- Соколов А.П.ТЕОРЕТИЧЕСКАЯ МЕХАНИКА(часть 1)

Содержание
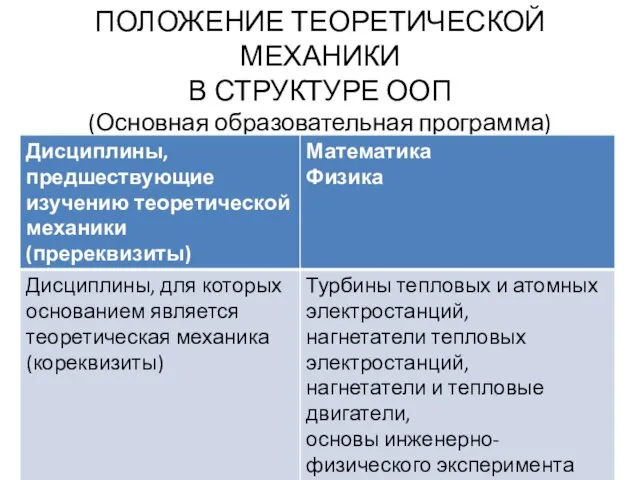
- 2. ПОЛОЖЕНИЕ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ В СТРУКТУРЕ ООП (Основная образовательная программа)
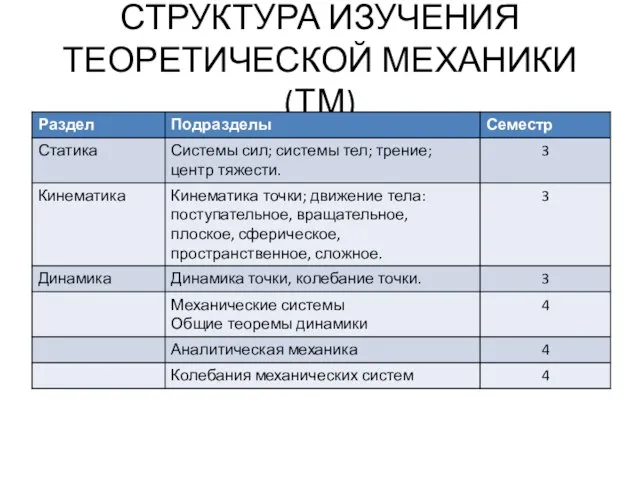
- 3. СТРУКТУРА ИЗУЧЕНИЯ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ (ТМ)
- 4. ЦЕЛИ ИЗУЧЕНИЯ ТМ (по рабочей программе) В результате освоения данной дисциплины бакалавр приобретает знания, умения и
- 5. РАЗВИТИЕ МЕХАНИКИ СВЯЗАНО С РАСШИРЕНИЕМ КРУГА РЕШАЕМЫХ ПРАКТИЧЕСКИХ ЗАДАЧ. До Аристотеля (384 – 322 гг. до
- 6. МОДЕЛИРОВАНИЕ – ГЛАВНОЕ НАПРАВЛЕНИЕ РАЗВИТИЯ ТМ Общим во всех этих умениях является умение анализировать техническую задачу
- 7. АБСТРАКТНЫЕ МОДЕЛИ РЕАЛЬНЫХ ТЕЛ В теоретической механике изучается движение одних тел относительно других тел, которые принимаются
- 8. ОСНОВНЫЕ АБСТРАКТНЫЕ МОДЕЛИ РЕАЛЬНЫХ ТЕЛ 1.Материальная точка – тело, размерами которого можно пренебречь в рамках конкретной
- 9. ВЫРОЖДЕННЫЕ МОДЕЛИ бесконечно тонкий стержень – стержень, который «работает» только на растяжение и сжатие, но не
- 10. СВОЙСТВА ПРОСТРАНСТВА (для идеальных условий) Свойства пространства были постулированы при решении задач астрономии, т.е. для идеальных
- 11. СВОЙСТВА ПРОСТРАНСТВА (для реальных условий) При решении задач в реальных условиях учитывается не только неоднородность и
- 12. СИСТЕМЫ ОТСЧЁТА Свойства системы отсчёта (неоднородность и анизотропность) затрудняют наблюдение за движением тела. Практически свободна от
- 13. ИНЕРЦИАЛЬНАЯ СИСТЕМА ОТСЧЁТА Инерциальная система отсчёта – такая, собственное движение которой не может быть обнаружено никаким
- 14. . Реальные тела взаимодействуют. Сила – мера механического взаимодействия тел. При взаимодействии меняется состояние движения системы.
- 15. ИДЕОЛОГИЯ И ПРИНЦИПЫ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ Идеология ТМ От простого к сложному Принципы ТМ В основе –
- 16. статика Статика (от греч. στατικε - неподвижное) – раздел теоретической механики, в котором изучается равновесие тела
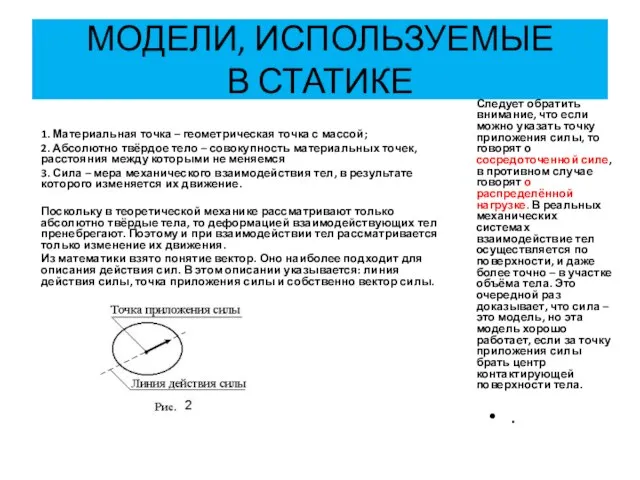
- 17. МОДЕЛИ, ИСПОЛЬЗУЕМЫЕ В СТАТИКЕ 1. Материальная точка – геометрическая точка с массой; 2. Абсолютно твёрдое тело
- 18. ОПЕРАЦИИ С ВЕКТОРАМИ 1.Сложение векторов. 2.Вычитание векторов. 3.Умножение вектора на скаляр. 4.Проецирование вектора на декартовые оси.
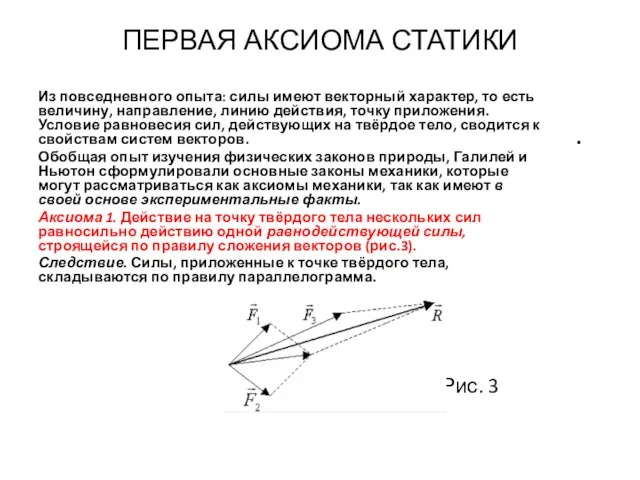
- 19. ПЕРВАЯ АКСИОМА СТАТИКИ Из повседневного опыта: силы имеют векторный характер, то есть величину, направление, линию действия,
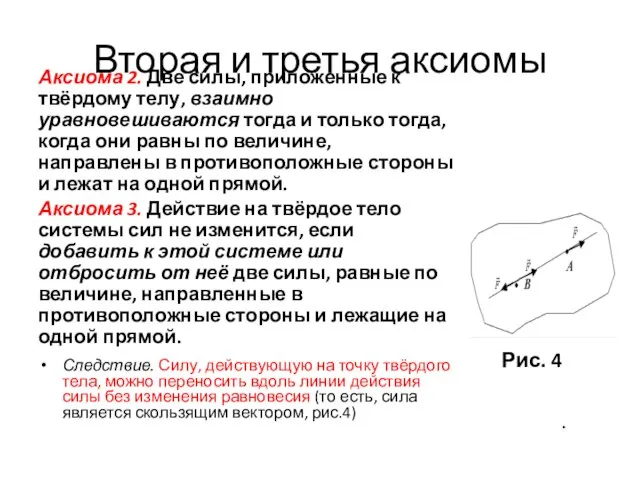
- 20. Вторая и третья аксиомы Аксиома 2. Две силы, приложенные к твёрдому телу, взаимно уравновешиваются тогда и
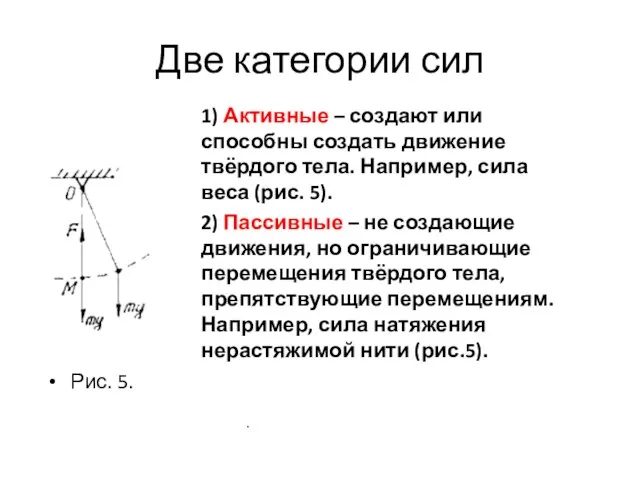
- 21. Две категории сил . Рис. 5. 1) Активные – создают или способны создать движение твёрдого тела.
- 22. АКСИОМЫ СТАТИКИ (ПРОДОЛЖЕНИЕ) Четвёртая аксиома Действие одного тела на второе равно и противоположно действию этого второго
- 23. СВЯЗИ И РЕАКЦИИ Связи – тела, ограничивающие движение данного тела. Это определение сформулировано для случая одного
- 24. СХЕМЫ СВЯЗЕЙ .
- 25. СХЕМЫ СВЯЗЕЙ ПРОДОЛЖЕНИЕ .
- 26. СХЕМЫ СВЯЗЕЙ (ОКОНЧАНИЕ) .
- 27. АНАЛИТИЧЕСКОЕ ВЫРАЖЕНИЕ СВЯЗИ Схема связи В теоретической механике часто связь рассматривают с геометрической точки зрения именно
- 28. СИСТЕМА СХОДЯЩИХСЯ СИЛ (ССС) Системой сходящихся сил называется такая система сил, линии действия которых пересекаются в
- 29. Приведение ССС к равнодействующей Исходную систему сходящихся сил (рис. 6) можно преобразовать. На основании следствия третьей
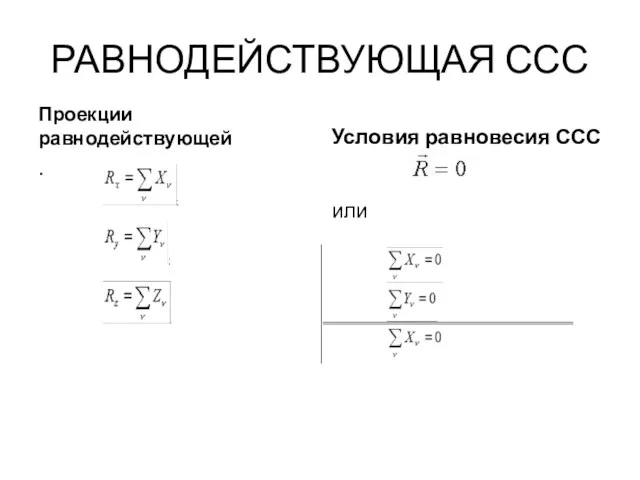
- 30. РАВНОДЕЙСТВУЮЩАЯ ССС Проекции равнодействующей . Условия равновесия ССС или
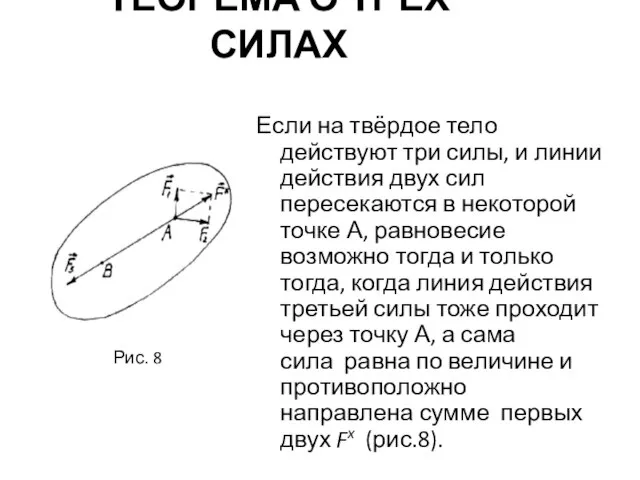
- 31. ТЕОРЕМА О ТРЁХ СИЛАХ Если на твёрдое тело действуют три силы, и линии действия двух сил
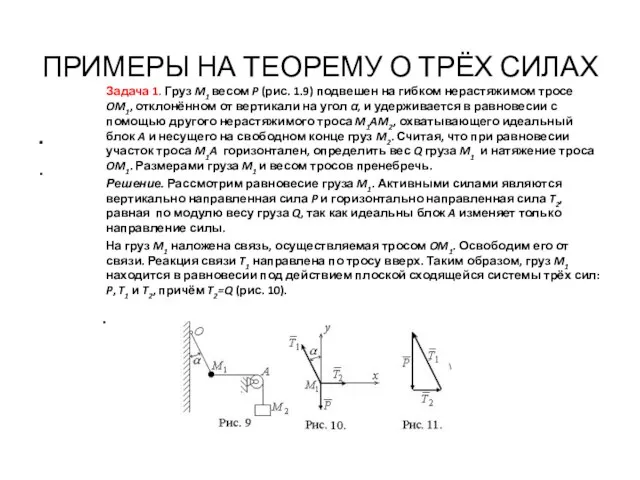
- 32. ПРИМЕРЫ НА ТЕОРЕМУ О ТРЁХ СИЛАХ . . Задача 1. Груз M1 весом P (рис. 1.9)
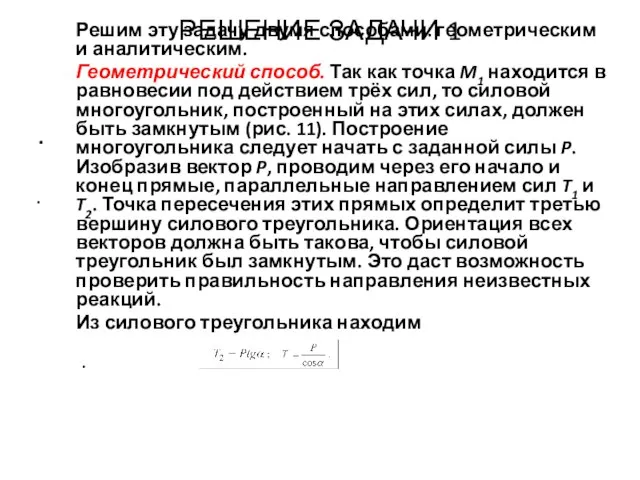
- 33. РЕШЕНИЕ ЗАДАЧИ 1 . . Решим эту задачу двумя способами: геометрическим и аналитическим. Геометрический способ. Так
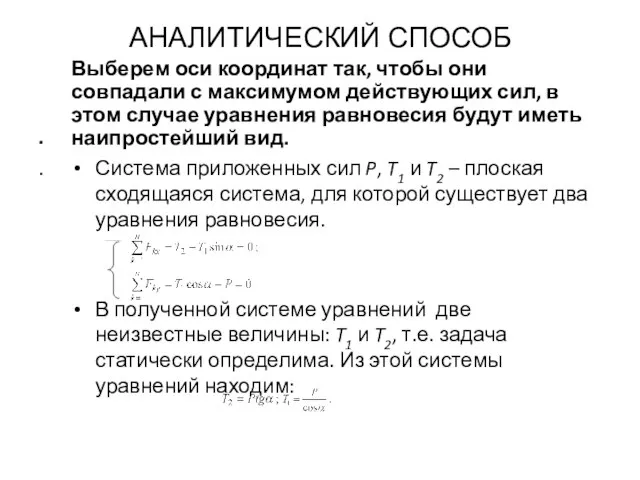
- 34. АНАЛИТИЧЕСКИЙ СПОСОБ . . Выберем оси координат так, чтобы они совпадали с максимумом действующих сил, в
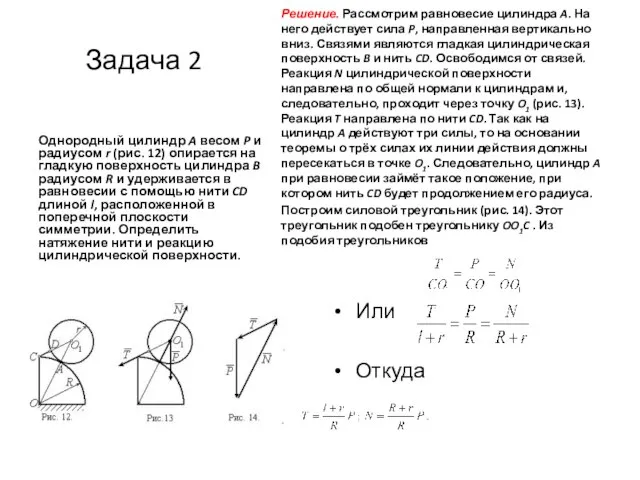
- 35. Задача 2 Однородный цилиндр A весом P и радиусом r (рис. 12) опирается на гладкую поверхность
- 36. СЛОЖЕНИЕ ДВУХ ПАРАЛЛЕЛЬНЫХ СИЛ Силы направлены в одну сторону (рис. 15) . Силы направлены в противоположные
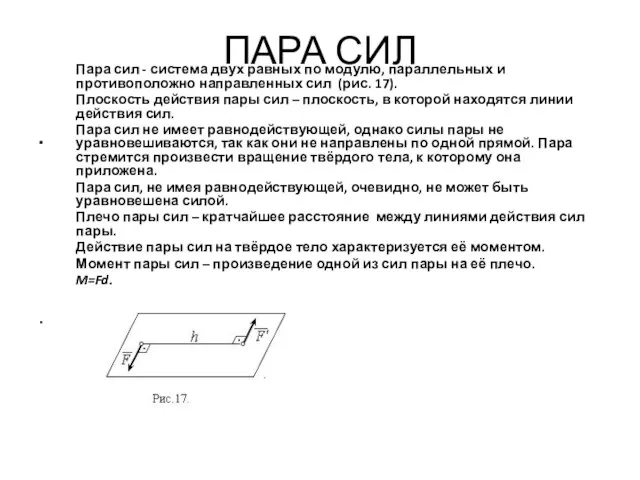
- 37. ПАРА СИЛ . . Пара сил - система двух равных по модулю, параллельных и противоположно направленных
- 38. МОМЕНТ ПАРЫ СИЛ Момент пары в пространстве . Момент пары сил изображают вектором. Вектор момента пары
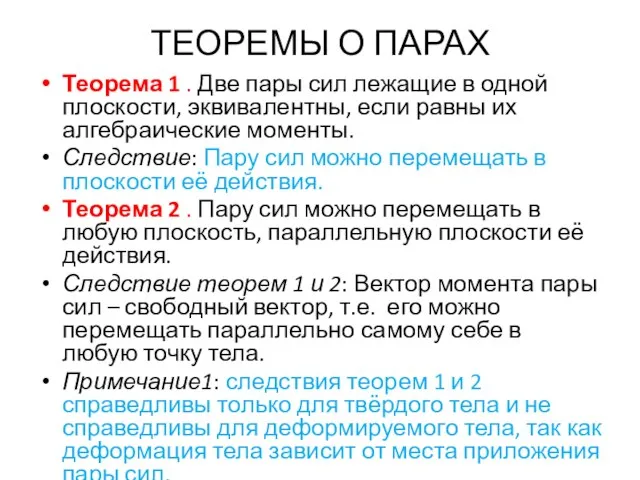
- 39. ТЕОРЕМЫ О ПАРАХ Теорема 1 . Две пары сил лежащие в одной плоскости, эквивалентны, если равны
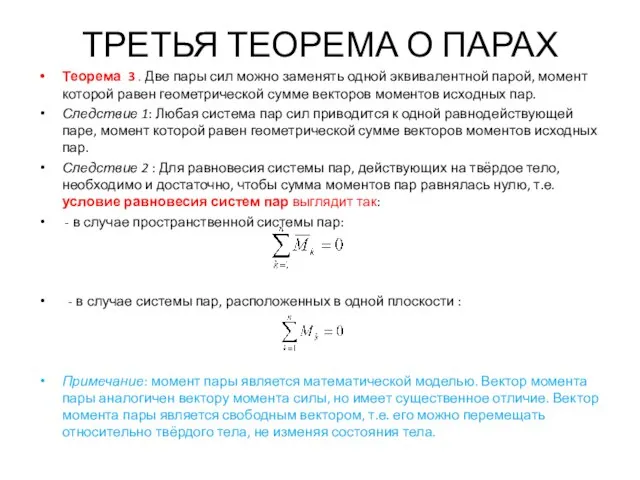
- 40. ТРЕТЬЯ ТЕОРЕМА О ПАРАХ Теорема 3 . Две пары сил можно заменять одной эквивалентной парой, момент
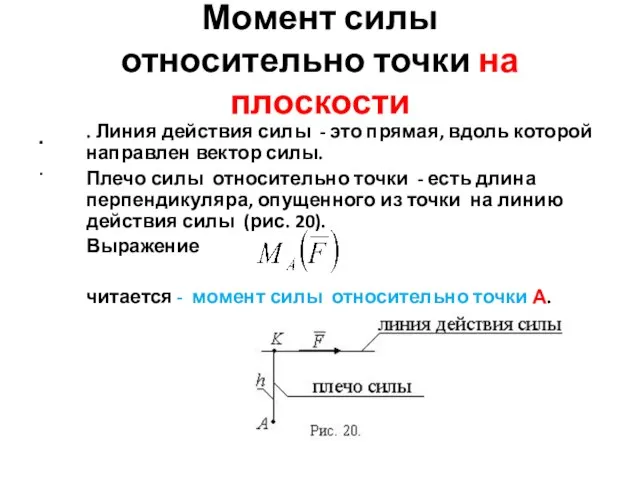
- 41. Момент силы относительно точки на плоскости . . . Линия действия силы - это прямая, вдоль
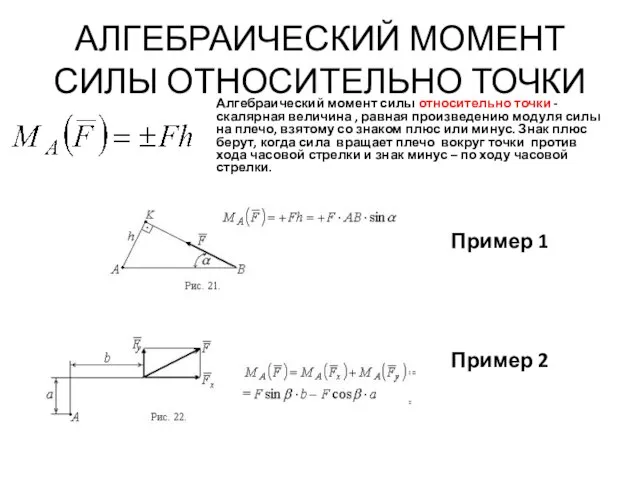
- 42. АЛГЕБРАИЧЕСКИЙ МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ Пример 1 Пример 2 Алгебраический момент силы относительно точки - скалярная
- 43. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ в пространстве . (векторная величина) Момент силы относительно точки изображается вектором ,
- 44. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ . . Правило определения момента силы относительно оси (например z). Чтобы вычислить
- 45. АНАЛИТИЧЕСКИЕ ВЫРАЖЕНИЯ МОМЕНТА .
