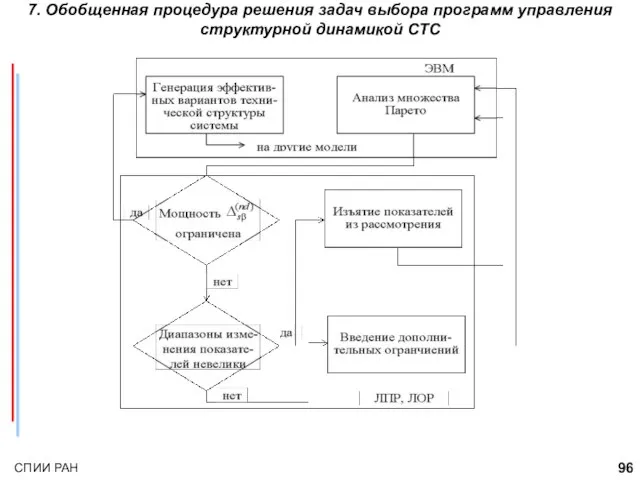
- 91. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
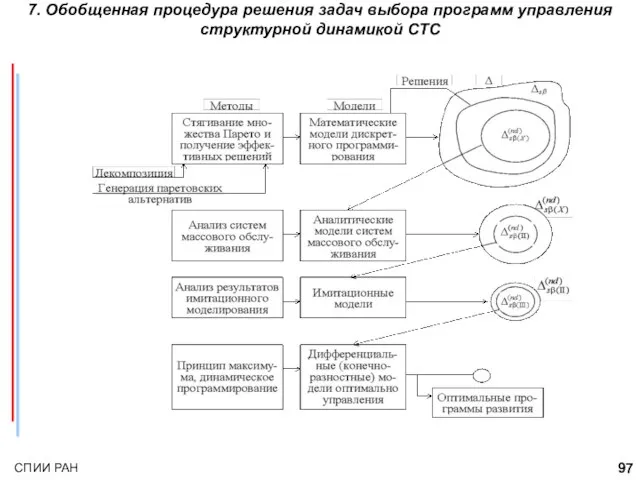
- 92. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
- 93. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
- 94. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
- 95. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
- 96. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
- 97. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
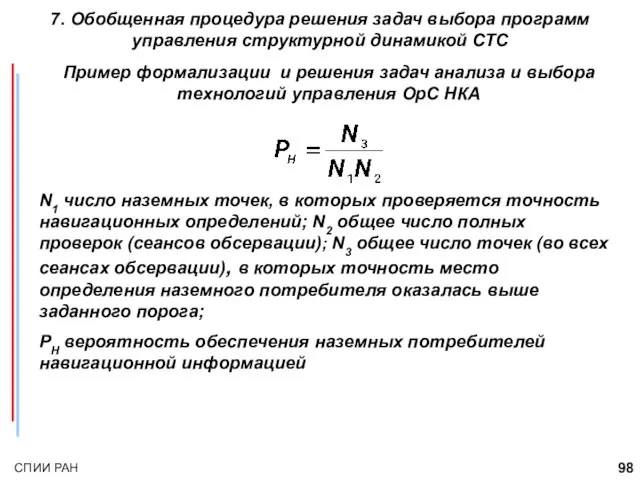
- 98. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС Пример формализации и решения задач
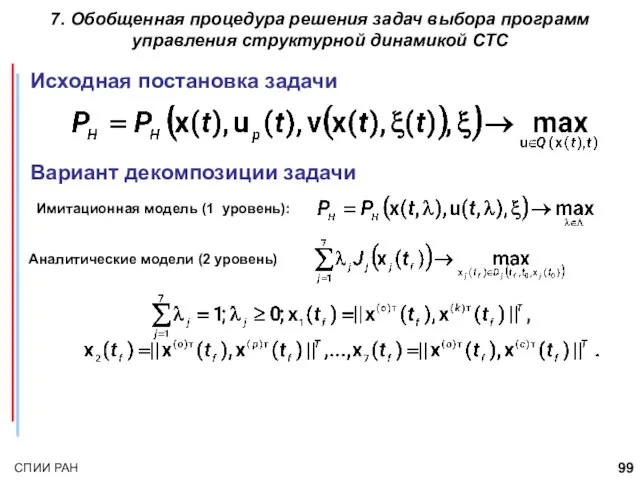
- 99. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС Исходная постановка задачи Вариант декомпозиции
- 100. Обобщенная процедура решения задач УСД СТС должна включать следующие основные фазы: На первой фазе должно осуществляться
- 101. Шаг 1. Формирование, анализ и интерпретация исходных данных, используемых при генерировании (синтезе) многоструктурных макросостояний СТС, построение
- 102. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
- 103. 7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
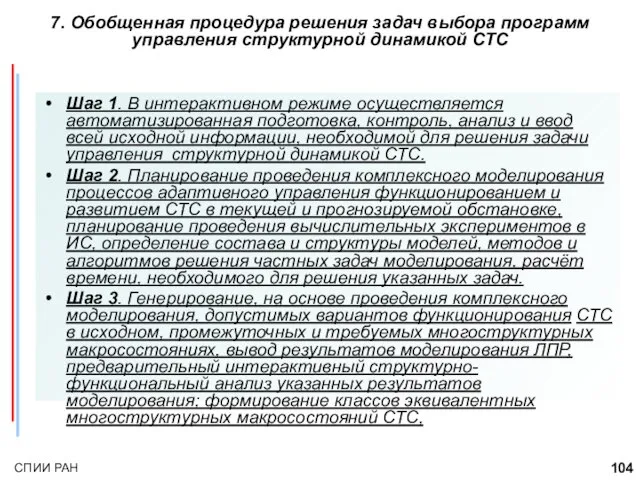
- 104. Шаг 1. В интерактивном режиме осуществляется автоматизированная подготовка, контроль, анализ и ввод всей исходной информации, необходимой
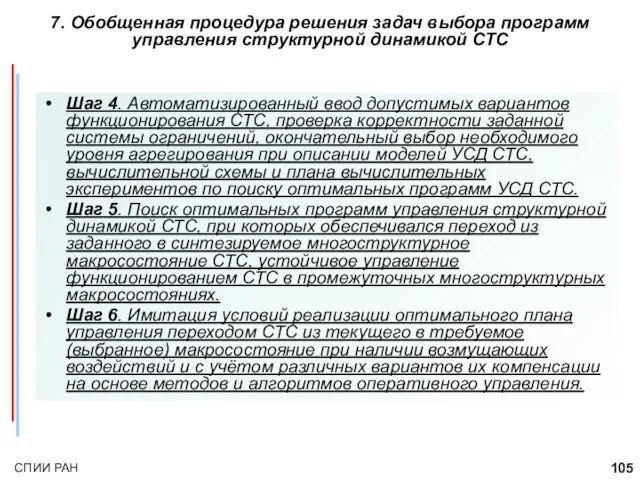
- 105. Шаг 4. Автоматизированный ввод допустимых вариантов функционирования СТС, проверка корректности заданной системы ограничений, окончательный выбор необходимого
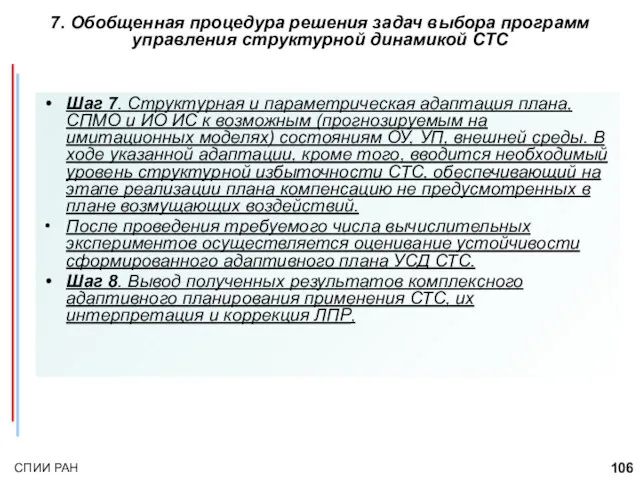
- 106. Шаг 7. Структурная и параметрическая адаптация плана, СПМО и ИО ИС к возможным (прогнозируемым на имитационных
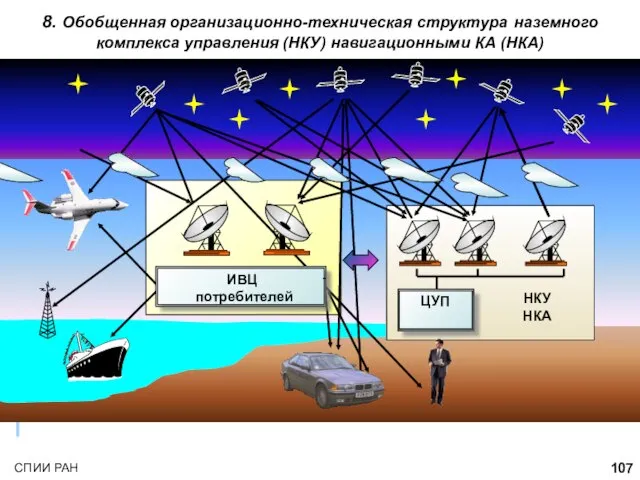
- 107. ИВЦ потребителей - НКУ НКА ЦУП 8. Обобщенная организационно-техническая структура наземного комплекса управления (НКУ) навигационными КА
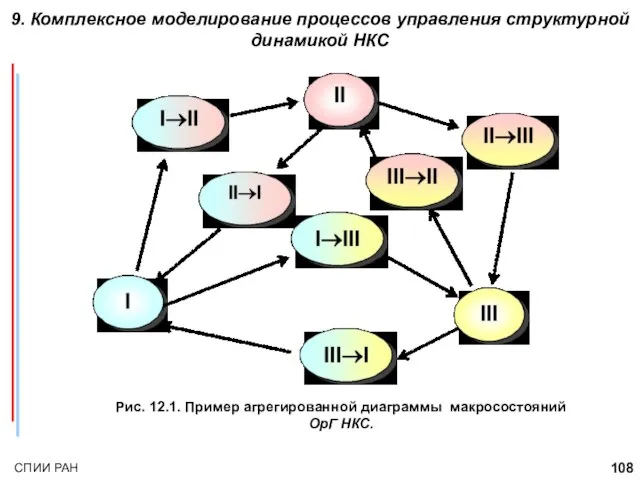
- 108. 9. Комплексное моделирование процессов управления структурной динамикой НКС Рис. 12.1. Пример агрегированной диаграммы макросостояний ОрГ НКС.
