- Основы управления в организационно-технических системах

Содержание
- 2. Тема 1. Основы управления в организационно-технических системах Лекция: Системы с управлением 1. Характеристика класса систем с
- 3. Литература по УР,САиМ 1. Системный анализ и принятие решений: учебник. - СПб.: Изд-во СПб УГПС МЧС
- 4. Лекция: Системы с управлением Учебный вопрос 1. Характеристика класса систем с управлением. Построение систем с управлением
- 5. Учебный вопрос 1. Характеристика класса систем с управлением Системы, которым свойственно управление называют: - кибернетическими; -
- 6. Учебный вопрос 1. Характеристика класса систем с управлением Под указанными названиями, за исключением кибернетических систем, в
- 7. Учебный вопрос 1. Характеристика класса систем с управлением Предмет кибернетики: изучение закономерностей управления системами, в которых
- 8. Учебный вопрос 1. Характеристика класса систем с управлением Управление возможно только при определенном уровне организации систем
- 9. Учебный вопрос 1. Характеристика класса систем с управлением Черта 1. В сохранении целостности систем решающая роль
- 10. Учебный вопрос 1. Характеристика класса систем с управлением Черта 4. Системы способны переходить в различные состояния
- 11. Учебный вопрос 1. Характеристика класса систем с управлением Рассмотрим эти черты подробнее: Черта 1. В сохранении
- 12. Учебный вопрос 1. Характеристика класса систем с управлением Ослабление или потеря информационной связи между системными элементами
- 13. Учебный вопрос 1. Характеристика класса систем с управлением Черта 2. Информация, поступающая в системы и содержащаяся
- 14. Учебный вопрос 1. Характеристика класса систем с управлением Черта 3. Каждая система имеет одну или несколько
- 15. Учебный вопрос 1. Характеристика класса систем с управлением Черта 4. Системы способны переходить в различные состояния
- 16. Учебный вопрос 1. Характеристика класса систем с управлением Черта 5. Существует определённое множество допустимых линий поведения
- 17. Учебный вопрос 1. Характеристика класса систем с управлением Черта 6. Системы являются открытыми Воздействия систем на
- 18. Учебный вопрос 1. Характеристика класса систем с управлением Перечисленные черты являются общими и в совокупности дают
- 19. Учебный вопрос 1. Характеристика класса систем с управлением Закономерности управления в системах изучаются кибернетикой Кибернетика охватывает
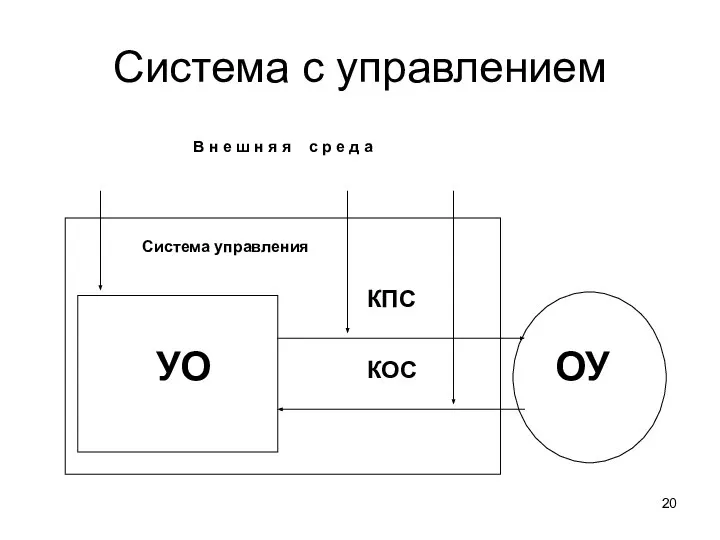
- 20. Система с управлением
- 21. Учебный вопрос 1. Построение систем с управлением Выделяют следующие принципы управления в системах с управлением: -
- 22. Особенности децентрализованного управления Выработка управляющих воздействий и их реализация при децентрализованном управлении осуществляется отдельными подсистемами независимо
- 23. Особенности децентрализованного управления Достоинства децентрализованного управления: - УО максимально приближены к ОУ; - малая инерционность и
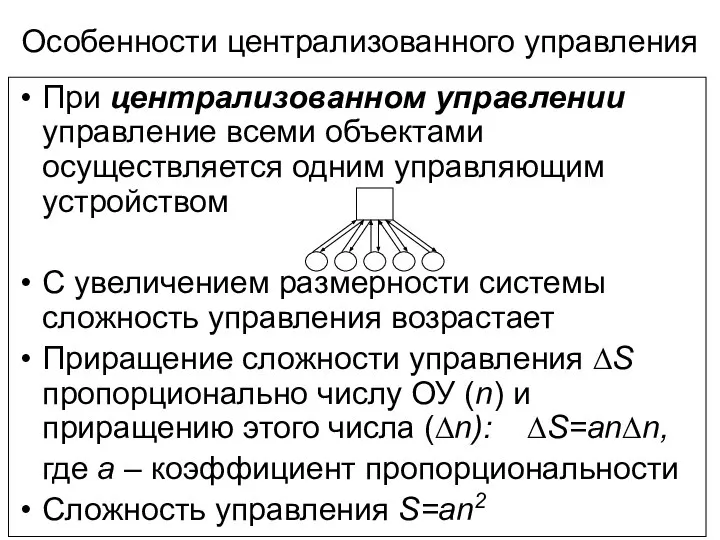
- 24. Особенности централизованного управления При централизованном управлении управление всеми объектами осуществляется одним управляющим устройством С увеличением размерности
- 25. Особенности централизованного управления (продолжение) Достоинства централизованного управления: - быстрый обмен информацией между УО и ОУ; -
- 26. Особенности централизованного управления (продолжение) Недостатки централизованного управления: - сравнительно большое время на выработку управляющих воздействий; -
- 27. Особенности смешанного управления При смешанном управлении сочетаются централизованный и децентрализованный принципы: часть управляющих воздействий вырабатывается централизованно;
