- Телевизионный измерительный канал

Содержание
- 2. Телевизионный измерительный канал предназначен для визуализации объектов наблюдения (ОН), а также для вычисления их координат относительно
- 3. Основные функции телевизионного измерительного канала состоят в следующем: - Обеспечение измерения углового положения объекта наблюдения (ОН)
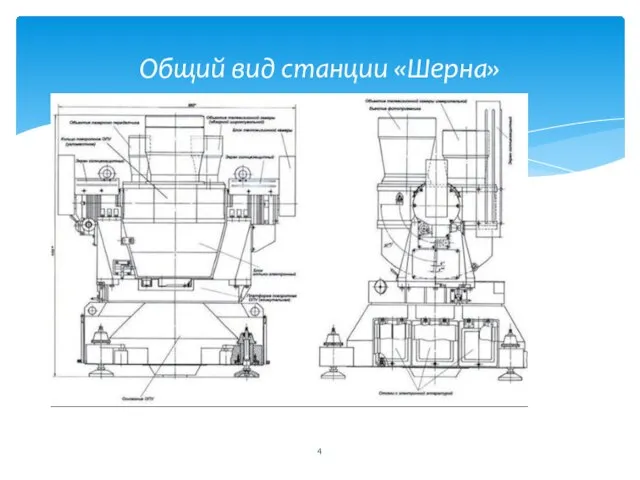
- 4. Общий вид станции «Шерна»
- 5. ОМП станции «Шерна»
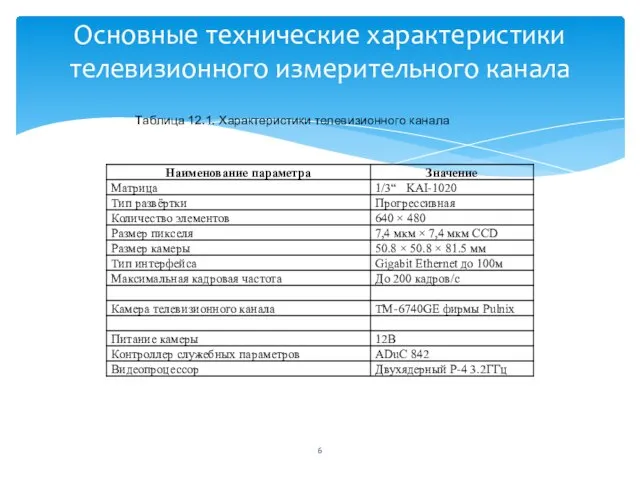
- 6. Основные технические характеристики телевизионного измерительного канала Таблица 12.1. Характеристики телевизионного канала
- 7. Прогрессивная развертка , или прогрессивное сканирование, является системой формирования видеоизображения, при которой каждая строка изображения передается
- 8. Черезстрочное и прогрессивное сканирование Кадры снятые черезстрочной и прогрессивной разверсткой
- 9. В состав ТКИ входят: Объектив, Контроллер диафрагмы, концевых выключателей, температур и напряжений, Телевизионная камера TM-6740GE, ЭВМ
- 10. Взаимодействие сигналов составных частей ТКИ
- 11. ручное управление оператором, дистанционное управление от Центральной ЭВМ станции, автосопровождение объекта. Программа управления осуществляет: отображение «строба»
- 12. передачу ТВ-кадров внешнему потребителю по каналу Gigabit Ethernet (GigE), предварительную обработку и распечатку протокола работы, построение
- 13. Информационное взаимодействие составных частей ТКИ производится по магистралям RS-485 и Gigabit Ethernet. Частота взаимодействия с контроллером
- 14. Телевизионный измерительный канал состоит из двух частей: Блока камеры, расположенного в ОЭБ; Блока обработки, расположенного в
- 15. В автономном режиме последовательность управления следующая: 1) По каналу RS-485 выдаются команды управления и производится чтение
- 16. В дистанционном режиме видеопроцессор непрерывно передаёт координаты объектов в Центральную ЭВМ, а по команде Центральной ЭВМ
- 17. Телевизионный обзорный канал (ТКО) предназначен для поиска в широком угле поля зрения объектов наблюдения (ОН) и
- 18. Объектив, Контроллер диафрагмы, концевых выключателей и напряжений, Телевизионная камера TM-6740GE, ЭВМ видеопроцессора (из состава ТКИ), Монитор
- 19. В качестве тепловизионной камеры используется «Модуль ТпВ» Модуль ТпВ» осуществляет регистрацию ИК излучения в спектральном диапазоне
- 20. В «модуле» находится фотоприемное устройство, чувствительным элементом которого является матрица ИК ПЗС 1091 на основе диодов
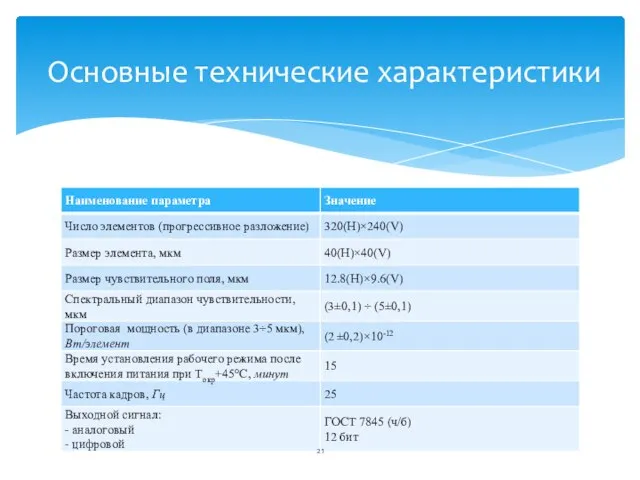
- 21. Основные технические характеристики
- 22. Лазерная локационная система - PATS
- 23. Лазерная локационная система PATS (Precision Aircraft Tracking System) предназначена для автоматического сопровождения и определения координат целй
- 24. Лазерная локационная система - PATS состоит из: инфракрасного лазерного передатчика с длиной волны излучения 1,06 мкм,
- 25. Структурная схема ЛЛС - PATS
- 26. Работает ЛЛС следующим образом. Вначале оператор с помощью ВКУ(11) , сопряженного с телевизиром (9), ведет поиск
- 27. В передающем канале, аттенюатор которого имеет три дискретных положения, излучение лазера ослабляется на 20, 40 и
- 28. В 1963 г. по инициативе Николая Геннадиевича Басова на Крымской научной станции ФИАНа (пос. Кацивели) с
- 30. Скачать презентацию
Слайд 2Телевизионный измерительный канал предназначен для визуализации объектов наблюдения (ОН), а также для
Телевизионный измерительный канал предназначен для визуализации объектов наблюдения (ОН), а также для
Слайд 3Основные функции телевизионного измерительного канала состоят в следующем:
- Обеспечение измерения углового положения
Основные функции телевизионного измерительного канала состоят в следующем:
- Обеспечение измерения углового положения