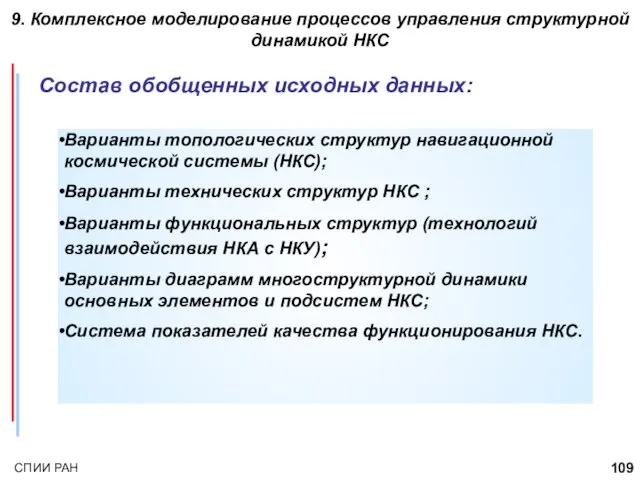
- 109. 9. Комплексное моделирование процессов управления структурной динамикой НКС Состав обобщенных исходных данных: Варианты топологических структур навигационной
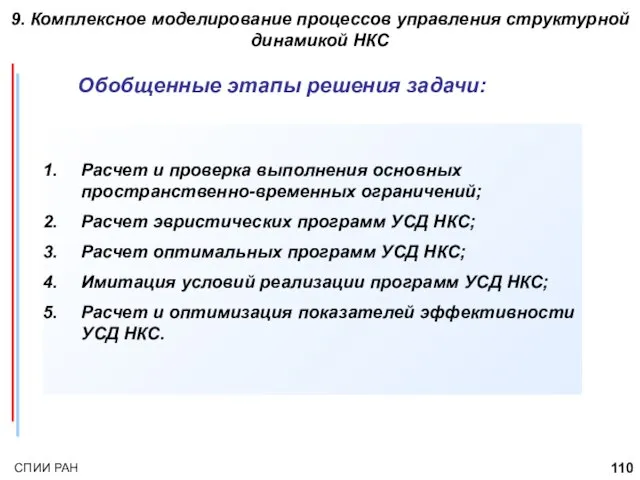
- 110. 9. Комплексное моделирование процессов управления структурной динамикой НКС Обобщенные этапы решения задачи: Расчет и проверка выполнения
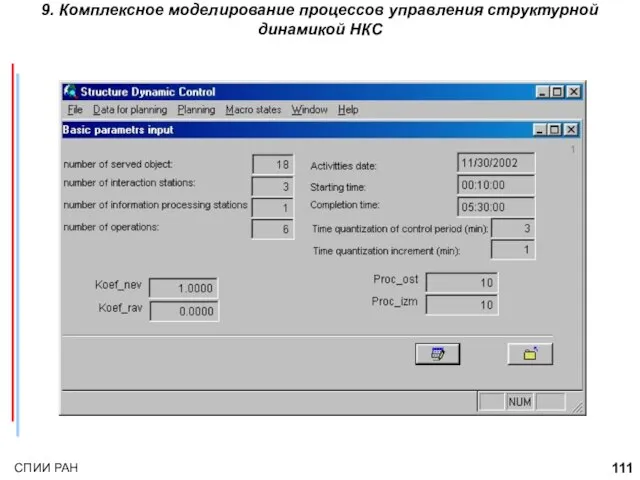
- 111. 9. Комплексное моделирование процессов управления структурной динамикой НКС
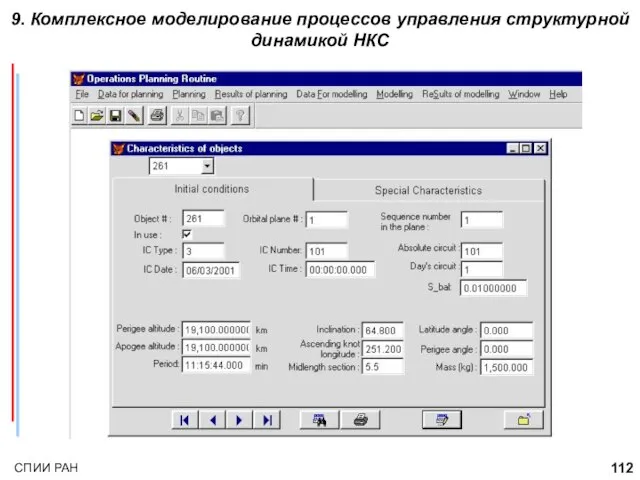
- 112. 9. Комплексное моделирование процессов управления структурной динамикой НКС
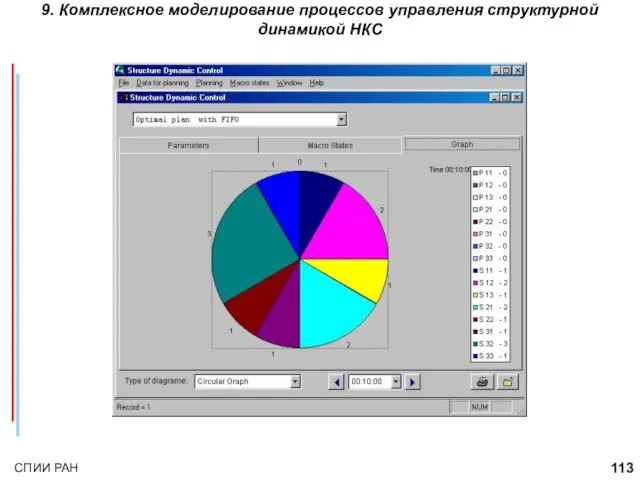
- 113. 9. Комплексное моделирование процессов управления структурной динамикой НКС
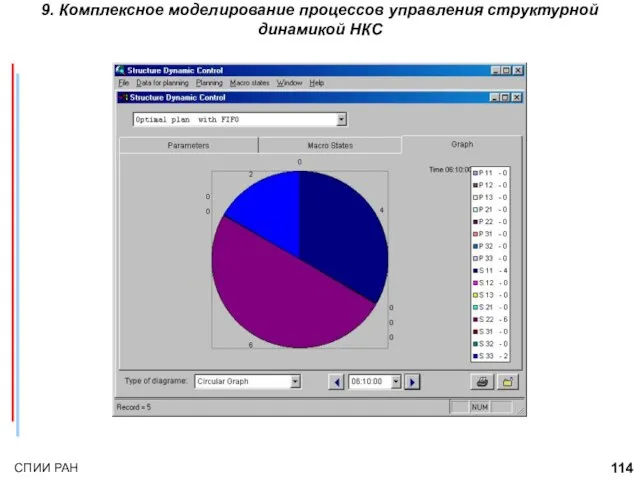
- 114. 9. Комплексное моделирование процессов управления структурной динамикой НКС
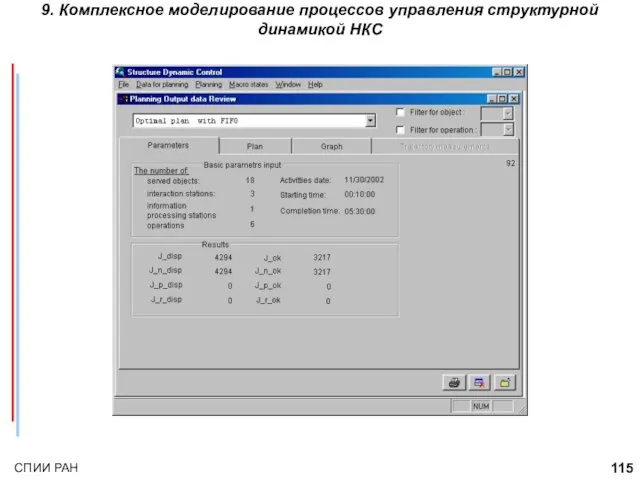
- 115. 9. Комплексное моделирование процессов управления структурной динамикой НКС
- 116. 9. Комплексное моделирование процессов управления структурной динамикой НКС
- 117. 9. Комплексное моделирование процессов управления структурной динамикой НКС
- 118. 9. Комплексное моделирование процессов управления структурной динамикой НКС
- 119. 9. Комплексное моделирование процессов управления структурной динамикой НКС
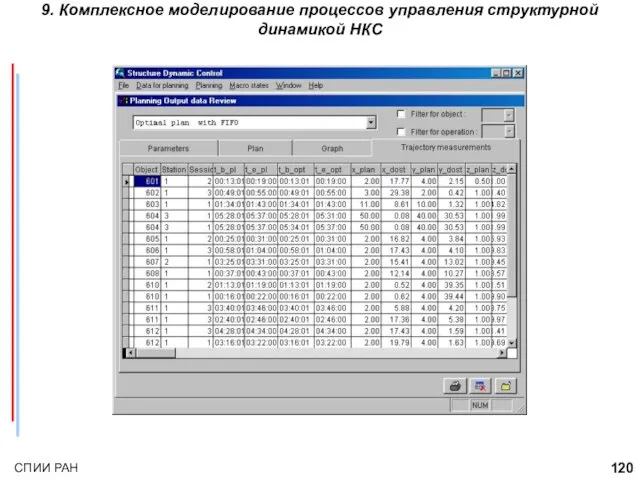
- 120. 9. Комплексное моделирование процессов управления структурной динамикой НКС
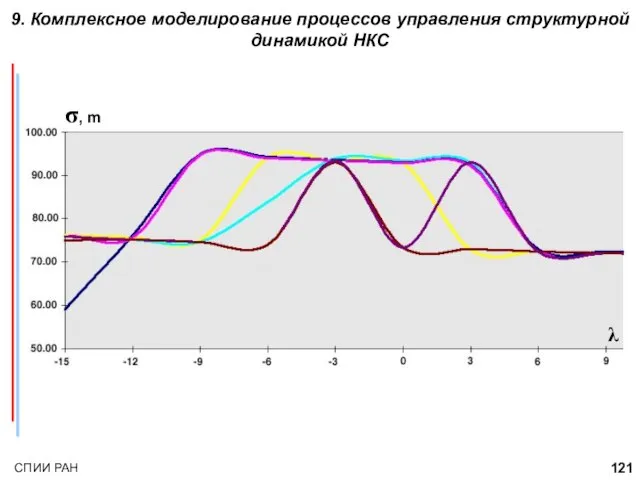
- 121. 9. Комплексное моделирование процессов управления структурной динамикой НКС λ σ, m
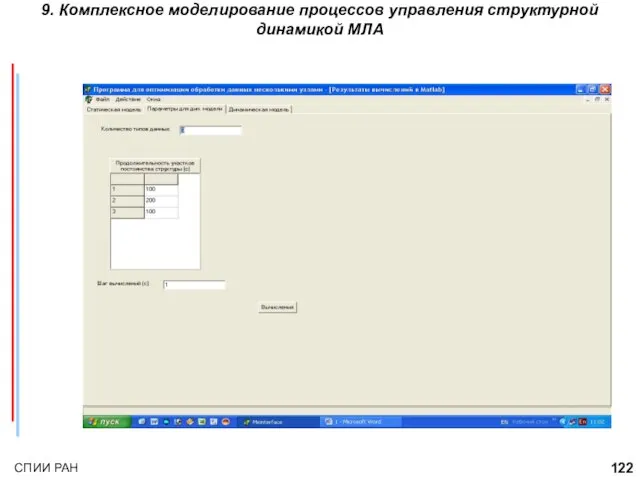
- 122. 9. Комплексное моделирование процессов управления структурной динамикой МЛА
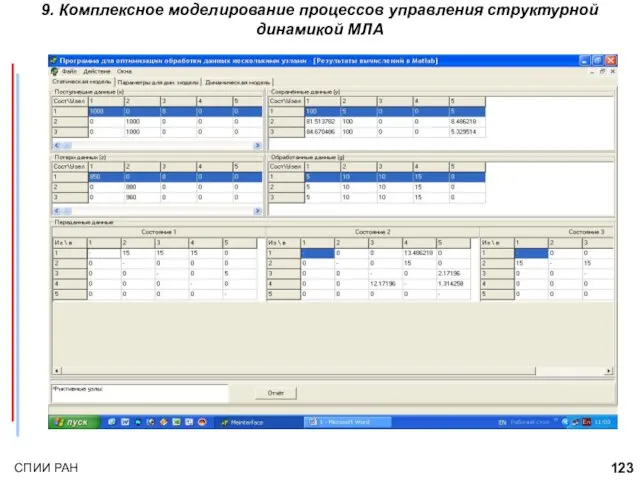
- 123. 9. Комплексное моделирование процессов управления структурной динамикой МЛА
- 124. 9. Комплексное моделирование процессов управления структурной динамикой МЛА
- 125. 9. Комплексное моделирование процессов управления структурной динамикой МЛА
- 126. 9. Комплексное моделирование процессов управления структурной динамикой МЛА
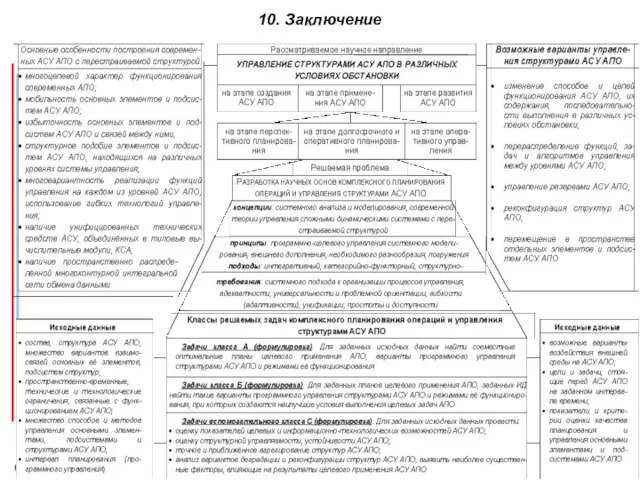
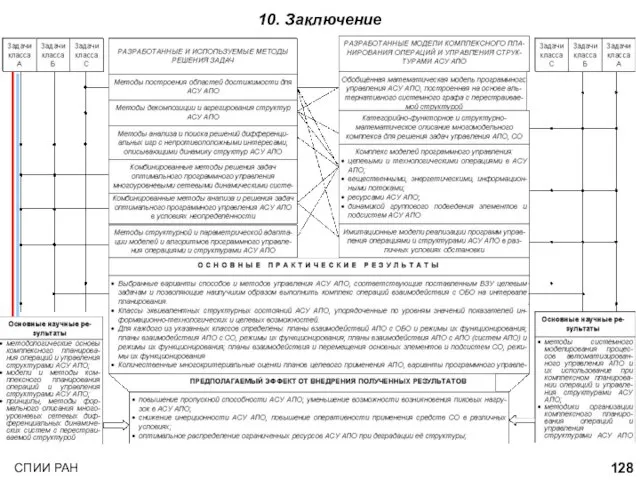
- 127. 10. Заключение
- 128. 10. Заключение
- 129. 11. Благодарности Разработка данной и последующих версий прототипов специального программно-математического обеспечения процессов управления структурной динамикой СТС
- 131. Скачать презентацию
Слайд 3ОСНОВНЫЕ НАУЧНЫЕ РЕЗУЛЬТАТЫ КЛАССИЧЕСКОЙ КИБЕРНЕТИКИ
Доказано, что важнейшим атрибутом любой системы (биологической, технической,
ОСНОВНЫЕ НАУЧНЫЕ РЕЗУЛЬТАТЫ КЛАССИЧЕСКОЙ КИБЕРНЕТИКИ
Доказано, что важнейшим атрибутом любой системы (биологической, технической,
Слайд 4НЕОБХОДИМОСТЬ ДАЛЬНЕЙШЕЙ ЭВОЛЮЦИИ КИБЕРНЕТИКИ
Особенности современных объектов управления:
повышенная сложность и размерность, избыточность,
НЕОБХОДИМОСТЬ ДАЛЬНЕЙШЕЙ ЭВОЛЮЦИИ КИБЕРНЕТИКИ
Особенности современных объектов управления:
повышенная сложность и размерность, избыточность,
Слайд 5ЭВОЛЮЦИЯ КИБЕРНЕТИКИ
Second cybernetics – кибернетика второго порядка – КВП
М.Марума (1963). КВП
ЭВОЛЮЦИЯ КИБЕРНЕТИКИ
Second cybernetics – кибернетика второго порядка – КВП
М.Марума (1963). КВП
Слайд 6ЭВОЛЮЦИЯ КИБЕРНЕТИКИ (продолжение)
Редько В.Г. и др. (с 1993 г.). Эволюционная кибернетика
ЭВОЛЮЦИЯ КИБЕРНЕТИКИ (продолжение)
Редько В.Г. и др. (с 1993 г.). Эволюционная кибернетика
Слайд 7Неокибернетика
междисциплинарная наука, ориентированная на разработку методологии постановки и решения проблем анализа и
Неокибернетика
междисциплинарная наука, ориентированная на разработку методологии постановки и решения проблем анализа и
Слайд 8ИСХОДНОЕ ПОНИМАНИЕ ИНФОРМАТИКИ
«ИНФОРМАТИКА – научная дисциплина, изучающая структуру и общие свойства научной
ИСХОДНОЕ ПОНИМАНИЕ ИНФОРМАТИКИ
«ИНФОРМАТИКА – научная дисциплина, изучающая структуру и общие свойства научной
Слайд 9ОПРЕДЕЛЕНИЯ ИНФОРМАТИКИ
Наука о преобразовании информации, которая базируется на вычислительной технике. Предметом информатики
ОПРЕДЕЛЕНИЯ ИНФОРМАТИКИ
Наука о преобразовании информации, которая базируется на вычислительной технике. Предметом информатики
Слайд 101 Информация
2 Информационные
процессы
Информационные технологии
Информатизация
Аппаратное обеспечение
(hardware)
Математическое и программное обеспечение
(brain-software)
Организационно-методическое обеспечение
1 Информация
2 Информационные
процессы
Информационные технологии
