Применение генетических алгоритмов для генерации автоматов при построении модели максимального правдоподобия и в задачах управл
- Применение генетических алгоритмов для генерации автоматов при построении модели максимального правдоподобия и в задачах управл

Содержание
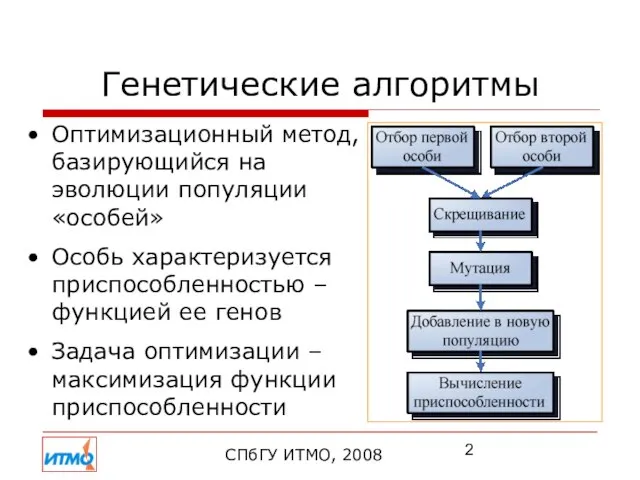
- 2. Генетические алгоритмы Оптимизационный метод, базирующийся на эволюции популяции «особей» Особь характеризуется приспособленностью – функцией ее генов
- 3. Генетические алгоритмы и автоматы Теория игр (итерированная дилемма узника) Молекулярная биология (выбор праймера для ПЦР) Роботехника
- 4. В работе генетические алгоритмы и автоматы применяются для: Построения моделей максимального правдоподобия одного класса. Задача: поиск
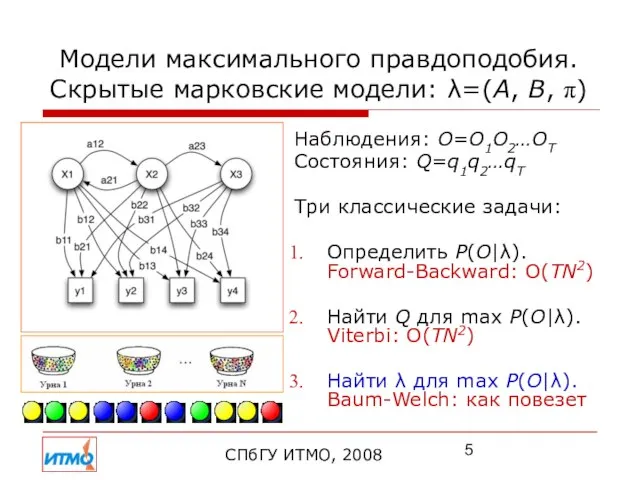
- 5. Модели максимального правдоподобия. Скрытые марковские модели: λ=(A, B, π) Наблюдения: O=O1O2…OT Состояния: Q=q1q2…qT Три классические задачи:
- 6. Недостатки алгоритма Баума-Велша СПбГУ ИТМО, 2008 Успешно применяется для решения актуальных задач – распознавание речи, предсказание
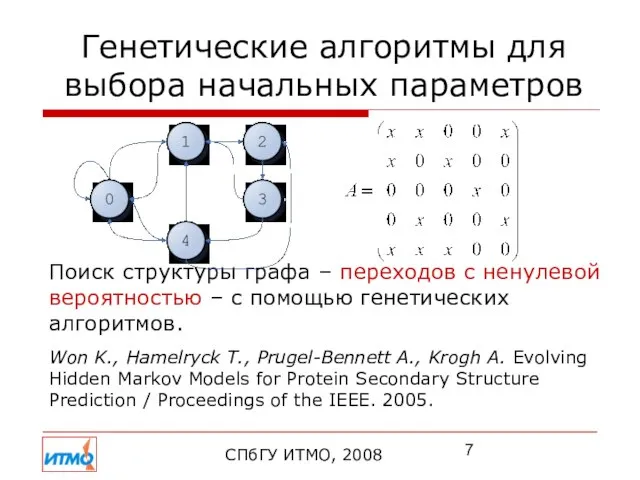
- 7. Поиск структуры графа – переходов с ненулевой вероятностью – с помощью генетических алгоритмов. Won K., Hamelryck
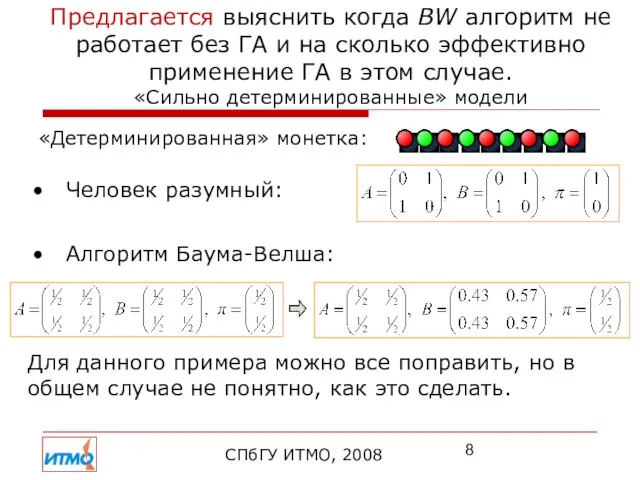
- 8. Предлагается выяснить когда BW алгоритм не работает без ГА и на сколько эффективно применение ГА в
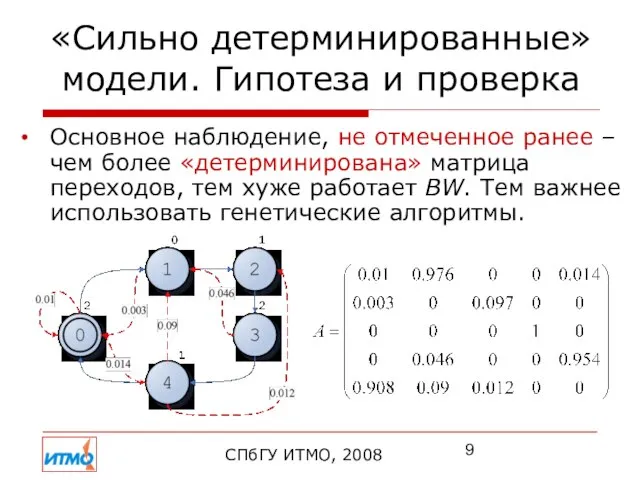
- 9. «Сильно детерминированные» модели. Гипотеза и проверка СПбГУ ИТМО, 2008 Основное наблюдение, не отмеченное ранее – чем
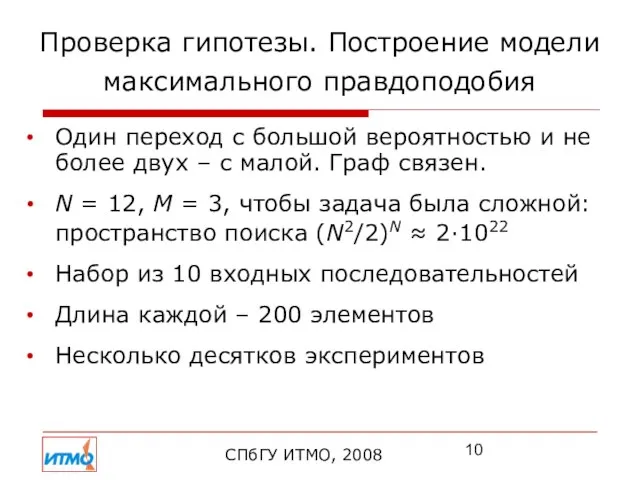
- 10. Проверка гипотезы. Построение модели максимального правдоподобия СПбГУ ИТМО, 2008 Один переход с большой вероятностью и не