- 46. Аналитические выражения момента Продолжение .
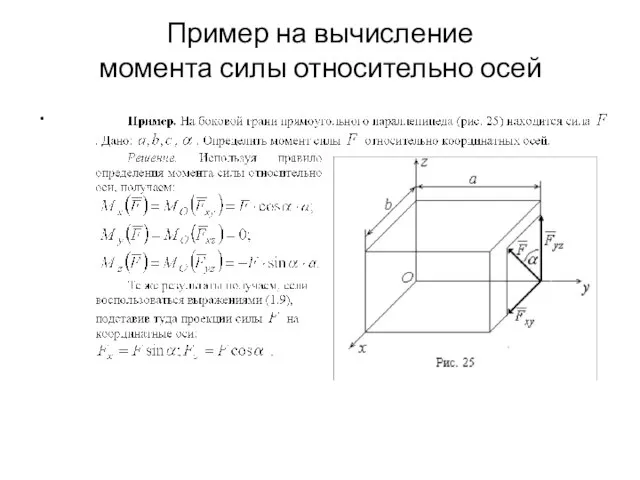
- 47. Пример на вычисление момента силы относительно осей .
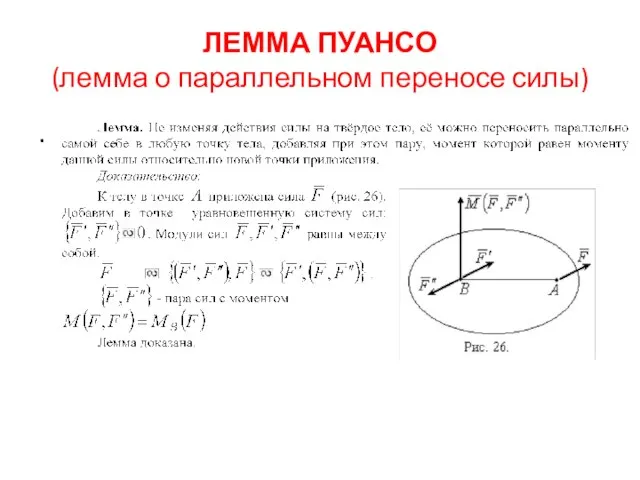
- 48. ЛЕММА ПУАНСО (лемма о параллельном переносе силы) .
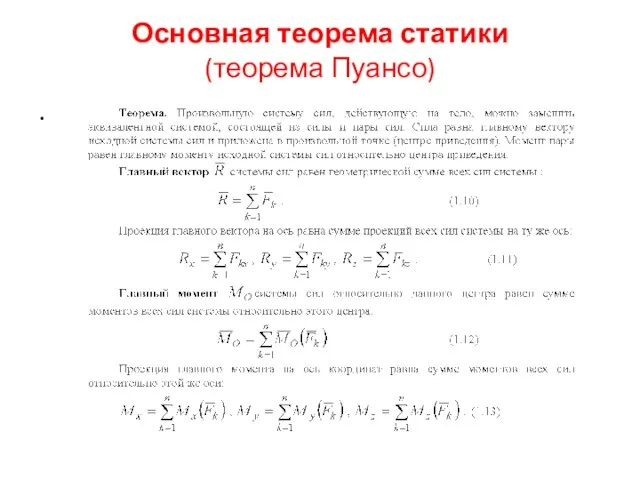
- 49. Основная теорема статики (теорема Пуансо) .
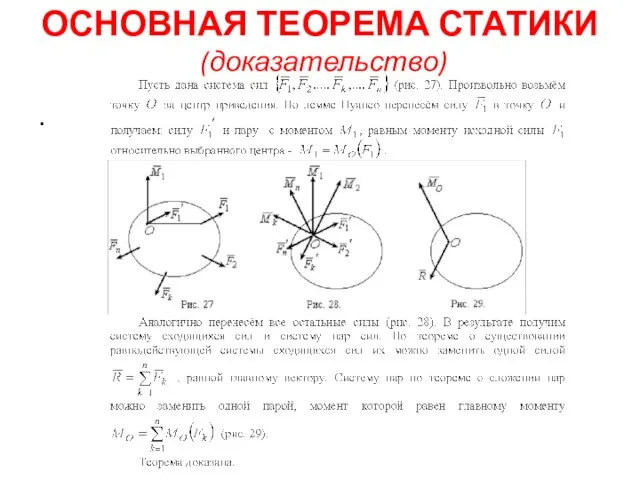
- 50. ОСНОВНАЯ ТЕОРЕМА СТАТИКИ (доказательство) .
- 51. УСЛОВИЯ РАВНОВЕСИЯ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ .
- 52. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ .
- 53. УСЛОВИЯ РАВНОВЕСИЯ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ .
- 54. ПЛОСКАЯ СИСТЕМА СИЛ ТРИ ФОРМЫ УСЛОВИЙ РАВНОВЕСИЯ .
- 55. ЦЕНТР ТЯЖЕСТИ .
- 56. ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ .
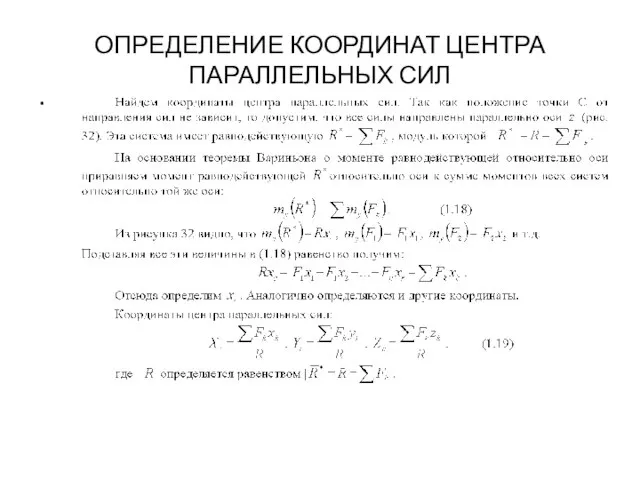
- 57. ОПРЕДЕЛЕНИЕ КООРДИНАТ ЦЕНТРА ПАРАЛЛЕЛЬНЫХ СИЛ .
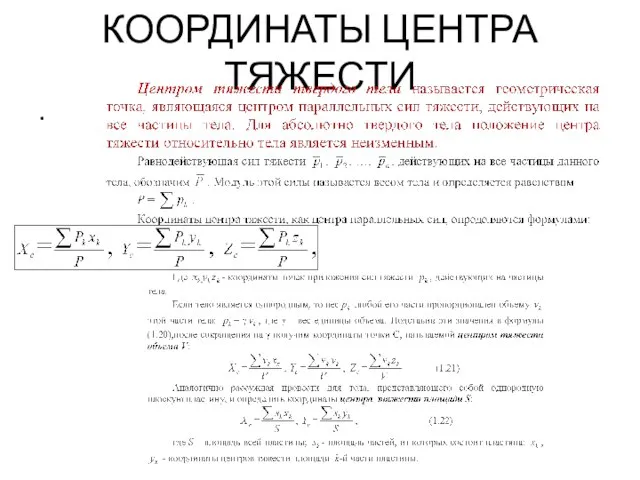
- 58. КООРДИНАТЫ ЦЕНТРА ТЯЖЕСТИ .
- 59. СЦЕПЛЕНИЕ И ТРЕНИЕ СКОЛЬЖЕНИЯ .
- 60. РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ .
- 61. РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ (продолжение) .
- 62. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ СИСТЕМЫ Статически определимые системы – это такие системы тел, в которых число уравнений равно
- 63. КОНТРОЛЬНЫЕ ВОПРОСЫ ПО СТАТИКЕ 1. Назовите основные модели реальных тел в теоретической механике. 2. Сформулируйте аксиомы
- 64. Соколов А.П. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА (часть 2) для студентов ЭНИН направления 140100 ТЕПЛОЭНЕРГЕТИКА
- 65. КИНЕМАТИКА Кинематика – раздел теоретической механики, в котором изучается движение тел без учёта действующих сил, т.е.
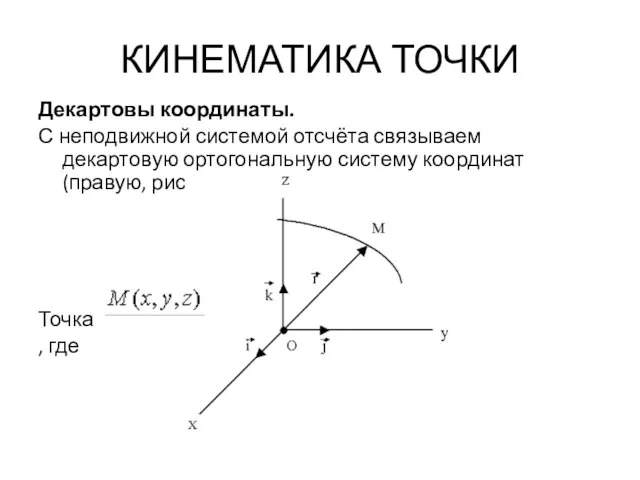
- 66. КИНЕМАТИКА ТОЧКИ Декартовы координаты. С неподвижной системой отсчёта связываем декартовую ортогональную систему координат (правую, рис. 38).
- 67. ТРАЕКТОРИЯ ТОЧКИ .
- 68. ОПРЕДЕЛЕНИЕ СКОРОСТИ ТОЧКИ .
- 69. ОПРЕДЕЛЕНИЕ СКОРОСТИ (продолжение) .
- 70. ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ ТОЧКИ .
- 71. УСКОРЕНИЕ ТОЧКИ (продолжение) .
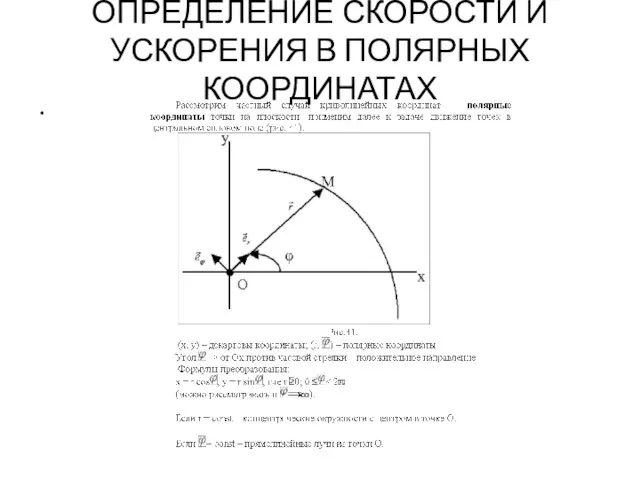
- 72. ОПРЕДЕЛЕНИЕ СКОРОСТИ И УСКОРЕНИЯ В ПОЛЯРНЫХ КООРДИНАТАХ .
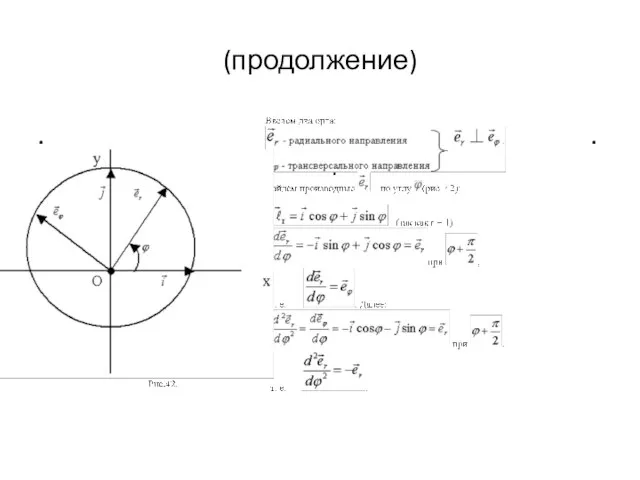
- 73. (продолжение) . . . .
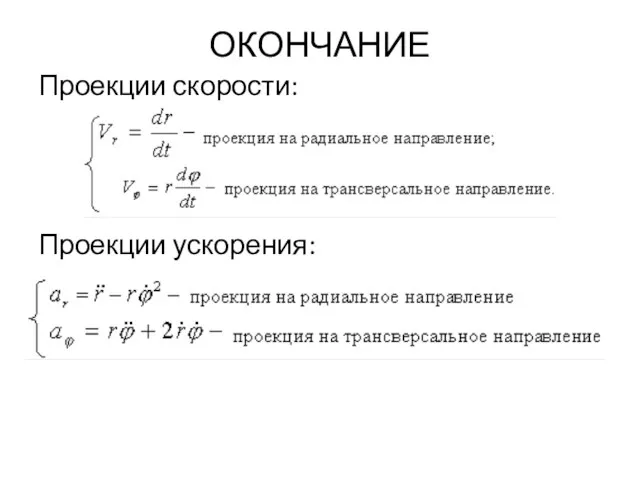
- 74. ОКОНЧАНИЕ Проекции скорости: Проекции ускорения:
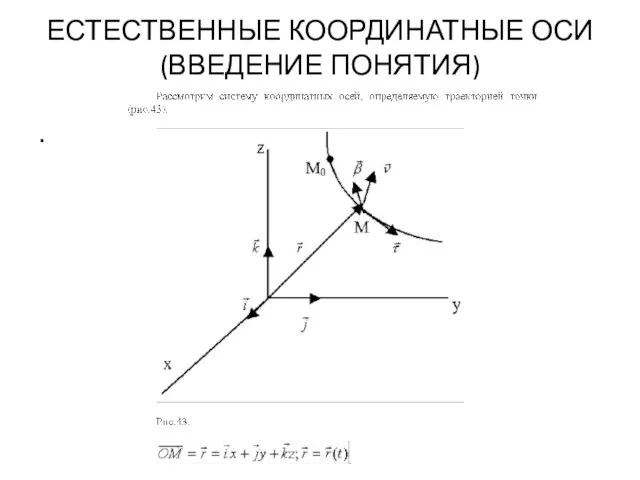
- 75. ЕСТЕСТВЕННЫЕ КООРДИНАТНЫЕ ОСИ (ВВЕДЕНИЕ ПОНЯТИЯ) .
