Сопровождение движущихся объектов в условиях их заслонения движущимися и неподвижными препятствиями. Н.П. Походенько, И.Е. Е
- Сопровождение движущихся объектов в условиях их заслонения движущимися и неподвижными препятствиями. Н.П. Походенько, И.Е. Е

Содержание
- 2. Общая информация Цифровые системы видеонаблюдения представлены в большинстве общественных мест для увеличения охраны и анализа ситуаций.
- 3. Введение Сопровождение движущихся объектов на видеопоследовательностях является ключевой функцией многих систем видеонаблюдения. Заслонения объекта значительно затрудняют
- 4. Основные характеристики метода сопровождения Цель: Сопровождение нескольких объектов в условиях их наложения и прохождения за препятствиями.
- 5. Построение подтраекторий: Регионы движения, обнаруженные на последовательных кадрах, объединяются в подтраектории. Необходимым условием добавления очередного региона
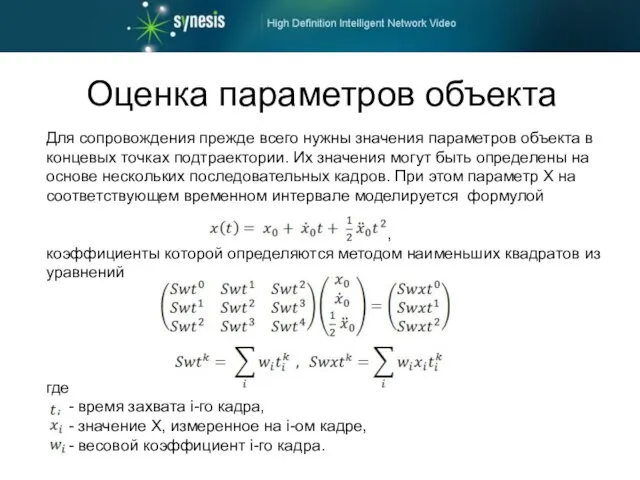
- 6. Для сопровождения прежде всего нужны значения параметров объекта в концевых точках подтраектории. Их значения могут быть
- 7. Построение траекторий Связывание подтраекторий: Объединение подтраекторий в траектоии происходит на основании критерия оценки стоимости перехода объекта
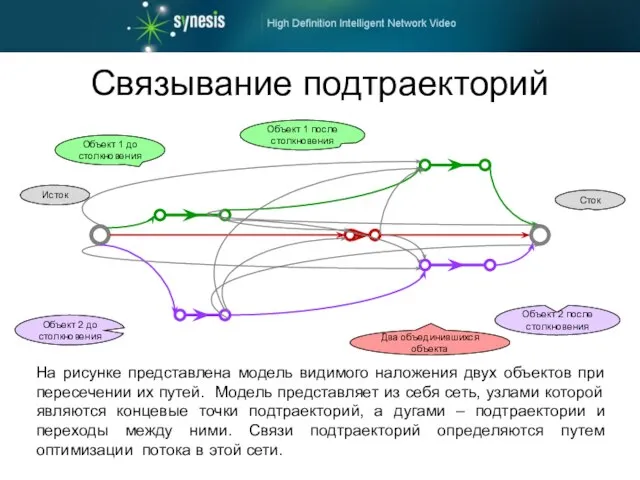
- 8. Связывание подтраекторий На рисунке представлена модель видимого наложения двух объектов при пересечении их путей. Модель представляет
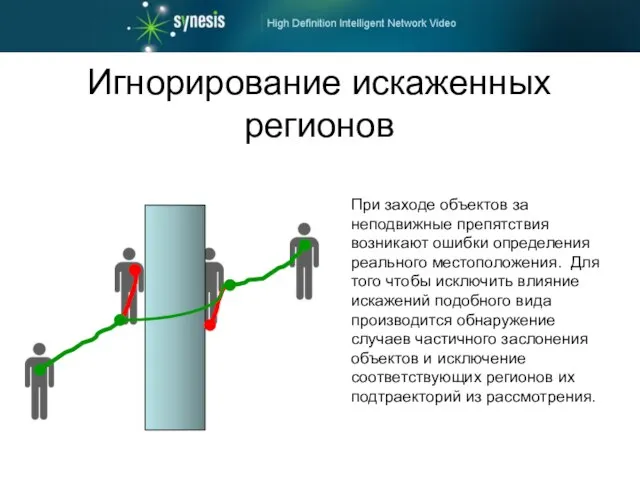
- 9. Игнорирование искаженных регионов При заходе объектов за неподвижные препятствия возникают ошибки определения реального местоположения. Для того
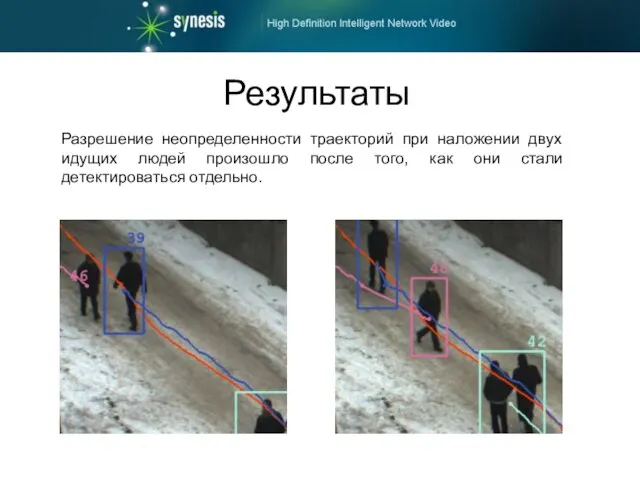
- 10. Результаты Разрешение неопределенности траекторий при наложении двух идущих людей произошло после того, как они стали детектироваться
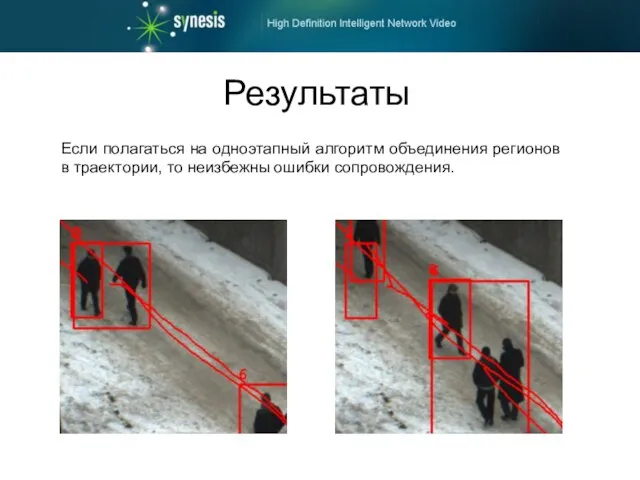
- 11. Результаты Если полагаться на одноэтапный алгоритм объединения регионов в траектории, то неизбежны ошибки сопровождения.
