Щербак С.Г., Макаренко С.В., Коваленко А.П., Сарана А.М., Бережкова Н.И. Докладчик Станислав Вячеславович Макаренко
- Щербак С.Г., Макаренко С.В., Коваленко А.П., Сарана А.М., Бережкова Н.И. Докладчик Станислав Вячеславович Макаренко

Содержание
- 2. Ключевая проблема реабилитации Проблема восстановления передвижения и самообеспечения – ключевая в реабилитации больных
- 3. Организационные системные ПРОБЛЕМЫ обеспечения реабилитационного процесса 1. Осуществление интенсивной двигательной терапии требует длительного участия значительного количества
- 4. Роль роботов При неаппаратной реабилитации для занятий ходьбой один больной требует участие трех и более медицинских
- 5. Роль роботов Ассистирующий робот позволяет проводить сеансы реабилитации: с точно дозированной весовой и скоростной нагрузками, по
- 6. Роль роботов Главное же преимущество робот-ассистированной реабилитации – это возможность проведения тренировок на субмаксимальном уровне как
- 7. Роботизированная терапия на комплексе LOKOMAT PRO отвечает вышеописанным требованиям и дает возможность проведения интенсивной локомоторной терапии
- 8. На сегодняшний день в России 30 аппаратов системы LOKOMAT В России первые системы LOKOMAT были инсталированны
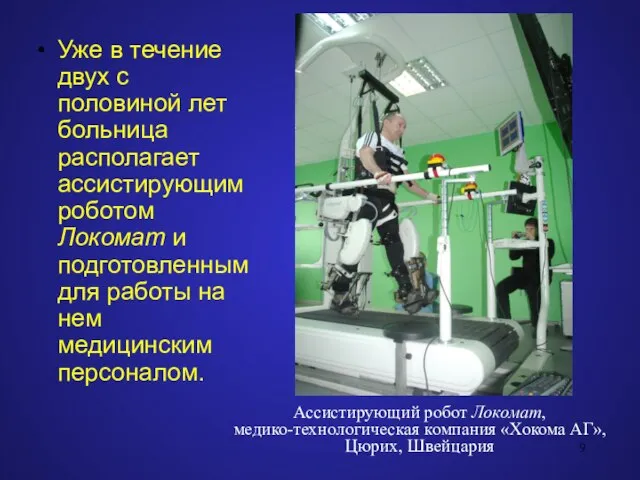
- 9. Ассистирующий робот Локомат, медико-технологическая компания «Хокома АГ», Цюрих, Швейцария Уже в течение двух с половиной лет
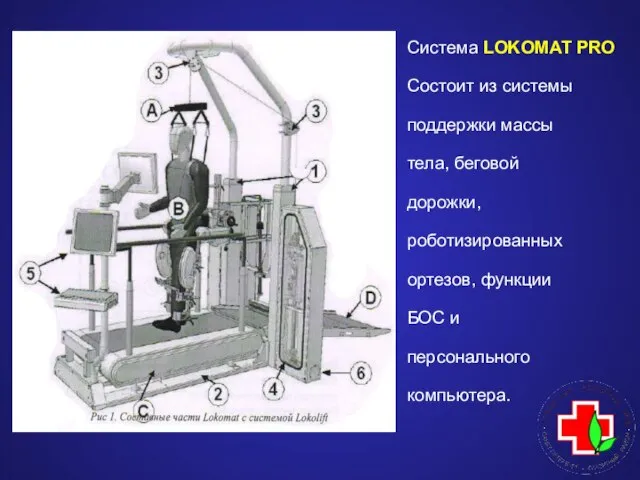
- 10. Система LOKOMAT PRO Состоит из системы поддержки массы тела, беговой дорожки, роботизированных ортезов, функции БОС и
- 11. Метаанализ применения робот-ассистированной реабилитации при заболеваниях и травмах центральной нервной системы, исследовательская группа Брюссельского университета, Бельгия,
- 12. Т.о., робот-ассистированная реабилитация больных с повреждением функции ходьбы с точки зрения строгих критериев современной доказательной медицины
- 13. анализ представляемых в литературе материалов показывает, как правило, низкое число наблюдений, ограничивающееся двузначными числами. Имеются данные,
- 14. Нейропластичность – способность нервной системы изменять свою морфо-функциональную структуру для восстановления утраченных функций. Концепция нейропластичности предполагает
- 15. Целью настоящего исследования является анализ целесообразности применения робот-ассистирующей реабилитации и функции движения у больных с центральными
- 16. Дизайн данного клинического испытания: интервенционный, лечебный, рандомизированный, частично слепой, с активным контролем, параллельный,
- 17. Структура курса интервенций se Во всех трех группах каждый испытуемый получает: 36 сеансов двигательных тренировок, по
- 18. Структура интервенционной сессии на Локомате. Размещение испытуемого в аппарате: 5–10 мин, Разминка: 5–10 мин, Основная часть
- 19. Первичные конечные точки. 1. тест ходьбы в течение 1 минуты, 2. тест ходьбы на 10 м.