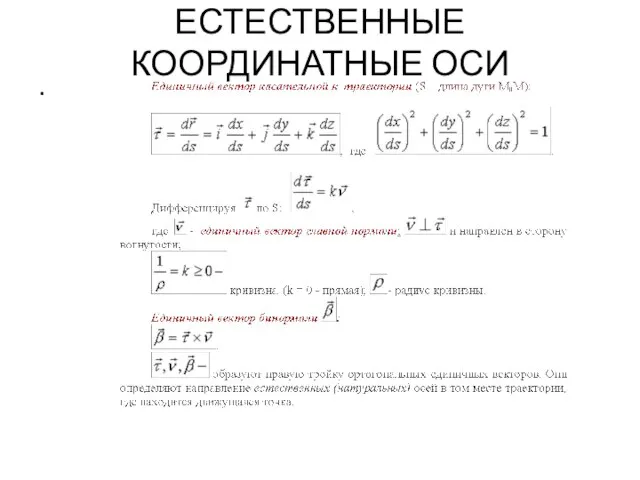
- 76. ЕСТЕСТВЕННЫЕ КООРДИНАТНЫЕ ОСИ .
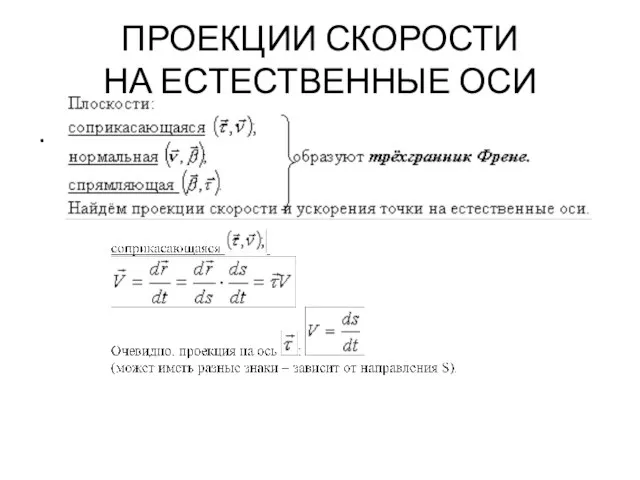
- 77. ПРОЕКЦИИ СКОРОСТИ НА ЕСТЕСТВЕННЫЕ ОСИ .
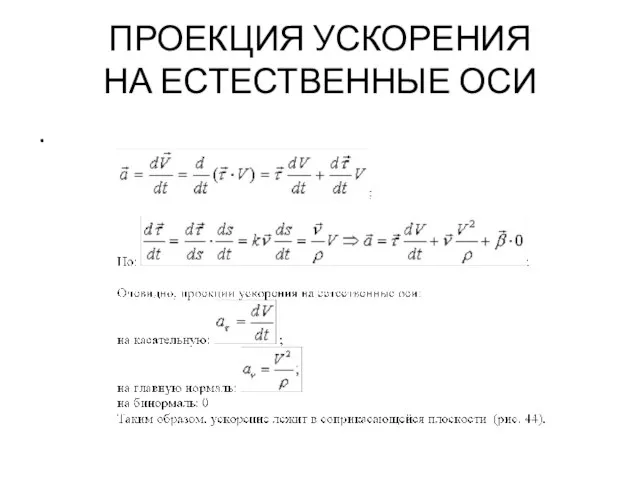
- 78. ПРОЕКЦИЯ УСКОРЕНИЯ НА ЕСТЕСТВЕННЫЕ ОСИ .
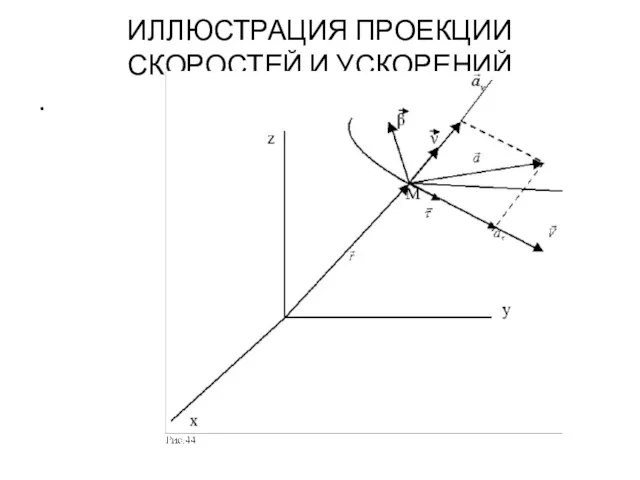
- 79. ИЛЛЮСТРАЦИЯ ПРОЕКЦИИ СКОРОСТЕЙ И УСКОРЕНИЙ .
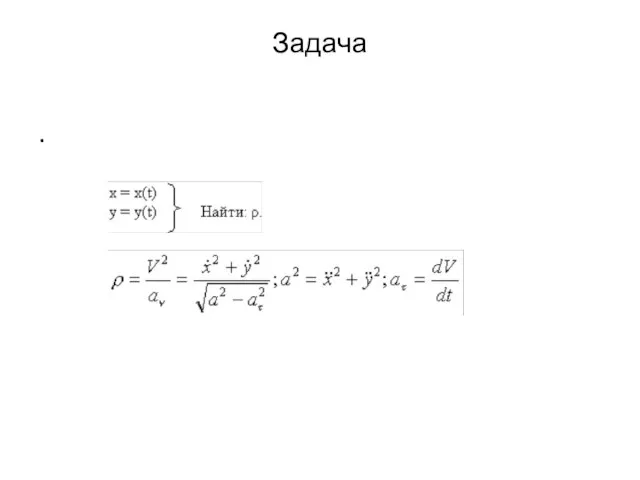
- 80. Задача .
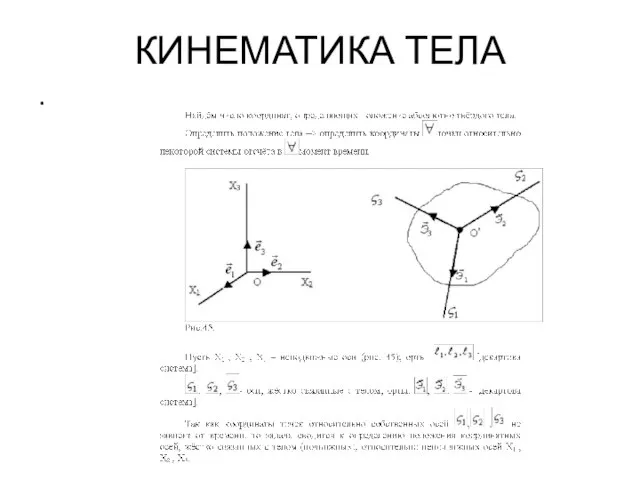
- 81. КИНЕМАТИКА ТЕЛА .
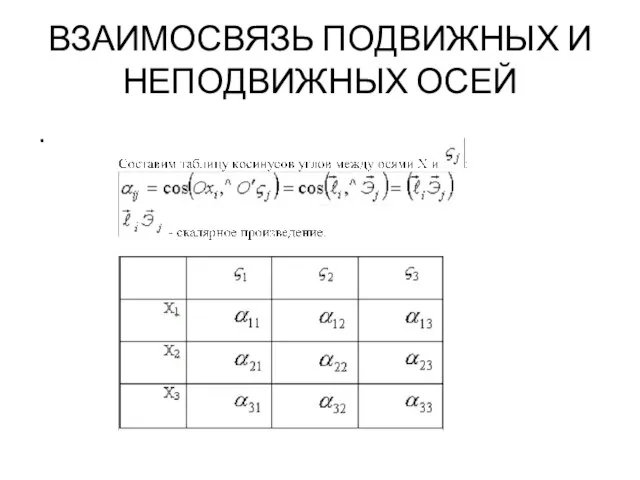
- 82. ВЗАИМОСВЯЗЬ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОСЕЙ .
- 83. ДОКАЗАТЕЛЬСТВО НЕОБХОДИМОСТИ ШЕСТИ НЕЗАВИСИМЫХ КООРДИНАТ ДЛЯ СВОБОДНОГО ТВЁРДОГО ТЕЛА .
- 84. ДОКАЗАТЕЛЬСТВО НЕОБХОДИМОСТИ ШЕСТИ НЕЗАВИСИМЫХ КООРДИНАТ ДЛЯ СВОБОДНОГО ТВЁРДОГО ТЕЛА (окончание) .
- 85. ВЫВОД ФОРМУЛЫ ЭЙЛЕРА .
- 86. ПЕРЕХОД К АБСОЛЮТНОЙ СКОРОСТИ .
- 87. ФОРМА РАСПРЕДЕЛЕНИЯ СКОРОСТЕЙ .
- 88. Учёт свойств симметрии уравнений .
- 89. Учёт движения относительно полюса .
- 90. Учёт угловых скоростей движения тела .
- 91. ФОРМУЛА ЭЙЛЕРА В ВЕКТОРНОЙ ЗАПИСИ .
- 92. НАХОЖДЕНИЕ РАСПРЕДЕЛЕНИЯ УСКОРЕНИЙ .
- 93. . .
- 94. ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТЕЛА .
- 95. ДОКАЗАТЕЛЬСТВО ТЕОРЕМЫ О СКОРОСТЯХ ТОЧЕК ПРИ ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ .
- 96. ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ .
- 97. Нахождение скоростей и ускорений при вращательном движении .
- 98. Распределение скоростей и ускорений при вращательном движении .
- 99. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ .
- 100. ИЛЛЮСТРАЦИЯ ПЛОСКОПАРАЛЛЕЛЬНОГО ДВИЖЕНИЯ .
- 101. АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ МЦС .
- 102. АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ МЦС (продолжение) .
- 103. ПРИМЕР ОПРЕДЕЛЕНИЯ МЦС .
- 104. Сложное движение точки .
- 105. Движение в подвижной системе координат .
- 106. Определение относительной скорости
- 107. Определение абсолютной скорости .
- 108. ОПРЕДЕЛЕНИЕ АБСОЛЮТНОГО УСКОРЕНИЯ .
- 109. Формула Кориолиса .
- 111. Соколов А.П. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА (часть 3) для студентов ЭНИН направления 140100 ТЕПЛОЭНЕРГЕТИКА
- 112. ДИНАМИКА ТОЧКИ .
- 113. Меры движения .
- 114. Кинетическая энергия материальной точки .
- 115. ЗАКОНЫ НЬЮТОНА .
- 116. ТРЕТИЙ ЗАКОН НЬЮТОНА .
- 117. ПРИНЦИП СУПЕРПОЗИЦИИ .
- 118. ИДЕАЛИЗАЦИЯ СИЛ .
- 119. ЗАДАЧИ ДИНАМИКИ ТОЧКИ .
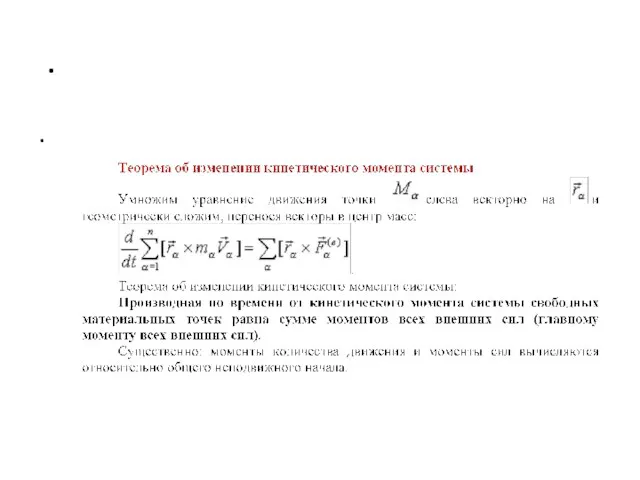
- 120. ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ .
- 121. Теорема об изменении кинетической энергии .
- 122. ЗАКОНЫ СОХРАНЕНИЯ .
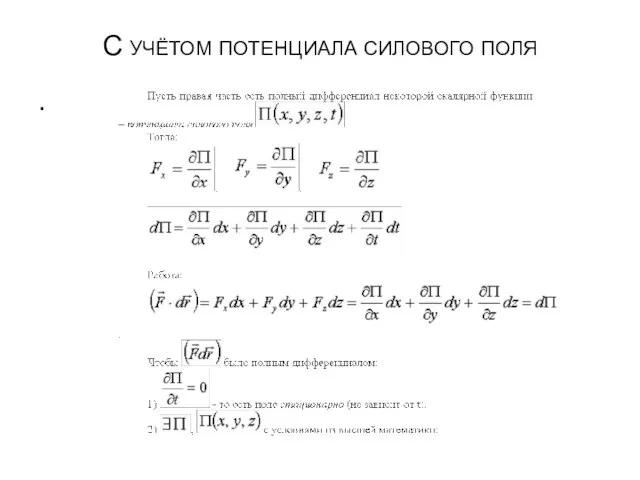
- 123. С учётом потенциала силового поля .
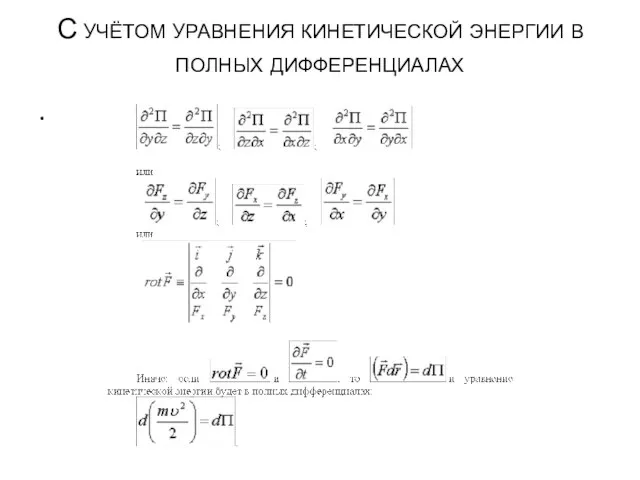
- 124. С учётом уравнения кинетической энергии в полных дифференциалах .
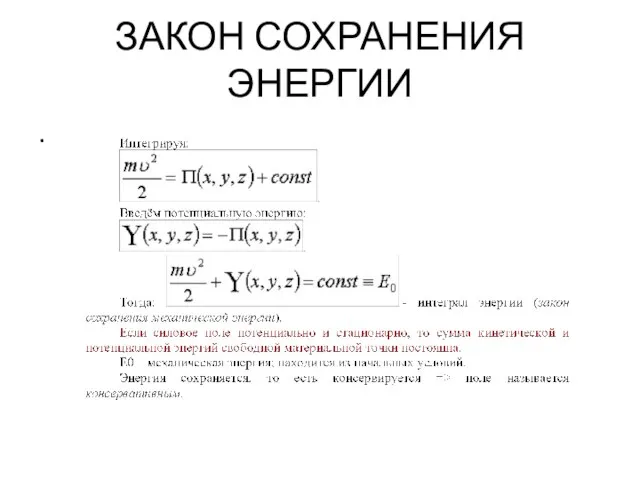
- 125. ЗАКОН СОХРАНЕНИЯ ЭНЕРГИИ .
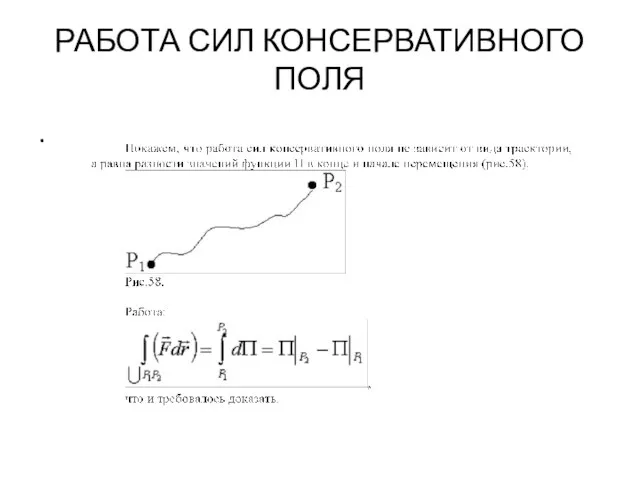
- 126. РАБОТА СИЛ КОНСЕРВАТИВНОГО ПОЛЯ .
- 127. Работа сил консервативного поля на замкнутом перемещении .
- 128. Решение уравнений движения для частных случаев силовых полей .
- 129. . .
- 130. . .
- 131. ДИНАМИКА МЕХАНИЧЕСКОЙ СИСТЕМЫ .
- 132. МАССОВЫЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ .
- 133. ОСНОВНЫЕ МЕРЫ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК .
- 134. Кинетический момент и кинетическая энергия системы .
- 135. СИЛЫ ВНЕШНИЕ И ВНУТРЕННИЕ .
- 136. СВОЙСТВА ВНУТРЕННИХ СИЛ .
- 137. Сумма элементарных работ внутренних сил .
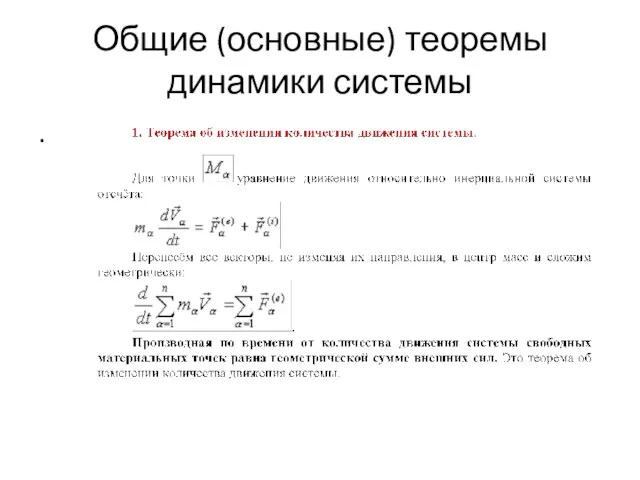
- 138. Общие (основные) теоремы динамики системы .
- 139. . .
- 140. . .
- 141. . .
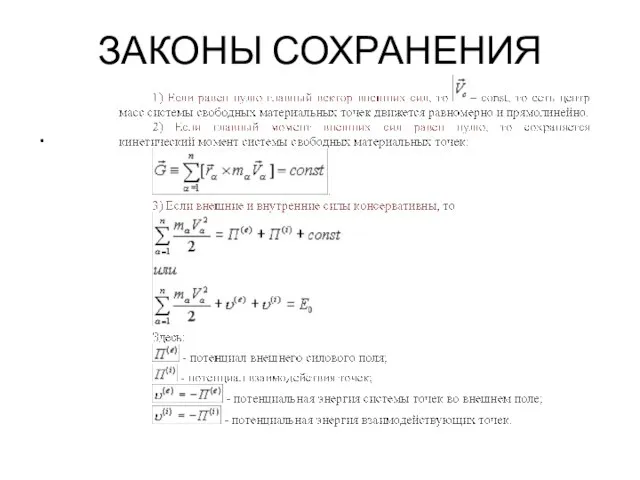
- 142. ЗАКОНЫ СОХРАНЕНИЯ .