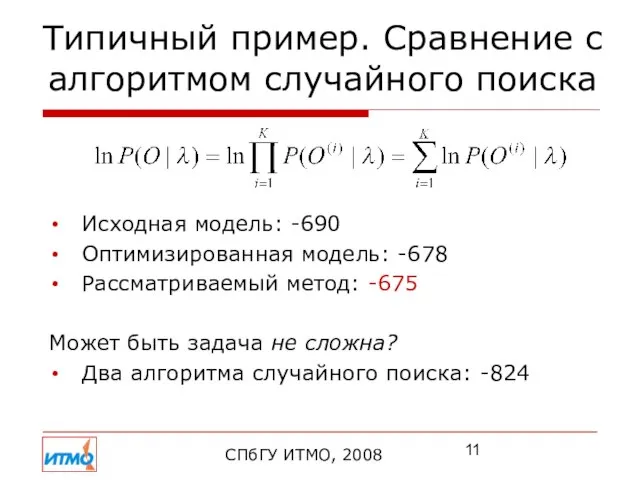
- 11. Типичный пример. Сравнение с алгоритмом случайного поиска СПбГУ ИТМО, 2008 Исходная модель: -690 Оптимизированная модель: -678
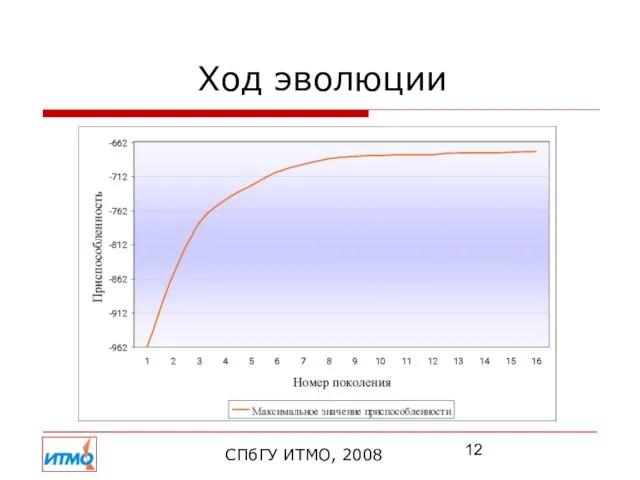
- 12. Ход эволюции СПбГУ ИТМО, 2008
- 13. Есть ли практическая польза? Поиск ошибок в автоматах с помощью скрытых марковских моделей Методы: Верификация Тестирование
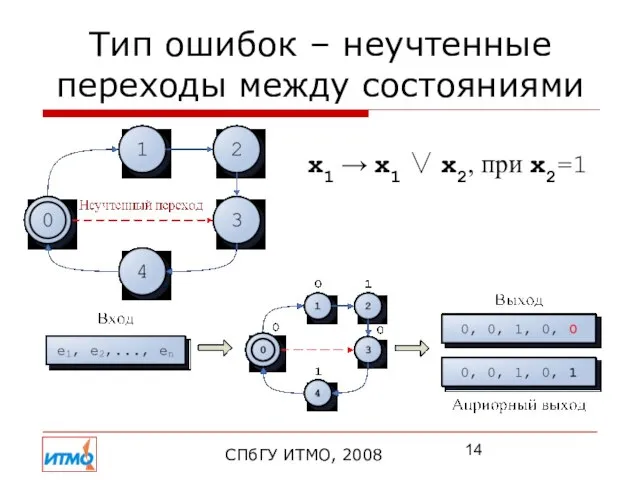
- 14. Тип ошибок – неучтенные переходы между состояниями x1 → x1 ∨ x2, при x2=1 СПбГУ ИТМО,
- 15. Результаты по первой части Эмпирически установлена неприменимость BW алгоритма при построении моделей максимального правдоподобия некоторого класса
- 16. Решение нетривиальных задач управления. Примеры и актуальность. Беспилотным летательным аппаратом Наземным средством передвижения Различными системами этих
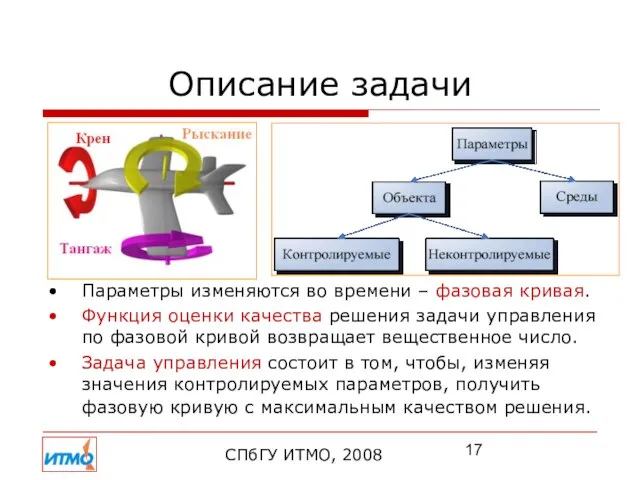
- 17. Описание задачи СПбГУ ИТМО, 2008 Параметры изменяются во времени – фазовая кривая. Функция оценки качества решения
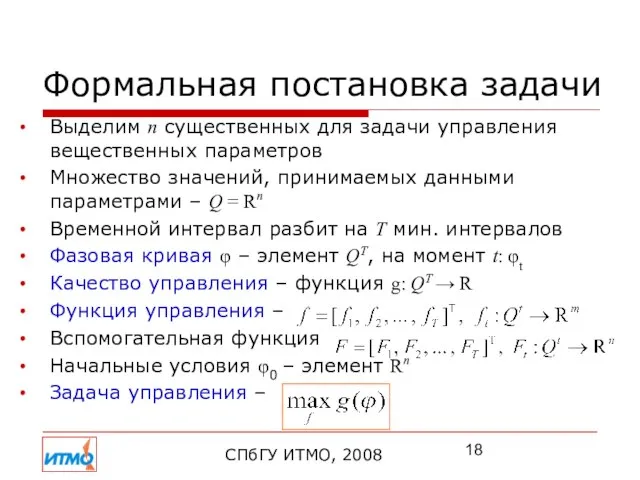
- 18. Формальная постановка задачи СПбГУ ИТМО, 2008 Выделим n существенных для задачи управления вещественных параметров Множество значений,
- 19. Проблемы, возникающие при решении задачи СПбГУ ИТМО, 2008 Зависимости между параметрами сложны. Задаются функцией h в
- 20. Автоматный подход СПбГУ ИТМО, 2008 При решении задачи управления часто можно выделить состояния, в которых может
- 21. Недостатки автоматного подхода СПбГУ ИТМО, 2008 Задача эвристического определения конечного множества воздействий трудна Сложность эвристического выбора
