- Системы управления электроприводов

Содержание
- 2. Литература: Основная Терехов В. М. Системы управления электроприводов: Учебник для студ. высш. учеб. заведений /В. М.
- 3. Литература: Дополнительная Шрейнер Р. Т. Системы подчиненного регулирования электроприводов Часть 1: Учеб. Пособие для вузов: Изд-во
- 4. Задачами изучения дисциплины СУЭП являются: овладение студентами комплексом знаний и умений в области теории, принципов построения
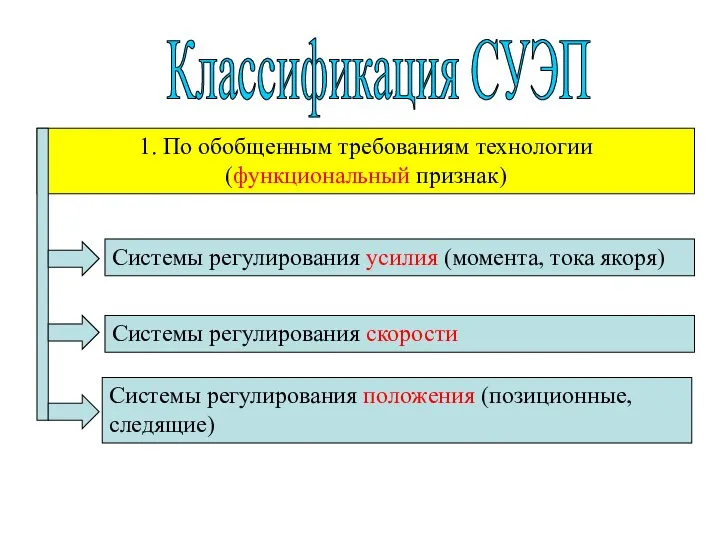
- 5. Классификация СУЭП 1. По обобщенным требованиям технологии (функциональный признак) Системы регулирования усилия (момента, тока якоря) Системы
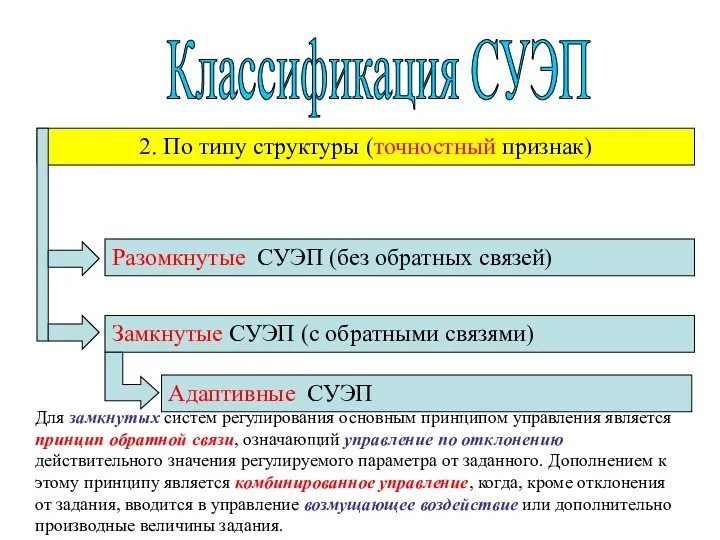
- 6. Классификация СУЭП 2. По типу структуры (точностный признак) Разомкнутые СУЭП (без обратных связей) Замкнутые СУЭП (с
- 7. Классификация СУЭП 3. По типу электродвигателя (конструкционный признак) СУЭП постоянного тока СУ асинхронными электроприводами СУ синхронными
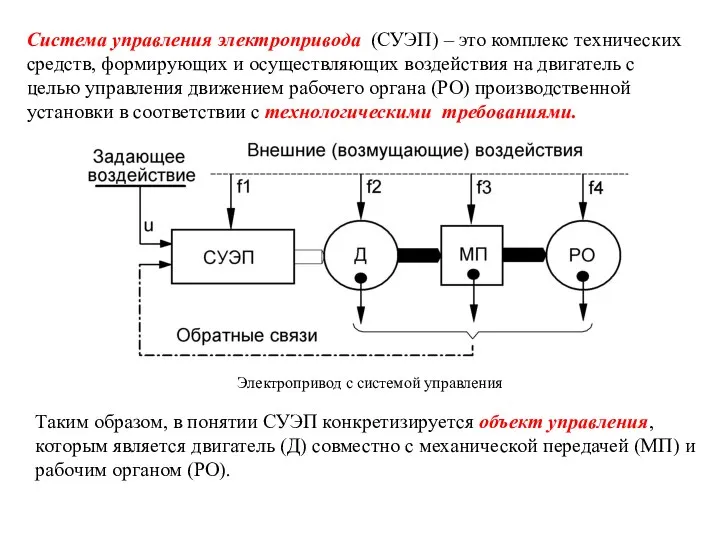
