- В. А. ГРИШИН

Содержание
- 2. Коррекция ошибок ИНС Радионавигационные системы (GPS, Глонас, Galileo и др.). Системы астрокоррекции. Навигация по геофизическим полям.
- 3. 3D реконструкция по последовательности изображений Пассивная система (нет демаскирующих признаков функционирования). Трудно создать маскирующие или имитирующие
- 4. Измерение профиля местности радиодальномером Слабое влияние атмосферных условий (облака, туман, снег и др.) Активная система (функционирование
- 5. Комплексирование информации от различных датчиков Использование информации от датчиков, работающих в различных диапазонах электромагнитных волн. Сочетание
- 6. 3D реконструкция по последовательности изображений Используется калиброванная телевизионная камера. ИНС используется для высокоточного определения пространственного положения
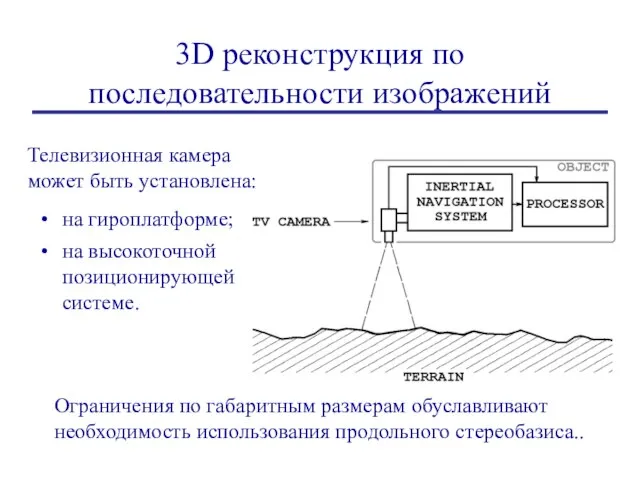
- 7. на гироплатформе; на высокоточной позиционирующей системе. 3D реконструкция по последовательности изображений Телевизионная камера может быть установлена:
- 8. Моделирование Оценивалось влияние следующих факторов: ошибки счисления текущих координат ИНС; ошибки, связанные с дрейфом осей ИНС;