- 22. Предлагаемый метод. Основная идея – применение ГА для автоматического построения автомата СПбГУ ИТМО, 2008 Метод –
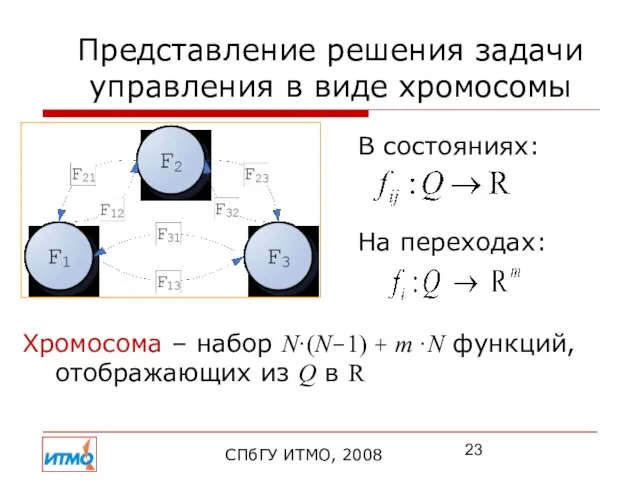
- 23. Представление решения задачи управления в виде хромосомы СПбГУ ИТМО, 2008 В состояниях: Хромосома – набор N·(N-1)
- 24. Построение функции, отображающей из Rn в R СПбГУ ИТМО, 2008 Функция – композиция базовых функции Набор
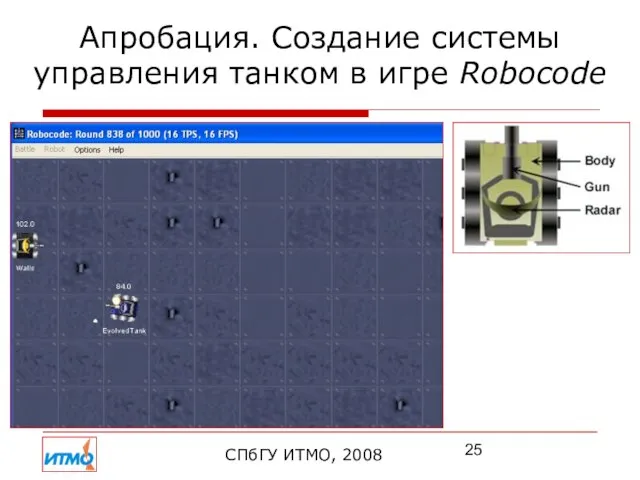
- 25. Апробация. Создание системы управления танком в игре Robocode СПбГУ ИТМО, 2008
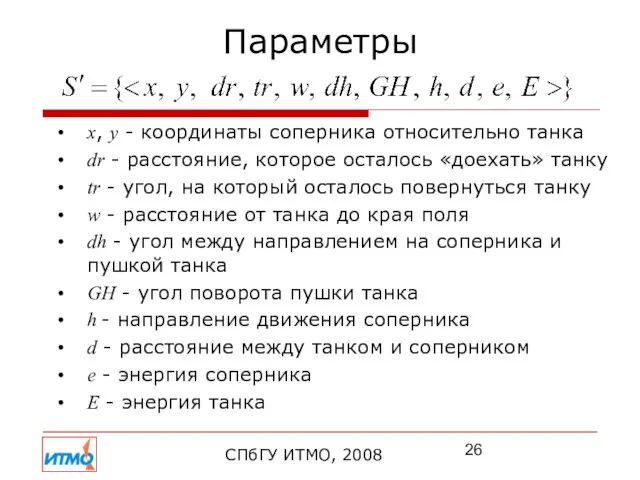
- 26. Параметры СПбГУ ИТМО, 2008 x, y - координаты соперника относительно танка dr - расстояние, которое осталось
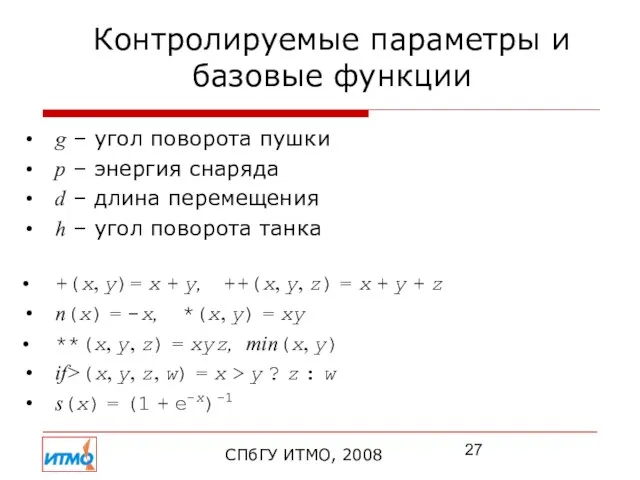
- 27. Контролируемые параметры и базовые функции СПбГУ ИТМО, 2008 g – угол поворота пушки p – энергия
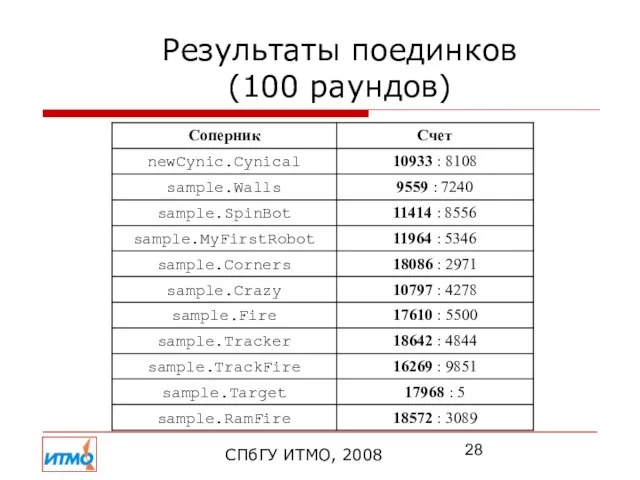
- 28. Результаты поединков (100 раундов) СПбГУ ИТМО, 2008
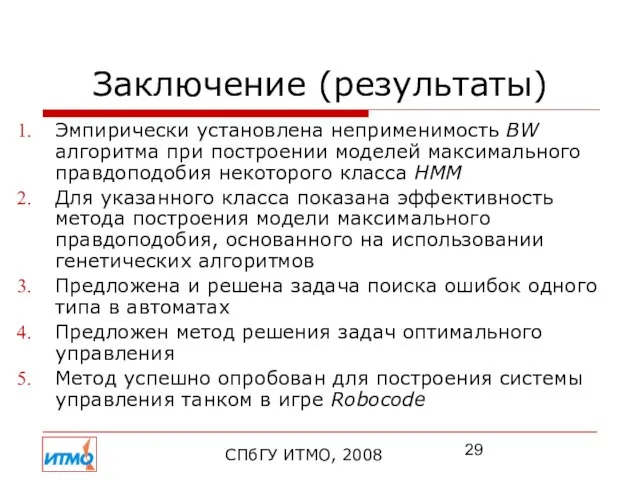
- 29. Заключение (результаты) Эмпирически установлена неприменимость BW алгоритма при построении моделей максимального правдоподобия некоторого класса HMM Для
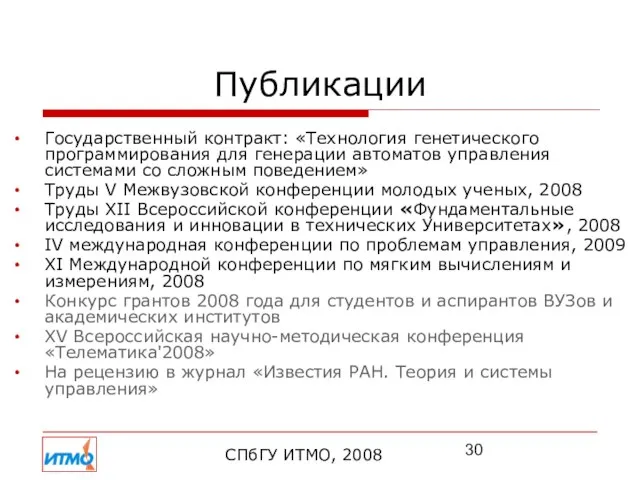
- 30. Публикации Государственный контракт: «Технология генетического программирования для генерации автоматов управления системами со сложным поведением» Труды V
- 32. Скачать презентацию
Слайд 2Генетические алгоритмы
Оптимизационный метод, базирующийся на эволюции популяции «особей»
Особь характеризуется приспособленностью – функцией
Генетические алгоритмы
Оптимизационный метод, базирующийся на эволюции популяции «особей»
Особь характеризуется приспособленностью – функцией
Слайд 3Генетические алгоритмы и автоматы