Информатизация
Аппаратное обеспечение
(hardware)
Математическое и программное обеспечение
(brain-software)
Организационно-методическое обеспечение
Слайд 11ИНФОРМАТИКА – наука о методах и средствах сбора, хранения, передачи, представления, обработки
ИНФОРМАТИКА – наука о методах и средствах сбора, хранения, передачи, представления, обработки
Слайд 12РАЗВИВАЮЩИЕСЯ РАЗДЕЛЫ ИНФОРМАТИКИ:
извлечение знаний из данных;
машинное обучение;
многоагентные системы
компьютерное зрение;
речевая информатика;
стеганография и стеганоанализ;
интеллектуальные
РАЗВИВАЮЩИЕСЯ РАЗДЕЛЫ ИНФОРМАТИКИ:
извлечение знаний из данных;
машинное обучение;
многоагентные системы
компьютерное зрение;
речевая информатика;
стеганография и стеганоанализ;
интеллектуальные
Слайд 13ОСНОВНЫЕ ПРИЧИНЫ «БЛИЗОСТИ» ИНФОРМАТИКИ И КИБЕРНЕТИКИ
Информатика развивалась в недрах кибернетики, практически на
ОСНОВНЫЕ ПРИЧИНЫ «БЛИЗОСТИ» ИНФОРМАТИКИ И КИБЕРНЕТИКИ
Информатика развивалась в недрах кибернетики, практически на
Слайд 14«Информатика – кибернетика на современном этапе»
(Бирюков Б.В., 1989)
«… совокупность научных направлений, называемых
«Информатика – кибернетика на современном этапе»
(Бирюков Б.В., 1989)
«… совокупность научных направлений, называемых
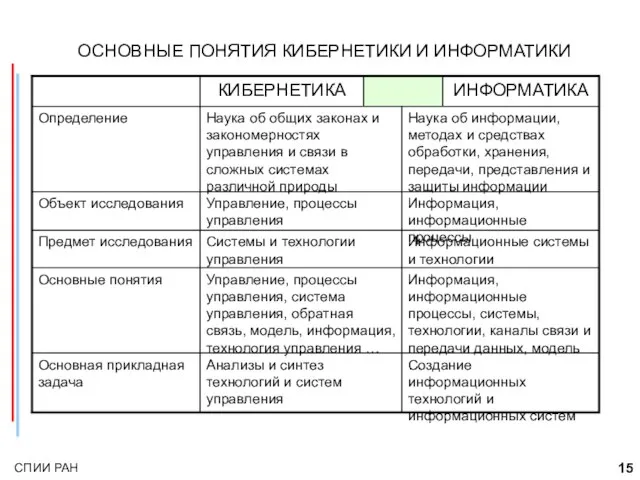
Слайд 15ОСНОВНЫЕ ПОНЯТИЯ КИБЕРНЕТИКИ И ИНФОРМАТИКИ
ОСНОВНЫЕ ПОНЯТИЯ КИБЕРНЕТИКИ И ИНФОРМАТИКИ
Слайд 16ИНТЕГРАЦИЯ ИНФОРМАТИКИ И КИБЕРНЕТИКИ
адаптивные компьютерные
системы;
проактивные компьютерные
системы;
адаптивные
ИНТЕГРАЦИЯ ИНФОРМАТИКИ И КИБЕРНЕТИКИ
адаптивные компьютерные
системы;
проактивные компьютерные
системы;
адаптивные

Слайд 17ИНФОРМАЦИОННОЕ УПРАВЛЕНИЕ
Под информационным управлением понимается процесс выработки и реализации управленческих решений в
ИНФОРМАЦИОННОЕ УПРАВЛЕНИЕ
Под информационным управлением понимается процесс выработки и реализации управленческих решений в
Слайд 18АДАПТИВНЫЕ И ПРОАКТИВНЫЕ КОМПЬЮТЕРНЫЕ СИСТЕМЫ
(proactive computing)
Адаптивные и проактивные компьютерные (proactive computing) системы
АДАПТИВНЫЕ И ПРОАКТИВНЫЕ КОМПЬЮТЕРНЫЕ СИСТЕМЫ
(proactive computing)
Адаптивные и проактивные компьютерные (proactive computing) системы
Слайд 19ПРОГРАММНАЯ КИБЕРНЕТИКА
Первый семинар по программной кибернетики – 2004 г., Гонконг, 28-я Международная
ПРОГРАММНАЯ КИБЕРНЕТИКА
Первый семинар по программной кибернетики – 2004 г., Гонконг, 28-я Международная
Слайд 20ИНТЕГРАЦИЯ ИНФОРМАТИКИ И КИБЕРНЕТИКИ
Предварительный отчет – рекомендация для рамочной программы РП-7 «Исследование
ИНТЕГРАЦИЯ ИНФОРМАТИКИ И КИБЕРНЕТИКИ
Предварительный отчет – рекомендация для рамочной программы РП-7 «Исследование
Слайд 21Определение статической и динамической моделей
С т а т и ч е с
Определение статической и динамической моделей
С т а т и ч е с
Слайд 22Первое условие принципа причинности
Упорядоченность причинно-следственных связей во времени. Это означает, что
Первое условие принципа причинности
Упорядоченность причинно-следственных связей во времени. Это означает, что
Слайд 23Второе условие принципа причинности
Однозначность причинно-следственных связей. Это означает, что состояние и выходная
Второе условие принципа причинности
Однозначность причинно-следственных связей. Это означает, что состояние и выходная
Слайд 24Динамическая система
Первая часть этого принципа эквивалента утверждению о том, что будущее
Динамическая система
Первая часть этого принципа эквивалента утверждению о том, что будущее
Слайд 25Кинематическая модель
К и н е м а т и ч е с
Кинематическая модель
К и н е м а т и ч е с

Слайд 26Расширенная схема кинематической модели
Динамическая система (ДС) задается с использованием 4-х основных (базисных)
Расширенная схема кинематической модели
Динамическая система (ДС) задается с использованием 4-х основных (базисных)
Слайд 27Динамическая система
Каждое из множеств X, V, Y может быть в свою
Динамическая система
Каждое из множеств X, V, Y может быть в свою
Слайд 28Основные классы задач теории управления ДС (ТУ ДС) (детерминированный вариант задания исходных
Основные классы задач теории управления ДС (ТУ ДС) (детерминированный вариант задания исходных

Слайд 29Примеры динамических систем
Конечномерные дифференциальные динамические системы (КДДС)
X, V, Y – представляет
Примеры динамических систем
Конечномерные дифференциальные динамические системы (КДДС)
X, V, Y – представляет
Слайд 30Конечные автоматы (1)
Рассмотрим частный случай ДС — конечные автоматы (КА) (конечные ДС).