- 28. Особенности смешанного управления Достоинства и недостатки смешанного управления: - присущи в той или иной мере достоинства
- 29. Иерархическое управление
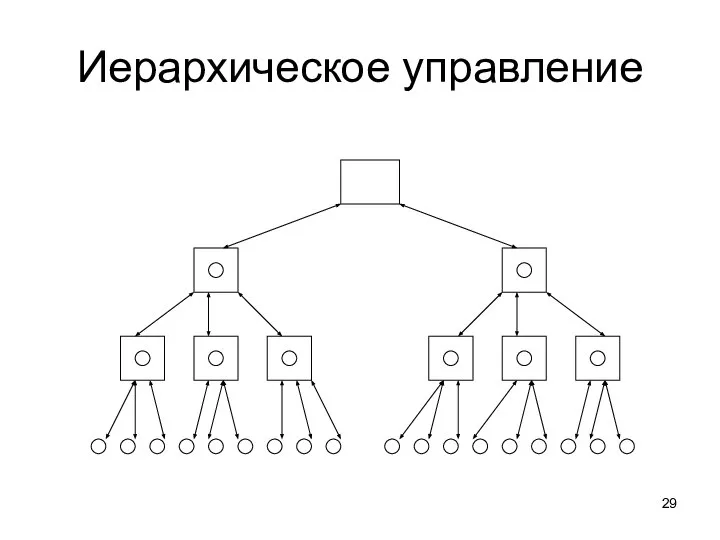
- 30. Иерархическое управление Является наиболее развитой и распространенной формой смешанного управления В системе выделяется ряд уровней, каждый
- 31. Иерархическое управление Между объектами подсистем на уровнях возможны три вида отношений: - подчинения (данный объект может
- 32. Иерархическое управление Информационные связи между объектами различных уровней – вертикальные связи Информационные связи между объектами одного
- 33. Иерархическое управление УО самого нижнего уровня получают самую подробную и конкретную информацию о состоянии ОУ По
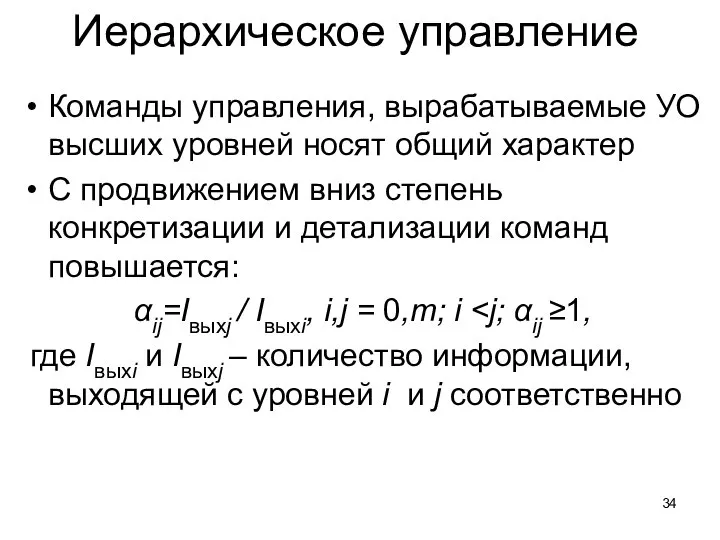
- 34. Иерархическое управление Команды управления, вырабатываемые УО высших уровней носят общий характер С продвижением вниз степень конкретизации
- 35. Основные черты иерархических систем Последовательная вертикальная соподчиненность подсистем системы Приоритет действий (право вмешательства) подсистем верхнего уровня
- 36. Признаки идеальной иерархической структуры (по М.Месаровичу) Многоуровневость (стратифицированность) Субординация внутренних связей (элементы данного уровня связаны только
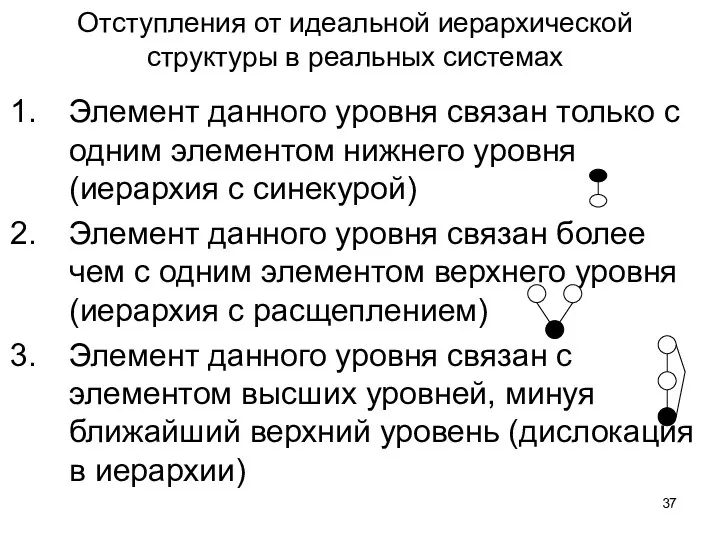
- 37. Отступления от идеальной иерархической структуры в реальных системах Элемент данного уровня связан только с одним элементом
- 38. Отступления от идеальной иерархической структуры в реальных системах (продолжение) На самом верхнем уровне имеется несколько элементов
- 39. Лекция. Системы с управлением Учебный вопрос 2. Аксиомы теории управления
- 40. Типы систем с управлением В теории управления принято считать, что системы с управлением создаются для достижения
- 41. Структурная схема системы с управлением
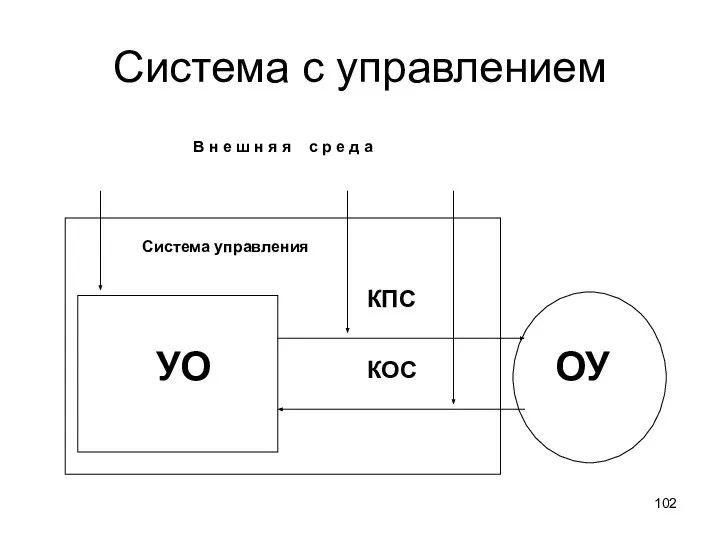
- 42. Обозначения на структурной схеме S1 – объект управления; S2 – управляющая система; N – информация о
- 43. Задачи управляющей системы (S2) целеполагание; стабилизация (поддержание заданного состояния при случайных воздействиях внешней среды); выполнение программы;
- 44. Задачи объекта управления (S1) и системы связи Задача объекта управления - реализация основной функции системы (быть
- 45. Задачи теории управления при формальном представлении системы с управлением синтез структуры и параметров объекта управления, соответствующих
- 46. Естественные условия необходимые для управления (аксиомы теории управления) Единых методов решения перечисленных задач для всех типов
- 47. Аксиомы теории управления
- 48. Аксиома 1. Наличие наблюдаемости объекта управления В теории управления объект управления считается наблюдаемым в состоянии z(t)
- 49. Аксиома 1. Наличие наблюдаемости объекта управления (продолжение) Введенное выражение y*(t) = g[t, x(t), z*(t)] означает, что:
- 50. Аксиома 1. Наличие наблюдаемости объекта управления (продолжение) Задача y*(t) = g[t, x(t), z*(t)] в теории систем
- 51. Аксиома 2. Наличие управляемости объекта управления Наличие управляемости – способности объекта управления переходить в пространстве состояний
- 52. Аксиома 3. Наличие цели управления Под целью управления понимают набор значений количественных или качественных характеристик, определяющих
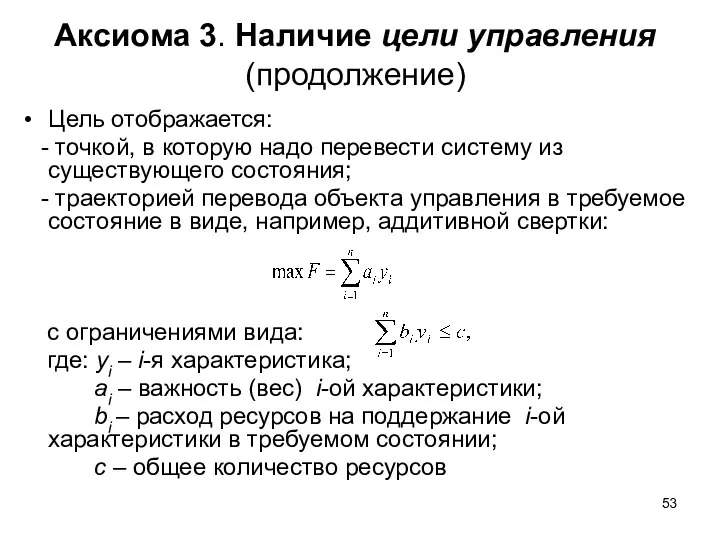
- 53. Аксиома 3. Наличие цели управления (продолжение) Цель отображается: - точкой, в которую надо перевести систему из
- 54. Аксиома 4. Свобода выбора Свобода выбора – это возможность выбора управляющих воздействий (решений) из некоторого множества
- 55. Аксиома 5. Наличие критерия эффективности управления Обобщенным критерием эффективности управления считается степень достижения цели функционирования системы