Теория игр (итерированная дилемма узника)
Молекулярная биология (выбор праймера
Генетические алгоритмы и автоматы
Теория игр (итерированная дилемма узника)
Молекулярная биология (выбор праймера
Слайд 4В работе генетические алгоритмы и автоматы применяются для:
Построения моделей максимального правдоподобия одного
В работе генетические алгоритмы и автоматы применяются для:
Построения моделей максимального правдоподобия одного
Слайд 5Модели максимального правдоподобия. Скрытые марковские модели: λ=(A, B, π)
Наблюдения: O=O1O2…OT
Состояния: Q=q1q2…qT
Три классические
Модели максимального правдоподобия. Скрытые марковские модели: λ=(A, B, π)
Наблюдения: O=O1O2…OT
Состояния: Q=q1q2…qT
Три классические
Слайд 6Недостатки алгоритма
Баума-Велша
СПбГУ ИТМО, 2008
Успешно применяется для решения актуальных задач –
Недостатки алгоритма
Баума-Велша
СПбГУ ИТМО, 2008
Успешно применяется для решения актуальных задач –
Слайд 7Поиск структуры графа – переходов с ненулевой вероятностью – с помощью генетических
Поиск структуры графа – переходов с ненулевой вероятностью – с помощью генетических
Слайд 8Предлагается выяснить когда BW алгоритм не работает без ГА и на сколько
Предлагается выяснить когда BW алгоритм не работает без ГА и на сколько
Слайд 9«Сильно детерминированные» модели. Гипотеза и проверка
СПбГУ ИТМО, 2008
Основное наблюдение, не отмеченное
«Сильно детерминированные» модели. Гипотеза и проверка
СПбГУ ИТМО, 2008
Основное наблюдение, не отмеченное
Слайд 10Проверка гипотезы. Построение модели максимального правдоподобия
СПбГУ ИТМО, 2008
Один переход с большой
Проверка гипотезы. Построение модели максимального правдоподобия
СПбГУ ИТМО, 2008