- 20. Вторичные конечные точки - тест «Индекс удовлетворенности жизнью А» Предложен сотрудниками Чикагского университета Бернис Нойгартен, Робертом
- 21. График тестирования По всем конечным точкам тестирование проводится 4 раза: После включения в число испытуемых перед
- 22. Материалы и методы ЧМТ– 18 пациентов Острое нарушение мозгового кровообращения – 147 Позвоночно-спинномозговая травма – 133
- 23. Тренинги проводились 3 – 5 раз в неделю. Курс в среднем составил 5 тренировок. Время тренировки
- 24. Предварительные результаты У всех пациентов исследуемых групп отмечен рост степени активного участия, методика БОС позволяет пациентам
- 25. Предварительные результаты В 90% случаев получен положительный результат в виде увеличения толерантности к нагрузке, снижения ортостатической
- 26. Предварительный вывод Таким образом, на данном этапе исследования и обработки полученных данных можно сделать вывод о
- 28. Скачать презентацию
Слайд 2
Ключевая проблема реабилитации
Проблема восстановления передвижения и самообеспечения – ключевая в реабилитации больных
Ключевая проблема реабилитации
Проблема восстановления передвижения и самообеспечения – ключевая в реабилитации больных
Слайд 3Организационные системные ПРОБЛЕМЫ обеспечения реабилитационного процесса
1. Осуществление интенсивной двигательной терапии требует длительного
Организационные системные ПРОБЛЕМЫ обеспечения реабилитационного процесса
1. Осуществление интенсивной двигательной терапии требует длительного
Слайд 4
Роль роботов
При неаппаратной реабилитации для занятий ходьбой один больной требует участие трех
Роль роботов
При неаппаратной реабилитации для занятий ходьбой один больной требует участие трех
Слайд 5
Роль роботов
Ассистирующий робот позволяет проводить сеансы реабилитации:
с точно дозированной весовой и скоростной
Роль роботов
Ассистирующий робот позволяет проводить сеансы реабилитации:
с точно дозированной весовой и скоростной
Слайд 6Роль роботов
Главное же преимущество робот-ассистированной реабилитации – это возможность проведения тренировок на
Роль роботов
Главное же преимущество робот-ассистированной реабилитации – это возможность проведения тренировок на
Слайд 7Роботизированная терапия на комплексе
LOKOMAT PRO отвечает вышеописанным
требованиям и дает возможность
проведения интенсивной локомоторной
терапии
Роботизированная терапия на комплексе
LOKOMAT PRO отвечает вышеописанным
требованиям и дает возможность
проведения интенсивной локомоторной
терапии
Слайд 8На сегодняшний день в России 30 аппаратов
системы LOKOMAT
В России первые системы LOKOMAT
системы LOKOMAT
В России первые системы LOKOMAT
Слайд 9Ассистирующий робот Локомат,
медико-технологическая компания «Хокома АГ»,
Цюрих, Швейцария
Уже в течение двух
Ассистирующий робот Локомат,
медико-технологическая компания «Хокома АГ»,
Цюрих, Швейцария
Уже в течение двух
Слайд 10Система LOKOMAT PRO
Состоит из системы
поддержки массы
тела, беговой
дорожки,
роботизированных
ортезов, функции
БОС и
персонального
компьютера.
Система LOKOMAT PRO
Состоит из системы
поддержки массы
тела, беговой
дорожки,
роботизированных
ортезов, функции
БОС и
персонального
компьютера.
Слайд 11Метаанализ применения робот-ассистированной реабилитации при заболеваниях и травмах центральной нервной системы, исследовательская
Метаанализ применения робот-ассистированной реабилитации при заболеваниях и травмах центральной нервной системы, исследовательская
Слайд 12Т.о., робот-ассистированная реабилитация больных с повреждением функции ходьбы с точки зрения строгих
Т.о., робот-ассистированная реабилитация больных с повреждением функции ходьбы с точки зрения строгих
Слайд 13анализ представляемых в литературе материалов показывает, как правило, низкое число наблюдений, ограничивающееся
анализ представляемых в литературе материалов показывает, как правило, низкое число наблюдений, ограничивающееся
Слайд 14Нейропластичность – способность нервной
системы изменять свою морфо-функциональную структуру для восстановления утраченных функций.
Концепция
Нейропластичность – способность нервной
системы изменять свою морфо-функциональную структуру для восстановления утраченных функций.
Концепция
Слайд 15Целью настоящего исследования является анализ целесообразности применения робот-ассистирующей реабилитации и функции движения
Целью настоящего исследования является анализ целесообразности применения робот-ассистирующей реабилитации и функции движения
Слайд 16Дизайн данного клинического испытания:
интервенционный,
лечебный,
рандомизированный,
частично слепой,
с активным контролем,
параллельный,
Дизайн данного клинического испытания:
интервенционный,
лечебный,
рандомизированный,
частично слепой,
с активным контролем,
параллельный,
Слайд 17
Структура курса интервенций se
Во всех трех группах каждый испытуемый получает:
36 сеансов
Структура курса интервенций se
Во всех трех группах каждый испытуемый получает:
36 сеансов
Слайд 18
Структура интервенционной сессии на Локомате.
