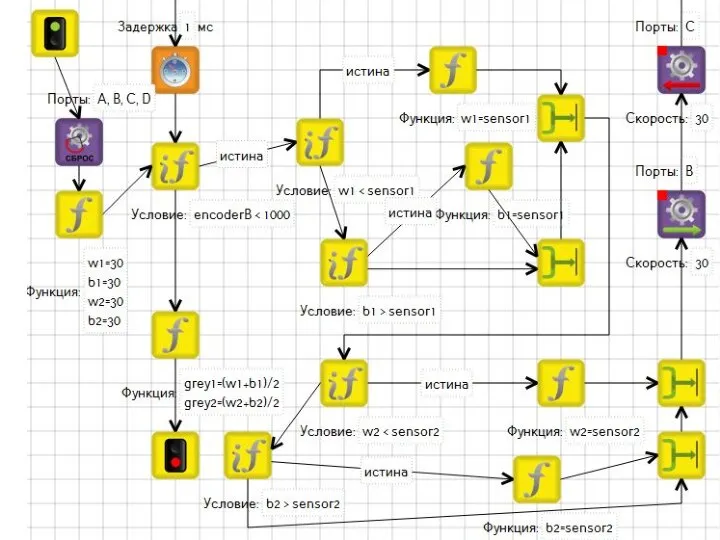
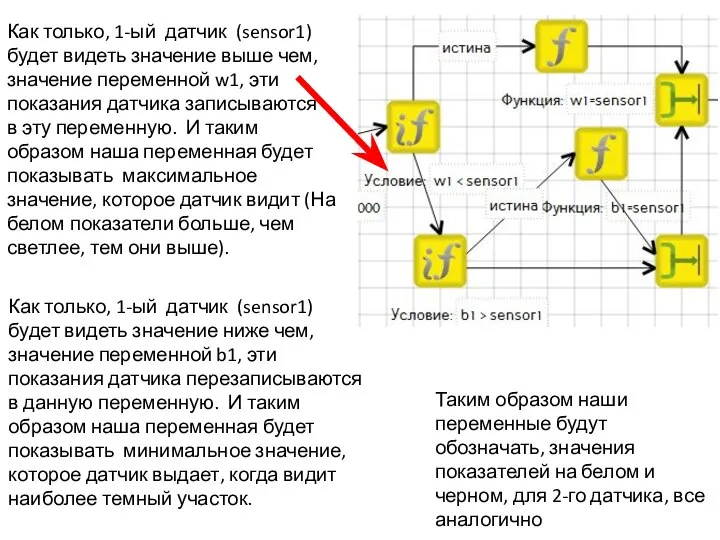
w1, эти показания датчика записываются в эту переменную. И таким образом наша переменная будет показывать максимальное значение, которое датчик видит (На белом показатели больше, чем светлее, тем они выше).
Как только, 1-ый датчик (sensor1) будет видеть значение ниже чем, значение переменной b1, эти показания датчика перезаписываются в данную переменную. И таким образом наша переменная будет показывать минимальное значение, которое датчик выдает, когда видит наиболее темный участок.
Таким образом наши переменные будут обозначать, значения показателей на белом и черном, для 2-го датчика, все аналогично

 Красота в гармонии
Красота в гармонии Обучение детей плаванию от 3 до 5 лет
Обучение детей плаванию от 3 до 5 лет Смена парадигмы мышления
Смена парадигмы мышления Present Simple (Вопросительные предложения)
Present Simple (Вопросительные предложения)  Политическое развитие СССР в послевоенные годы (1945-1953гг.) «Апогей сталинизма»
Политическое развитие СССР в послевоенные годы (1945-1953гг.) «Апогей сталинизма» Автоматизированная поддержка пользовательской документацииWeb-приложений, разрабатываемых в среде WebRatio
Автоматизированная поддержка пользовательской документацииWeb-приложений, разрабатываемых в среде WebRatio Housing
Housing Русские поэты о Родине и родной природе
Русские поэты о Родине и родной природе Сопровождение выполнения проектов Программы научно-технического сотрудничества 2008-2010 гг.
Сопровождение выполнения проектов Программы научно-технического сотрудничества 2008-2010 гг. Основы управления в организационно-технических системах
Основы управления в организационно-технических системах Тема урока:
Тема урока: Наркомании и токсикомании
Наркомании и токсикомании Модернизация вагона-хоппера
Модернизация вагона-хоппера Воздушная перспектива
Воздушная перспектива Подарки на праздники со склада в Москве
Подарки на праздники со склада в Москве Трудові спори
Трудові спори ОСОБЕННОСТИ СТРОЕНИЯ
ОСОБЕННОСТИ СТРОЕНИЯ  Проект 11 класс
Проект 11 класс Корінь. Спільнокореневі слова
Корінь. Спільнокореневі слова Открытый урок по русскому языку во втором классе
Открытый урок по русскому языку во втором классе Виртуальная школа
Виртуальная школа Выполненное и планируемое благоустройство
Выполненное и планируемое благоустройство Творческий проект Лопатка кухонная
Творческий проект Лопатка кухонная Демократия. Формы демократии
Демократия. Формы демократии Изучение языка художественных произведений на уроках русского языка и литературы
Изучение языка художественных произведений на уроках русского языка и литературы Религиозно-культурные реалии в оригинале и переводе
Религиозно-культурные реалии в оригинале и переводе Презентация на тему А. Митта «Шар в окошке» 2 класс
Презентация на тему А. Митта «Шар в окошке» 2 класс  Введение, общие сведения. Определение понятия электропривод
Введение, общие сведения. Определение понятия электропривод