Один переход с большой
Слайд 11Типичный пример. Сравнение с алгоритмом случайного поиска
СПбГУ ИТМО, 2008
Исходная модель: -690
Оптимизированная
Типичный пример. Сравнение с алгоритмом случайного поиска
СПбГУ ИТМО, 2008
Исходная модель: -690
Оптимизированная
Слайд 12Ход эволюции
СПбГУ ИТМО, 2008
Ход эволюции
СПбГУ ИТМО, 2008
Слайд 13Есть ли практическая польза?
Поиск ошибок в автоматах с помощью скрытых марковских
Есть ли практическая польза? Поиск ошибок в автоматах с помощью скрытых марковских
Слайд 14Тип ошибок – неучтенные переходы между состояниями
x1 → x1 ∨ x2, при
Тип ошибок – неучтенные переходы между состояниями
x1 → x1 ∨ x2, при
Слайд 15Результаты по первой части
Эмпирически установлена неприменимость BW алгоритма при построении моделей максимального
Результаты по первой части
Эмпирически установлена неприменимость BW алгоритма при построении моделей максимального
Слайд 16Решение нетривиальных задач управления. Примеры и актуальность.
Беспилотным летательным аппаратом
Наземным средством передвижения
Различными
Решение нетривиальных задач управления. Примеры и актуальность.
Беспилотным летательным аппаратом
Наземным средством передвижения
Различными
Слайд 17Описание задачи
СПбГУ ИТМО, 2008
Параметры изменяются во времени – фазовая кривая.
Функция оценки качества
Описание задачи
СПбГУ ИТМО, 2008
Параметры изменяются во времени – фазовая кривая.
Функция оценки качества
Слайд 18Формальная постановка задачи
СПбГУ ИТМО, 2008
Выделим n существенных для задачи управления вещественных параметров
Множество
Формальная постановка задачи
СПбГУ ИТМО, 2008
Выделим n существенных для задачи управления вещественных параметров
Множество