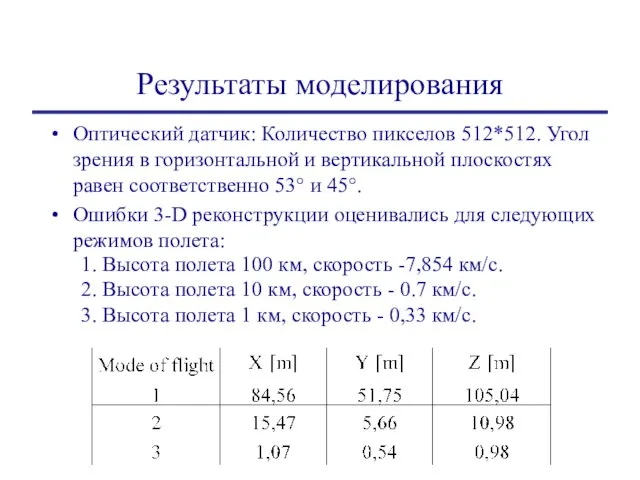
- 9. Результаты моделирования Оптический датчик: Количество пикселов 512*512. Угол зрения в горизонтальной и вертикальной плоскостях равен соответственно
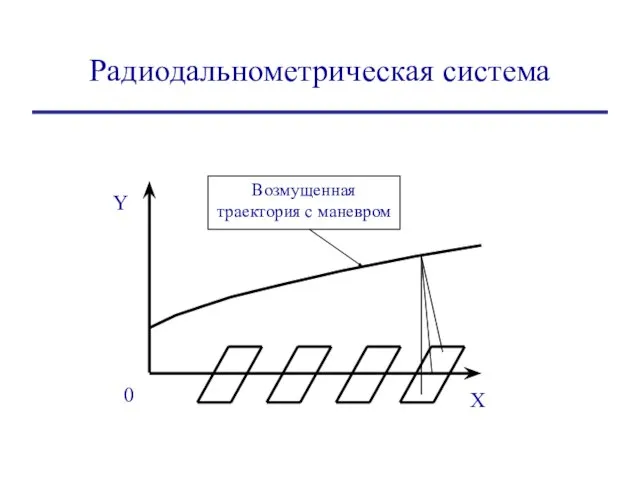
- 10. Радиодальнометрическая система Возмущенная траектория с маневром Y X 0
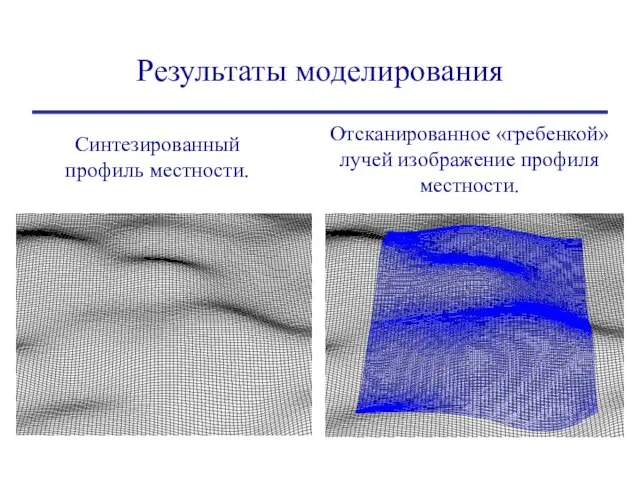
- 11. Результаты моделирования Синтезированный профиль местности. Отсканированное «гребенкой» лучей изображение профиля местности.
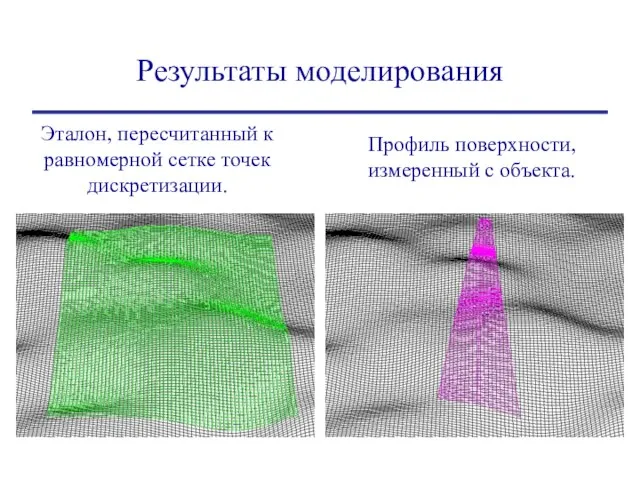
- 12. Результаты моделирования Эталон, пересчитанный к равномерной сетке точек дискретизации. Профиль поверхности, измеренный с объекта.
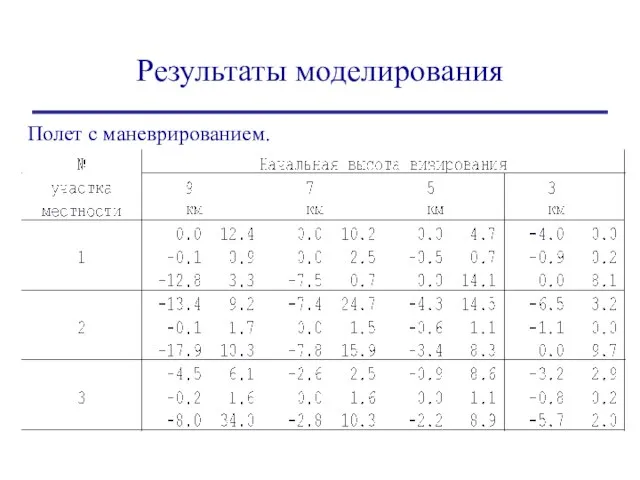
- 13. Результаты моделирования Полет с маневрированием.
- 14. Синтез эталона Методическая ошибка радиодальнометрических систем. Ошибка зависит от расстояния до поверхности, ее ориентации относительно оси
- 15. Информационный фильтр Выбор размеров и положения участка коррекции, приемлемого с учетом ограничений на траекторию движения объекта.