В
Конечные автоматы (1)
Рассмотрим частный случай ДС — конечные автоматы (КА) (конечные ДС).
В
Слайд 31Конечные автоматы (2)
Автомат 1 рода — несдвинутая выходная ф-ция
Автомат 2 рода —
Конечные автоматы (2)
Автомат 1 рода — несдвинутая выходная ф-ция
Автомат 2 рода —
Слайд 32Способы задания конечных автоматов (1)
X={a1, a2, a3, a4}, Y={c1, c2}, U={b1, b2},
Возможен
Способы задания конечных автоматов (1)
X={a1, a2, a3, a4}, Y={c1, c2}, U={b1, b2},
Возможен
Слайд 33Способы задания конечных автоматов (2)
в) Матричный вариант задания КА
(используются специальные
Способы задания конечных автоматов (2)
в) Матричный вариант задания КА (используются специальные
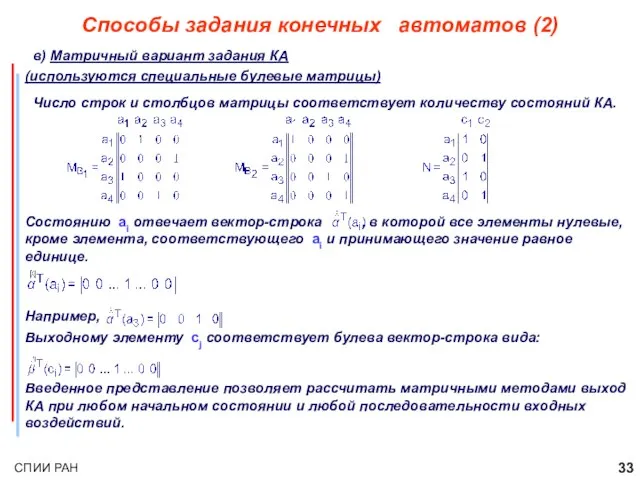
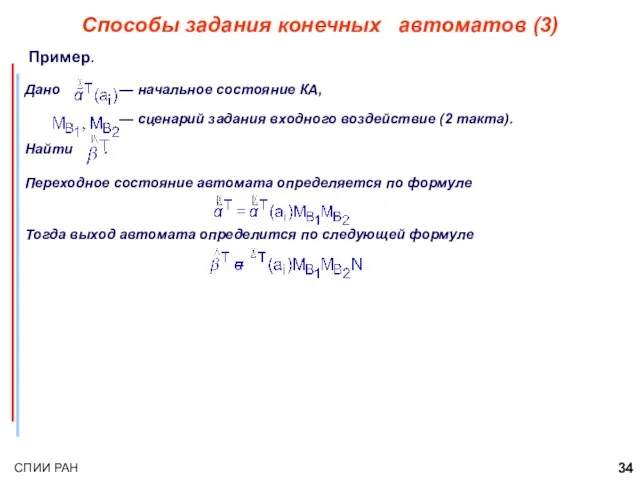
Слайд 34Способы задания конечных автоматов (3)
Пример.
Дано — начальное состояние КА,
—
Способы задания конечных автоматов (3)
Пример.
Дано — начальное состояние КА,
—
Слайд 351. Примеры сложных технических систем
Топологическая структура орбитальной системы навигационных космических аппаратов
1. Примеры сложных технических систем
Топологическая структура орбитальной системы навигационных космических аппаратов

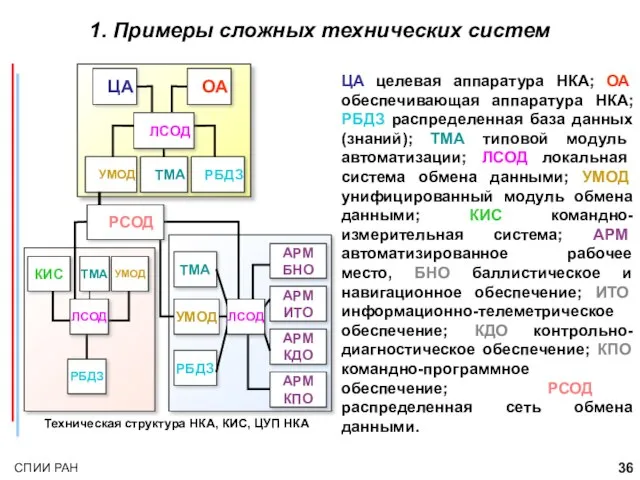
Слайд 361. Примеры сложных технических систем
ЦА целевая аппаратура НКА; ОА обеспечивающая аппаратура НКА;
1. Примеры сложных технических систем
ЦА целевая аппаратура НКА; ОА обеспечивающая аппаратура НКА;
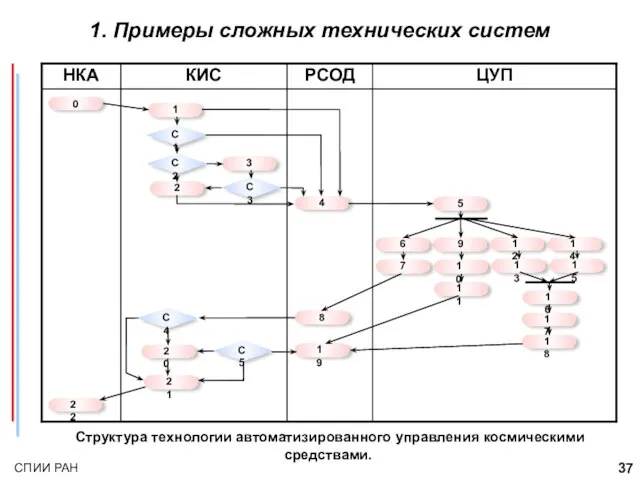
Слайд 371. Примеры сложных технических систем
Структура технологии автоматизированного управления космическими средствами.
1. Примеры сложных технических систем
Структура технологии автоматизированного управления космическими средствами.
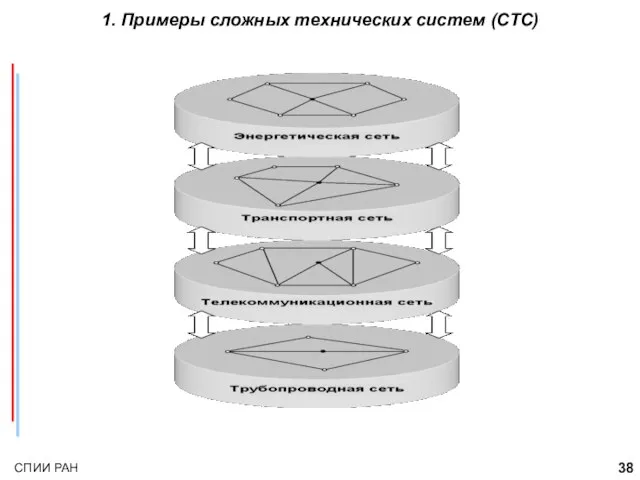
Слайд 381. Примеры сложных технических систем (CTС)
1. Примеры сложных технических систем (CTС)
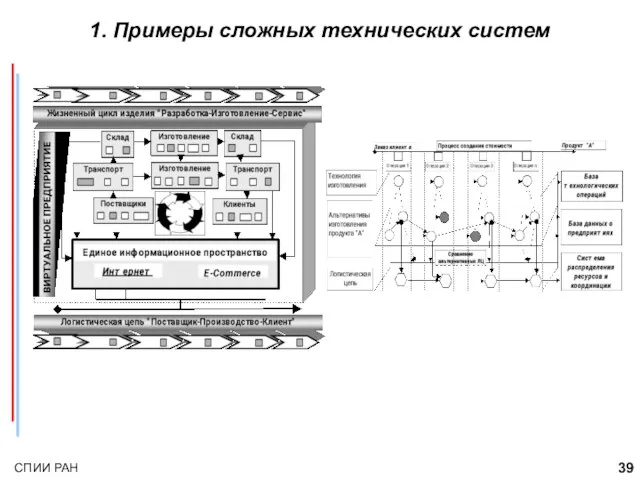
Слайд 391. Примеры сложных технических систем
1. Примеры сложных технических систем
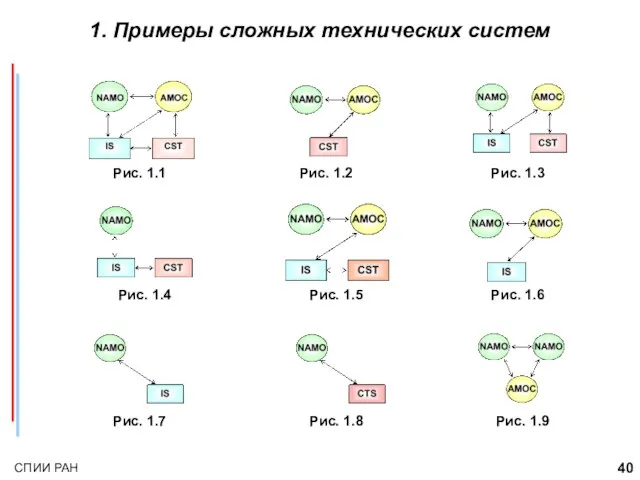
Слайд 401. Примеры сложных технических систем
Рис. 1.1
Рис. 1.2
Рис. 1.3
Рис. 1.4
Рис. 1.5
Рис. 1.6
Рис. 1.7
Рис.