Слайд 19Проблемы, возникающие при решении задачи
СПбГУ ИТМО, 2008
Зависимости между параметрами сложны. Задаются функцией
Проблемы, возникающие при решении задачи
СПбГУ ИТМО, 2008
Зависимости между параметрами сложны. Задаются функцией
Слайд 20Автоматный подход
СПбГУ ИТМО, 2008
При решении задачи управления часто можно выделить состояния, в
Автоматный подход
СПбГУ ИТМО, 2008
При решении задачи управления часто можно выделить состояния, в
Слайд 21Недостатки автоматного подхода
СПбГУ ИТМО, 2008
Задача эвристического определения конечного множества воздействий трудна
Сложность
Недостатки автоматного подхода
СПбГУ ИТМО, 2008
Задача эвристического определения конечного множества воздействий трудна
Сложность
Слайд 22Предлагаемый метод. Основная идея – применение ГА для автоматического построения автомата
СПбГУ ИТМО,
Предлагаемый метод. Основная идея – применение ГА для автоматического построения автомата
СПбГУ ИТМО,
Слайд 23Представление решения задачи управления в виде хромосомы
СПбГУ ИТМО, 2008
В состояниях:
Хромосома –
Представление решения задачи управления в виде хромосомы
СПбГУ ИТМО, 2008
В состояниях:
Хромосома –
Слайд 24Построение функции, отображающей из Rn в R
СПбГУ ИТМО, 2008
Функция – композиция базовых
Построение функции, отображающей из Rn в R
СПбГУ ИТМО, 2008
Функция – композиция базовых

Слайд 25Апробация. Создание системы управления танком в игре Robocode
СПбГУ ИТМО, 2008
Апробация. Создание системы управления танком в игре Robocode
СПбГУ ИТМО, 2008
Слайд 26Параметры
СПбГУ ИТМО, 2008
x, y - координаты соперника относительно танка
dr - расстояние, которое
Параметры
СПбГУ ИТМО, 2008
x, y - координаты соперника относительно танка