- 56. Аксиома 6. Наличие ресурсов Ресурсы могут быть: материальные; финансовые; трудовые; информационные и т.д.) Ресурсы обеспечивают реализацию
- 57. Лекция. Системы с управлением Учебный вопрос 3. Принципы и структура управления. Принцип необходимого разнообразия Эшби
- 58. Принципы построения систем с управлением Управление в системах может строиться по нескольким принципам: - децентрализованному; -
- 59. Принцип децентрализованного управления При децентрализованном управлении выработка управляющих воздействии и их реализация осуществляются отдельными подсистемами независимо
- 60. Достоинства и недостатки децентрализованного управления Достоинства: - управляющие объекты максимально приближены к управляемым, что существенно облегчает
- 61. Принцип централизованного управления Управление всеми объектами осуществляется одним управляющим объектом Управляющий объект получает информацию о состоянии
- 62. Достоинства и недостатки централизованного управления Достоинства: - возможен быстрый обмен информацией между управляющим объектом и каждым
- 63. Принцип централизованного управления (продолжение) С увеличением размерности системы сложность централизованного управления резко возрастает Приращение сложности управления
- 64. Принцип смешанного управления Предполагает построение управления на сочетании централизованного и децентрализованного принципов: - часть управляющих воздействий
- 65. Сущность иерархического управления В системе выделяется ряд уровней, каждый из которых включает одну или несколько подсистем
- 66. Сущность иерархического управления (продолжение) Отношение подчинения: - характеризуется тем, что данный объект может воздействовать на другие
- 67. Сущность иерархического управления (продолжение)
- 68. Сущность иерархического управления (продолжение) Управляющие объекты самого нижнего уровня получают самую подробную и конкретную информацию о
- 69. Сущность иерархического управления (продолжение) И наоборот, команды управления, вырабатываемые управляющими объектами на высших уровнях, носят общий
- 70. Сущность иерархического управления (продолжение) Управление в системе с иерархической структурой основано на том, что каждая из
- 71. Сущность иерархического управления (продолжение) К наиболее существенным чертам иерархических систем относятся: - последовательная вертикальная соподчиненность подсистем,
- 72. Сущность иерархического управления (продолжение) Основными характеристиками систем, построенных по иерархическому принципу, являются: - степень централизации; -
- 73. Сущность иерархического управления (продолжение) Степень централизации характеризует разделение функций управления между уровнями иерархии и определяется для
- 74. Сущность иерархического управления (продолжение) Норма управляемости характеризует объем задач управления, которые могут эффективно решаться (решаются) управляющим
- 75. Принцип необходимого разнообразия Эшби
- 76. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Из аксиом управления следует, что управление заключается в ограничении
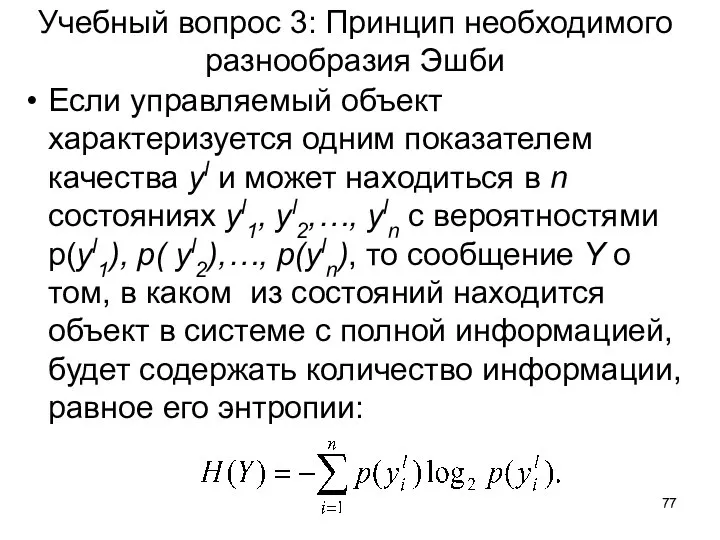
- 77. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Если управляемый объект характеризуется одним показателем качества yl и
- 78. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Для оценки состояний объекта, характеризуемого m показателями качества yj,
- 79. Учебный вопрос 3: Принцип необходимого разнообразия Эшби С получением сведений об объекте управления неопределенность его состояния
- 80. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Если полученное сообщение полностью характеризует состояние объекта, то оно
- 81. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Из теории информации также известно, что количество информации обладает