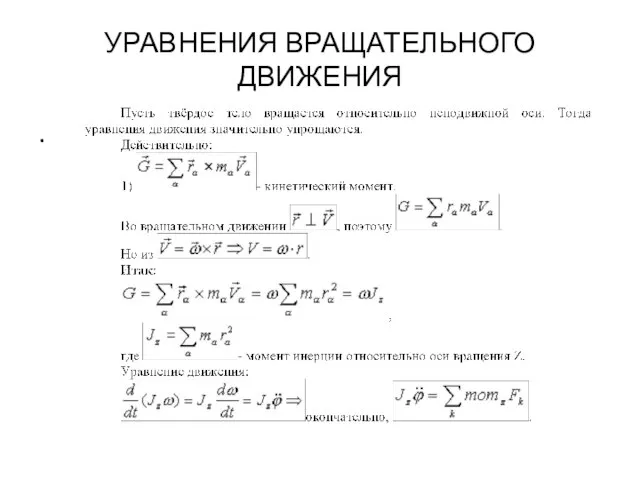
- 143. УРАВНЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ .
- 144. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ .
- 145. Моменты инерции некоторых тел .
- 146. ПРИМЕР .
- 148. Скачать презентацию
Слайд 3СТРУКТУРА ИЗУЧЕНИЯ
ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ (ТМ)
СТРУКТУРА ИЗУЧЕНИЯ
ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ (ТМ)
Слайд 4ЦЕЛИ ИЗУЧЕНИЯ ТМ
(по рабочей программе)
В результате освоения данной дисциплины бакалавр приобретает знания,
ЦЕЛИ ИЗУЧЕНИЯ ТМ
(по рабочей программе)
В результате освоения данной дисциплины бакалавр приобретает знания,
Слайд 5РАЗВИТИЕ МЕХАНИКИ СВЯЗАНО С РАСШИРЕНИЕМ КРУГА РЕШАЕМЫХ ПРАКТИЧЕСКИХ ЗАДАЧ.
До Аристотеля (384 –
РАЗВИТИЕ МЕХАНИКИ СВЯЗАНО С РАСШИРЕНИЕМ КРУГА РЕШАЕМЫХ ПРАКТИЧЕСКИХ ЗАДАЧ.
До Аристотеля (384 –
Слайд 6МОДЕЛИРОВАНИЕ – ГЛАВНОЕ НАПРАВЛЕНИЕ РАЗВИТИЯ ТМ
Общим во всех этих умениях является умение
МОДЕЛИРОВАНИЕ – ГЛАВНОЕ НАПРАВЛЕНИЕ РАЗВИТИЯ ТМ
Общим во всех этих умениях является умение
Слайд 7АБСТРАКТНЫЕ МОДЕЛИ РЕАЛЬНЫХ ТЕЛ
В теоретической механике изучается движение одних тел относительно других
АБСТРАКТНЫЕ МОДЕЛИ РЕАЛЬНЫХ ТЕЛ
В теоретической механике изучается движение одних тел относительно других
Слайд 8ОСНОВНЫЕ АБСТРАКТНЫЕ МОДЕЛИ РЕАЛЬНЫХ ТЕЛ
1.Материальная точка – тело, размерами которого можно пренебречь
ОСНОВНЫЕ АБСТРАКТНЫЕ МОДЕЛИ РЕАЛЬНЫХ ТЕЛ
1.Материальная точка – тело, размерами которого можно пренебречь
Слайд 9ВЫРОЖДЕННЫЕ МОДЕЛИ
бесконечно тонкий стержень – стержень, который «работает» только на растяжение и
ВЫРОЖДЕННЫЕ МОДЕЛИ
бесконечно тонкий стержень – стержень, который «работает» только на растяжение и
Слайд 10СВОЙСТВА ПРОСТРАНСТВА
(для идеальных условий)
Свойства пространства были постулированы при решении задач астрономии,
СВОЙСТВА ПРОСТРАНСТВА
(для идеальных условий)
Свойства пространства были постулированы при решении задач астрономии,
Слайд 11СВОЙСТВА ПРОСТРАНСТВА
(для реальных условий)
При решении задач в реальных условиях учитывается не
СВОЙСТВА ПРОСТРАНСТВА
(для реальных условий)
При решении задач в реальных условиях учитывается не
Слайд 12СИСТЕМЫ ОТСЧЁТА
Свойства системы отсчёта (неоднородность и анизотропность) затрудняют наблюдение за движением тела.
Практически
СИСТЕМЫ ОТСЧЁТА
Свойства системы отсчёта (неоднородность и анизотропность) затрудняют наблюдение за движением тела.
Практически
Слайд 13ИНЕРЦИАЛЬНАЯ СИСТЕМА ОТСЧЁТА
Инерциальная система отсчёта – такая, собственное движение которой не может
ИНЕРЦИАЛЬНАЯ СИСТЕМА ОТСЧЁТА
Инерциальная система отсчёта – такая, собственное движение которой не может
Слайд 14.
Реальные тела взаимодействуют.
Сила – мера механического взаимодействия тел.
При взаимодействии меняется
.
Реальные тела взаимодействуют.
Сила – мера механического взаимодействия тел.
При взаимодействии меняется
Слайд 15ИДЕОЛОГИЯ И ПРИНЦИПЫ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Идеология ТМ
От простого к сложному
Принципы ТМ
В основе –
ИДЕОЛОГИЯ И ПРИНЦИПЫ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Идеология ТМ
От простого к сложному
Принципы ТМ
В основе –
Слайд 16статика
Статика (от греч. στατικε - неподвижное) – раздел теоретической механики, в котором
статика
Статика (от греч. στατικε - неподвижное) – раздел теоретической механики, в котором
Слайд 17МОДЕЛИ, ИСПОЛЬЗУЕМЫЕ
В СТАТИКЕ
1. Материальная точка – геометрическая точка с массой;
2. Абсолютно
МОДЕЛИ, ИСПОЛЬЗУЕМЫЕ
В СТАТИКЕ
1. Материальная точка – геометрическая точка с массой;
2. Абсолютно
Слайд 18ОПЕРАЦИИ С ВЕКТОРАМИ
1.Сложение векторов.
2.Вычитание векторов.
3.Умножение вектора на скаляр.
4.Проецирование вектора на декартовые оси.
5.Выражение
ОПЕРАЦИИ С ВЕКТОРАМИ
1.Сложение векторов.
2.Вычитание векторов.
3.Умножение вектора на скаляр.
4.Проецирование вектора на декартовые оси.
5.Выражение
Слайд 19ПЕРВАЯ АКСИОМА СТАТИКИ
Из повседневного опыта: силы имеют векторный характер, то есть величину,
ПЕРВАЯ АКСИОМА СТАТИКИ
Из повседневного опыта: силы имеют векторный характер, то есть величину,
Слайд 20Вторая и третья аксиомы
Аксиома 2. Две силы, приложенные к твёрдому телу, взаимно
Вторая и третья аксиомы
Аксиома 2. Две силы, приложенные к твёрдому телу, взаимно
Слайд 21Две категории сил
.
Рис. 5.
1) Активные – создают или способны создать движение твёрдого
Две категории сил
.
Рис. 5.
1) Активные – создают или способны создать движение твёрдого
Слайд 22АКСИОМЫ СТАТИКИ
(ПРОДОЛЖЕНИЕ)
Четвёртая аксиома
Действие одного тела на второе равно и противоположно действию этого
АКСИОМЫ СТАТИКИ
(ПРОДОЛЖЕНИЕ)
Четвёртая аксиома
Действие одного тела на второе равно и противоположно действию этого
Слайд 23СВЯЗИ И РЕАКЦИИ
Связи – тела, ограничивающие движение данного тела.
Это определение сформулировано
СВЯЗИ И РЕАКЦИИ
Связи – тела, ограничивающие движение данного тела.
Это определение сформулировано
Слайд 24СХЕМЫ СВЯЗЕЙ
.
СХЕМЫ СВЯЗЕЙ
.

Слайд 25СХЕМЫ СВЯЗЕЙ ПРОДОЛЖЕНИЕ
.
СХЕМЫ СВЯЗЕЙ ПРОДОЛЖЕНИЕ
.

Слайд 26СХЕМЫ СВЯЗЕЙ (ОКОНЧАНИЕ)
.
СХЕМЫ СВЯЗЕЙ (ОКОНЧАНИЕ)
.

Слайд 27АНАЛИТИЧЕСКОЕ ВЫРАЖЕНИЕ СВЯЗИ
Схема связи
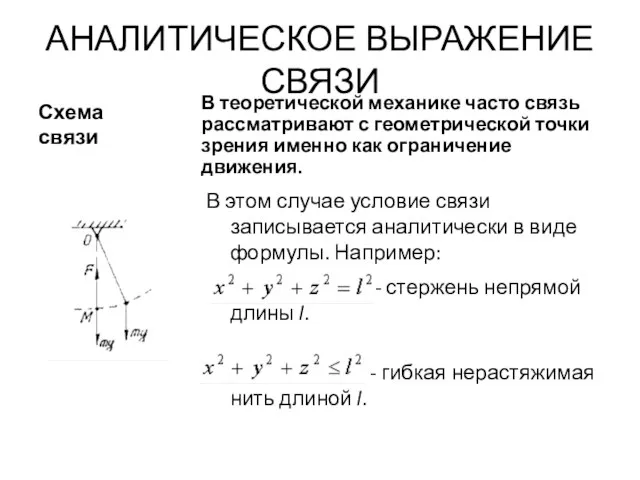
В теоретической механике часто связь рассматривают с геометрической точки
АНАЛИТИЧЕСКОЕ ВЫРАЖЕНИЕ СВЯЗИ
Схема связи
В теоретической механике часто связь рассматривают с геометрической точки
Слайд 28СИСТЕМА СХОДЯЩИХСЯ СИЛ (ССС)
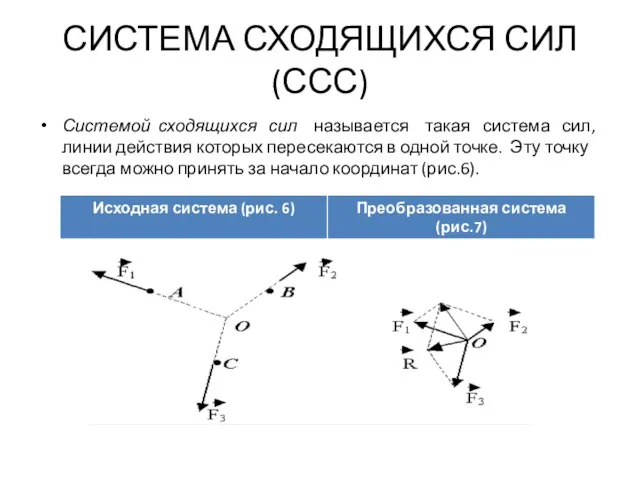
Системой сходящихся сил называется такая система сил, линии действия которых
СИСТЕМА СХОДЯЩИХСЯ СИЛ (ССС)
Системой сходящихся сил называется такая система сил, линии действия которых
Слайд 29Приведение ССС к равнодействующей
Исходную систему сходящихся сил (рис. 6) можно преобразовать.
Приведение ССС к равнодействующей
Исходную систему сходящихся сил (рис. 6) можно преобразовать.
Слайд 30РАВНОДЕЙСТВУЮЩАЯ ССС
Проекции равнодействующей
.
Условия равновесия ССС
или
РАВНОДЕЙСТВУЮЩАЯ ССС
Проекции равнодействующей
.
Условия равновесия ССС
или
Слайд 31ТЕОРЕМА О ТРЁХ СИЛАХ
Если на твёрдое тело действуют три силы, и линии
ТЕОРЕМА О ТРЁХ СИЛАХ
Если на твёрдое тело действуют три силы, и линии
Слайд 32
ПРИМЕРЫ НА ТЕОРЕМУ О ТРЁХ СИЛАХ
.
.
Задача 1. Груз M1 весом P (рис.
ПРИМЕРЫ НА ТЕОРЕМУ О ТРЁХ СИЛАХ
.
.
Задача 1. Груз M1 весом P (рис.
Слайд 33РЕШЕНИЕ ЗАДАЧИ 1
.
.
Решим эту задачу двумя способами: геометрическим и аналитическим.
Геометрический способ. Так
РЕШЕНИЕ ЗАДАЧИ 1
.
.
Решим эту задачу двумя способами: геометрическим и аналитическим.
Геометрический способ. Так
Слайд 34АНАЛИТИЧЕСКИЙ СПОСОБ
.
.
Выберем оси координат так, чтобы они совпадали с максимумом действующих сил,
АНАЛИТИЧЕСКИЙ СПОСОБ
.
.
Выберем оси координат так, чтобы они совпадали с максимумом действующих сил,
Слайд 35Задача 2
Однородный цилиндр A весом P и радиусом r (рис. 12) опирается
Задача 2
Однородный цилиндр A весом P и радиусом r (рис. 12) опирается
Слайд 36СЛОЖЕНИЕ ДВУХ ПАРАЛЛЕЛЬНЫХ СИЛ
Силы направлены в одну сторону (рис. 15)
.
Силы направлены в
СЛОЖЕНИЕ ДВУХ ПАРАЛЛЕЛЬНЫХ СИЛ
Силы направлены в одну сторону (рис. 15)
.
Силы направлены в

Слайд 37ПАРА СИЛ
.
.
Пара сил - система двух равных по модулю, параллельных и противоположно
ПАРА СИЛ
.
.
Пара сил - система двух равных по модулю, параллельных и противоположно
Слайд 38МОМЕНТ ПАРЫ СИЛ
Момент пары в пространстве
. Момент пары сил изображают вектором. Вектор
МОМЕНТ ПАРЫ СИЛ
Момент пары в пространстве
. Момент пары сил изображают вектором. Вектор

Слайд 39ТЕОРЕМЫ О ПАРАХ
Теорема 1 . Две пары сил лежащие в одной плоскости,
ТЕОРЕМЫ О ПАРАХ
Теорема 1 . Две пары сил лежащие в одной плоскости,
Слайд 40ТРЕТЬЯ ТЕОРЕМА О ПАРАХ
Теорема 3 . Две пары сил можно заменять одной
ТРЕТЬЯ ТЕОРЕМА О ПАРАХ
Теорема 3 . Две пары сил можно заменять одной
Слайд 41Момент силы
относительно точки на плоскости
.
.
. Линия действия силы - это
Момент силы
относительно точки на плоскости
.
.
. Линия действия силы - это
Слайд 42АЛГЕБРАИЧЕСКИЙ МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
Пример 1
Пример 2
Алгебраический момент силы относительно точки -
АЛГЕБРАИЧЕСКИЙ МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ
Пример 1
Пример 2
Алгебраический момент силы относительно точки -
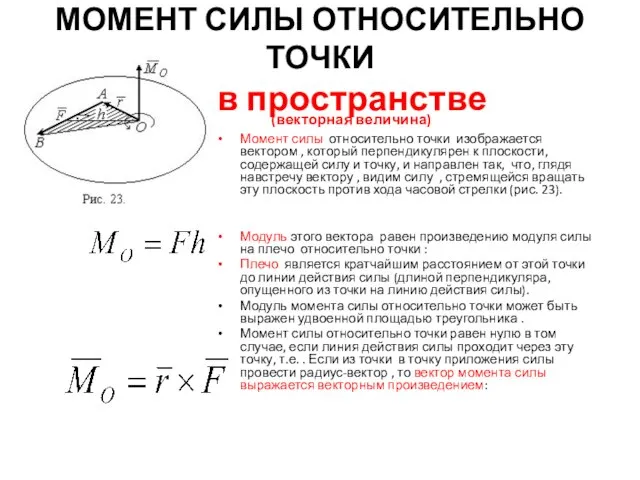
Слайд 43МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ в пространстве
.
(векторная величина)
Момент силы относительно точки изображается вектором
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ в пространстве
.
(векторная величина)
Момент силы относительно точки изображается вектором
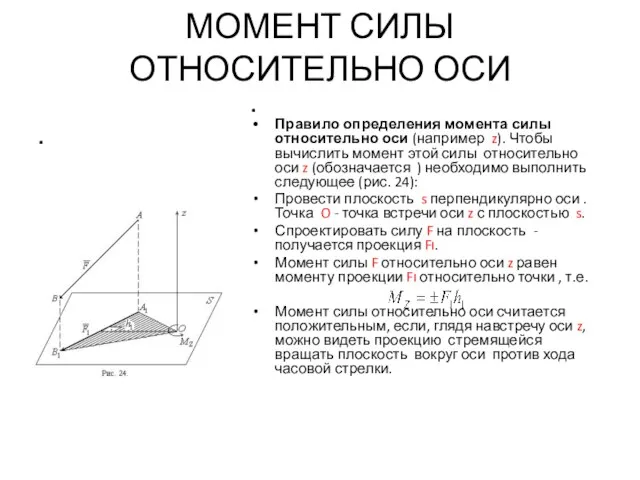
Слайд 44МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ
.
.
Правило определения момента силы относительно оси (например z). Чтобы
МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ОСИ
.
.
Правило определения момента силы относительно оси (например z). Чтобы
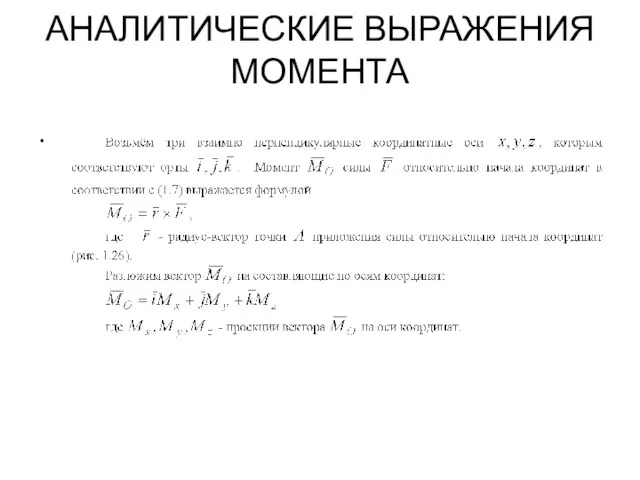
Слайд 45АНАЛИТИЧЕСКИЕ ВЫРАЖЕНИЯ МОМЕНТА
.
АНАЛИТИЧЕСКИЕ ВЫРАЖЕНИЯ МОМЕНТА
.