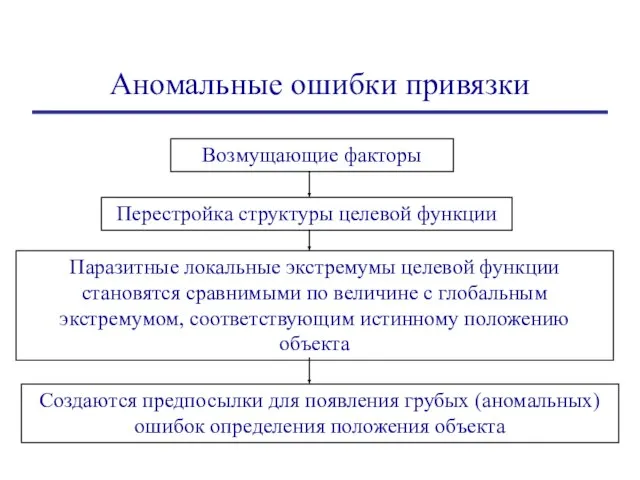
- 16. Аномальные ошибки привязки Возмущающие факторы Перестройка структуры целевой функции Паразитные локальные экстремумы целевой функции становятся сравнимыми
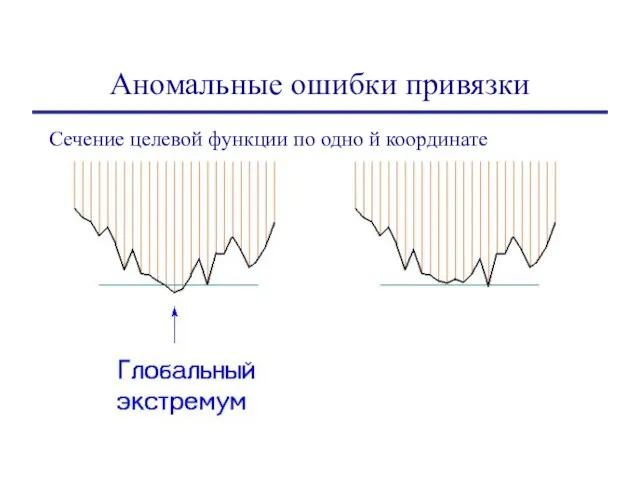
- 17. Аномальные ошибки привязки Сечение целевой функции по одно й координате
- 19. Скачать презентацию
Слайд 2Коррекция ошибок ИНС
Радионавигационные системы (GPS, Глонас, Galileo и др.).
Системы астрокоррекции.
Навигация по геофизическим
Коррекция ошибок ИНС
Радионавигационные системы (GPS, Глонас, Galileo и др.).
Системы астрокоррекции.
Навигация по геофизическим
Слайд 33D реконструкция по последовательности изображений
Пассивная система (нет демаскирующих признаков функционирования).
Трудно создать маскирующие
3D реконструкция по последовательности изображений
Пассивная система (нет демаскирующих признаков функционирования).
Трудно создать маскирующие
Слайд 4Измерение профиля местности радиодальномером
Слабое влияние атмосферных условий (облака, туман, снег и др.)
Активная
Измерение профиля местности радиодальномером
Слабое влияние атмосферных условий (облака, туман, снег и др.)
Активная
Слайд 5Комплексирование информации от различных датчиков
Использование информации от датчиков, работающих в различных диапазонах
Комплексирование информации от различных датчиков
Использование информации от датчиков, работающих в различных диапазонах
Слайд 63D реконструкция по последовательности изображений
Используется калиброванная телевизионная камера.
ИНС используется для высокоточного определения
3D реконструкция по последовательности изображений
Используется калиброванная телевизионная камера.
ИНС используется для высокоточного определения
Слайд 7на гироплатформе;
на высокоточной позиционирующей системе.
3D реконструкция по последовательности изображений
Телевизионная камера может быть
на гироплатформе;
на высокоточной позиционирующей системе.