Слайд 4Общий вид станции «Шерна»
Общий вид станции «Шерна»
Слайд 5ОМП станции «Шерна»
ОМП станции «Шерна»

Слайд 6Основные технические характеристики телевизионного измерительного канала
Таблица 12.1. Характеристики телевизионного канала
Основные технические характеристики телевизионного измерительного канала
Таблица 12.1. Характеристики телевизионного канала
Слайд 7Прогрессивная развертка , или прогрессивное сканирование, является системой формирования видеоизображения, при которой
Прогрессивная развертка , или прогрессивное сканирование, является системой формирования видеоизображения, при которой
Слайд 8Черезстрочное и прогрессивное сканирование
Кадры снятые черезстрочной и прогрессивной
разверсткой
Черезстрочное и прогрессивное сканирование
Кадры снятые черезстрочной и прогрессивной
разверсткой

Слайд 9В состав ТКИ входят:
Объектив,
Контроллер диафрагмы, концевых выключателей, температур и напряжений,
Телевизионная камера TM-6740GE,
ЭВМ
В состав ТКИ входят:
Объектив,
Контроллер диафрагмы, концевых выключателей, температур и напряжений,
Телевизионная камера TM-6740GE,
ЭВМ
Слайд 10Взаимодействие сигналов составных частей ТКИ
Взаимодействие сигналов составных частей ТКИ

Слайд 11ручное управление оператором,
дистанционное управление от Центральной ЭВМ станции,
автосопровождение объекта.
Программа управления осуществляет:
отображение «строба»
ручное управление оператором,
дистанционное управление от Центральной ЭВМ станции,
автосопровождение объекта.
Программа управления осуществляет:
отображение «строба»
Слайд 12передачу ТВ-кадров внешнему потребителю по каналу Gigabit Ethernet (GigE),
предварительную обработку и распечатку
передачу ТВ-кадров внешнему потребителю по каналу Gigabit Ethernet (GigE),
предварительную обработку и распечатку
Слайд 13Информационное взаимодействие составных частей ТКИ производится по магистралям RS-485 и Gigabit Ethernet.
Информационное взаимодействие составных частей ТКИ производится по магистралям RS-485 и Gigabit Ethernet.
Слайд 14Телевизионный измерительный канал состоит из двух частей:
Блока камеры, расположенного в ОЭБ;
Блока обработки,
Телевизионный измерительный канал состоит из двух частей:
Блока камеры, расположенного в ОЭБ;
Блока обработки,
Слайд 15 В автономном режиме последовательность управления следующая:
1) По каналу RS-485 выдаются команды управления
В автономном режиме последовательность управления следующая:
1) По каналу RS-485 выдаются команды управления
Слайд 16В дистанционном режиме видеопроцессор непрерывно передаёт координаты объектов в Центральную ЭВМ, а
В дистанционном режиме видеопроцессор непрерывно передаёт координаты объектов в Центральную ЭВМ, а
Слайд 17Телевизионный обзорный канал (ТКО) предназначен для поиска в широком угле поля зрения
Телевизионный обзорный канал (ТКО) предназначен для поиска в широком угле поля зрения
Слайд 18Объектив,
Контроллер диафрагмы, концевых выключателей и напряжений,
Телевизионная камера TM-6740GE,
ЭВМ видеопроцессора (из состава ТКИ),
Объектив,
Контроллер диафрагмы, концевых выключателей и напряжений,
Телевизионная камера TM-6740GE,
ЭВМ видеопроцессора (из состава ТКИ),
Слайд 19В качестве тепловизионной камеры используется «Модуль ТпВ»
Модуль ТпВ» осуществляет регистрацию ИК
В качестве тепловизионной камеры используется «Модуль ТпВ»
Модуль ТпВ» осуществляет регистрацию ИК
Слайд 20В «модуле» находится фотоприемное устройство, чувствительным элементом которого является матрица ИК ПЗС
В «модуле» находится фотоприемное устройство, чувствительным элементом которого является матрица ИК ПЗС
Слайд 21 Основные технические характеристики
Основные технические характеристики
Слайд 22Лазерная локационная система - PATS
Лазерная локационная система - PATS