- 82. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Указанные характеристики информации позволяют провести анализ управляющих воздействий относительно
- 83. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Пусть существует система с управлением, в которой решается задача
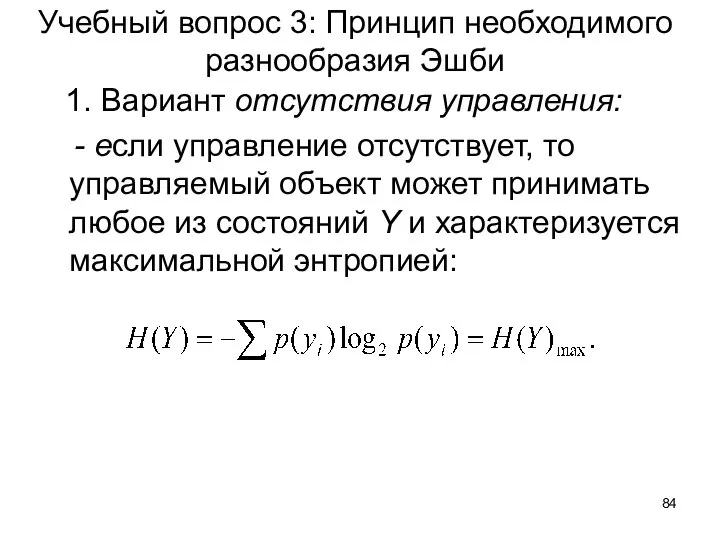
- 84. Учебный вопрос 3: Принцип необходимого разнообразия Эшби 1. Вариант отсутствия управления: - если управление отсутствует, то
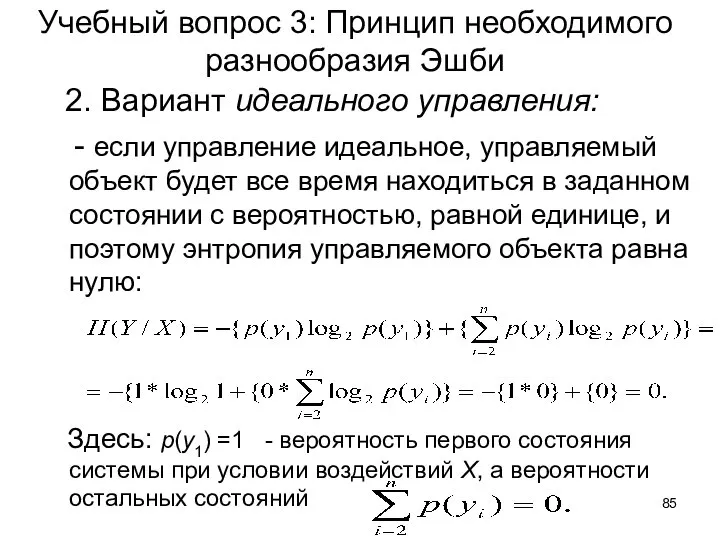
- 85. Учебный вопрос 3: Принцип необходимого разнообразия Эшби 2. Вариант идеального управления: - если управление идеальное, управляемый
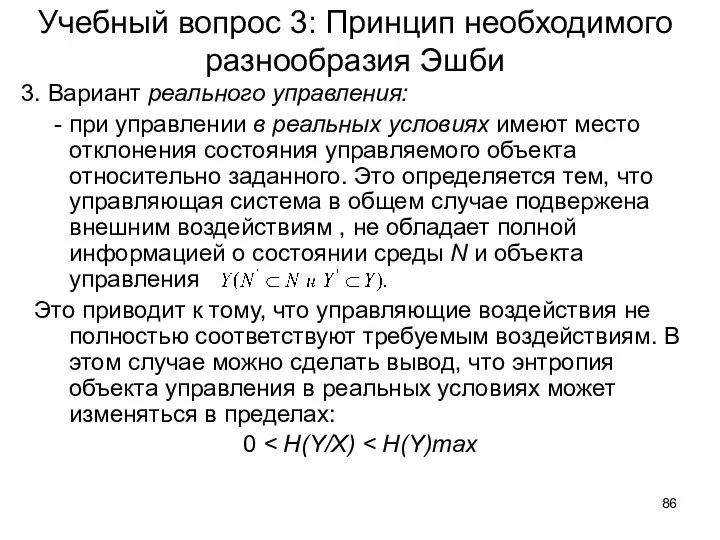
- 86. Учебный вопрос 3: Принцип необходимого разнообразия Эшби 3. Вариант реального управления: - при управлении в реальных
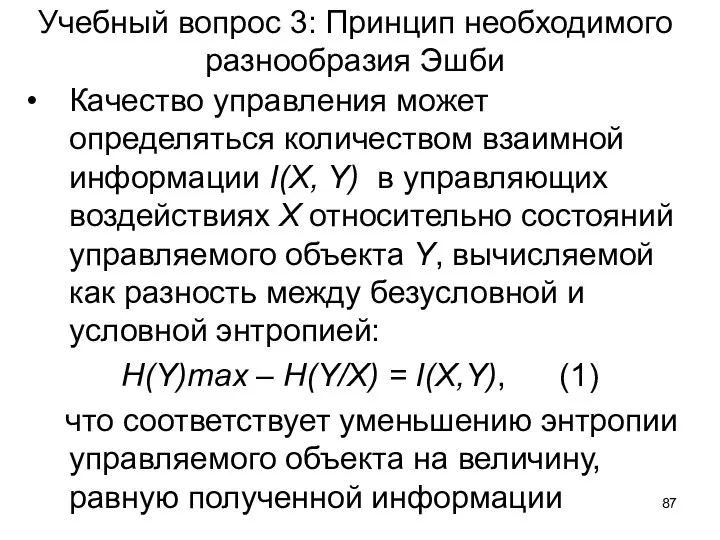
- 87. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Качество управления может определяться количеством взаимной информации I(X, Y)
- 88. Принцип необходимого разнообразия Эшби С другой стороны, количество взаимной информации I(X,Y) в управляющих воздействиях X относительно
- 89. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Подставив выражение (2) в правую часть выражения (1), получим:
- 90. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Выражение (4), определяющее предельные возможности управления, показывает, что для
- 91. Учебный вопрос 3: Принцип необходимого разнообразия Эшби Иными словами, нужно стремиться к тому, чтобы на каждое
- 92. Принцип необходимого разнообразия Эшби Выражение (4): H(Y/X) = H(Y)max – H(X) + H(X,Y) отражает фундаментальный принцип
- 93. Принцип необходимого разнообразия Эшби Согласно данному принципу: - с увеличением сложности объекта управления сложность управляющей системы
- 94. Принцип необходимого разнообразия Эшби Из этого принципа следует, что: - энтропию объекта управления (многообразие состояний регулируемых
- 95. Принцип необходимого разнообразия Эшби Принцип утверждает, что: - производительность любого физического устройства как регулятора не превышает
- 96. Принцип необходимого разнообразия Эшби Между тем, довольно часто более важны сами значения случайных отклонений, а не
- 97. Лекция. Системы с управлением Учебный вопрос 4. Функции управления и их модели. Функционирование систем с управлением
- 98. Учебный вопрос 4. Функции управления и их модели При любом способе реализации процесс управления может быть
- 99. Учебный вопрос 4. Функции управления и их модели Такими функциями могут выступать: - перспективное планирование; -
- 100. Учебный вопрос 4. Функции управления и их модели В свою очередь каждую функцию можно разделить на
- 101. Сущность процесса управления с позиций кибернетики Сбор информации о состоянии элемента системы, которым управляют, и внешней
- 102. Система с управлением
- 103. Алгоритм управления – совокупность правил, по которым информация состояния перерабатывается в командную информацию Цикл управления –
- 104. Функции управления В процессе своего функционирования система с управлением реализует функции управления. Общими функциями для систем
- 105. Функции управления Планирование состоит в том, что на основе известного состояния объекта управления и имеющихся ресурсов
- 106. Функции управления Контроль ориентирован на выявление отклонений между фактическими и плановыми значениями показателей функционирования объекта управления,
- 107. Функции управления Оперативное управление предполагает оценку выявленных при контроле отклонений и выработку корректирующих воздействий для приведения
- 109. Скачать презентацию
Слайд 2Тема 1. Основы управления в организационно-технических системах
Лекция: Системы с управлением
1.