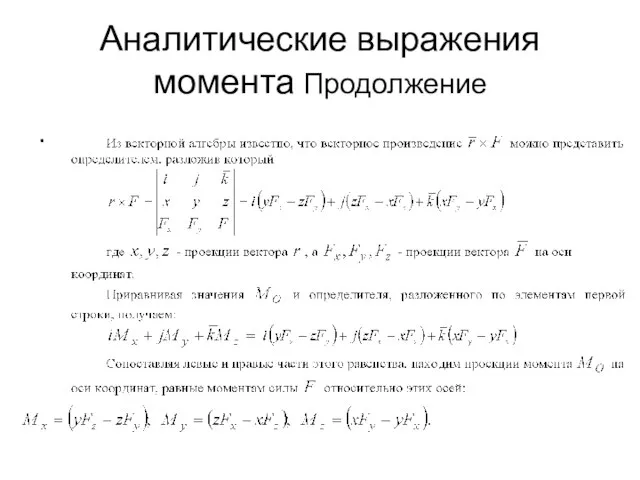
Слайд 46Аналитические выражения момента Продолжение
.
Аналитические выражения момента Продолжение
.
Слайд 47Пример на вычисление
момента силы относительно осей
.
Пример на вычисление
момента силы относительно осей
.
Слайд 48ЛЕММА ПУАНСО
(лемма о параллельном переносе силы)
.
ЛЕММА ПУАНСО
(лемма о параллельном переносе силы)
.
Слайд 49Основная теорема статики
(теорема Пуансо)
.
Основная теорема статики
(теорема Пуансо)
.
Слайд 50ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
(доказательство)
.
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ
(доказательство)
.
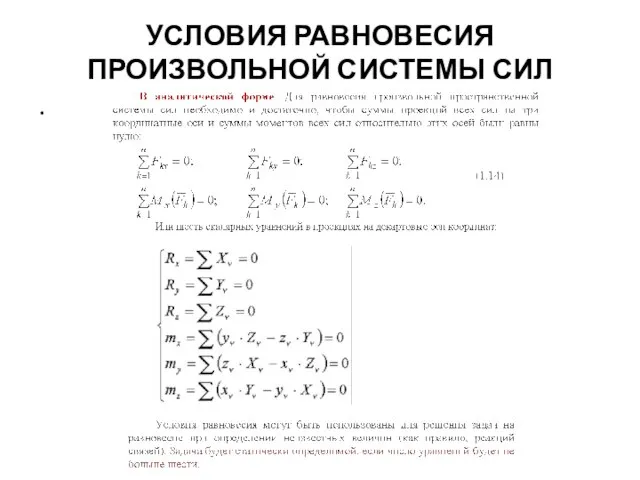
Слайд 51УСЛОВИЯ РАВНОВЕСИЯ
ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
.
УСЛОВИЯ РАВНОВЕСИЯ
ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
.
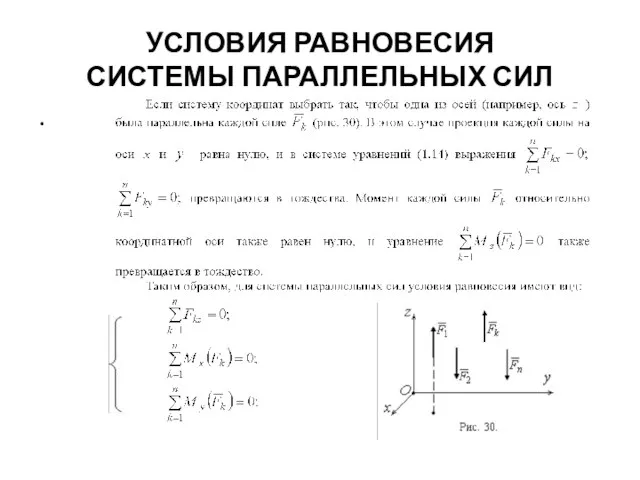
Слайд 52УСЛОВИЯ РАВНОВЕСИЯ
СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
.
УСЛОВИЯ РАВНОВЕСИЯ
СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
.
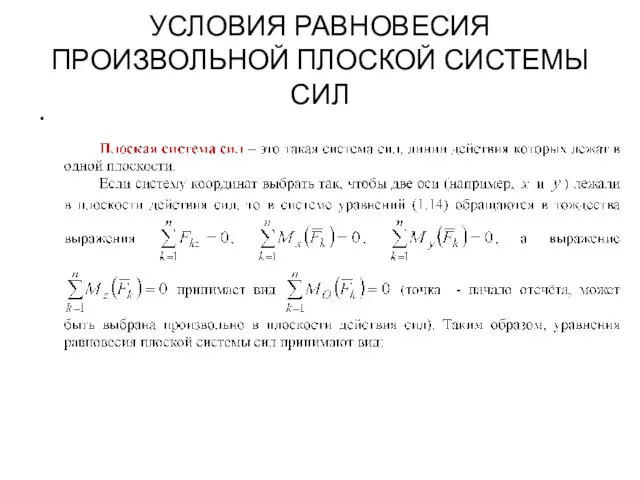
Слайд 53УСЛОВИЯ РАВНОВЕСИЯ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ
.
УСЛОВИЯ РАВНОВЕСИЯ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ
.
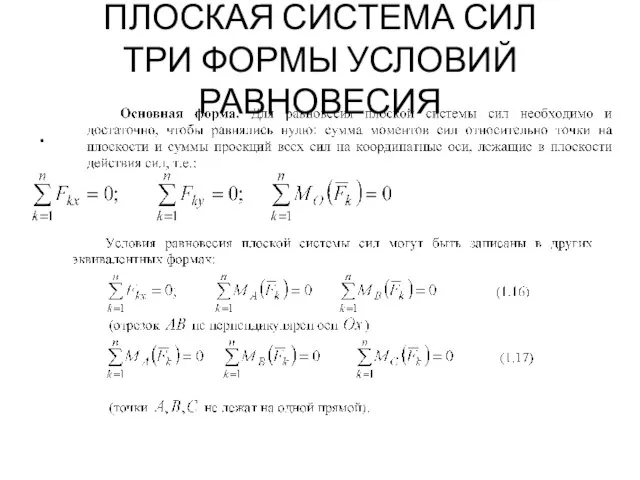
Слайд 54ПЛОСКАЯ СИСТЕМА СИЛ
ТРИ ФОРМЫ УСЛОВИЙ РАВНОВЕСИЯ
.
ПЛОСКАЯ СИСТЕМА СИЛ
ТРИ ФОРМЫ УСЛОВИЙ РАВНОВЕСИЯ
.
Слайд 55ЦЕНТР ТЯЖЕСТИ
.
ЦЕНТР ТЯЖЕСТИ
.
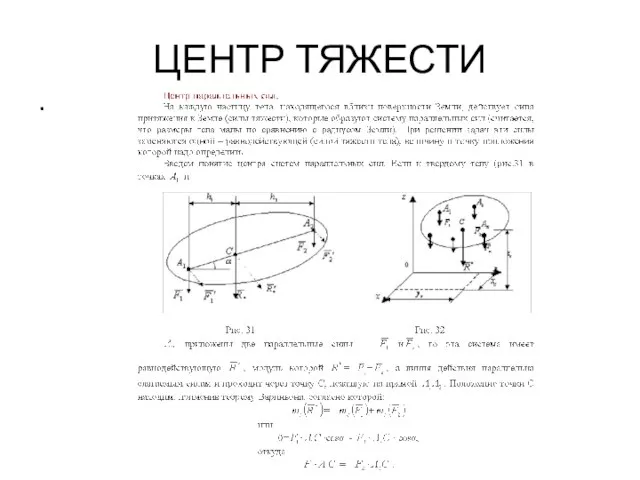
Слайд 56ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
.
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
.
Слайд 57ОПРЕДЕЛЕНИЕ КООРДИНАТ ЦЕНТРА ПАРАЛЛЕЛЬНЫХ СИЛ
.
ОПРЕДЕЛЕНИЕ КООРДИНАТ ЦЕНТРА ПАРАЛЛЕЛЬНЫХ СИЛ
.
Слайд 58КООРДИНАТЫ ЦЕНТРА ТЯЖЕСТИ
.
КООРДИНАТЫ ЦЕНТРА ТЯЖЕСТИ
.
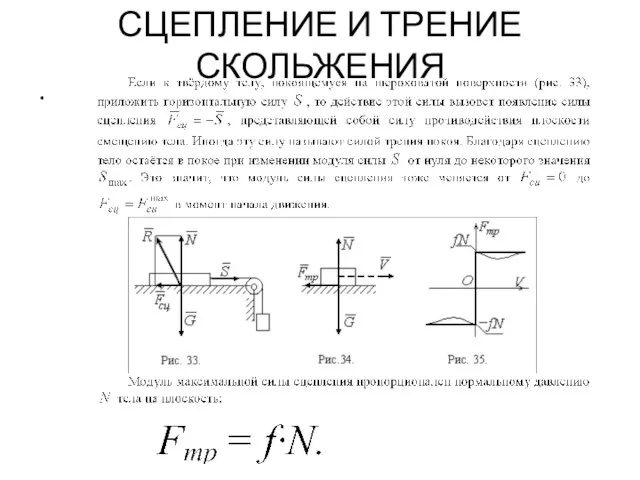
Слайд 59СЦЕПЛЕНИЕ И ТРЕНИЕ СКОЛЬЖЕНИЯ
.
СЦЕПЛЕНИЕ И ТРЕНИЕ СКОЛЬЖЕНИЯ
.
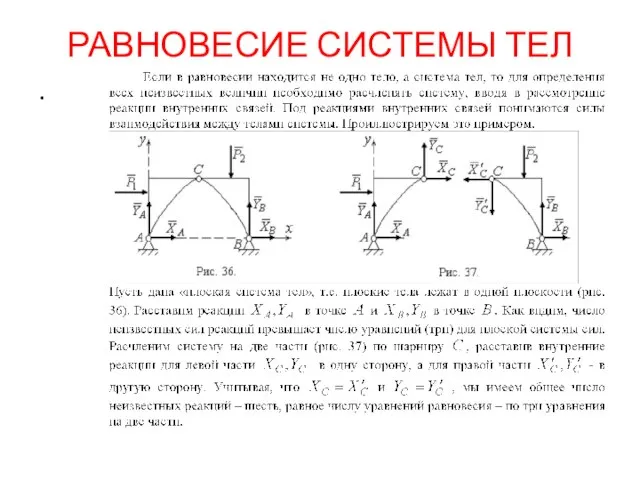
Слайд 60РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
.
РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
.
Слайд 61РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
(продолжение)
.
РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
(продолжение)
.
Слайд 62СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ СИСТЕМЫ
Статически определимые системы – это такие системы тел, в которых
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ СИСТЕМЫ
Статически определимые системы – это такие системы тел, в которых
Слайд 63КОНТРОЛЬНЫЕ ВОПРОСЫ ПО СТАТИКЕ
1. Назовите основные модели реальных тел в теоретической механике.
2.
КОНТРОЛЬНЫЕ ВОПРОСЫ ПО СТАТИКЕ
1. Назовите основные модели реальных тел в теоретической механике.
2.
Слайд 64Соколов А.П.
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
(часть 2)
для студентов ЭНИН
направления 140100
ТЕПЛОЭНЕРГЕТИКА
Соколов А.П.
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
(часть 2)
для студентов ЭНИН
направления 140100
ТЕПЛОЭНЕРГЕТИКА
Слайд 65КИНЕМАТИКА
Кинематика – раздел теоретической механики, в котором изучается движение тел без учёта
КИНЕМАТИКА
Кинематика – раздел теоретической механики, в котором изучается движение тел без учёта
Слайд 66КИНЕМАТИКА ТОЧКИ
Декартовы координаты.
С неподвижной системой отсчёта связываем декартовую ортогональную систему координат (правую,
КИНЕМАТИКА ТОЧКИ
Декартовы координаты.
С неподвижной системой отсчёта связываем декартовую ортогональную систему координат (правую,
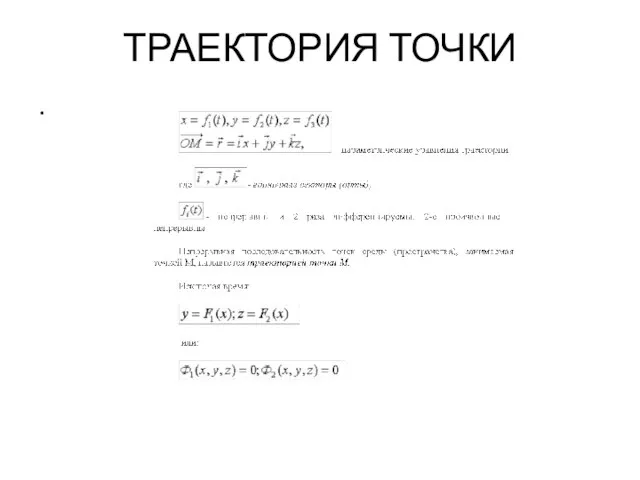
Слайд 67ТРАЕКТОРИЯ ТОЧКИ
.
ТРАЕКТОРИЯ ТОЧКИ
.
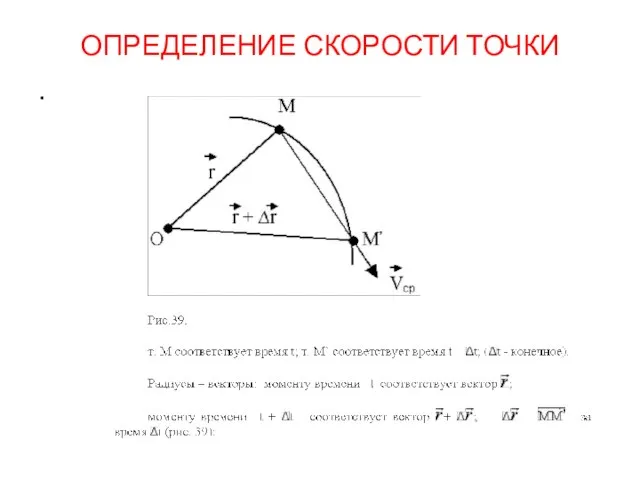
Слайд 68ОПРЕДЕЛЕНИЕ СКОРОСТИ ТОЧКИ
.
ОПРЕДЕЛЕНИЕ СКОРОСТИ ТОЧКИ
.
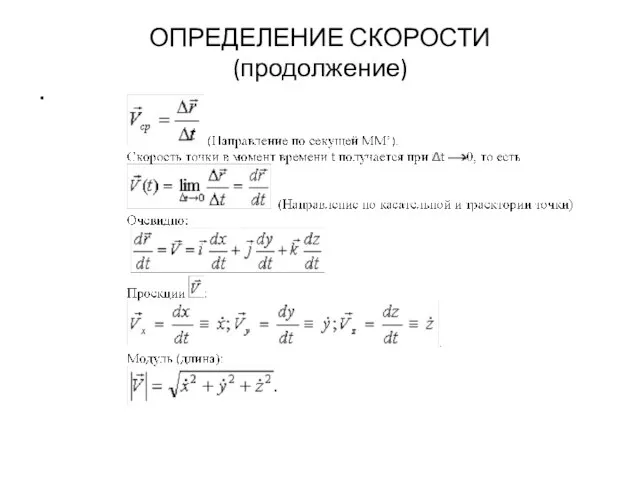
Слайд 69ОПРЕДЕЛЕНИЕ СКОРОСТИ
(продолжение)
.
ОПРЕДЕЛЕНИЕ СКОРОСТИ
(продолжение)
.
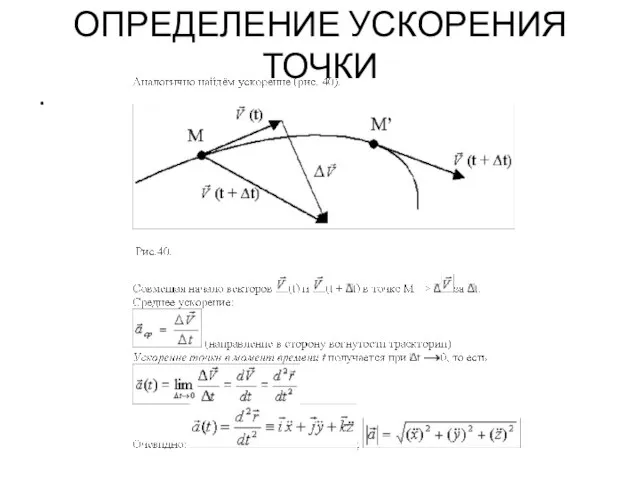
Слайд 70ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ ТОЧКИ
.
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ ТОЧКИ
.
Слайд 71УСКОРЕНИЕ ТОЧКИ
(продолжение)
.
УСКОРЕНИЕ ТОЧКИ
(продолжение)
.
Слайд 72ОПРЕДЕЛЕНИЕ СКОРОСТИ И УСКОРЕНИЯ В ПОЛЯРНЫХ КООРДИНАТАХ
.
ОПРЕДЕЛЕНИЕ СКОРОСТИ И УСКОРЕНИЯ В ПОЛЯРНЫХ КООРДИНАТАХ
.
Слайд 73(продолжение)
.
.
.
.
(продолжение)
.
.
.
.
Слайд 74ОКОНЧАНИЕ
Проекции скорости:
Проекции ускорения:
ОКОНЧАНИЕ
Проекции скорости:
Проекции ускорения:
Слайд 75ЕСТЕСТВЕННЫЕ КООРДИНАТНЫЕ ОСИ
(ВВЕДЕНИЕ ПОНЯТИЯ)
.
ЕСТЕСТВЕННЫЕ КООРДИНАТНЫЕ ОСИ
(ВВЕДЕНИЕ ПОНЯТИЯ)
.
Слайд 76ЕСТЕСТВЕННЫЕ КООРДИНАТНЫЕ ОСИ
.
ЕСТЕСТВЕННЫЕ КООРДИНАТНЫЕ ОСИ
.
Слайд 77ПРОЕКЦИИ СКОРОСТИ
НА ЕСТЕСТВЕННЫЕ ОСИ
.
ПРОЕКЦИИ СКОРОСТИ
НА ЕСТЕСТВЕННЫЕ ОСИ
.
Слайд 78ПРОЕКЦИЯ УСКОРЕНИЯ
НА ЕСТЕСТВЕННЫЕ ОСИ
.
ПРОЕКЦИЯ УСКОРЕНИЯ
НА ЕСТЕСТВЕННЫЕ ОСИ
.
Слайд 79ИЛЛЮСТРАЦИЯ ПРОЕКЦИИ СКОРОСТЕЙ И УСКОРЕНИЙ
.
ИЛЛЮСТРАЦИЯ ПРОЕКЦИИ СКОРОСТЕЙ И УСКОРЕНИЙ
.
Слайд 80Задача
.
Задача
.
Слайд 81КИНЕМАТИКА ТЕЛА
.
КИНЕМАТИКА ТЕЛА
.
Слайд 82ВЗАИМОСВЯЗЬ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОСЕЙ
.
ВЗАИМОСВЯЗЬ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОСЕЙ
.