- 8. Система управления электропривода (СУЭП) – это комплекс технических средств, формирующих и осуществляющих воздействия на двигатель с
- 9. В составе СУЭП можно выделить слаботочную часть, формирующую алгоритм управления, и сильноточную часть, осуществляющую силовое управляющее
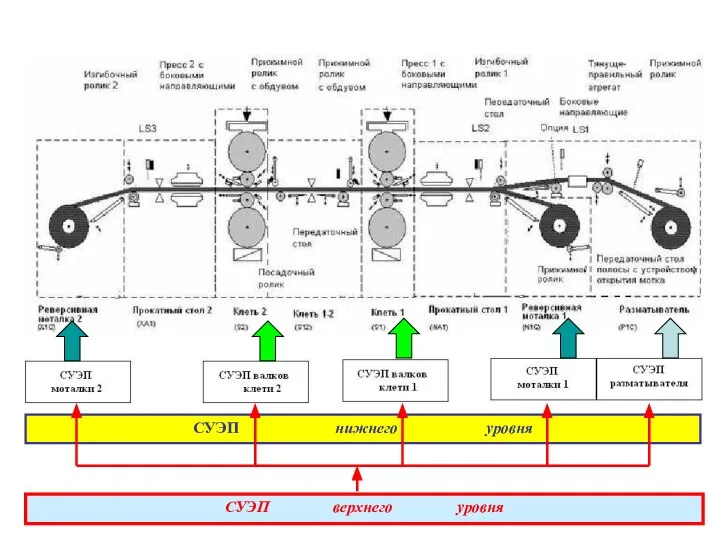
- 10. СУЭП нижнего уровня СУЭП верхнего уровня
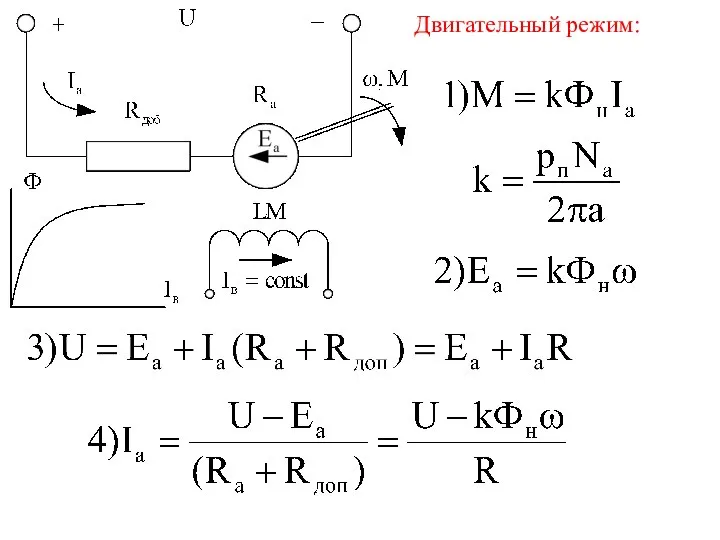
- 11. Двигательный режим:
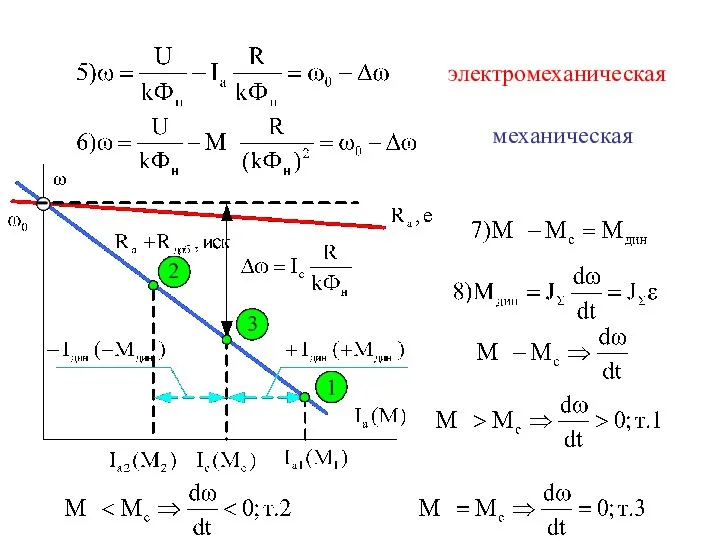
- 12. электромеханическая механическая
- 14. Скачать презентацию
Слайд 2Литература:
Основная
Терехов В. М. Системы управления электроприводов: Учебник для студ. высш.
Литература:
Основная
Терехов В. М. Системы управления электроприводов: Учебник для студ. высш.
Слайд 3Литература:
Дополнительная
Шрейнер Р. Т. Системы подчиненного регулирования электроприводов Часть 1: Учеб.
Литература:
Дополнительная
Шрейнер Р. Т. Системы подчиненного регулирования электроприводов Часть 1: Учеб.