Слайд 23Лазерная локационная система PATS (Precision Aircraft Tracking System) предназначена для автоматического сопровождения
Лазерная локационная система PATS (Precision Aircraft Tracking System) предназначена для автоматического сопровождения
Слайд 24 Лазерная локационная система - PATS состоит из:
инфракрасного лазерного передатчика с длиной волны
Лазерная локационная система - PATS состоит из:
инфракрасного лазерного передатчика с длиной волны
Слайд 25Структурная схема ЛЛС - PATS
Структурная схема ЛЛС - PATS
Слайд 26 Работает ЛЛС следующим образом.
Вначале оператор с помощью ВКУ(11) , сопряженного с телевизиром
Работает ЛЛС следующим образом.
Вначале оператор с помощью ВКУ(11) , сопряженного с телевизиром
Слайд 27В передающем канале, аттенюатор которого имеет три дискретных положения, излучение лазера ослабляется
В передающем канале, аттенюатор которого имеет три дискретных положения, излучение лазера ослабляется
Слайд 28В 1963 г. по инициативе Николая Геннадиевича Басова на Крымской научной станции
В 1963 г. по инициативе Николая Геннадиевича Басова на Крымской научной станции
 м. Буськ, вул.Надсяння
м. Буськ, вул.Надсяння Seoul
Seoul Правила постановки и реализации цели
Правила постановки и реализации цели Идея образовательного кластера
Идея образовательного кластера Арисова
Арисова КОМПАНИЯ EURORESEARCH AND CONSULTING ЕВРОРЕСЕЧ И КОНСАЛТИНГ
КОМПАНИЯ EURORESEARCH AND CONSULTING ЕВРОРЕСЕЧ И КОНСАЛТИНГ ООО СПК «ЮНИТИ РЕ»
ООО СПК «ЮНИТИ РЕ» Красота природы в эпоксидной смоле
Красота природы в эпоксидной смоле Техническое регулирование: вчера, сегодня, завтра
Техническое регулирование: вчера, сегодня, завтра http://www.comp-mgpu.ru
http://www.comp-mgpu.ru Маркетинговые исследования города
Маркетинговые исследования города Управление запасами в логистике. Выбор варианта поставок
Управление запасами в логистике. Выбор варианта поставок Влияние факторов внешней среды на микроорганизмы
Влияние факторов внешней среды на микроорганизмы 5 класс. Кубановедение
5 класс. Кубановедение 20140414_chernobylskaya_katastrofa
20140414_chernobylskaya_katastrofa Индия и Китай в древности (10 класс)
Индия и Китай в древности (10 класс) Решение линейных уравнений с параметром
Решение линейных уравнений с параметром Бажов Каменный цветок
Бажов Каменный цветок Интеллектуальная игра Знатоки спорта
Интеллектуальная игра Знатоки спорта Город City
Город City Проект концепции информатизации здравоохранения Астраханской области
Проект концепции информатизации здравоохранения Астраханской области Жёлтый блокнот
Жёлтый блокнот Московский Кремль Интерактивная интеллектуальная игра
Московский Кремль Интерактивная интеллектуальная игра Social and personality development and types of play pre-school years
Social and personality development and types of play pre-school years  Конкурсный отбор площадок на статус ФИП в 2012 году Сайт http://fip.kpmo.ru А.К.Белолуцкая, заместитель директора АНО «Институт проблем обр
Конкурсный отбор площадок на статус ФИП в 2012 году Сайт http://fip.kpmo.ru А.К.Белолуцкая, заместитель директора АНО «Институт проблем обр Факторы, влиящие на поведение потребителя
Факторы, влиящие на поведение потребителя ПРОГРАММНО-ТЕХНИЧЕСКИЙ КОМПЛЕКСавтоматизированной системы управлениярежимами, энергетической эффективностью, эксплуатационн
ПРОГРАММНО-ТЕХНИЧЕСКИЙ КОМПЛЕКСавтоматизированной системы управлениярежимами, энергетической эффективностью, эксплуатационн Непредельные углеводороды. Алкены
Непредельные углеводороды. Алкены