- СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ СИСТЕМЫС СТРОИТЕЛЬНАЯ МЕХАНИКА

Содержание
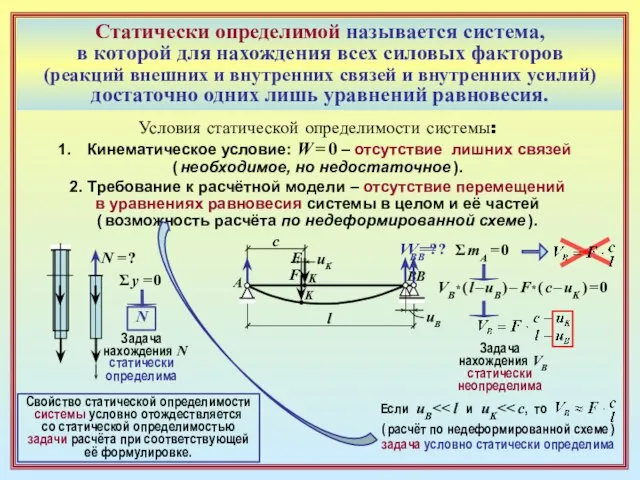
- 2. Статически определимой называется система, в которой для нахождения всех силовых факторов (реакций внешних и внутренних связей
- 3. РЕЗЮМЕ О СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ В строгом смысле, свойством статической определимости (или неопределимости) обладает не сама система,
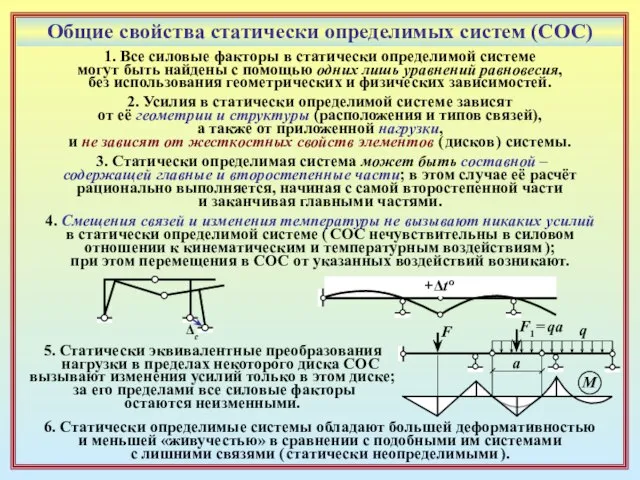
- 4. Общие свойства статически определимых систем (СОС) 1. Все силовые факторы в статически определимой системе могут быть
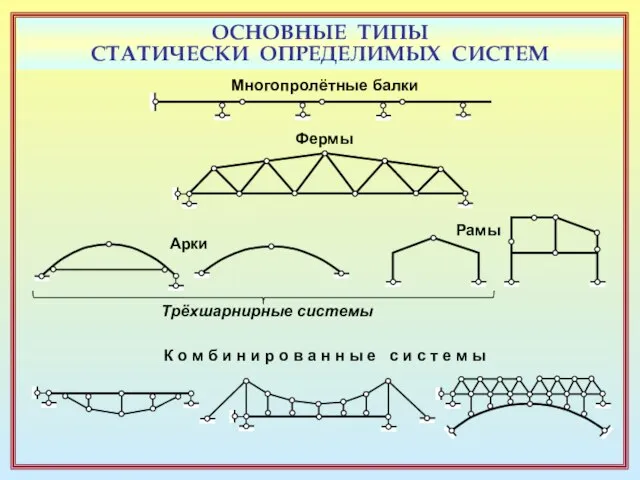
- 5. ОСНОВНЫЕ ТИПЫ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СИСТЕМ Многопролётные балки Фермы Арки Рамы Трёхшарнирные системы К о м б
- 6. МНОГОПРОЛЁТНЫЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЛКИ
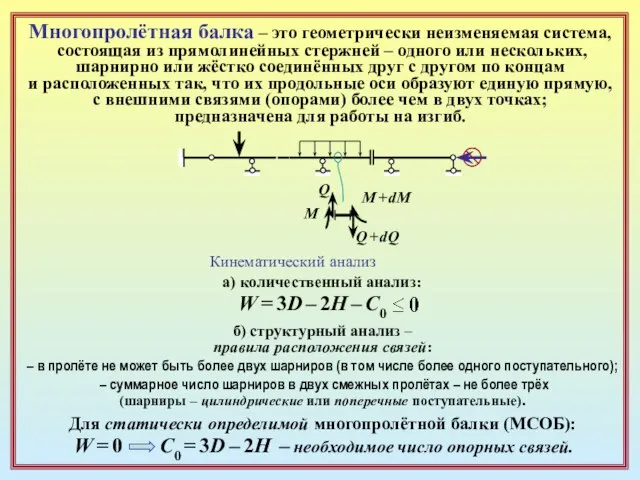
- 7. Многопролётная балка – это геометрически неизменяемая система, состоящая из прямолинейных стержней – одного или нескольких, шарнирно
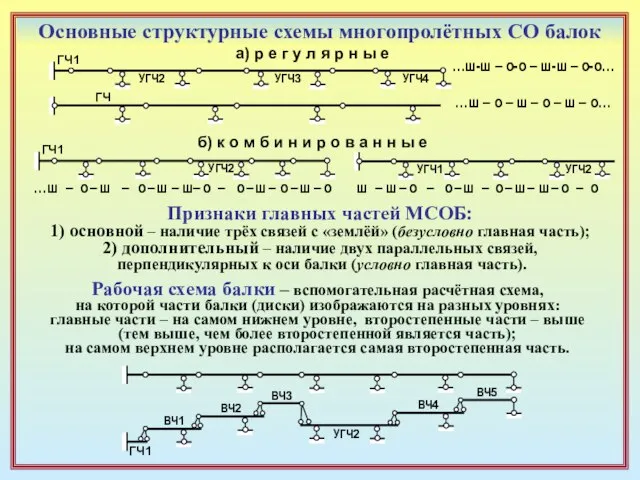
- 8. Основные структурные схемы многопролётных СО балок …ш-ш – о-о – ш-ш – о-о… …ш – о
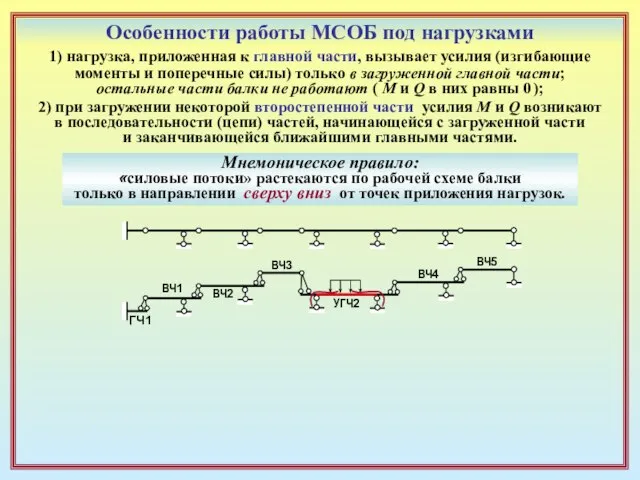