dr - расстояние, которое
Слайд 27
Контролируемые параметры и базовые функции
СПбГУ ИТМО, 2008
g – угол поворота пушки
p –
Контролируемые параметры и базовые функции
СПбГУ ИТМО, 2008
g – угол поворота пушки
p –
Слайд 28Результаты поединков
(100 раундов)
СПбГУ ИТМО, 2008
Результаты поединков
(100 раундов)
СПбГУ ИТМО, 2008
Слайд 29Заключение (результаты)
Эмпирически установлена неприменимость BW алгоритма при построении моделей максимального правдоподобия некоторого
Заключение (результаты)
Эмпирически установлена неприменимость BW алгоритма при построении моделей максимального правдоподобия некоторого
Слайд 30Публикации
Государственный контракт: «Технология генетического программирования для генерации автоматов управления системами со сложным
Публикации
Государственный контракт: «Технология генетического программирования для генерации автоматов управления системами со сложным
 О подготовке общеобразовательных учреждений к началу 2012–2013 учебного года
О подготовке общеобразовательных учреждений к началу 2012–2013 учебного года Молодёжные субкультуры
Молодёжные субкультуры Презентация на тему Непосредственная образовательная деятельность в ДОУ
Презентация на тему Непосредственная образовательная деятельность в ДОУ Буквы К, к, обозначающие согласные звуки [к], [к`]
Буквы К, к, обозначающие согласные звуки [к], [к`] Построение разреза по зданию
Построение разреза по зданию Презентация на тему БАСНЯ КАК ЭПИЧЕСКИЙ ЖАНР
Презентация на тему БАСНЯ КАК ЭПИЧЕСКИЙ ЖАНР перевод чисел в двоичную систему счисления
перевод чисел в двоичную систему счисления Презентация на тему Виды движения Земли
Презентация на тему Виды движения Земли Juno and Avos