1. Примеры сложных технических систем
Рис. 1.1
Рис. 1.2
Рис. 1.3
Рис. 1.4
Рис. 1.5
Рис. 1.6
Рис. 1.7
Рис.
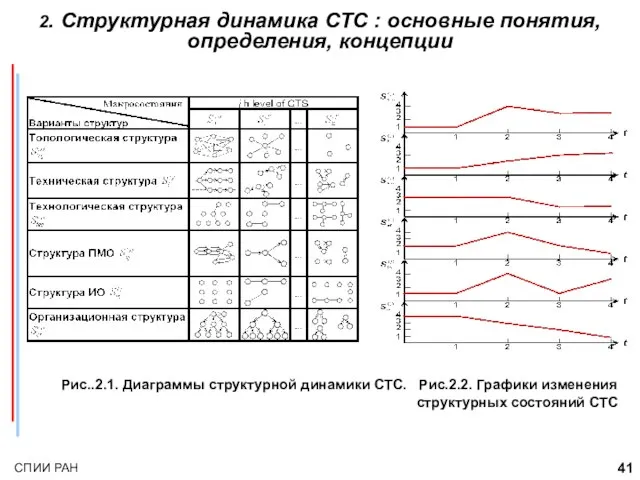
Слайд 412. Структурная динамика СТС : основные понятия, определения, концепции
Рис..2.1. Диаграммы структурной динамики
2. Структурная динамика СТС : основные понятия, определения, концепции
Рис..2.1. Диаграммы структурной динамики
Слайд 42 изменение способов, целей функционирования СТС, их содержания, последовательности выполнения в различных
изменение способов, целей функционирования СТС, их содержания, последовательности выполнения в различных
Слайд 432. Структурная динамика СТС : основные понятия, определения, концепции
2. Структурная динамика СТС : основные понятия, определения, концепции
Слайд 442. Структурная динамика СТС : основные понятия, определения, концепции
Стандартная технология реконфигурации СТС
2. Структурная динамика СТС : основные понятия, определения, концепции
Стандартная технология реконфигурации СТС
Слайд 452. Структурная динамика СТС : основные понятия, определения, концепции
1- ПРД TК
2
2. Структурная динамика СТС : основные понятия, определения, концепции
1- ПРД TК
2
Слайд 46В современных условиях исследование проблем управления структурной динамикой осуществляется в рамках следующих
В современных условиях исследование проблем управления структурной динамикой осуществляется в рамках следующих
Слайд 47Главная трудность решения задач управления структурной динамикой состоит в следующем:
Определение оптимальных
Главная трудность решения задач управления структурной динамикой состоит в следующем:
Определение оптимальных
Слайд 48проблемы большой размерности и нелинейности моделей, описывающих структуру и варианты функционирования элементов
проблемы большой размерности и нелинейности моделей, описывающих структуру и варианты функционирования элементов
Слайд 49Проблема управления структурной динамикой СТС предполагают решение четырех основных классов задач:
задачи комплексного
задачи комплексного
Слайд 50Рис.3.1. Место теории управления структурной динамикой СТС в системе междисциплинарных исследований
3.
Рис.3.1. Место теории управления структурной динамикой СТС в системе междисциплинарных исследований
3.

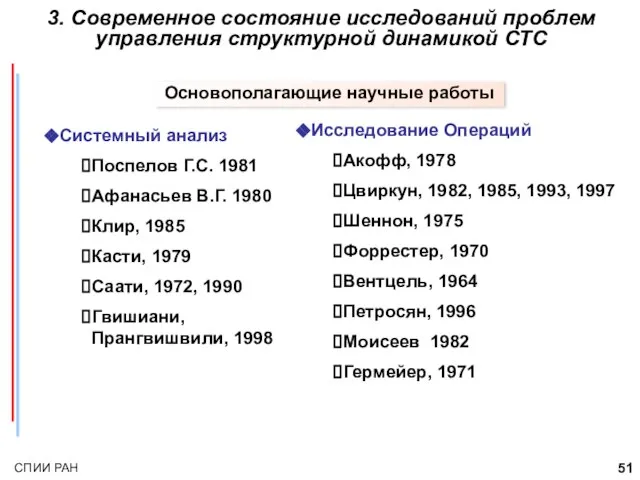
Слайд 513. Современное состояние исследований проблем
управления структурной динамикой СТС
Основополагающие научные работы
Системный анализ
Поспелов
3. Современное состояние исследований проблем
управления структурной динамикой СТС
Основополагающие научные работы
Системный анализ
Поспелов
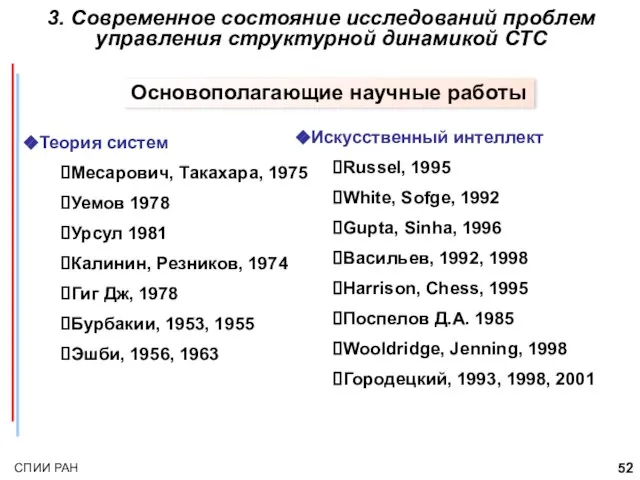
Слайд 523. Современное состояние исследований проблем
управления структурной динамикой СТС
Основополагающие научные работы
Теория систем
Месарович, Такахара,
3. Современное состояние исследований проблем
управления структурной динамикой СТС
Основополагающие научные работы
Теория систем
Месарович, Такахара,
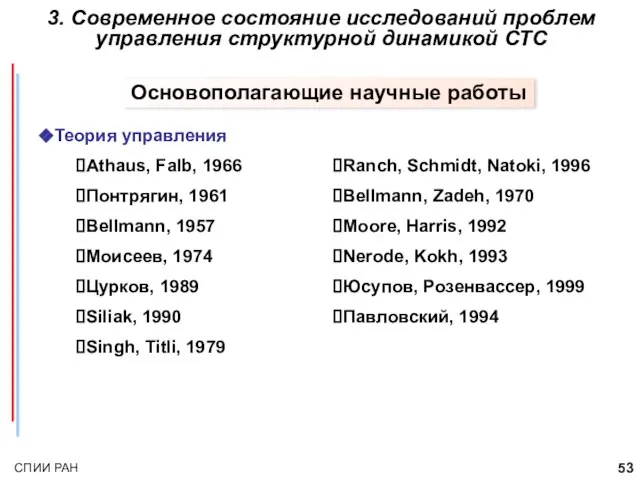
Слайд 533. Современное состояние исследований проблем
управления структурной динамикой СТС
Основополагающие научные работы
Теория управления
Athaus, Falb,
3. Современное состояние исследований проблем
управления структурной динамикой СТС
Основополагающие научные работы
Теория управления
Athaus, Falb,
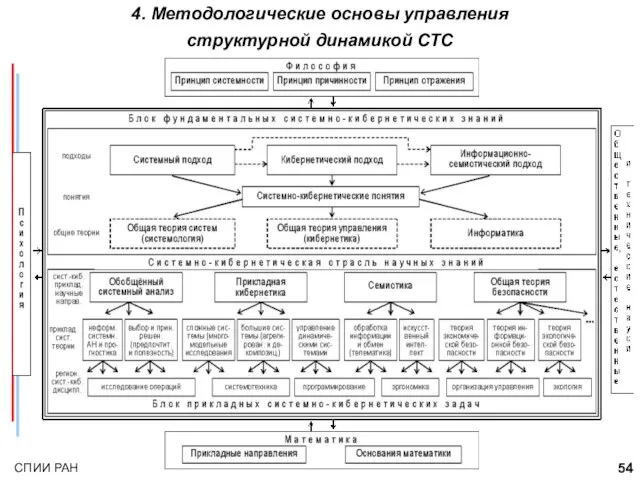
Слайд 544. Методологические основы управления
структурной динамикой СТС
4. Методологические основы управления
структурной динамикой СТС
Слайд 554. Методологические основы управления
структурной динамикой СТС
Методологические основы теории УСД СТС включают
4. Методологические основы управления
структурной динамикой СТС
Методологические основы теории УСД СТС включают
Слайд 56Таблица 1
5. Комплексное моделирование процессов управления структурной динамикой СТС
Таблица 1
5. Комплексное моделирование процессов управления структурной динамикой СТС
Слайд 57
5. Комплексное моделирование процессов управления структурной динамикой СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС
Слайд 585. Комплексное моделирование процессов управления структурной динамикой СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС

Слайд 595. Комплексное моделирование процессов управления структурной динамикой СТС
n
5. Комплексное моделирование процессов управления структурной динамикой СТС