- 13. Скачать презентацию
Слайд 2Общая информация
Цифровые системы видеонаблюдения представлены в большинстве общественных мест для увеличения охраны
Общая информация
Цифровые системы видеонаблюдения представлены в большинстве общественных мест для увеличения охраны
Слайд 3Введение
Сопровождение движущихся объектов на видеопоследовательностях
является ключевой функцией многих систем видеонаблюдения.
Заслонения
Введение
Сопровождение движущихся объектов на видеопоследовательностях
является ключевой функцией многих систем видеонаблюдения.
Заслонения
Слайд 4Основные характеристики метода сопровождения
Цель: Сопровождение нескольких объектов в условиях их
Основные характеристики метода сопровождения
Цель: Сопровождение нескольких объектов в условиях их
Слайд 5Построение подтраекторий: Регионы движения, обнаруженные на последовательных кадрах, объединяются в подтраектории. Необходимым
Построение подтраекторий: Регионы движения, обнаруженные на последовательных кадрах, объединяются в подтраектории. Необходимым
Слайд 6Для сопровождения прежде всего нужны значения параметров объекта в концевых точках подтраектории.
Для сопровождения прежде всего нужны значения параметров объекта в концевых точках подтраектории.
Слайд 7Построение траекторий
Связывание подтраекторий: Объединение подтраекторий в траектоии происходит на основании критерия оценки
Построение траекторий
Связывание подтраекторий: Объединение подтраекторий в траектоии происходит на основании критерия оценки
Слайд 8Связывание подтраекторий
На рисунке представлена модель видимого наложения двух объектов при пересечении их
Связывание подтраекторий
На рисунке представлена модель видимого наложения двух объектов при пересечении их
Слайд 9Игнорирование искаженных регионов
При заходе объектов за неподвижные препятствия возникают ошибки определения реального
Игнорирование искаженных регионов
При заходе объектов за неподвижные препятствия возникают ошибки определения реального
Слайд 10Результаты
Разрешение неопределенности траекторий при наложении двух идущих людей произошло после того, как
Результаты
Разрешение неопределенности траекторий при наложении двух идущих людей произошло после того, как
Слайд 11Результаты
Если полагаться на одноэтапный алгоритм объединения регионов в траектории, то неизбежны ошибки
Результаты
Если полагаться на одноэтапный алгоритм объединения регионов в траектории, то неизбежны ошибки
 Правовая политика Республики Казахстан и ее направления
Правовая политика Республики Казахстан и ее направления Компания Medical Icons
Компания Medical Icons Общее понятие контроля
Общее понятие контроля Формы записи алгоритмов
Формы записи алгоритмов Посадка под школу биохакинга
Посадка под школу биохакинга Автоматизация звука Р в середине слова
Автоматизация звука Р в середине слова В библиотеке Мурманского государственного технического университета с 15.11.2011 по 15.11.2012 открыт доступ к Электронно-библиотечной
В библиотеке Мурманского государственного технического университета с 15.11.2011 по 15.11.2012 открыт доступ к Электронно-библиотечной  Стратегический план развития
Стратегический план развития Правописание окончаний имен существительных 1-ого и 3-го склонения в Р.п., Д.п.
Правописание окончаний имен существительных 1-ого и 3-го склонения в Р.п., Д.п. ПЛАН 2022 2023
ПЛАН 2022 2023 Александр Иванович Куприн 11 класс
Александр Иванович Куприн 11 класс otnositelnost_dvizheniya
otnositelnost_dvizheniya Татьянин день
Татьянин день Производная – это сложно, но прожить без нее не возможно?
Производная – это сложно, но прожить без нее не возможно? Давньогрецький театр та його особливості
Давньогрецький театр та його особливості Современные VPD технологии MSC.Software для университетов
Современные VPD технологии MSC.Software для университетов Excel
Excel Применение Клеточной Хемилюминесценции
Применение Клеточной Хемилюминесценции Economic Justice
Economic Justice Фотоальбом
Фотоальбом Упорство и талант
Упорство и талант Путешествие в Царство Плутона
Путешествие в Царство Плутона простое решение с большими возможностями!
простое решение с большими возможностями! Эскалация_14.10
Эскалация_14.10 Гроза и молния
Гроза и молния Влияние добычи и переработки полезных ископаемых на окружающую среду
Влияние добычи и переработки полезных ископаемых на окружающую среду Алгоритмы канального уровня
Алгоритмы канального уровня Козловская Диана. Грамоты
Козловская Диана. Грамоты