Тема 1. Основы управления в организационно-технических системах
Лекция: Системы с управлением
1.
Слайд 3 Литература по УР,САиМ
1. Системный анализ и принятие решений: учебник. - СПб.:
Литература по УР,САиМ
1. Системный анализ и принятие решений: учебник. - СПб.:
Слайд 4Лекция: Системы с управлением
Учебный вопрос 1.
Характеристика класса систем с управлением. Построение
Лекция: Системы с управлением
Учебный вопрос 1.
Характеристика класса систем с управлением. Построение
Слайд 5Учебный вопрос 1. Характеристика класса систем с управлением
Системы, которым свойственно управление называют:
-
Учебный вопрос 1. Характеристика класса систем с управлением
Системы, которым свойственно управление называют:
-
Слайд 6Учебный вопрос 1. Характеристика класса систем с управлением
Под указанными названиями, за исключением
Учебный вопрос 1. Характеристика класса систем с управлением
Под указанными названиями, за исключением
Слайд 7Учебный вопрос 1. Характеристика класса систем с управлением
Предмет кибернетики: изучение закономерностей управления
Учебный вопрос 1. Характеристика класса систем с управлением
Предмет кибернетики: изучение закономерностей управления
Слайд 8Учебный вопрос 1. Характеристика класса систем с управлением
Управление возможно только при определенном
Учебный вопрос 1. Характеристика класса систем с управлением
Управление возможно только при определенном
Слайд 9Учебный вопрос 1. Характеристика класса систем с управлением
Черта 1. В сохранении целостности
Учебный вопрос 1. Характеристика класса систем с управлением
Черта 1. В сохранении целостности
Слайд 10Учебный вопрос 1. Характеристика класса систем с управлением
Черта 4. Системы способны переходить
Учебный вопрос 1. Характеристика класса систем с управлением
Черта 4. Системы способны переходить
Слайд 11Учебный вопрос 1. Характеристика класса систем с управлением
Рассмотрим эти черты подробнее:
Черта 1.
Учебный вопрос 1. Характеристика класса систем с управлением
Рассмотрим эти черты подробнее:
Черта 1.
Слайд 12Учебный вопрос 1. Характеристика класса систем с управлением
Ослабление или потеря информационной связи
Учебный вопрос 1. Характеристика класса систем с управлением
Ослабление или потеря информационной связи
Слайд 13Учебный вопрос 1. Характеристика класса систем с управлением
Черта 2. Информация, поступающая в
Учебный вопрос 1. Характеристика класса систем с управлением
Черта 2. Информация, поступающая в
Слайд 14Учебный вопрос 1. Характеристика класса систем с управлением
Черта 3. Каждая система имеет
Учебный вопрос 1. Характеристика класса систем с управлением
Черта 3. Каждая система имеет
Слайд 15Учебный вопрос 1. Характеристика класса систем с управлением
Черта 4. Системы способны переходить
Учебный вопрос 1. Характеристика класса систем с управлением
Черта 4. Системы способны переходить
Слайд 16Учебный вопрос 1. Характеристика класса систем с управлением
Черта 5. Существует определённое множество
Учебный вопрос 1. Характеристика класса систем с управлением
Черта 5. Существует определённое множество
Слайд 17Учебный вопрос 1. Характеристика класса систем с управлением
Черта 6. Системы являются открытыми
Воздействия
Учебный вопрос 1. Характеристика класса систем с управлением
Черта 6. Системы являются открытыми
Воздействия
Слайд 18Учебный вопрос 1. Характеристика класса систем с управлением
Перечисленные черты являются общими и
Учебный вопрос 1. Характеристика класса систем с управлением
Перечисленные черты являются общими и
Слайд 19Учебный вопрос 1. Характеристика класса систем с управлением
Закономерности управления в системах изучаются
Учебный вопрос 1. Характеристика класса систем с управлением
Закономерности управления в системах изучаются
Слайд 20Система с управлением
Система с управлением
Слайд 21Учебный вопрос 1. Построение систем с управлением
Выделяют следующие принципы управления в системах
Учебный вопрос 1. Построение систем с управлением
Выделяют следующие принципы управления в системах
Слайд 22Особенности децентрализованного управления
Выработка управляющих воздействий и их реализация при децентрализованном управлении осуществляется
Особенности децентрализованного управления
Выработка управляющих воздействий и их реализация при децентрализованном управлении осуществляется
Слайд 23Особенности децентрализованного управления
Достоинства децентрализованного управления:
- УО максимально приближены к ОУ;
-
Особенности децентрализованного управления
Достоинства децентрализованного управления:
- УО максимально приближены к ОУ;
-
Слайд 24Особенности централизованного управления
При централизованном управлении управление всеми объектами осуществляется одним управляющим устройством
С
Особенности централизованного управления
При централизованном управлении управление всеми объектами осуществляется одним управляющим устройством
С
Слайд 25Особенности централизованного управления (продолжение)
Достоинства централизованного управления:
- быстрый обмен информацией между УО
Особенности централизованного управления (продолжение)