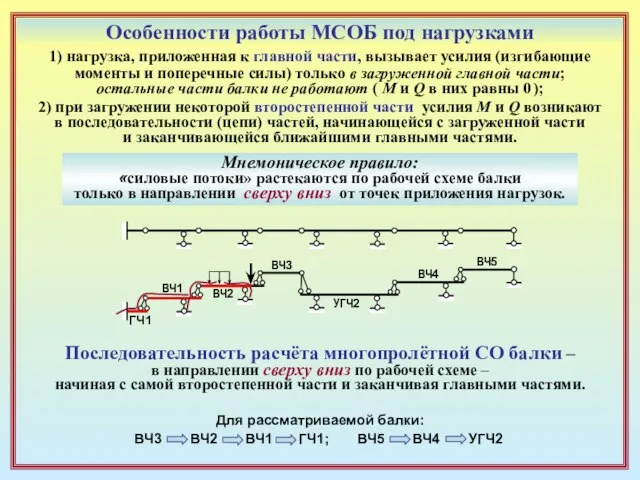
- 9. Особенности работы МСОБ под нагрузками 1) нагрузка, приложенная к главной части, вызывает усилия (изгибающие моменты и
- 10. 1) нагрузка, приложенная к главной части, вызывает усилия (изгибающие моменты и поперечные силы) только в загруженной
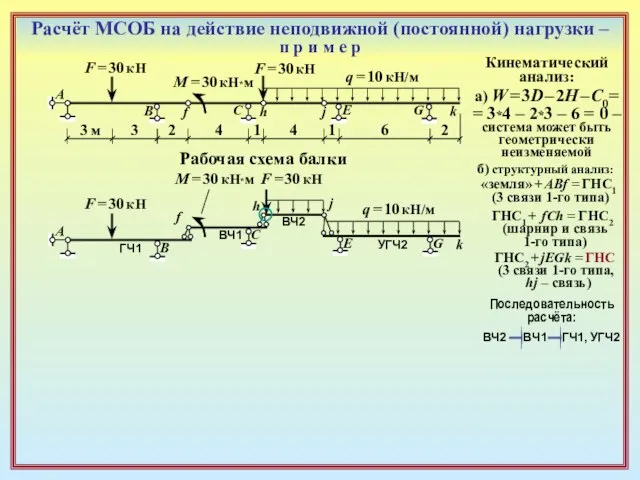
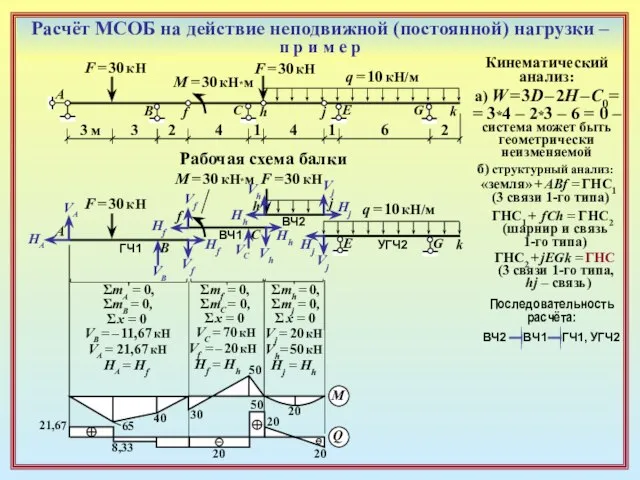
- 11. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
- 12. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
- 13. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
- 14. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
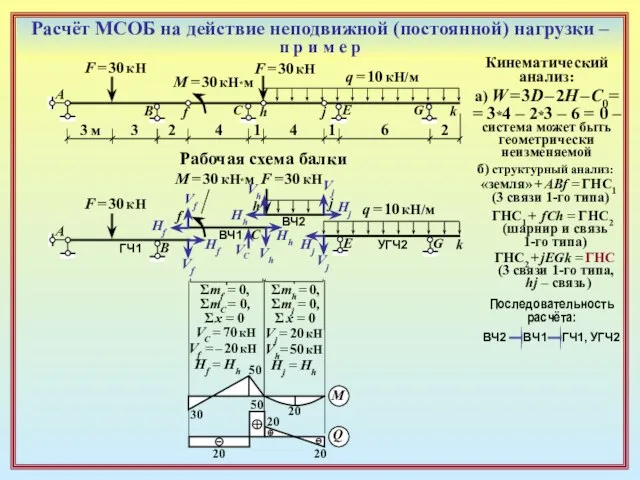
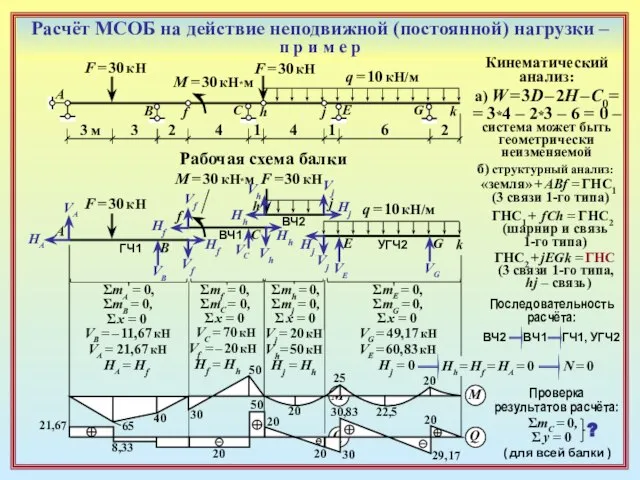
- 15. Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м е р ГЧ1 УГЧ2
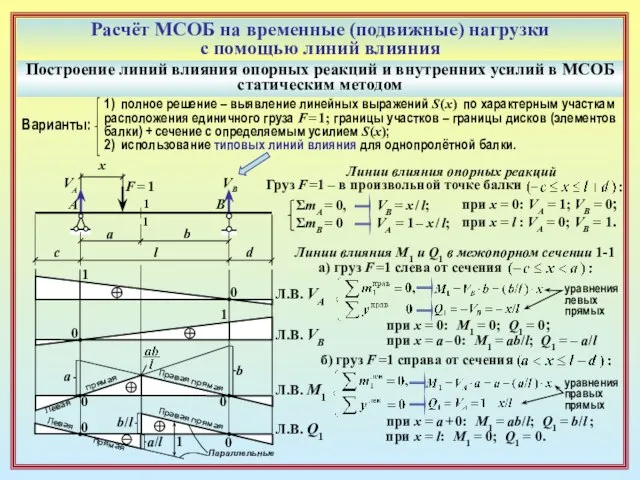
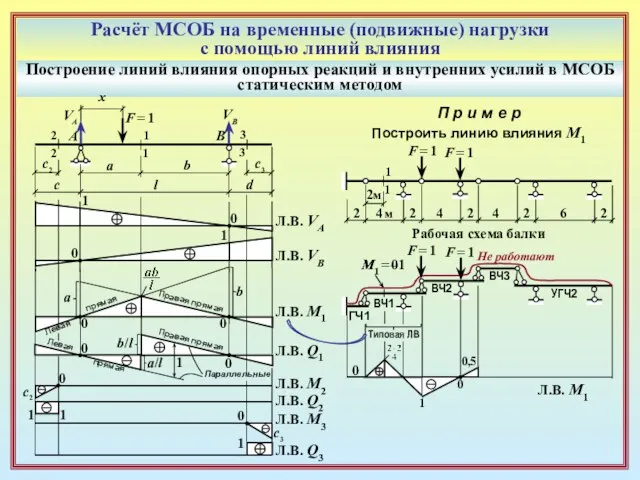
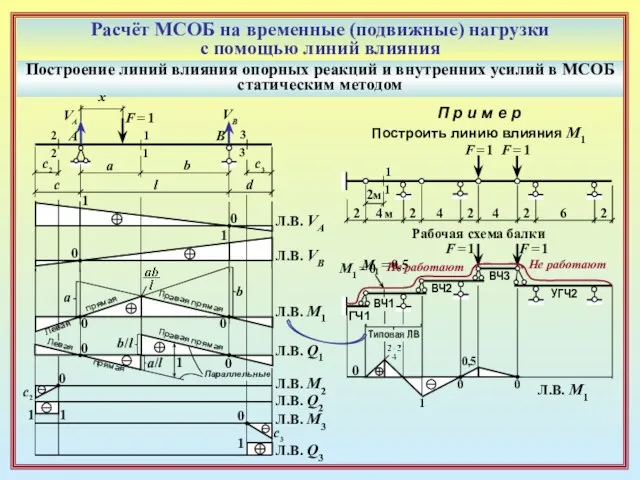
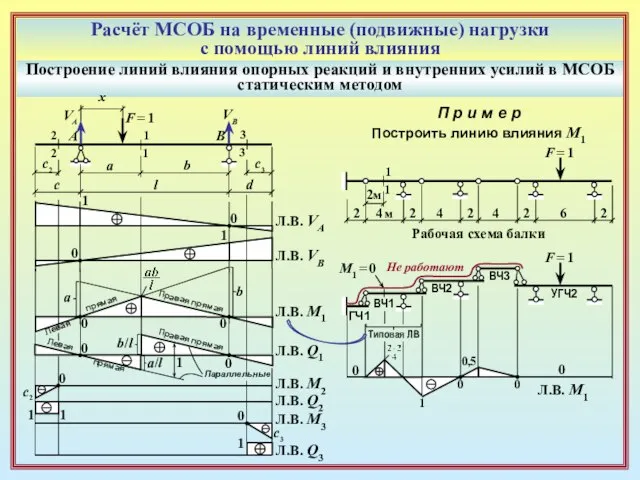
- 16. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 17. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 18. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 19. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 20. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 21. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 22. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 23. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 24. Расчёт МСОБ на временные (подвижные) нагрузки с помощью линий влияния Построение линий влияния опорных реакций и
- 25. К о н т р о л ь н ы е в о п р о
- 27. Скачать презентацию
Слайд 2Статически определимой называется система,
в которой для нахождения всех силовых факторов
(реакций
Статически определимой называется система,
в которой для нахождения всех силовых факторов
(реакций
Слайд 3РЕЗЮМЕ О СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ
В строгом смысле, свойством статической определимости
(или неопределимости) обладает
РЕЗЮМЕ О СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ
В строгом смысле, свойством статической определимости
(или неопределимости) обладает
Слайд 4Общие свойства статически определимых систем (СОС)
1. Все силовые факторы в статически определимой
Общие свойства статически определимых систем (СОС)
1. Все силовые факторы в статически определимой
Слайд 5ОСНОВНЫЕ ТИПЫ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СИСТЕМ
Многопролётные балки
Фермы
Арки
Рамы
Трёхшарнирные системы
К о м б и н
ОСНОВНЫЕ ТИПЫ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СИСТЕМ
Многопролётные балки
Фермы
Арки
Рамы
Трёхшарнирные системы
К о м б и н
Слайд 6МНОГОПРОЛЁТНЫЕ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ
БАЛКИ
МНОГОПРОЛЁТНЫЕ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ
БАЛКИ
Слайд 7Многопролётная балка – это геометрически неизменяемая система,
состоящая из прямолинейных стержней –
Многопролётная балка – это геометрически неизменяемая система,
состоящая из прямолинейных стержней –
Слайд 8Основные структурные схемы многопролётных СО балок
…ш-ш – о-о – ш-ш – о-о…
…ш
Основные структурные схемы многопролётных СО балок
…ш-ш – о-о – ш-ш – о-о…
…ш
Слайд 9Особенности работы МСОБ под нагрузками
1) нагрузка, приложенная к главной части, вызывает усилия
Особенности работы МСОБ под нагрузками
1) нагрузка, приложенная к главной части, вызывает усилия
Слайд 101) нагрузка, приложенная к главной части, вызывает усилия (изгибающие
моменты и поперечные силы)
1) нагрузка, приложенная к главной части, вызывает усилия (изгибающие
моменты и поперечные силы)
Слайд 11Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
Слайд 12Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
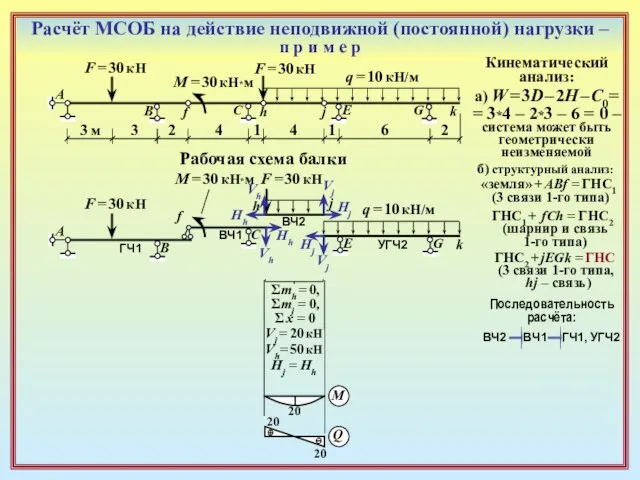
Слайд 13Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