Размещение испытуемого в аппарате: 5–10 мин,
Разминка: 5–10
Структура интервенционной сессии на Локомате.
Размещение испытуемого в аппарате: 5–10 мин,
Разминка: 5–10
Слайд 19
Первичные конечные точки.
1. тест ходьбы в течение 1 минуты,
2. тест ходьбы на
Первичные конечные точки.
1. тест ходьбы в течение 1 минуты,
2. тест ходьбы на
Слайд 20Вторичные конечные точки
- тест «Индекс удовлетворенности жизнью А»
Предложен сотрудниками Чикагского университета Бернис
Вторичные конечные точки
- тест «Индекс удовлетворенности жизнью А»
Предложен сотрудниками Чикагского университета Бернис
Слайд 21
График тестирования
По всем конечным точкам тестирование проводится 4 раза:
После включения в число
График тестирования
По всем конечным точкам тестирование проводится 4 раза:
После включения в число
Слайд 22Материалы и методы
ЧМТ– 18 пациентов
Острое нарушение мозгового кровообращения – 147
Позвоночно-спинномозговая травма –
ЧМТ– 18 пациентов
Острое нарушение мозгового кровообращения – 147
Позвоночно-спинномозговая травма –
Слайд 23Тренинги проводились 3 – 5 раз в неделю.
Курс в среднем составил
Тренинги проводились 3 – 5 раз в неделю.
Курс в среднем составил
Слайд 24Предварительные результаты
У всех пациентов исследуемых групп отмечен рост степени активного участия, методика
Предварительные результаты
У всех пациентов исследуемых групп отмечен рост степени активного участия, методика
Слайд 25Предварительные результаты
В 90% случаев получен положительный результат в виде увеличения толерантности к
Предварительные результаты
В 90% случаев получен положительный результат в виде увеличения толерантности к
Слайд 26Предварительный вывод
Таким образом, на данном этапе исследования и обработки полученных данных можно
Предварительный вывод
Таким образом, на данном этапе исследования и обработки полученных данных можно
 Правила поведения на водоёмах в осенне-зимний период
Правила поведения на водоёмах в осенне-зимний период Уставный капитал 480 млн. рублей ОАО «Камский Индустриальный парк «Мастер» основано 29 июля 2004 года в городе Набережные Челны на базе
Уставный капитал 480 млн. рублей ОАО «Камский Индустриальный парк «Мастер» основано 29 июля 2004 года в городе Набережные Челны на базе Охрана окружающей среды и рациональное использование природных ресурсов
Охрана окружающей среды и рациональное использование природных ресурсов Презентация на тему Духовно-нравственное воспитание в современной школе
Презентация на тему Духовно-нравственное воспитание в современной школе Das ist eine alte deutsche Stadt
Das ist eine alte deutsche Stadt Моя помощь ближнему
Моя помощь ближнему 4 ноября - День народного единства. Историческая справка
4 ноября - День народного единства. Историческая справка Опекаемые и публичные благав экономической теории
Опекаемые и публичные благав экономической теории Семион Полоцкий
Семион Полоцкий Для презентаций
Для презентаций Долина смерти
Долина смерти животный мир
животный мир ПРОБЛЕМНОЕ ОБУЧЕНИЕ(PbL)
ПРОБЛЕМНОЕ ОБУЧЕНИЕ(PbL) В новый год со спортом. Фотопрезентация Железновой Анастасии
В новый год со спортом. Фотопрезентация Железновой Анастасии Организаторы:
Организаторы: Административные механизмы и стимулы в законодательстве об энергосбережении и о повышении энергетической эффективности в Россий
Административные механизмы и стимулы в законодательстве об энергосбережении и о повышении энергетической эффективности в Россий Архитектура вычислительной системы. Классификация компьютеров
Архитектура вычислительной системы. Классификация компьютеров Психология и творчество
Психология и творчество Деловой клуб
Деловой клуб Инвентаризация, её роль в бухгалтерском учёте
Инвентаризация, её роль в бухгалтерском учёте Палагайская школа вчера, сегодня, завтра
Палагайская школа вчера, сегодня, завтра Электронный журнал творческих работ учащихся «Путь к слову»
Электронный журнал творческих работ учащихся «Путь к слову» Личность. Индивид. Индивидуальность. Сознание. Самосознание
Личность. Индивид. Индивидуальность. Сознание. Самосознание В СПб и ЛО
В СПб и ЛО Промышленность Приозерска
Промышленность Приозерска Основания, кислоты, соли
Основания, кислоты, соли Сравнительный анализ конституции и транспортной системы России и Германии
Сравнительный анализ конституции и транспортной системы России и Германии Метод проектов – способ формирования исследовательской деятельности учащихся
Метод проектов – способ формирования исследовательской деятельности учащихся