Достоинства централизованного управления:
- быстрый обмен информацией между УО
Слайд 26Особенности централизованного управления (продолжение)
Недостатки централизованного управления:
- сравнительно большое время на выработку
Особенности централизованного управления (продолжение)
Недостатки централизованного управления:
- сравнительно большое время на выработку
Слайд 27Особенности смешанного управления
При смешанном управлении сочетаются централизованный и децентрализованный принципы:
часть управляющих
Особенности смешанного управления
При смешанном управлении сочетаются централизованный и децентрализованный принципы:
часть управляющих
Слайд 28Особенности смешанного управления
Достоинства и недостатки смешанного управления:
- присущи в той
Особенности смешанного управления
Достоинства и недостатки смешанного управления:
- присущи в той
Слайд 29Иерархическое управление
Иерархическое управление
Слайд 30Иерархическое управление
Является наиболее развитой и распространенной формой смешанного управления
В системе выделяется ряд
Иерархическое управление
Является наиболее развитой и распространенной формой смешанного управления
В системе выделяется ряд
Слайд 31Иерархическое управление
Между объектами подсистем на уровнях возможны три вида отношений:
- подчинения
Иерархическое управление
Между объектами подсистем на уровнях возможны три вида отношений:
- подчинения
Слайд 32Иерархическое управление
Информационные связи между объектами различных уровней – вертикальные связи
Информационные связи между
Иерархическое управление
Информационные связи между объектами различных уровней – вертикальные связи
Информационные связи между
Слайд 33Иерархическое управление
УО самого нижнего уровня получают самую подробную и конкретную информацию о
Иерархическое управление
УО самого нижнего уровня получают самую подробную и конкретную информацию о
Слайд 34Иерархическое управление
Команды управления, вырабатываемые УО высших уровней носят общий характер
С продвижением вниз
Иерархическое управление
Команды управления, вырабатываемые УО высших уровней носят общий характер
С продвижением вниз
Слайд 35Основные черты иерархических систем
Последовательная вертикальная соподчиненность подсистем системы
Приоритет действий (право вмешательства) подсистем
Основные черты иерархических систем
Последовательная вертикальная соподчиненность подсистем системы
Приоритет действий (право вмешательства) подсистем
Слайд 36Признаки идеальной иерархической структуры (по М.Месаровичу)
Многоуровневость (стратифицированность)
Субординация внутренних связей (элементы данного уровня
Признаки идеальной иерархической структуры (по М.Месаровичу)
Многоуровневость (стратифицированность)
Субординация внутренних связей (элементы данного уровня
Слайд 37Отступления от идеальной иерархической структуры в реальных системах
Элемент данного уровня связан только
Отступления от идеальной иерархической структуры в реальных системах
Элемент данного уровня связан только
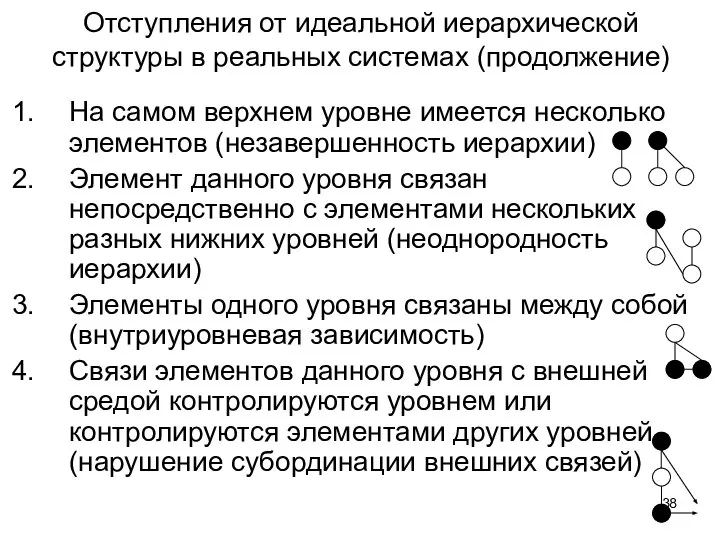
Слайд 38Отступления от идеальной иерархической структуры в реальных системах (продолжение)
На самом верхнем уровне
Отступления от идеальной иерархической структуры в реальных системах (продолжение)
На самом верхнем уровне
Слайд 39Лекция. Системы с управлением
Учебный вопрос 2.
Аксиомы теории управления
Лекция. Системы с управлением
Учебный вопрос 2.
Аксиомы теории управления
Слайд 40Типы систем с управлением
В теории управления принято считать, что системы с управлением
Типы систем с управлением
В теории управления принято считать, что системы с управлением
Слайд 41Структурная схема системы с управлением
Структурная схема системы с управлением

Слайд 42Обозначения на структурной схеме
S1 – объект управления;
S2 – управляющая система;
Обозначения на структурной схеме
S1 – объект управления;
S2 – управляющая система;
Слайд 43Задачи управляющей системы (S2)
целеполагание;
стабилизация (поддержание заданного состояния при случайных воздействиях внешней среды);
выполнение
Задачи управляющей системы (S2)
целеполагание;
стабилизация (поддержание заданного состояния при случайных воздействиях внешней среды);
выполнение
Слайд 44Задачи объекта управления (S1) и системы связи
Задача объекта управления - реализация основной
Задачи объекта управления (S1) и системы связи
Задача объекта управления - реализация основной
Слайд 45Задачи теории управления при формальном представлении системы с управлением
синтез структуры и
Задачи теории управления при формальном представлении системы с управлением
синтез структуры и
Слайд 46Естественные условия необходимые для управления (аксиомы теории управления)
Единых методов решения перечисленных задач
Естественные условия необходимые для управления (аксиомы теории управления)
Единых методов решения перечисленных задач
Слайд 47Аксиомы теории управления
Аксиомы теории управления
Слайд 48Аксиома 1.
Наличие наблюдаемости объекта управления
В теории управления объект управления считается
Аксиома 1.