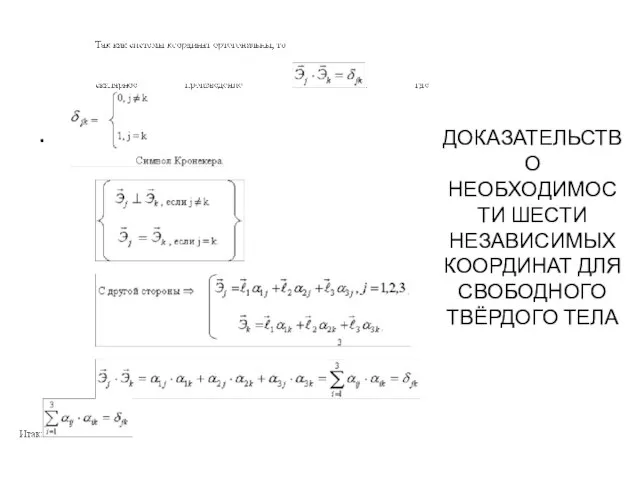
Слайд 83ДОКАЗАТЕЛЬСТВО НЕОБХОДИМОСТИ ШЕСТИ НЕЗАВИСИМЫХ КООРДИНАТ ДЛЯ СВОБОДНОГО ТВЁРДОГО ТЕЛА
.
ДОКАЗАТЕЛЬСТВО НЕОБХОДИМОСТИ ШЕСТИ НЕЗАВИСИМЫХ КООРДИНАТ ДЛЯ СВОБОДНОГО ТВЁРДОГО ТЕЛА
.
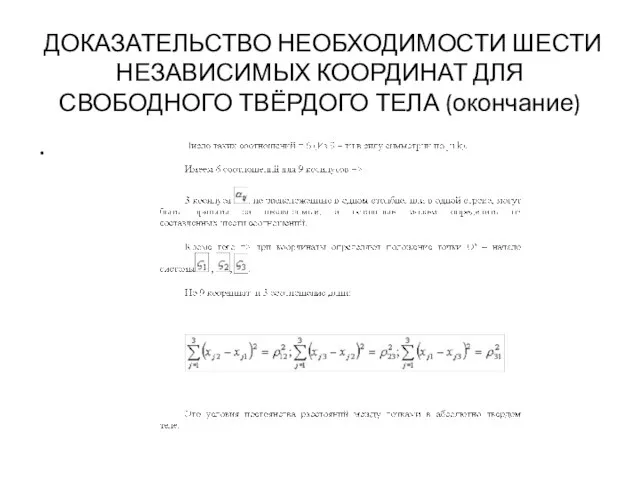
Слайд 84ДОКАЗАТЕЛЬСТВО НЕОБХОДИМОСТИ ШЕСТИ НЕЗАВИСИМЫХ КООРДИНАТ ДЛЯ СВОБОДНОГО ТВЁРДОГО ТЕЛА (окончание)
.
ДОКАЗАТЕЛЬСТВО НЕОБХОДИМОСТИ ШЕСТИ НЕЗАВИСИМЫХ КООРДИНАТ ДЛЯ СВОБОДНОГО ТВЁРДОГО ТЕЛА (окончание)
.
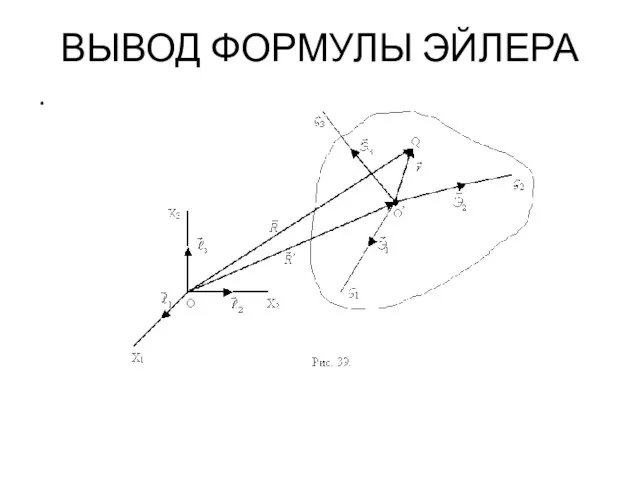
Слайд 85ВЫВОД ФОРМУЛЫ ЭЙЛЕРА
.
ВЫВОД ФОРМУЛЫ ЭЙЛЕРА
.
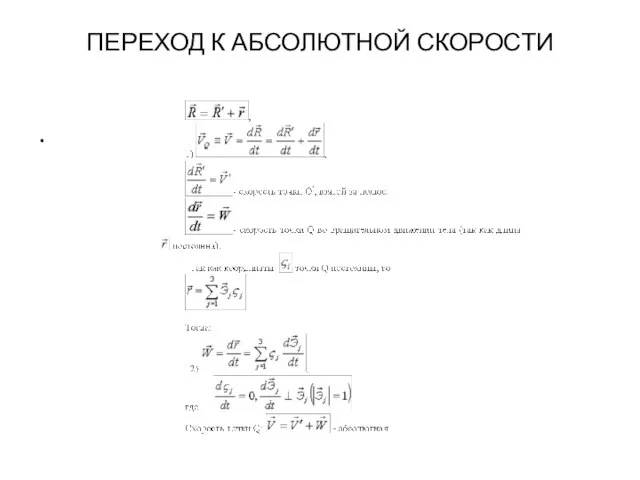
Слайд 86ПЕРЕХОД К АБСОЛЮТНОЙ СКОРОСТИ
.
ПЕРЕХОД К АБСОЛЮТНОЙ СКОРОСТИ
.
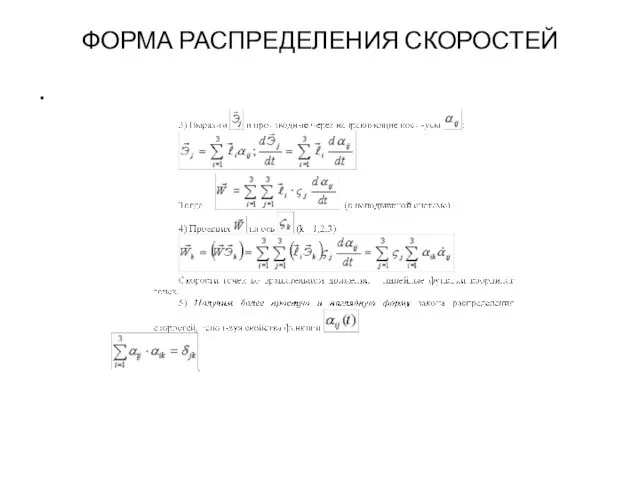
Слайд 87ФОРМА РАСПРЕДЕЛЕНИЯ СКОРОСТЕЙ
.
ФОРМА РАСПРЕДЕЛЕНИЯ СКОРОСТЕЙ
.
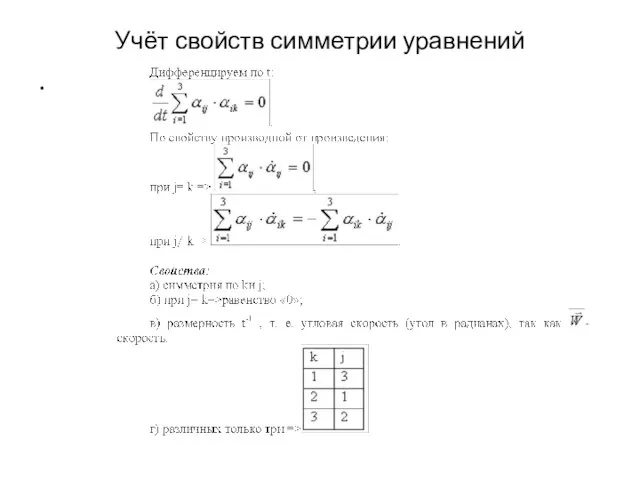
Слайд 88Учёт свойств симметрии уравнений
.
Учёт свойств симметрии уравнений
.
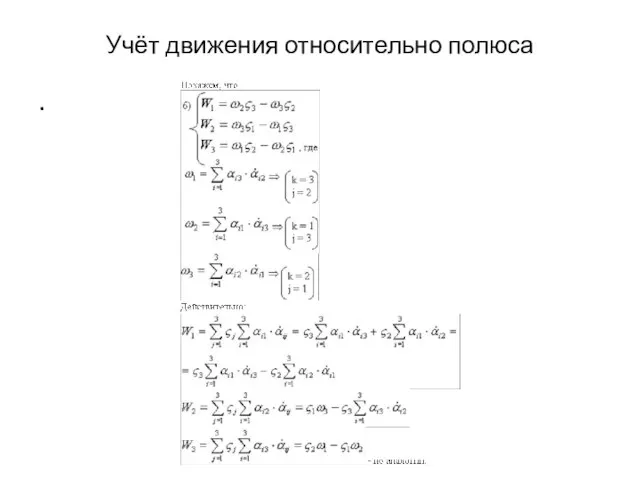
Слайд 89Учёт движения относительно полюса
.
Учёт движения относительно полюса
.
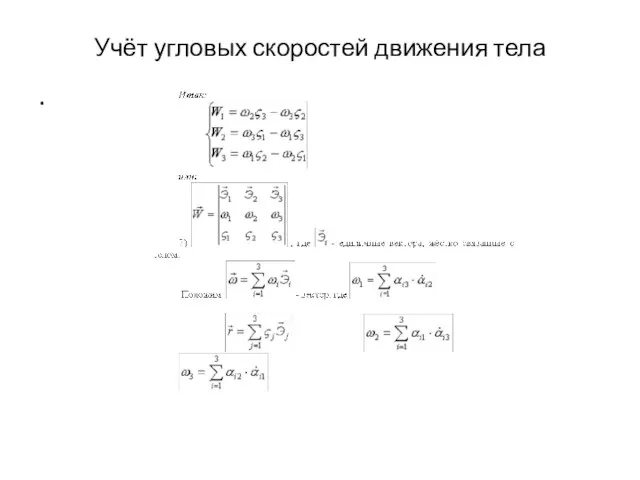
Слайд 90Учёт угловых скоростей движения тела
.
Учёт угловых скоростей движения тела
.
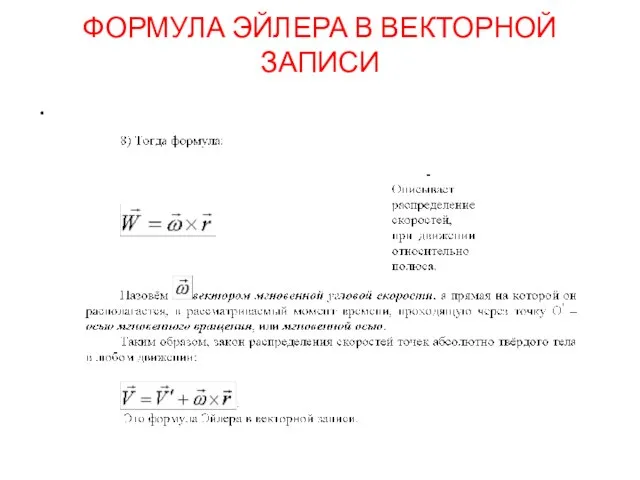
Слайд 91ФОРМУЛА ЭЙЛЕРА В ВЕКТОРНОЙ ЗАПИСИ
.
ФОРМУЛА ЭЙЛЕРА В ВЕКТОРНОЙ ЗАПИСИ
.
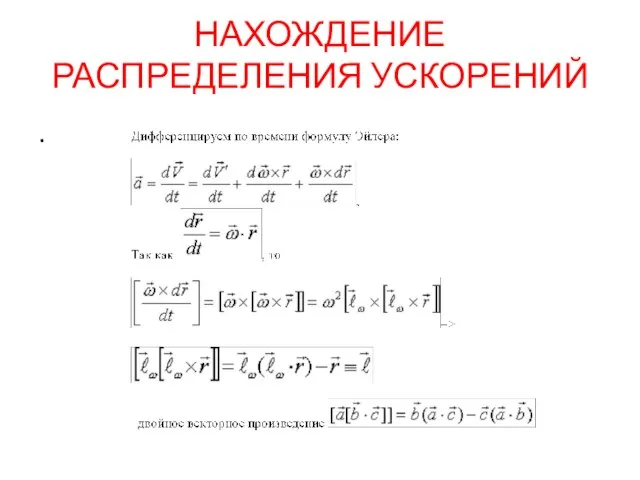
Слайд 92НАХОЖДЕНИЕ РАСПРЕДЕЛЕНИЯ УСКОРЕНИЙ
.
НАХОЖДЕНИЕ РАСПРЕДЕЛЕНИЯ УСКОРЕНИЙ
.
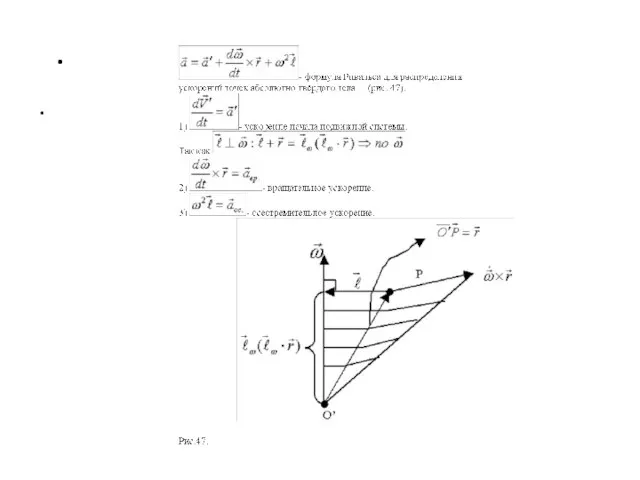
Слайд 93.
.
.
.
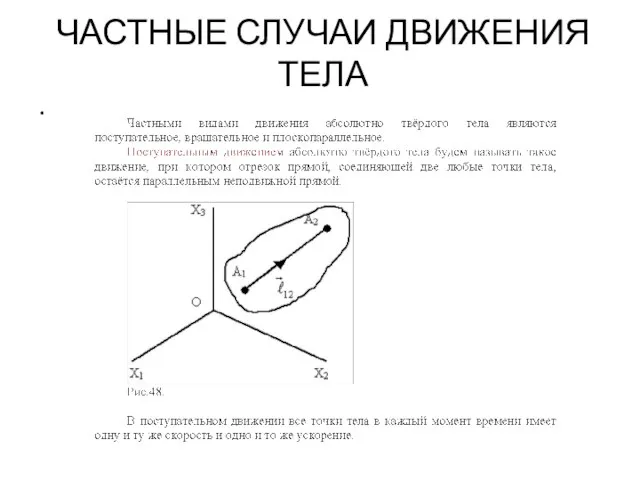
Слайд 94ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТЕЛА
.
ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТЕЛА
.
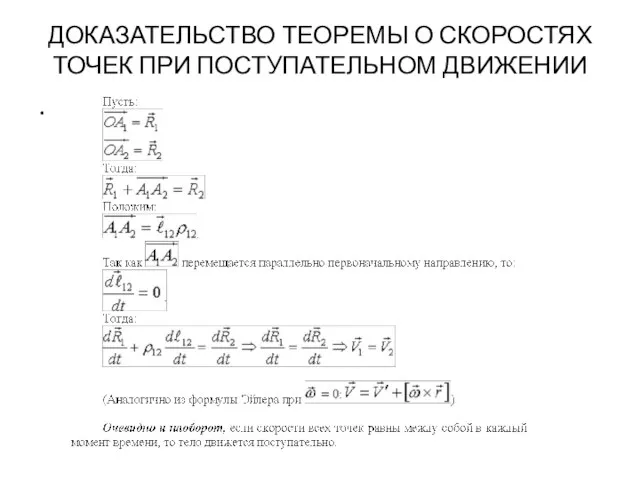
Слайд 95ДОКАЗАТЕЛЬСТВО ТЕОРЕМЫ О СКОРОСТЯХ ТОЧЕК ПРИ ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ
.
ДОКАЗАТЕЛЬСТВО ТЕОРЕМЫ О СКОРОСТЯХ ТОЧЕК ПРИ ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ
.
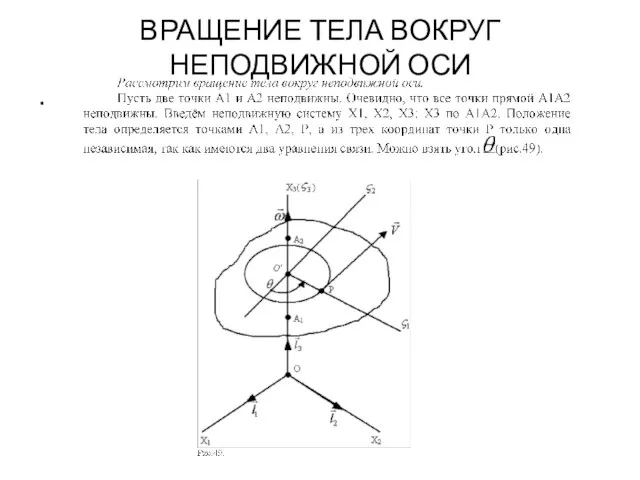
Слайд 96ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
.
ВРАЩЕНИЕ ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
.
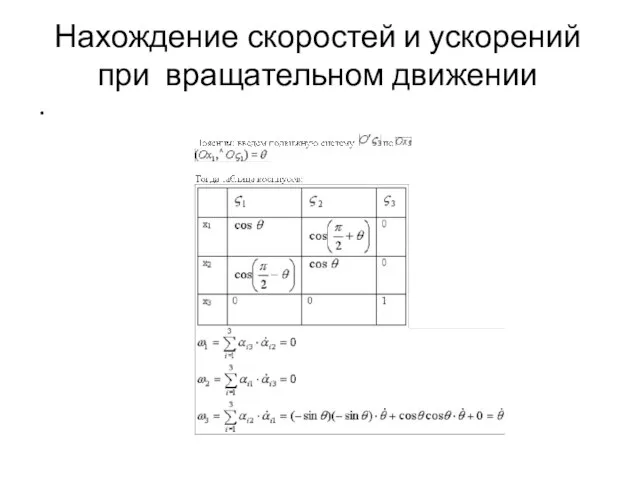
Слайд 97Нахождение скоростей и ускорений при вращательном движении
.
Нахождение скоростей и ускорений при вращательном движении
.
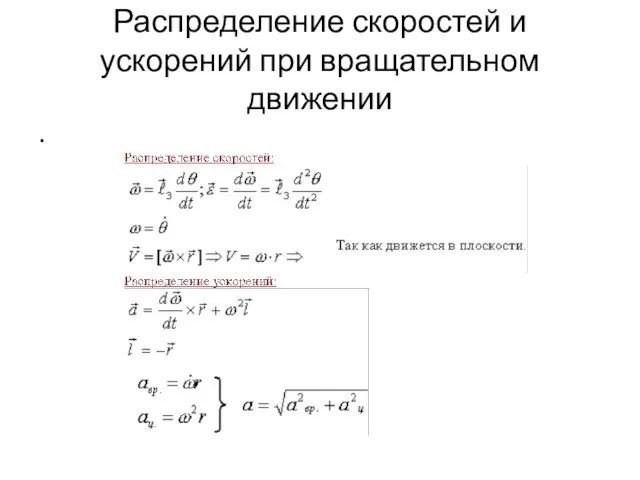
Слайд 98Распределение скоростей и ускорений при вращательном движении
.
Распределение скоростей и ускорений при вращательном движении
.