Juno and Avos Презентация на тему Гигиена кожи рук. Болезни грязных рук
Презентация на тему Гигиена кожи рук. Болезни грязных рук Презентация интерактивного мультимедийного пособия «Визуальная энциклопедия»
Презентация интерактивного мультимедийного пособия «Визуальная энциклопедия» Необыкновенные уголки Земли. Фото
Необыкновенные уголки Земли. Фото От кареты до ракеты
От кареты до ракеты Инвестиционная политика на транспорте
Инвестиционная политика на транспорте Таять может, Да не лед. Не фонарь, А свет дает.
Таять может, Да не лед. Не фонарь, А свет дает. История денежных знаков России
История денежных знаков России Выращивание авокадо в домашних условиях
Выращивание авокадо в домашних условиях Потенциальные возможности размножения организмов
Потенциальные возможности размножения организмов Основные показатели надежности систем внутридомового электроснабжения. Тема 1
Основные показатели надежности систем внутридомового электроснабжения. Тема 1 Описание и технически параметри на компютърна система
Описание и технически параметри на компютърна система Правила безопасности в кабинете информатики
Правила безопасности в кабинете информатики Брендинг бара Bells
Брендинг бара Bells Криптовалюта. Биткойн
Криптовалюта. Биткойн Культура Древней Руси 9 века
Культура Древней Руси 9 века Марко Жераси (Marco Geraci) Эксперт Совета по пенсионной реформе при Правительстве Франции
Марко Жераси (Marco Geraci) Эксперт Совета по пенсионной реформе при Правительстве Франции Происхождение и развитие человека
Происхождение и развитие человека Школа позиционирования. Стратегический менеджмент
Школа позиционирования. Стратегический менеджмент 1299268
1299268