Наличие наблюдаемости объекта управления
В теории управления объект управления считается
Слайд 49Аксиома 1. Наличие наблюдаемости объекта управления (продолжение)
Введенное выражение y*(t) = g[t, x(t),
Аксиома 1. Наличие наблюдаемости объекта управления (продолжение)
Введенное выражение y*(t) = g[t, x(t),
Слайд 50Аксиома 1. Наличие наблюдаемости объекта управления (продолжение)
Задача y*(t) = g[t, x(t), z*(t)]
Аксиома 1. Наличие наблюдаемости объекта управления (продолжение)
Задача y*(t) = g[t, x(t), z*(t)]
Слайд 51Аксиома 2. Наличие управляемости объекта управления
Наличие управляемости – способности объекта управления переходить
Аксиома 2. Наличие управляемости объекта управления
Наличие управляемости – способности объекта управления переходить
Слайд 52Аксиома 3. Наличие цели управления
Под целью управления понимают набор значений количественных или
Аксиома 3. Наличие цели управления
Под целью управления понимают набор значений количественных или
Слайд 53Аксиома 3. Наличие цели управления (продолжение)
Цель отображается:
- точкой, в которую надо
Аксиома 3. Наличие цели управления (продолжение)
Цель отображается:
- точкой, в которую надо
Слайд 54Аксиома 4. Свобода выбора
Свобода выбора – это возможность выбора управляющих воздействий (решений)
Аксиома 4. Свобода выбора
Свобода выбора – это возможность выбора управляющих воздействий (решений)
Слайд 55Аксиома 5. Наличие критерия эффективности управления
Обобщенным критерием эффективности управления считается степень достижения
Аксиома 5. Наличие критерия эффективности управления
Обобщенным критерием эффективности управления считается степень достижения
Слайд 56Аксиома 6. Наличие ресурсов
Ресурсы могут быть:
материальные;
финансовые;
трудовые;
информационные и
Аксиома 6. Наличие ресурсов
Ресурсы могут быть:
материальные;
финансовые;
трудовые;
информационные и
Слайд 57Лекция. Системы с управлением
Учебный вопрос 3.
Принципы и структура управления. Принцип необходимого
Лекция. Системы с управлением
Учебный вопрос 3.
Принципы и структура управления. Принцип необходимого
Слайд 58Принципы построения систем с управлением
Управление в системах может строиться по нескольким принципам:
Принципы построения систем с управлением
Управление в системах может строиться по нескольким принципам:
Слайд 59Принцип децентрализованного управления
При децентрализованном управлении выработка управляющих воздействии и их реализация осуществляются
Принцип децентрализованного управления
При децентрализованном управлении выработка управляющих воздействии и их реализация осуществляются
Слайд 60Достоинства и недостатки децентрализованного управления
Достоинства:
- управляющие объекты максимально приближены к
Достоинства и недостатки децентрализованного управления
Достоинства:
- управляющие объекты максимально приближены к
Слайд 61Принцип централизованного управления
Управление всеми объектами осуществляется одним управляющим объектом
Управляющий объект получает
Принцип централизованного управления
Управление всеми объектами осуществляется одним управляющим объектом
Управляющий объект получает
Слайд 62Достоинства и недостатки централизованного управления
Достоинства:
- возможен быстрый обмен информацией между
Достоинства и недостатки централизованного управления
Достоинства:
- возможен быстрый обмен информацией между
Слайд 63Принцип централизованного управления (продолжение)
С увеличением размерности системы сложность централизованного управления резко возрастает
Приращение
Принцип централизованного управления (продолжение)
С увеличением размерности системы сложность централизованного управления резко возрастает
Приращение
Слайд 64Принцип смешанного управления
Предполагает построение управления на сочетании централизованного и децентрализованного принципов:
Принцип смешанного управления
Предполагает построение управления на сочетании централизованного и децентрализованного принципов:
Слайд 65Сущность иерархического управления
В системе выделяется ряд уровней, каждый из которых включает одну
Сущность иерархического управления
В системе выделяется ряд уровней, каждый из которых включает одну
Слайд 66Сущность иерархического управления (продолжение)
Отношение подчинения:
- характеризуется тем, что данный объект может
Сущность иерархического управления (продолжение)
Отношение подчинения:
- характеризуется тем, что данный объект может
Слайд 67Сущность иерархического управления (продолжение)
Сущность иерархического управления (продолжение)

Слайд 68Сущность иерархического управления (продолжение)
Управляющие объекты самого нижнего уровня получают самую подробную и
Сущность иерархического управления (продолжение)
Управляющие объекты самого нижнего уровня получают самую подробную и
Слайд 69Сущность иерархического управления (продолжение)
И наоборот, команды управления, вырабатываемые управляющими объектами на высших
Сущность иерархического управления (продолжение)
И наоборот, команды управления, вырабатываемые управляющими объектами на высших
Слайд 70Сущность иерархического управления (продолжение)
Управление в системе с иерархической структурой основано на том,
Сущность иерархического управления (продолжение)
Управление в системе с иерархической структурой основано на том,
Слайд 71Сущность иерархического управления (продолжение)
К наиболее существенным чертам иерархических систем относятся:
- последовательная
Сущность иерархического управления (продолжение)
К наиболее существенным чертам иерархических систем относятся:
- последовательная
Слайд 72Сущность иерархического управления (продолжение)
Основными характеристиками систем, построенных по иерархическому принципу, являются:
Сущность иерархического управления (продолжение)
Основными характеристиками систем, построенных по иерархическому принципу, являются:
Слайд 73Сущность иерархического управления (продолжение)
Степень централизации характеризует разделение функций управления между уровнями иерархии
Сущность иерархического управления (продолжение)
Степень централизации характеризует разделение функций управления между уровнями иерархии
Слайд 74Сущность иерархического управления (продолжение)
Норма управляемости характеризует объем задач управления, которые могут эффективно
Сущность иерархического управления (продолжение)
Норма управляемости характеризует объем задач управления, которые могут эффективно
Слайд 75Принцип необходимого разнообразия Эшби
Слайд 76Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Из аксиом управления следует, что управление
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Из аксиом управления следует, что управление
Слайд 77Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Если управляемый объект характеризуется одним показателем
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Если управляемый объект характеризуется одним показателем
Слайд 78Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Для оценки состояний объекта, характеризуемого m
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Для оценки состояний объекта, характеризуемого m
Слайд 79Учебный вопрос 3: Принцип необходимого разнообразия Эшби
С получением сведений об объекте управления
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
С получением сведений об объекте управления
Слайд 80Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Если полученное сообщение полностью характеризует состояние
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Если полученное сообщение полностью характеризует состояние
Слайд 81Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Из теории информации также известно, что
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Из теории информации также известно, что
Слайд 82Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Указанные характеристики информации позволяют провести анализ
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Указанные характеристики информации позволяют провести анализ
Слайд 83Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Пусть существует система с управлением, в
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Пусть существует система с управлением, в
Слайд 84Учебный вопрос 3: Принцип необходимого разнообразия Эшби
1. Вариант отсутствия управления:
-
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
1. Вариант отсутствия управления:
-
Слайд 85Учебный вопрос 3: Принцип необходимого разнообразия Эшби
2. Вариант идеального управления:
-
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
2. Вариант идеального управления:
-
Слайд 86Учебный вопрос 3: Принцип необходимого разнообразия Эшби
3. Вариант реального управления:
- при
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
3. Вариант реального управления:
- при
Слайд 87Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Качество управления может определяться количеством взаимной
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Качество управления может определяться количеством взаимной
Слайд 88Принцип необходимого разнообразия Эшби
С другой стороны, количество взаимной информации I(X,Y) в управляющих
Принцип необходимого разнообразия Эшби
С другой стороны, количество взаимной информации I(X,Y) в управляющих
Слайд 89Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Подставив выражение (2) в правую часть
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Подставив выражение (2) в правую часть
Слайд 90Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Выражение (4), определяющее предельные возможности управления,
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Выражение (4), определяющее предельные возможности управления,
Слайд 91Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Иными словами, нужно стремиться к тому,
Учебный вопрос 3: Принцип необходимого разнообразия Эшби
Иными словами, нужно стремиться к тому,
Слайд 92Принцип необходимого разнообразия Эшби
Выражение (4):
H(Y/X) = H(Y)max – H(X) + H(X,Y)
Принцип необходимого разнообразия Эшби
Выражение (4):
H(Y/X) = H(Y)max – H(X) + H(X,Y)
Слайд 93Принцип необходимого разнообразия Эшби
Согласно данному принципу:
- с увеличением сложности объекта управления
Принцип необходимого разнообразия Эшби
Согласно данному принципу:
- с увеличением сложности объекта управления
Слайд 94Принцип необходимого разнообразия Эшби
Из этого принципа следует, что:
- энтропию объекта управления
Принцип необходимого разнообразия Эшби
Из этого принципа следует, что:
- энтропию объекта управления
Слайд 95Принцип необходимого разнообразия Эшби
Принцип утверждает, что:
- производительность любого физического устройства как
Принцип необходимого разнообразия Эшби
Принцип утверждает, что:
- производительность любого физического устройства как
Слайд 96Принцип необходимого разнообразия Эшби
Между тем, довольно часто более важны сами значения случайных
Принцип необходимого разнообразия Эшби
Между тем, довольно часто более важны сами значения случайных
Слайд 97Лекция. Системы с управлением
Учебный вопрос 4.