Слайд 14Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
Слайд 15Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
Расчёт МСОБ на действие неподвижной (постоянной) нагрузки – п р и м
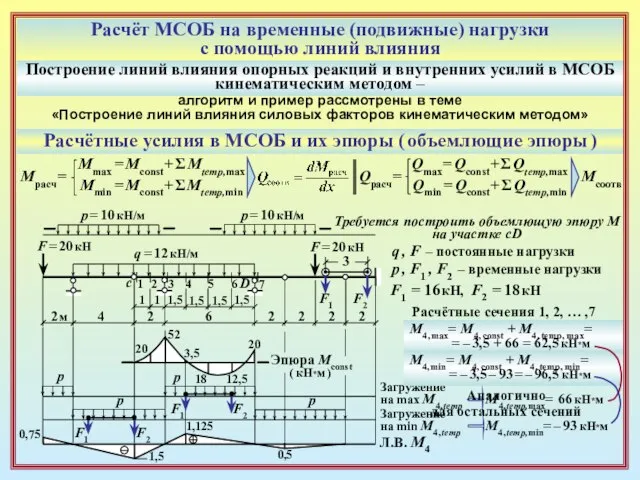
Слайд 16Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Слайд 17Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
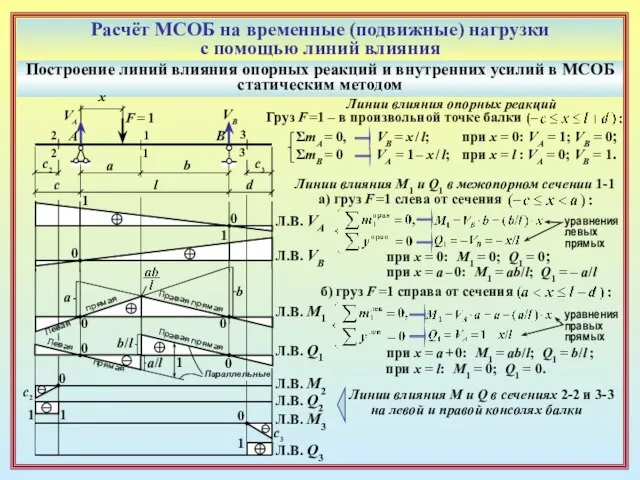
Слайд 18Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния

Слайд 19Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
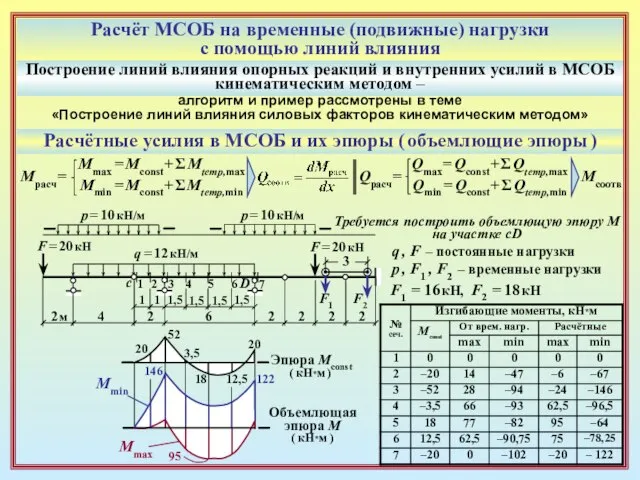
Слайд 20Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Слайд 21Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Слайд 22Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Слайд 23Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Слайд 24Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Расчёт МСОБ на временные (подвижные) нагрузки
с помощью линий влияния
Построение линий влияния
Слайд 25К о н т р о л ь н ы е в
К о н т р о л ь н ы е в
 Презентация на тему Спасители Отечества. Конец Смуты
Презентация на тему Спасители Отечества. Конец Смуты  Восстание Уота Тайлера в Англии