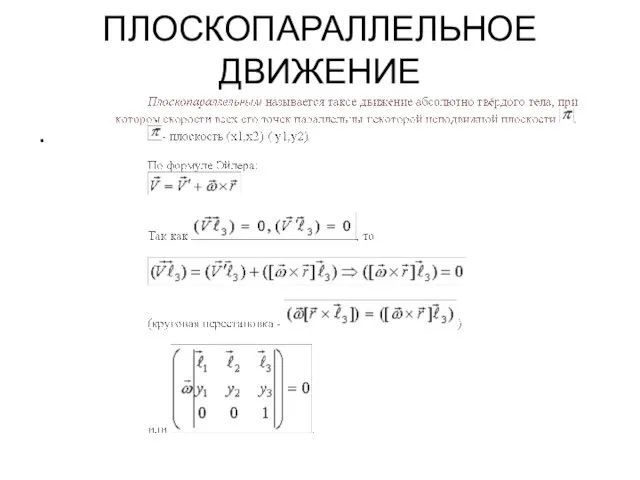
Слайд 99ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ
.
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ
.
Слайд 100ИЛЛЮСТРАЦИЯ ПЛОСКОПАРАЛЛЕЛЬНОГО ДВИЖЕНИЯ
.
ИЛЛЮСТРАЦИЯ ПЛОСКОПАРАЛЛЕЛЬНОГО ДВИЖЕНИЯ
.

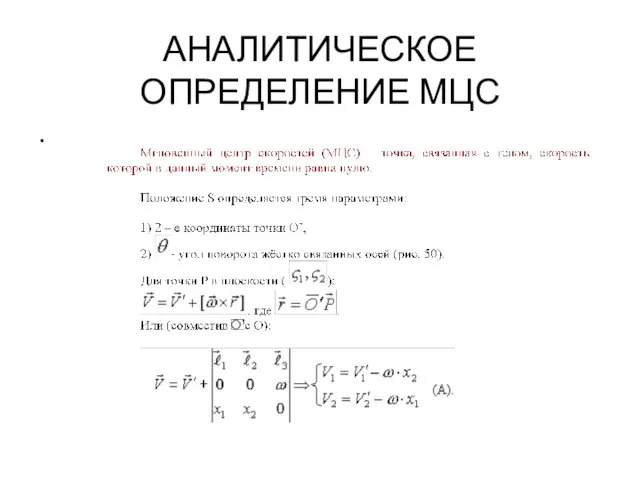
Слайд 101АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ МЦС
.
АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ МЦС
.
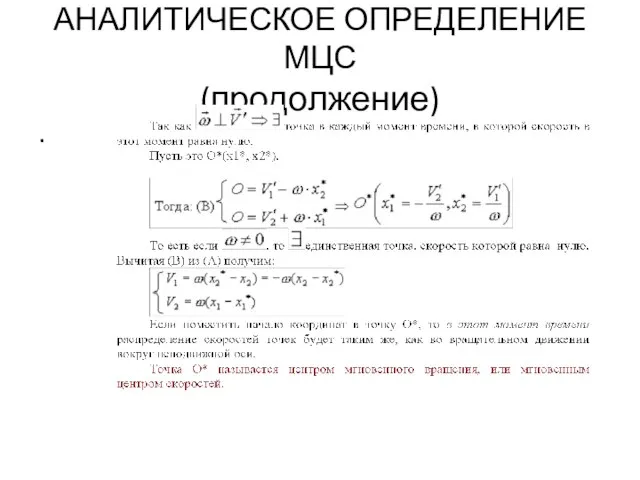
Слайд 102АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ МЦС
(продолжение)
.
АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ МЦС
(продолжение)
.
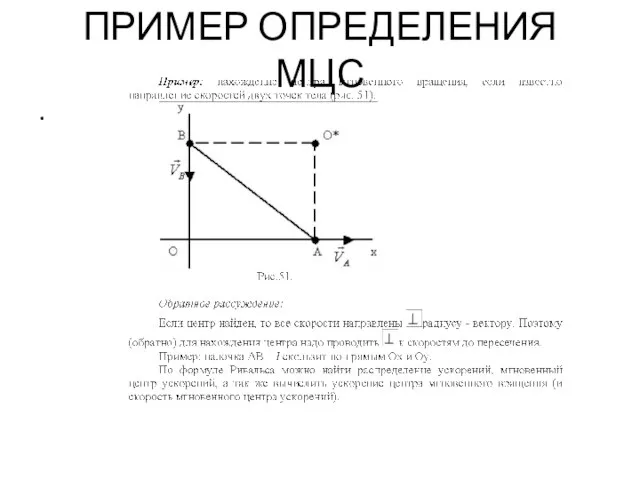
Слайд 103ПРИМЕР ОПРЕДЕЛЕНИЯ МЦС
.
ПРИМЕР ОПРЕДЕЛЕНИЯ МЦС
.
Слайд 104Сложное движение точки
.
Сложное движение точки
.

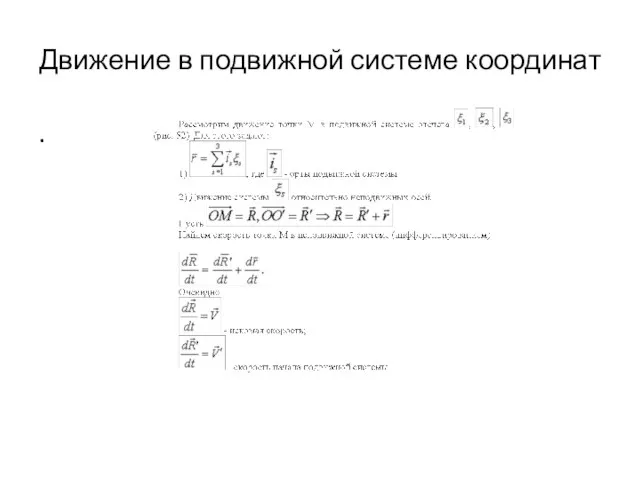
Слайд 105Движение в подвижной системе координат
.
Движение в подвижной системе координат
.
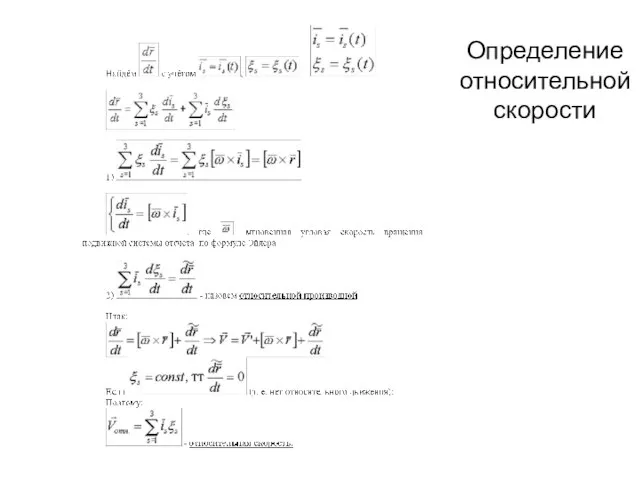
Слайд 106Определение относительной скорости
Определение относительной скорости
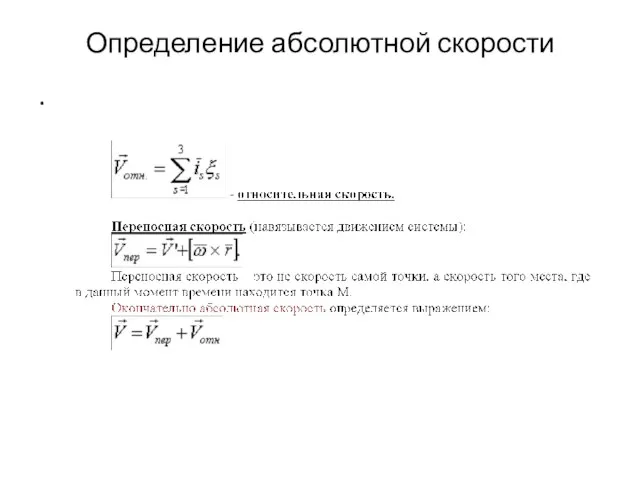
Слайд 107Определение абсолютной скорости
.
Определение абсолютной скорости
.
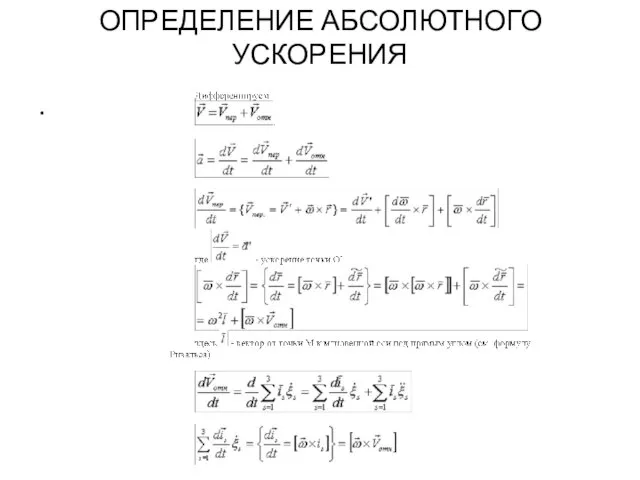
Слайд 108ОПРЕДЕЛЕНИЕ АБСОЛЮТНОГО УСКОРЕНИЯ
.
ОПРЕДЕЛЕНИЕ АБСОЛЮТНОГО УСКОРЕНИЯ
.
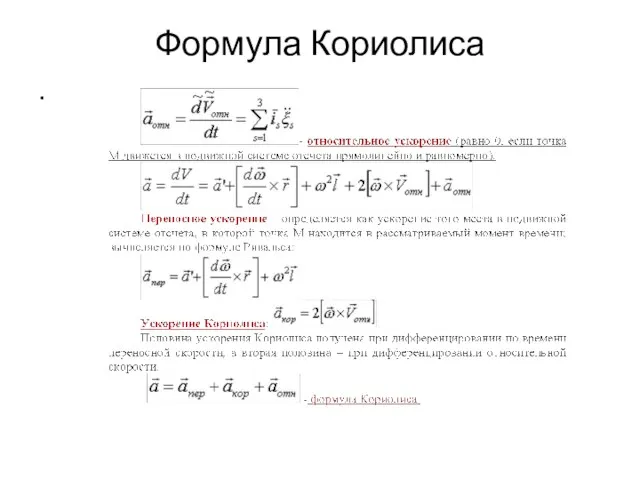
Слайд 109Формула Кориолиса
.
Формула Кориолиса
.

Слайд 111Соколов А.П.
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
(часть 3)
для студентов ЭНИН
направления 140100
ТЕПЛОЭНЕРГЕТИКА
Соколов А.П.
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
(часть 3)
для студентов ЭНИН
направления 140100
ТЕПЛОЭНЕРГЕТИКА
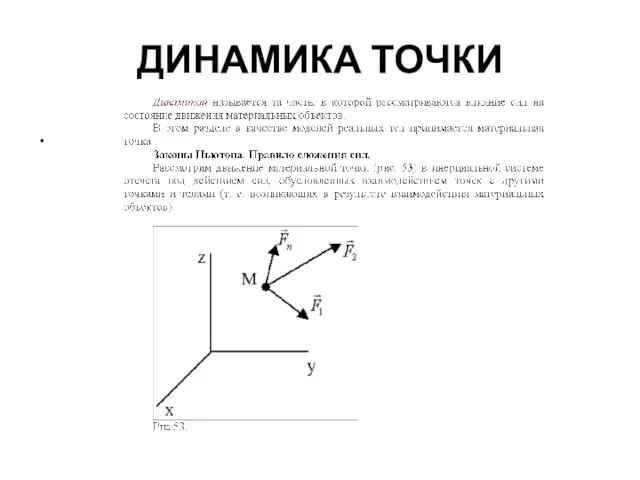
Слайд 112ДИНАМИКА ТОЧКИ
.
ДИНАМИКА ТОЧКИ
.
Слайд 113Меры
движения
.
Меры
движения
.

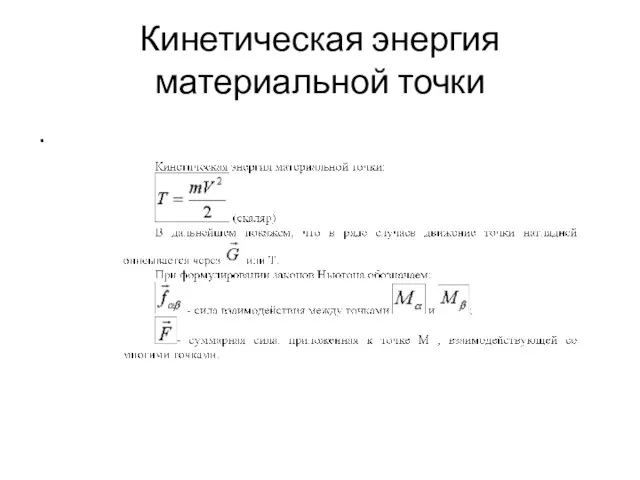
Слайд 114Кинетическая энергия материальной точки
.
Кинетическая энергия материальной точки
.
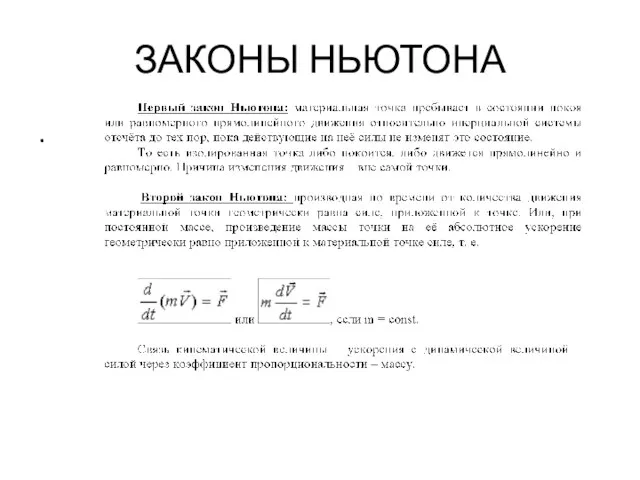
Слайд 115ЗАКОНЫ НЬЮТОНА
.
ЗАКОНЫ НЬЮТОНА
.
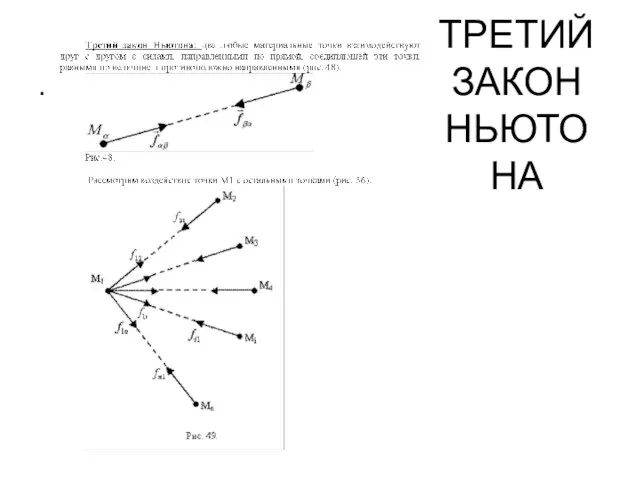
Слайд 116ТРЕТИЙ ЗАКОН НЬЮТОНА
.
ТРЕТИЙ ЗАКОН НЬЮТОНА
.
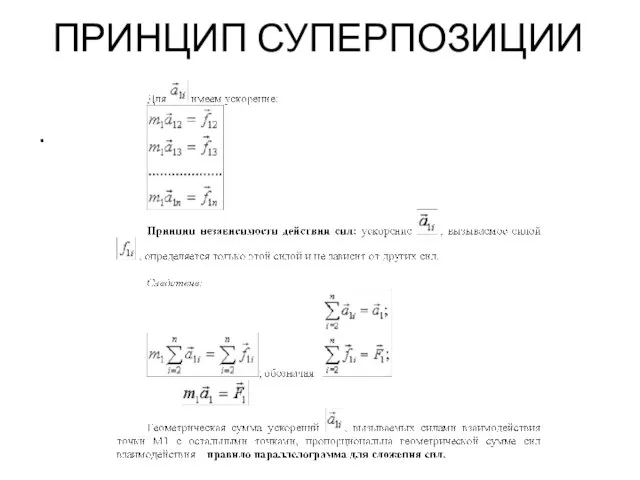
Слайд 117ПРИНЦИП СУПЕРПОЗИЦИИ
.
ПРИНЦИП СУПЕРПОЗИЦИИ
.
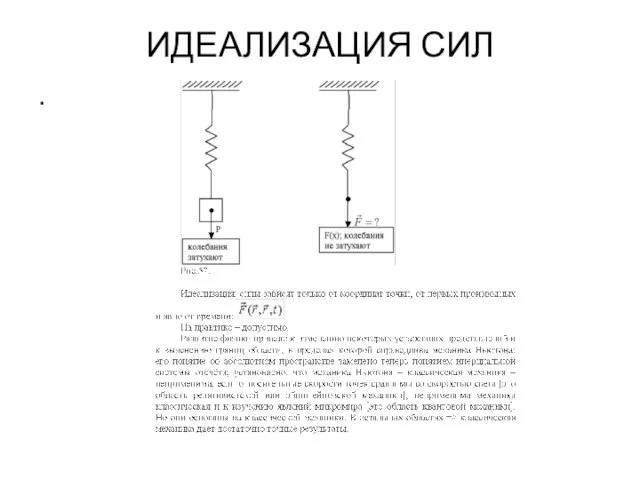
Слайд 118ИДЕАЛИЗАЦИЯ СИЛ
.
ИДЕАЛИЗАЦИЯ СИЛ
.
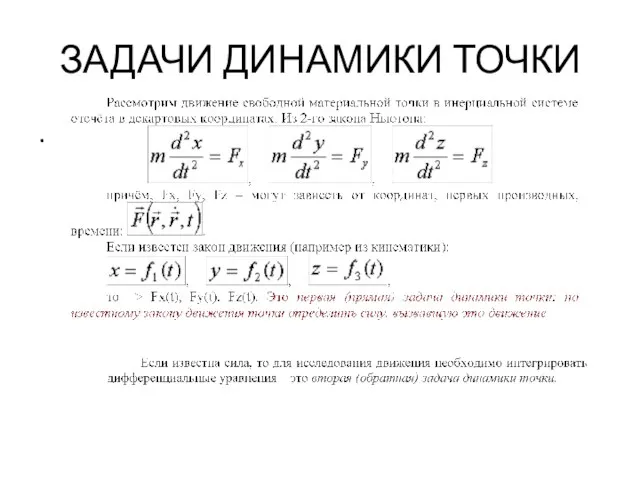
Слайд 119ЗАДАЧИ ДИНАМИКИ ТОЧКИ
.
ЗАДАЧИ ДИНАМИКИ ТОЧКИ
.