Функции управления и их модели. Функционирование
Лекция. Системы с управлением
Учебный вопрос 4.
Функции управления и их модели. Функционирование
Слайд 98Учебный вопрос 4. Функции управления и их модели
При любом способе реализации процесс
Учебный вопрос 4. Функции управления и их модели
При любом способе реализации процесс
Слайд 99Учебный вопрос 4. Функции управления и их модели
Такими функциями могут выступать:
-
Учебный вопрос 4. Функции управления и их модели
Такими функциями могут выступать:
-
Слайд 100Учебный вопрос 4. Функции управления и их модели
В свою очередь каждую функцию
Учебный вопрос 4. Функции управления и их модели
В свою очередь каждую функцию
Слайд 101Сущность процесса управления с позиций кибернетики
Сбор информации о состоянии элемента системы,
Сущность процесса управления с позиций кибернетики
Сбор информации о состоянии элемента системы,
Слайд 102Система с управлением
Система с управлением
Слайд 103Алгоритм управления – совокупность правил, по которым информация состояния перерабатывается в командную
Алгоритм управления – совокупность правил, по которым информация состояния перерабатывается в командную
Слайд 104Функции управления
В процессе своего функционирования система с управлением реализует функции управления.
Общими
Функции управления
В процессе своего функционирования система с управлением реализует функции управления.
Общими
Слайд 105Функции управления
Планирование состоит в том, что на основе известного состояния объекта управления
Функции управления
Планирование состоит в том, что на основе известного состояния объекта управления
Слайд 106Функции управления
Контроль ориентирован на выявление отклонений между фактическими и плановыми значениями показателей
Функции управления
Контроль ориентирован на выявление отклонений между фактическими и плановыми значениями показателей
Слайд 107Функции управления
Оперативное управление предполагает оценку выявленных при контроле отклонений и выработку корректирующих
Функции управления
Оперативное управление предполагает оценку выявленных при контроле отклонений и выработку корректирующих
 Методические особенности физической подготовки футболистов
Методические особенности физической подготовки футболистов Применение ИКТ на уроках математики и физики
Применение ИКТ на уроках математики и физики Организация перевозок, движения и эксплуатация транспорта
Организация перевозок, движения и эксплуатация транспорта Формула корней квадратного уравнения
Формула корней квадратного уравнения Будьте осторожны на дорогах
Будьте осторожны на дорогах Технология распознавания движения Move assistant
Технология распознавания движения Move assistant Клиники, дружественные к подросткам и молодежи, или Куда пойти подростку?
Клиники, дружественные к подросткам и молодежи, или Куда пойти подростку? Директора школы
Директора школы Что делать при пожаре
Что делать при пожаре ТЕМА № 2 (ХПИ)
ТЕМА № 2 (ХПИ) Влияние дождевых червей на образование почвы
Влияние дождевых червей на образование почвы СОВМЕСТИМОСТЬС ПОИСКОВИКАМИ
СОВМЕСТИМОСТЬС ПОИСКОВИКАМИ Индивидуальный проект как новый курс учебного плана в соответствии с требованиями ФГОС среднего общего образования
Индивидуальный проект как новый курс учебного плана в соответствии с требованиями ФГОС среднего общего образования КАК СДАТЬ ЕГЭ ?!
КАК СДАТЬ ЕГЭ ?! ПРЕИМУЩЕСТВА ТРЦ ТАМАША Рекламная поддержка бизнеса арендаторов Индивидуальный гибкий подход к арендаторам Вместительный парки
ПРЕИМУЩЕСТВА ТРЦ ТАМАША Рекламная поддержка бизнеса арендаторов Индивидуальный гибкий подход к арендаторам Вместительный парки Конкурс костюмов #МойБелыйДом
Конкурс костюмов #МойБелыйДом ТИМОЩЕНКО АРТЕМ ВЛАДИМИРОВИЧ
ТИМОЩЕНКО АРТЕМ ВЛАДИМИРОВИЧ 8e005e7ae02c8614c6f2a9791c3dc4ed3f60a486-1663392922073
8e005e7ae02c8614c6f2a9791c3dc4ed3f60a486-1663392922073 Состояние, перспективы развития и политика создания единого информационного пространства ОАО «Автомобильный завод «УРАЛ»
Состояние, перспективы развития и политика создания единого информационного пространства ОАО «Автомобильный завод «УРАЛ» Декоративно-прикладное искусство и человек
Декоративно-прикладное искусство и человек Внутренняя работа ПК. Для начинающих
Внутренняя работа ПК. Для начинающих Татьяна Ларина - любимая героиня Пушкина
Татьяна Ларина - любимая героиня Пушкина Фирменный стиль
Фирменный стиль Автор: учитель биологии Егоров Сергей Владимирович (Еласовская средняя общеобразовательная школа Горномарийского района республ
Автор: учитель биологии Егоров Сергей Владимирович (Еласовская средняя общеобразовательная школа Горномарийского района республ УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ (II)
УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ (II) Альбинизм
Альбинизм Презентация на тему Показатели экономического роста
Презентация на тему Показатели экономического роста 9 Б класс
9 Б класс