Восстание Уота Тайлера в Англии Курсовая работа слушателя курсов повышения квалификации «Информационные технологии в деятельности учителя- предметника» Гав
Курсовая работа слушателя курсов повышения квалификации «Информационные технологии в деятельности учителя- предметника» Гав Организация учебно – исследовательской деятельности в школе
Организация учебно – исследовательской деятельности в школе Развитие агропромышленного и рыбохозяйственного комплексов Вологодской области. Объем государственной поддержки
Развитие агропромышленного и рыбохозяйственного комплексов Вологодской области. Объем государственной поддержки Царскосельский пушкинский лицей (викторина)
Царскосельский пушкинский лицей (викторина) Устный счёт «Деление на двузначное число»
Устный счёт «Деление на двузначное число» Международный трибунал по морскому праву
Международный трибунал по морскому праву Осевая и центральная симметрия
Осевая и центральная симметрия РАЗВИТИЕ КСО ЧЕРЕЗ ПРЕПОДАВАНИЕ В УНИВЕРСИТЕТАХ КИШИНЕВ, 30 ОКТЯБРЯ МАРИНА САПРЫКИНА, ЦЕНТР РАЗВИТИЯ КСО
РАЗВИТИЕ КСО ЧЕРЕЗ ПРЕПОДАВАНИЕ В УНИВЕРСИТЕТАХ КИШИНЕВ, 30 ОКТЯБРЯ МАРИНА САПРЫКИНА, ЦЕНТР РАЗВИТИЯ КСО Белоруссия
Белоруссия ВКР: Бухгалтерский учет и анализ оплаты труда на предприятии
ВКР: Бухгалтерский учет и анализ оплаты труда на предприятии Имущество