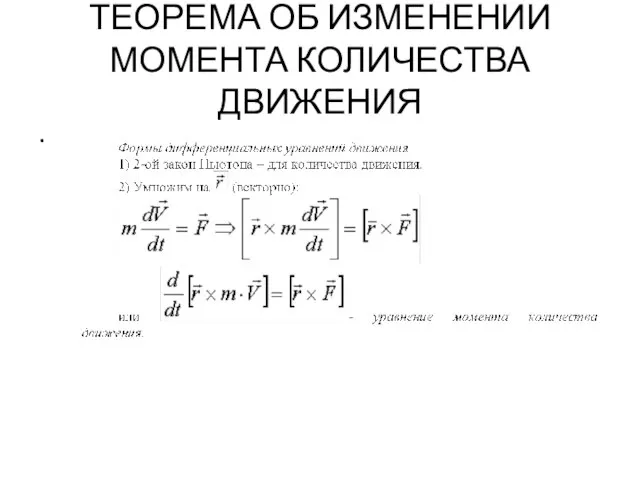
Слайд 120ТЕОРЕМА ОБ ИЗМЕНЕНИИ
МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ
.
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ
.
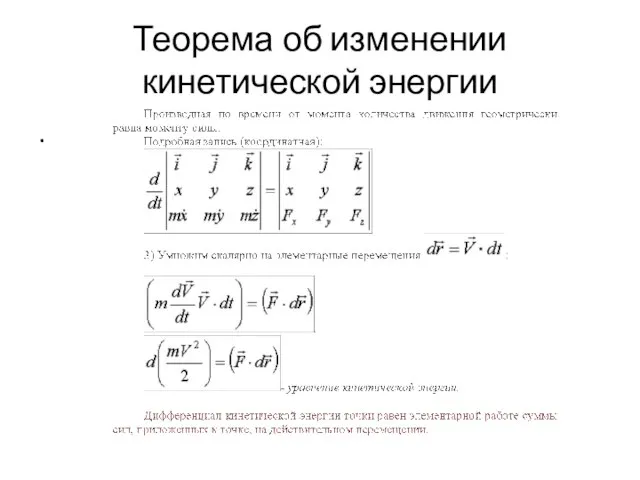
Слайд 121Теорема об изменении кинетической энергии
.
Теорема об изменении кинетической энергии
.
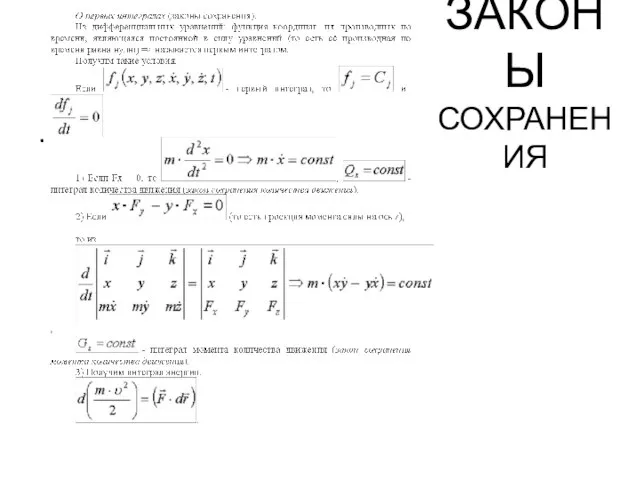
Слайд 122ЗАКОНЫ СОХРАНЕНИЯ
.
ЗАКОНЫ СОХРАНЕНИЯ
.
Слайд 123С учётом потенциала силового поля
.
С учётом потенциала силового поля
.
Слайд 124С учётом уравнения кинетической энергии в полных дифференциалах
.
С учётом уравнения кинетической энергии в полных дифференциалах
.
Слайд 125ЗАКОН СОХРАНЕНИЯ ЭНЕРГИИ
.
ЗАКОН СОХРАНЕНИЯ ЭНЕРГИИ
.
Слайд 126РАБОТА СИЛ КОНСЕРВАТИВНОГО ПОЛЯ
.
РАБОТА СИЛ КОНСЕРВАТИВНОГО ПОЛЯ
.
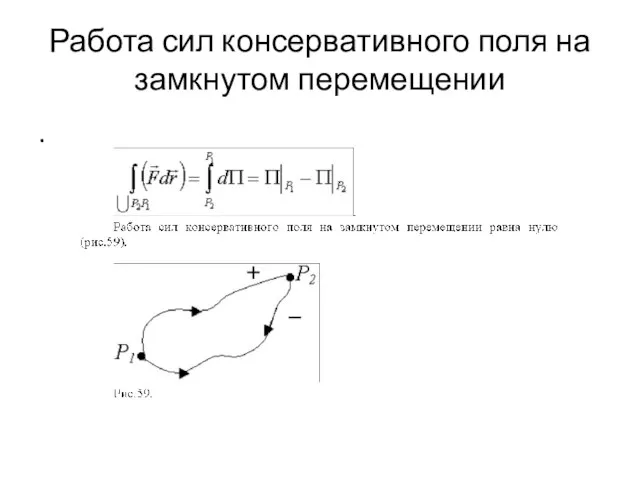
Слайд 127Работа сил консервативного поля на замкнутом перемещении
.
Работа сил консервативного поля на замкнутом перемещении
.
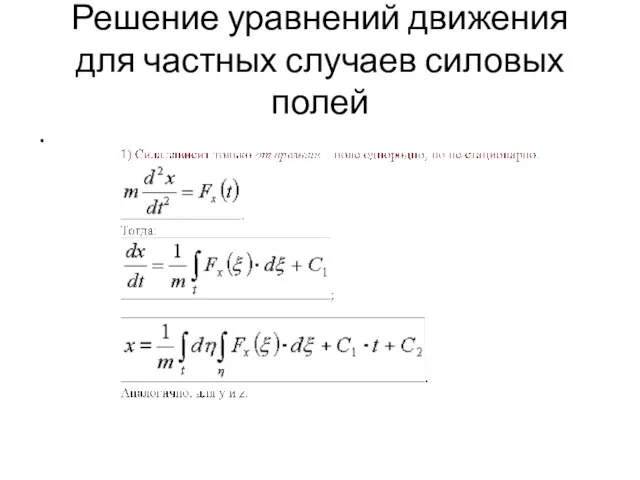
Слайд 128Решение уравнений движения для частных случаев силовых полей
.
Решение уравнений движения для частных случаев силовых полей
.


Слайд 131ДИНАМИКА МЕХАНИЧЕСКОЙ СИСТЕМЫ
.
ДИНАМИКА МЕХАНИЧЕСКОЙ СИСТЕМЫ
.

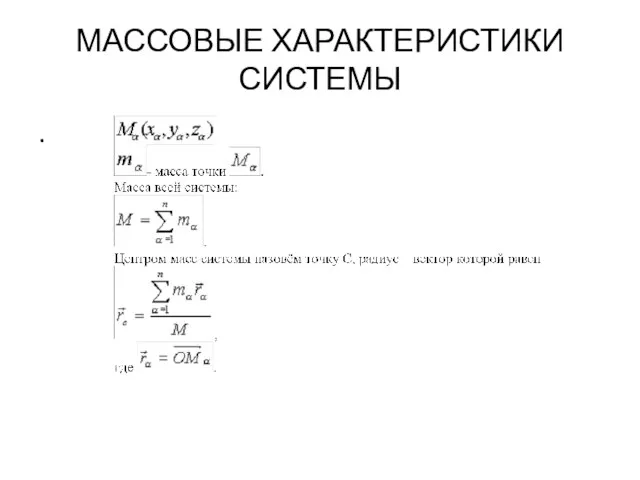
Слайд 132МАССОВЫЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ
.
МАССОВЫЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ
.
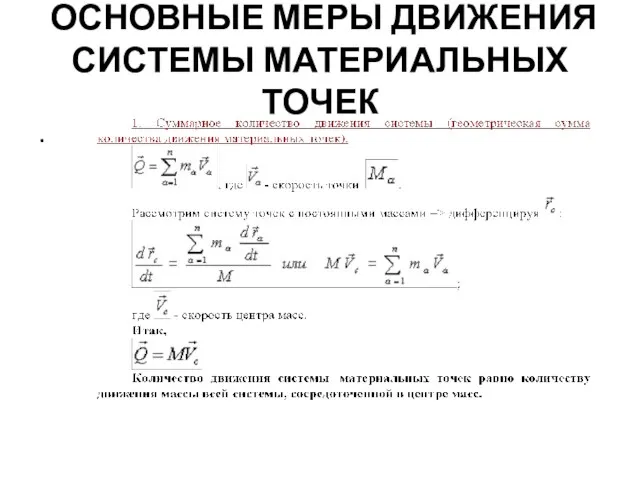
Слайд 133 ОСНОВНЫЕ МЕРЫ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
.
ОСНОВНЫЕ МЕРЫ ДВИЖЕНИЯ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
.
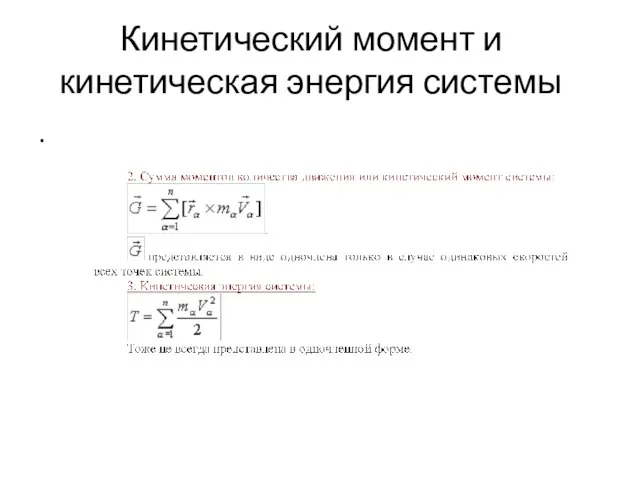
Слайд 134Кинетический момент и кинетическая энергия системы
.
Кинетический момент и кинетическая энергия системы
.
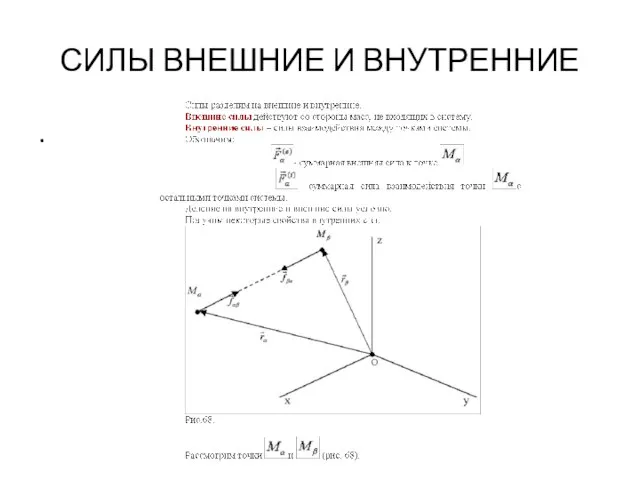
Слайд 135СИЛЫ ВНЕШНИЕ И ВНУТРЕННИЕ
.
СИЛЫ ВНЕШНИЕ И ВНУТРЕННИЕ
.
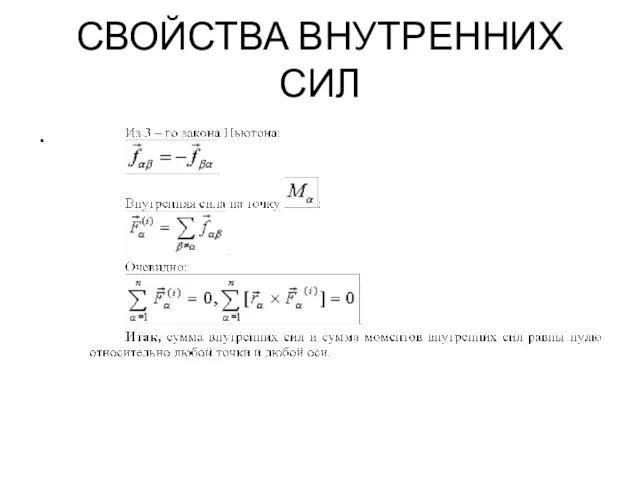
Слайд 136СВОЙСТВА ВНУТРЕННИХ СИЛ
.
СВОЙСТВА ВНУТРЕННИХ СИЛ
.
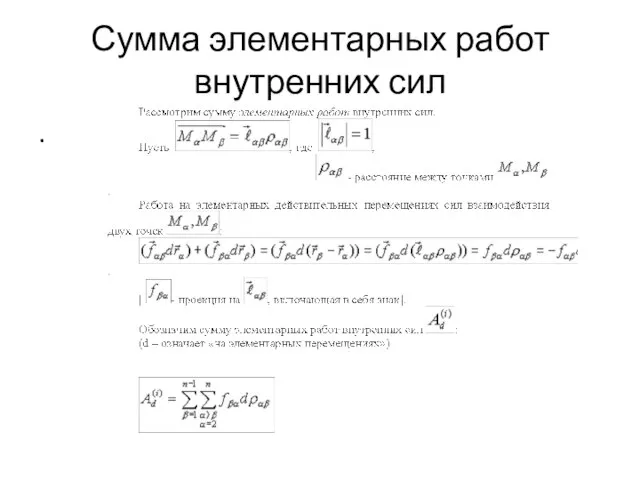
Слайд 137Сумма элементарных работ внутренних сил
.
Сумма элементарных работ внутренних сил
.
Слайд 138Общие (основные) теоремы динамики системы
.
Общие (основные) теоремы динамики системы
.


Слайд 142ЗАКОНЫ СОХРАНЕНИЯ
.
ЗАКОНЫ СОХРАНЕНИЯ
.
Слайд 143УРАВНЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
.
УРАВНЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
.
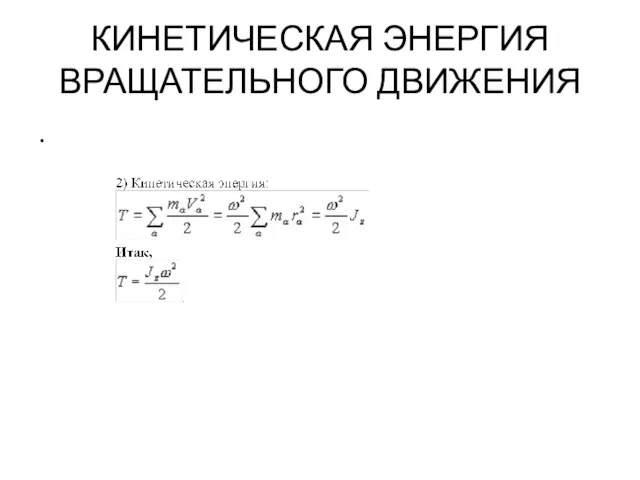
Слайд 144КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
.
КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
.
Слайд 145Моменты инерции некоторых тел
.
Моменты инерции некоторых тел
.

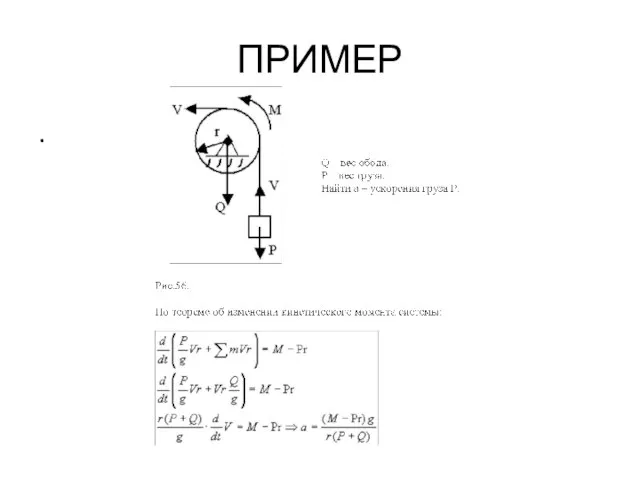
Слайд 146ПРИМЕР
.
ПРИМЕР
.
 Правописание суффиксов -ик-, -ек-
Правописание суффиксов -ик-, -ек- Летопись народного единения. Виртуальная выставка
Летопись народного единения. Виртуальная выставка МОУ «ООШ с.Никольское Духовницкого района Саратовской области» Теорема Пифагора
МОУ «ООШ с.Никольское Духовницкого района Саратовской области» Теорема Пифагора Суворов Дмитрий Пройдаков ЕвгенийКазаков Дмитрий Жуков Роман Баданов Сергей Картавый Павел Иконников Евгений.
Суворов Дмитрий Пройдаков ЕвгенийКазаков Дмитрий Жуков Роман Баданов Сергей Картавый Павел Иконников Евгений. Организационно-технические требования по охране труда
Организационно-технические требования по охране труда Творчество Б. Акунина
Творчество Б. Акунина Sea battle. Шаблон
Sea battle. Шаблон Тарханы: родные всё места
Тарханы: родные всё места Общие способы получения металлов
Общие способы получения металлов Презентация на тему Семейство Губоцветные
Презентация на тему Семейство Губоцветные Обучение в рамках квоты целевого приема от компании Апатит
Обучение в рамках квоты целевого приема от компании Апатит Лепка из пластилина. Резьба по кости
Лепка из пластилина. Резьба по кости Реализация общеобразовательной программы дошкольного образования в условиях семейной группы
Реализация общеобразовательной программы дошкольного образования в условиях семейной группы Корень n-ой степени
Корень n-ой степени Анализ ассортимента и качества детского питания, реализуемого в торговом предприятии
Анализ ассортимента и качества детского питания, реализуемого в торговом предприятии Задача «Угадайка». Требуется написать программу для игры «Угадайка». По условиям игры программа «загадывает» некоторое целое чис
Задача «Угадайка». Требуется написать программу для игры «Угадайка». По условиям игры программа «загадывает» некоторое целое чис Psikhologia_Avtosokhranenny
Psikhologia_Avtosokhranenny India - English Transit
India - English Transit Метод проектирования: комбинирование.Модели-аналоги.
Метод проектирования: комбинирование.Модели-аналоги. Особенности организации и технологий образовательного процесса на основе ФГОС 2 поколения. Лекция 1-2
Особенности организации и технологий образовательного процесса на основе ФГОС 2 поколения. Лекция 1-2 Русские народные костюмы
Русские народные костюмы Трудности в обучении письму и чтению по системе Брайля
Трудности в обучении письму и чтению по системе Брайля 2011 год Всероссийский конкурс имени Д.И. Менделеева
2011 год Всероссийский конкурс имени Д.И. Менделеева Круговая теория любви Рейса
Круговая теория любви Рейса Гаврила Романович Державин Жизнь и творчество поэта
Гаврила Романович Державин Жизнь и творчество поэта Херсоне́с Таври́ческий
Херсоне́с Таври́ческий Презентация на тему Банки на рынке ценных бумаг
Презентация на тему Банки на рынке ценных бумаг Лекция 1-2 ИРЛК. Презентация Microsoft Office PowerPoint
Лекция 1-2 ИРЛК. Презентация Microsoft Office PowerPoint