n
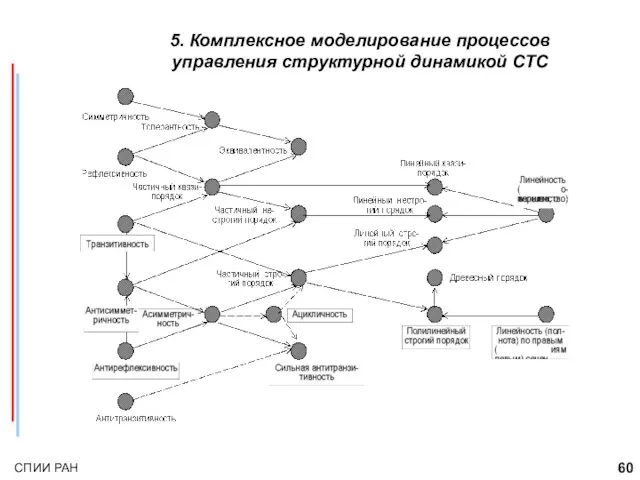
Слайд 605. Комплексное моделирование процессов управления структурной динамикой СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС
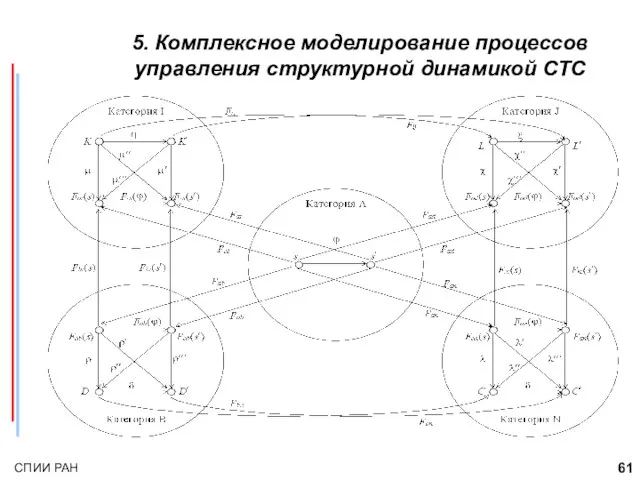
Слайд 615. Комплексное моделирование процессов управления структурной динамикой СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС
Слайд 62Рис. 5.1. Обобщенная структурная схема активного подвижного объекта
5. Комплексное моделирование процессов управления
Рис. 5.1. Обобщенная структурная схема активного подвижного объекта
5. Комплексное моделирование процессов управления

Слайд 63Рис.5.2. Фрагмент диаграммы переходов из обобщенных состояний АПО первого типа
5. Комплексное
Рис.5.2. Фрагмент диаграммы переходов из обобщенных состояний АПО первого типа
5. Комплексное

Слайд 645. Комплексное моделирование процессов управления структурной динамикой СТС
Рис.5.3. Возможные варианты интерпретации АПО
5. Комплексное моделирование процессов управления структурной динамикой СТС
Рис.5.3. Возможные варианты интерпретации АПО

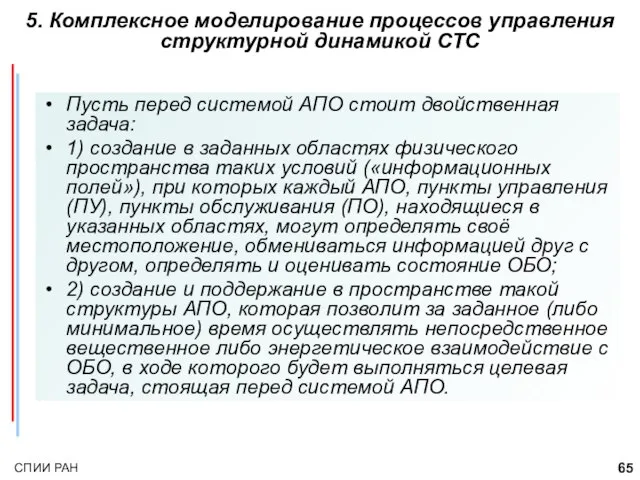
Слайд 65Пусть перед системой АПО стоит двойственная задача:
1) создание в заданных областях физического
Пусть перед системой АПО стоит двойственная задача:
1) создание в заданных областях физического
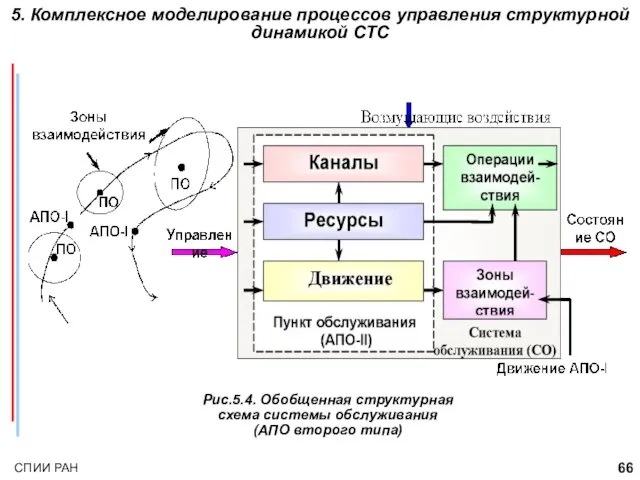
Слайд 665. Комплексное моделирование процессов управления структурной динамикой СТС
Рис.5.4. Обобщенная структурная схема системы
5. Комплексное моделирование процессов управления структурной динамикой СТС
Рис.5.4. Обобщенная структурная схема системы
Слайд 67Рис.5.5. Фрагмент диаграммы переходов из обобщенных состояний АПО второго типа
5. Комплексное
Рис.5.5. Фрагмент диаграммы переходов из обобщенных состояний АПО второго типа
5. Комплексное
Слайд 685. Комплексное моделирование процессов управления структурной динамикой СТС
Рис. 5.6. Графическая и теоретико-множественная
5. Комплексное моделирование процессов управления структурной динамикой СТС
Рис. 5.6. Графическая и теоретико-множественная
Слайд 69Пример структурной динамики группировки АПО
An – Активный Подвижный Объект с номером
Пример структурной динамики группировки АПО
An – Активный Подвижный Объект с номером
Слайд 705. Комплексное моделирование процессов управления структурной динамикой СТС
Рис. 5.8. Геометрическая интерпретация задачи
5. Комплексное моделирование процессов управления структурной динамикой СТС
Рис. 5.8. Геометрическая интерпретация задачи

Слайд 715. Комплексное моделирование процессов управления структурной динамикой СТС СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС СТС
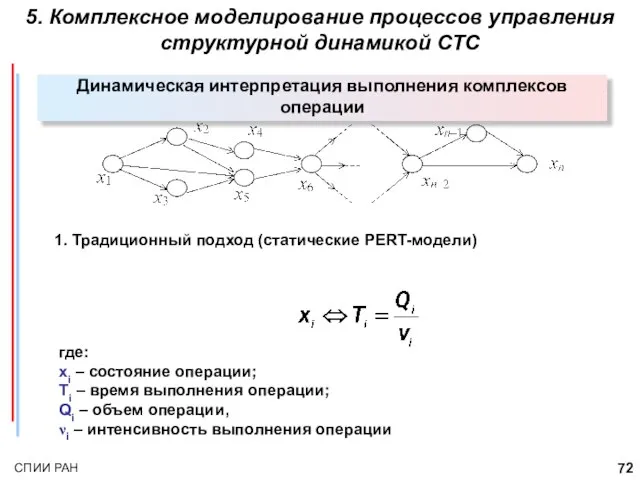
Слайд 725. Комплексное моделирование процессов управления структурной динамикой СТС
Динамическая интерпретация выполнения комплексов операции
1.
5. Комплексное моделирование процессов управления структурной динамикой СТС
Динамическая интерпретация выполнения комплексов операции
1.
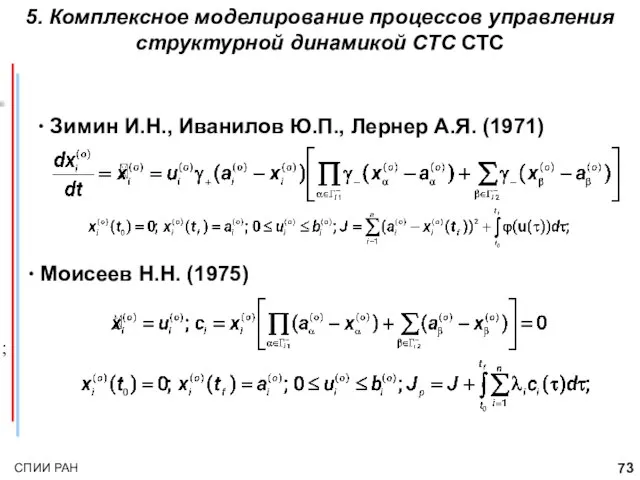
Слайд 735. Комплексное моделирование процессов управления структурной динамикой СТС СТС
;
Зимин И.Н.,
5. Комплексное моделирование процессов управления структурной динамикой СТС СТС
;
Зимин И.Н.,
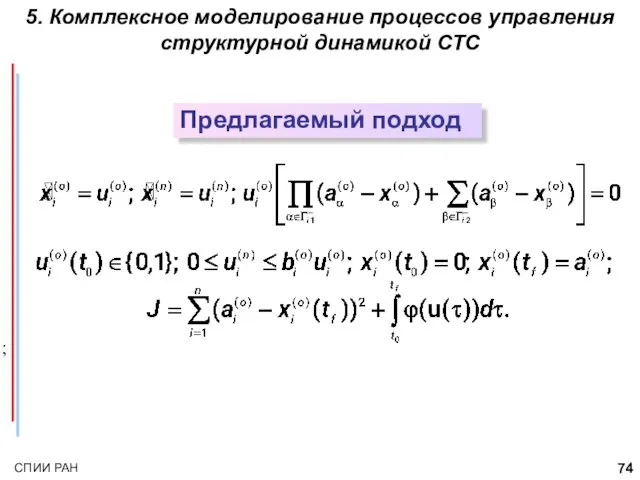
Слайд 745. Комплексное моделирование процессов управления структурной динамикой СТС
;
Предлагаемый подход
5. Комплексное моделирование процессов управления структурной динамикой СТС
;
Предлагаемый подход
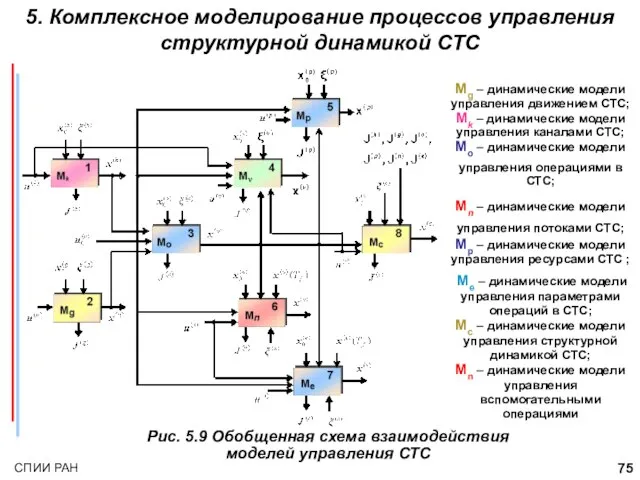
Слайд 75Мg – динамические модели управления движением СТС;
Мk – динамические модели управления
Мg – динамические модели управления движением СТС; Мk – динамические модели управления
Слайд 76Рис.5.10. Обобщенная технология параметрической и структурной адаптации аналитико-имитационных моделей УСД СТС
5. Комплексное
Рис.5.10. Обобщенная технология параметрической и структурной адаптации аналитико-имитационных моделей УСД СТС
5. Комплексное
Слайд 775. Комплексное моделирование процессов управления структурной динамикой СТС
(5.1)
(5.2)
(5.3)
(5.4)
(5.5)
(5.6)
(5.7)
5. Комплексное моделирование процессов управления структурной динамикой СТС
(5.1)
(5.2)
(5.3)
(5.4)
(5.5)
(5.6)
(5.7)
Слайд 785. Комплексное моделирование процессов управления структурной динамикой СТС
(5.8)
, k = 1,2,...,K.