Имущество Презентация для дипломной работы
Презентация для дипломной работы Презентация на тему Законы Кеплера законы движения небесных тел
Презентация на тему Законы Кеплера законы движения небесных тел  Интеграция информационных систем:состояние, тенденции, перспективы
Интеграция информационных систем:состояние, тенденции, перспективы Всемирный банк Программа Интернет-услуг
Всемирный банк Программа Интернет-услуг Салейкинская сельская библиотека
Салейкинская сельская библиотека Современные средства поражения
Современные средства поражения Ya_kontseptsia_Ya_ustal
Ya_kontseptsia_Ya_ustal Дикие животные тропиков
Дикие животные тропиков Урок презентация на тему Борис Заходер «История гусеницы»
Урок презентация на тему Борис Заходер «История гусеницы»  Дом приведение. Школьник. Детская газета. Выпуск 2
Дом приведение. Школьник. Детская газета. Выпуск 2 ИТОГИ ПЕРВОГО ТРИМЕСТРА
ИТОГИ ПЕРВОГО ТРИМЕСТРА ВГПУ, встреча с абитуриентами - 18
ВГПУ, встреча с абитуриентами - 18 Предоставление заявки на сертификацию СМК
Предоставление заявки на сертификацию СМК Тефлон
Тефлон Проблемыметодического обеспечения учебных дисциплин в контексте ФГОС нового поколения
Проблемыметодического обеспечения учебных дисциплин в контексте ФГОС нового поколения