Слайд 4Задачами изучения дисциплины СУЭП являются: овладение студентами комплексом знаний и умений в
Задачами изучения дисциплины СУЭП являются: овладение студентами комплексом знаний и умений в
Слайд 5Классификация СУЭП
1. По обобщенным требованиям технологии (функциональный признак)
Системы регулирования усилия (момента,
Классификация СУЭП
1. По обобщенным требованиям технологии (функциональный признак)
Системы регулирования усилия (момента,
Слайд 6Классификация СУЭП
2. По типу структуры (точностный признак)
Разомкнутые СУЭП (без обратных связей)
Замкнутые
Классификация СУЭП
2. По типу структуры (точностный признак)
Разомкнутые СУЭП (без обратных связей)
Замкнутые
Слайд 7Классификация СУЭП
3. По типу электродвигателя (конструкционный признак)
СУЭП постоянного тока
СУ асинхронными электроприводами
СУ
Классификация СУЭП
3. По типу электродвигателя (конструкционный признак)
СУЭП постоянного тока
СУ асинхронными электроприводами
СУ

Слайд 8Система управления электропривода (СУЭП) – это комплекс технических средств, формирующих и осуществляющих
Система управления электропривода (СУЭП) – это комплекс технических средств, формирующих и осуществляющих
Слайд 9В составе СУЭП можно выделить слаботочную часть, формирующую алгоритм управления, и сильноточную
В составе СУЭП можно выделить слаботочную часть, формирующую алгоритм управления, и сильноточную
Слайд 10СУЭП нижнего уровня
СУЭП верхнего уровня
СУЭП нижнего уровня
СУЭП верхнего уровня
Слайд 11Двигательный режим:
Двигательный режим:
Слайд 12электромеханическая
механическая
электромеханическая
механическая
 Общие и отличительные черты менеджмента в государственном и частном секторах
Общие и отличительные черты менеджмента в государственном и частном секторах Депозитарная система Республики Беларусь. Установление корреспондентских отношений с иностранными депозитариями.
Депозитарная система Республики Беларусь. Установление корреспондентских отношений с иностранными депозитариями. Использование НИТ на уроках биологии как средство развития познавательного интереса школьников
Использование НИТ на уроках биологии как средство развития познавательного интереса школьников Площадки для детей Romana
Площадки для детей Romana Как научиться рисовать
Как научиться рисовать Урок 4 Художник и окружающий мир
Урок 4 Художник и окружающий мир СПЕЦИАЛИЗАЦИЯ«Автоматизация управления энергосистемами»кафедры «Технической кибернетики»МФТИ
СПЕЦИАЛИЗАЦИЯ«Автоматизация управления энергосистемами»кафедры «Технической кибернетики»МФТИ Презентация на тему Символика России
Презентация на тему Символика России Изучение лекарственных растений Мариинского района
Изучение лекарственных растений Мариинского района Дом, в котором я живу
Дом, в котором я живу Прямолинейное и криволинейное движение. Движение тела по окружности
Прямолинейное и криволинейное движение. Движение тела по окружности Звезды на небе
Звезды на небе «Клаудс-менеджмент»(Разработка модуля интеллектуального управления ресурсами облачной платформы для организации доступности в
«Клаудс-менеджмент»(Разработка модуля интеллектуального управления ресурсами облачной платформы для организации доступности в About Britain (О Британии)
About Britain (О Британии) Инструменты анализа ключевых слов для западной аудитории
Инструменты анализа ключевых слов для западной аудитории Термографическое обследование электрооборудования Белорусской энергосистемы
Термографическое обследование электрооборудования Белорусской энергосистемы «Отдыхай – ка»
«Отдыхай – ка» Заголовок
Заголовок  Презентация на тему Причины ВТОРОЙ МИРОВОЙ ВОЙНЫ
Презентация на тему Причины ВТОРОЙ МИРОВОЙ ВОЙНЫ  Презентация на тему Электрический ток в различных средах
Презентация на тему Электрический ток в различных средах Златоустовская гравюра
Златоустовская гравюра Географическая зональность и азональность
Географическая зональность и азональность Введение рынка мощности и перспективы либерализации оптового рынка электроэнергии.
Введение рынка мощности и перспективы либерализации оптового рынка электроэнергии. Трудовой стаж
Трудовой стаж ОТ ЭНЕРГОЭФФЕКТИВНОГО ОБОРУДОВАНИЯ К ЭНЕРГОЭФФЕКТИВНЫМ ЗДАНИЯМ
ОТ ЭНЕРГОЭФФЕКТИВНОГО ОБОРУДОВАНИЯ К ЭНЕРГОЭФФЕКТИВНЫМ ЗДАНИЯМ 10 занимательных фактов из истории Олимпийских игр
10 занимательных фактов из истории Олимпийских игр Музыкальная культура
Музыкальная культура Детский центр программирования ProGame предлагает вакансию
Детский центр программирования ProGame предлагает вакансию