(5.9)
(5.10)
(5.11)
(5.12)
(5.13)
(5.14)
(5.15)
5. Комплексное моделирование процессов управления структурной динамикой СТС
(5.8)
, k = 1,2,...,K.
(5.9)
(5.10)
(5.11)
(5.12)
(5.13)
(5.14)
(5.15)
Слайд 795. Комплексное моделирование процессов управления структурной динамикой СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС
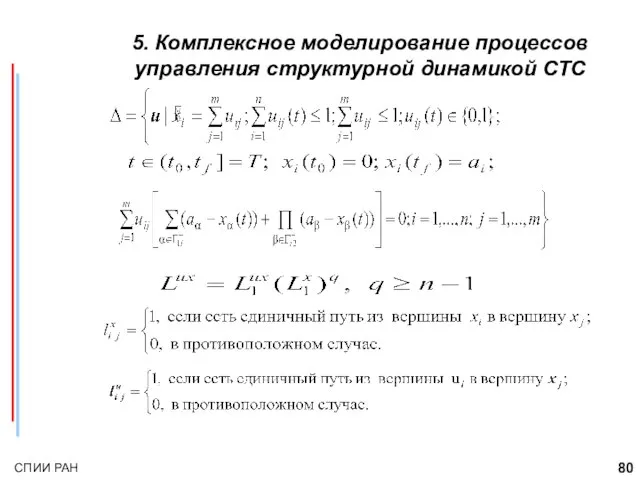
Слайд 805. Комплексное моделирование процессов управления структурной динамикой СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС
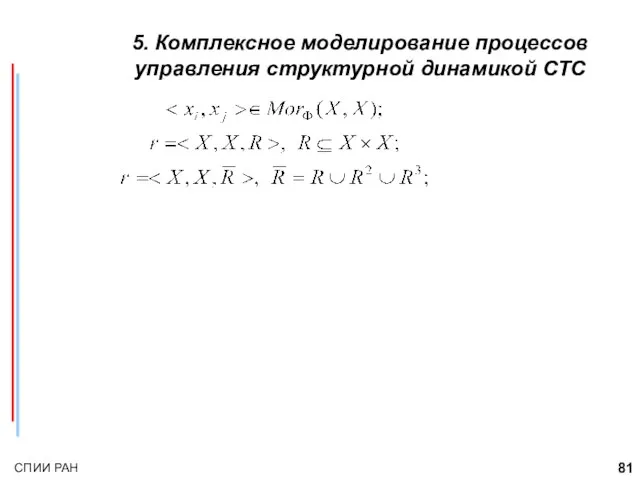
Слайд 815. Комплексное моделирование процессов управления структурной динамикой СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС
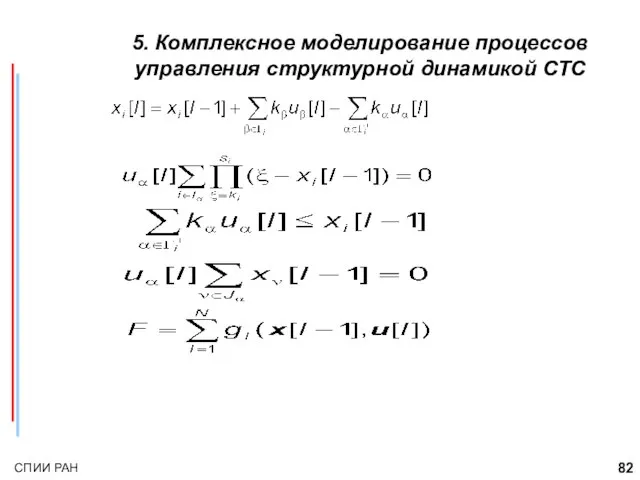
Слайд 825. Комплексное моделирование процессов управления структурной динамикой СТС
5. Комплексное моделирование процессов управления структурной динамикой СТС
Слайд 83 6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых
6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых
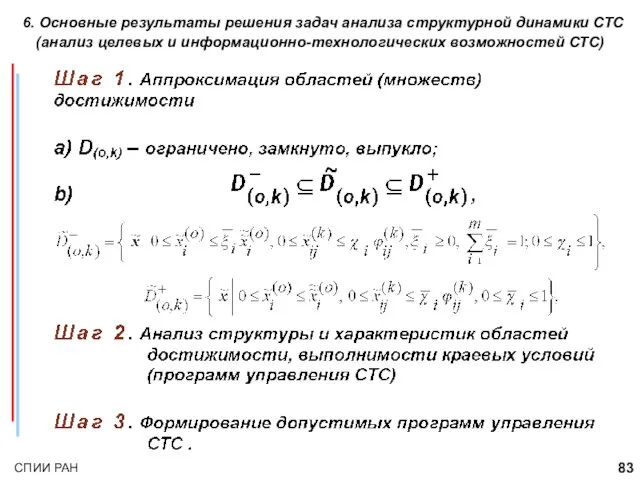
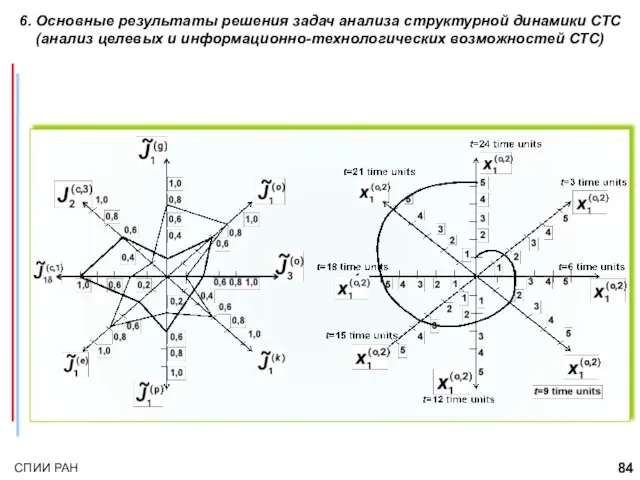
Слайд 846. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и
6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и
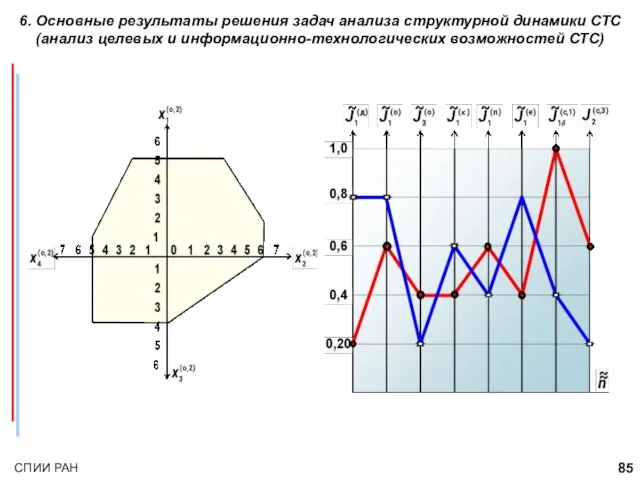
Слайд 856. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и
6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и
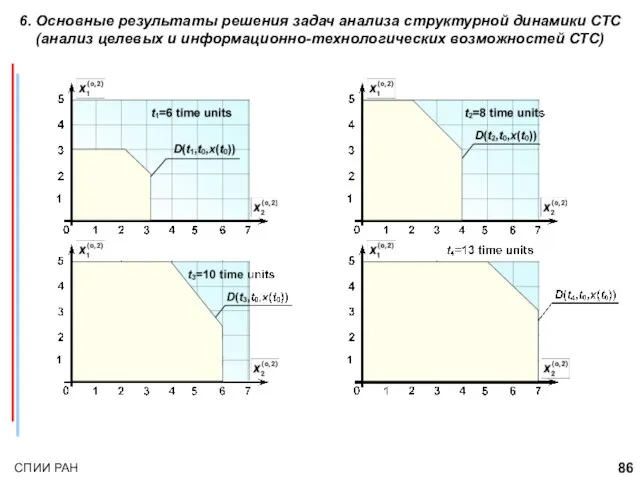
Слайд 866. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и
6. Основные результаты решения задач анализа структурной динамики СТС (анализ целевых и
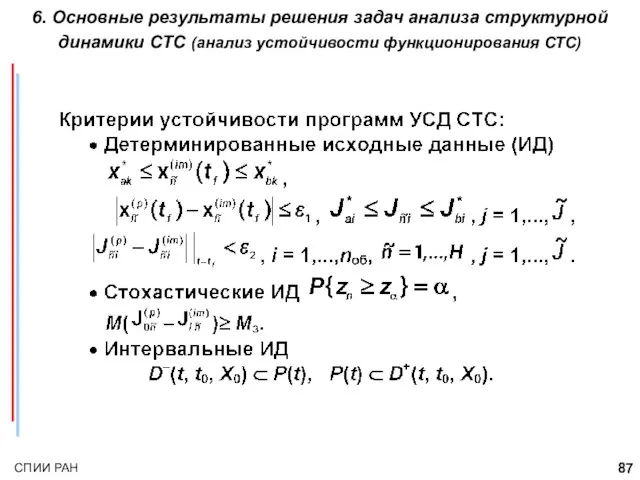
Слайд 876. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования
6. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования
Слайд 886. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования
6. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования
Слайд 896. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования
6. Основные результаты решения задач анализа структурной динамики СТС (анализ устойчивости функционирования
Слайд 906. Основные результаты решения задач анализа структурной динамики СТС
6. Основные результаты решения задач анализа структурной динамики СТС
Слайд 917. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 927. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 937. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 947. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 957. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 967. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 977. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 987. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Пример формализации
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Пример формализации
Слайд 997. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Исходная постановка
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Исходная постановка
Слайд 100Обобщенная процедура решения задач УСД СТС должна включать
следующие основные фазы:
На первой фазе
Обобщенная процедура решения задач УСД СТС должна включать
следующие основные фазы:
На первой фазе
Слайд 101Шаг 1. Формирование, анализ и интерпретация исходных данных, используемых при генерировании (синтезе)
Шаг 1. Формирование, анализ и интерпретация исходных данных, используемых при генерировании (синтезе)
Слайд 1027. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 1037. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
7. Обобщенная процедура решения задач выбора программ управления структурной динамикой СТС
Слайд 104Шаг 1. В интерактивном режиме осуществляется автоматизированная подготовка, контроль, анализ и ввод
Шаг 1. В интерактивном режиме осуществляется автоматизированная подготовка, контроль, анализ и ввод
Слайд 105Шаг 4. Автоматизированный ввод допустимых вариантов функционирования СТС, проверка корректности заданной системы
Шаг 4. Автоматизированный ввод допустимых вариантов функционирования СТС, проверка корректности заданной системы
Слайд 106Шаг 7. Структурная и параметрическая адаптация плана, СПМО и ИО ИС к
Шаг 7. Структурная и параметрическая адаптация плана, СПМО и ИО ИС к
Слайд 107
ИВЦ
потребителей
-
НКУ НКА
ЦУП
8. Обобщенная
ИВЦ
потребителей
-
НКУ НКА
ЦУП
8. Обобщенная
Слайд 1089. Комплексное моделирование процессов управления структурной динамикой НКС
Рис. 12.1. Пример агрегированной диаграммы
9. Комплексное моделирование процессов управления структурной динамикой НКС
Рис. 12.1. Пример агрегированной диаграммы
Слайд 1099. Комплексное моделирование процессов управления структурной динамикой НКС
Состав обобщенных исходных данных:
Варианты топологических
9. Комплексное моделирование процессов управления структурной динамикой НКС
Состав обобщенных исходных данных:
Варианты топологических
Слайд 1109. Комплексное моделирование процессов управления структурной динамикой НКС
Обобщенные этапы решения задачи:
Расчет и
9. Комплексное моделирование процессов управления структурной динамикой НКС
Обобщенные этапы решения задачи:
Расчет и
Слайд 1119. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
Слайд 1129. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
Слайд 1139. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
Слайд 1149. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
Слайд 1159. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
Слайд 1169. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
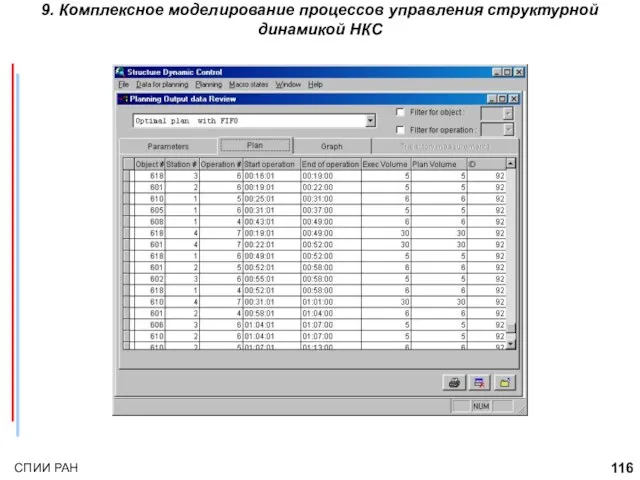
Слайд 1179. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
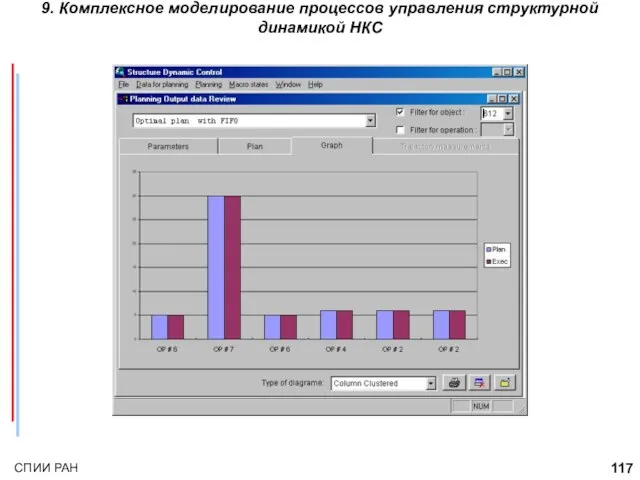
Слайд 1189. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
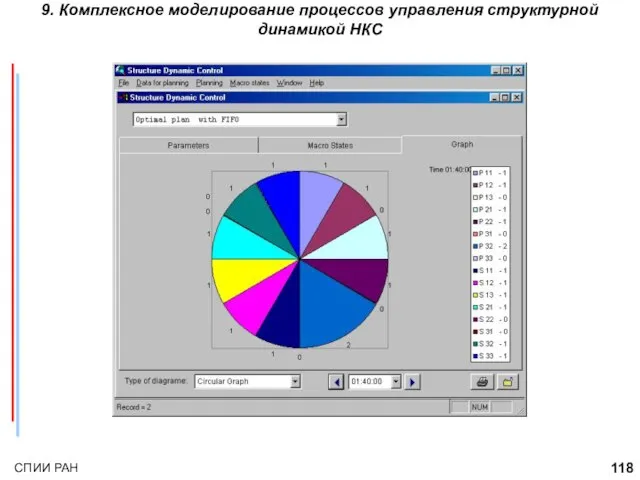
Слайд 1199. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
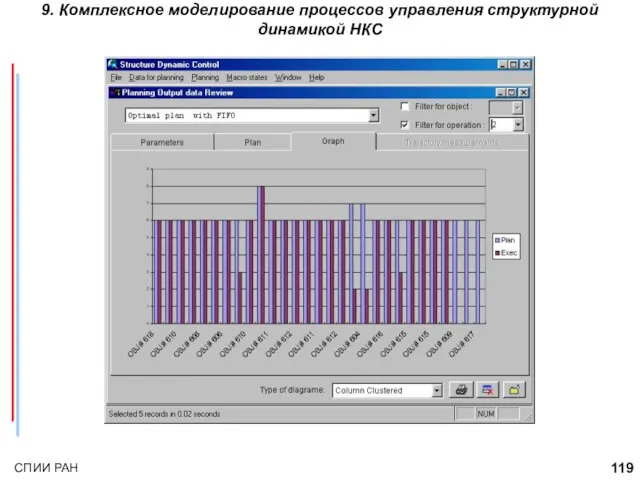
Слайд 1209. Комплексное моделирование процессов управления структурной динамикой НКС
9. Комплексное моделирование процессов управления структурной динамикой НКС
Слайд 1219. Комплексное моделирование процессов управления структурной динамикой НКС
λ
σ, m
9. Комплексное моделирование процессов управления структурной динамикой НКС
λ
σ, m
Слайд 1229. Комплексное моделирование процессов управления структурной динамикой МЛА
9. Комплексное моделирование процессов управления структурной динамикой МЛА
Слайд 1239. Комплексное моделирование процессов управления структурной динамикой МЛА
9. Комплексное моделирование процессов управления структурной динамикой МЛА
Слайд 1249. Комплексное моделирование процессов управления структурной динамикой МЛА
9. Комплексное моделирование процессов управления структурной динамикой МЛА
Слайд 1259. Комплексное моделирование процессов управления структурной динамикой МЛА
9. Комплексное моделирование процессов управления структурной динамикой МЛА
Слайд 1269. Комплексное моделирование процессов управления структурной динамикой МЛА
9. Комплексное моделирование процессов управления структурной динамикой МЛА
Слайд 12710. Заключение
10. Заключение
Слайд 12810. Заключение
10. Заключение
Слайд 12911. Благодарности
Разработка данной и последующих версий прототипов специального программно-математического обеспечения процессов
11. Благодарности
Разработка данной и последующих версий прототипов специального программно-математического обеспечения процессов
 Посмотрите, это я
Посмотрите, это я Обобщение по теме: «Однородные члены предложения»
Обобщение по теме: «Однородные члены предложения» Научное обеспечение развития стратегии пищевой и перерабатывающей промышленности
Научное обеспечение развития стратегии пищевой и перерабатывающей промышленности Трудовое право. Формы регулирования труда работников. Система и особенности источников трудового права
Трудовое право. Формы регулирования труда работников. Система и особенности источников трудового права ИСТОРИЯ ЧАСОВ
ИСТОРИЯ ЧАСОВ Что такое кротость?
Что такое кротость? Генрих Герц
Генрих Герц Эрмитаж. Новая концепция интерфейса платформы «1С-Битрикс 9.5»
Эрмитаж. Новая концепция интерфейса платформы «1С-Битрикс 9.5» Дифференциальная диагностика нейроинфекций
Дифференциальная диагностика нейроинфекций Современная терапия артериальной гипертензии
Современная терапия артериальной гипертензии  Опишите картинку
Опишите картинку Географические координаты Долгота и широта
Географические координаты Долгота и широта Комплексное решение для автоматизации предприятий сферы ЖКХ
Комплексное решение для автоматизации предприятий сферы ЖКХ 3 сыйныфта татар теле дәресе
3 сыйныфта татар теле дәресе Совершенствование воспитательной системы в школах Пензенской области
Совершенствование воспитательной системы в школах Пензенской области Природни забележителности и резервати в Предбалкана
Природни забележителности и резервати в Предбалкана Видеофильм о Балтийске предоставлен авторомБекиш Евгением Александровичем
Видеофильм о Балтийске предоставлен авторомБекиш Евгением Александровичем Юрий Зиссер, генеральный директор УП «Надежные программы» (TUT.BY, hoster.by), зампредседателя ОО «Белинфоком»
Юрий Зиссер, генеральный директор УП «Надежные программы» (TUT.BY, hoster.by), зампредседателя ОО «Белинфоком» Изменение поведения. Мотивация. Мотивационное интервью
Изменение поведения. Мотивация. Мотивационное интервью Казахстан в годы войны против фашистских захватчиков (1941-1945)
Казахстан в годы войны против фашистских захватчиков (1941-1945) Презентация на тему Свободное падение тел
Презентация на тему Свободное падение тел  Одарённость как педагогический и психологический феномен
Одарённость как педагогический и психологический феномен Амфибии
Амфибии Превращение энергии (3 класс)
Превращение энергии (3 класс) A working day
A working day Деловая игра: «Роль электронных образовательных ресурсов в реализации мыслительного подхода»
Деловая игра: «Роль электронных образовательных ресурсов в реализации мыслительного подхода» Британия и ее колонии
Британия и ее колонии Режим дня и его влияние на здоровье ребёнка и качество его обучения Хорошими людьми становятся больше от упражнения, чем от при
Режим дня и его влияние на здоровье ребёнка и качество его обучения Хорошими людьми становятся больше от упражнения, чем от при