3D реконструкция по последовательности изображений
Телевизионная камера может быть
Слайд 8Моделирование
Оценивалось влияние следующих факторов:
ошибки счисления текущих координат ИНС;
ошибки, связанные с дрейфом осей
Моделирование
Оценивалось влияние следующих факторов:
ошибки счисления текущих координат ИНС;
ошибки, связанные с дрейфом осей
Слайд 9Результаты моделирования
Оптический датчик: Количество пикселов 512*512. Угол зрения в горизонтальной и вертикальной
Результаты моделирования
Оптический датчик: Количество пикселов 512*512. Угол зрения в горизонтальной и вертикальной
Слайд 10Радиодальнометрическая система
Возмущенная траектория с маневром
Y
X
0
Радиодальнометрическая система
Возмущенная траектория с маневром
Y
X
0
Слайд 11Результаты моделирования
Синтезированный профиль местности.
Отсканированное «гребенкой» лучей изображение профиля местности.
Результаты моделирования
Синтезированный профиль местности.
Отсканированное «гребенкой» лучей изображение профиля местности.
Слайд 12Результаты моделирования
Эталон, пересчитанный к равномерной сетке точек дискретизации.
Профиль поверхности, измеренный с объекта.
Результаты моделирования
Эталон, пересчитанный к равномерной сетке точек дискретизации.
Профиль поверхности, измеренный с объекта.
Слайд 13Результаты моделирования
Полет с маневрированием.
Результаты моделирования
Полет с маневрированием.
Слайд 14Синтез эталона
Методическая ошибка радиодальнометрических систем.
Ошибка зависит от расстояния до поверхности, ее ориентации
Синтез эталона
Методическая ошибка радиодальнометрических систем.
Ошибка зависит от расстояния до поверхности, ее ориентации
Слайд 15Информационный фильтр
Выбор размеров и положения участка коррекции, приемлемого с учетом ограничений на
Информационный фильтр
Выбор размеров и положения участка коррекции, приемлемого с учетом ограничений на
Слайд 16Аномальные ошибки привязки
Возмущающие факторы
Перестройка структуры целевой функции
Паразитные локальные экстремумы целевой функции становятся
Аномальные ошибки привязки
Возмущающие факторы
Перестройка структуры целевой функции
Паразитные локальные экстремумы целевой функции становятся
Слайд 17Аномальные ошибки привязки
Сечение целевой функции по одно й координате
Аномальные ошибки привязки
Сечение целевой функции по одно й координате
 Национальные парки Африки
Национальные парки Африки Исәнмесез! Хәерле көн! Көнегез уңышлы үтсен!
Исәнмесез! Хәерле көн! Көнегез уңышлы үтсен! Равнобедренный треугольник
Равнобедренный треугольник Модели смертности
Модели смертности Стандарты обслуживания КЦ
Стандарты обслуживания КЦ Регламент исполнения процессов
Регламент исполнения процессов Презентация на тему Класс Птицы
Презентация на тему Класс Птицы О реализации электронного межведомственного взаимодействия в Российской Федерации
О реализации электронного межведомственного взаимодействия в Российской Федерации ИСТОРИЯ НАШЕГО КЛАССА
ИСТОРИЯ НАШЕГО КЛАССА Праздник воды и огня. Традиции
Праздник воды и огня. Традиции Решение задач на смеси, сплавы, растворы
Решение задач на смеси, сплавы, растворы Финансовая структура и распределение финансовой ответственности
Финансовая структура и распределение финансовой ответственности Морской кадетской школы имени адмирала Котова П.Г
Морской кадетской школы имени адмирала Котова П.Г Сфера духовной жизни общества
Сфера духовной жизни общества Женщины на государственной службе
Женщины на государственной службе Профессиональный портрет в домашних условиях
Профессиональный портрет в домашних условиях Аудитория Уанетадекабрь 2009 г.
Аудитория Уанетадекабрь 2009 г. Аппетитное радио
Аппетитное радио Псалом 38. Вечнозаветная псалтирь
Псалом 38. Вечнозаветная псалтирь WIndows XP Professional
WIndows XP Professional Who helped Morse develop the code
Who helped Morse develop the code Человек и информационное общество
Человек и информационное общество Как сделать уроки биологии любимыми? Маруся
Как сделать уроки биологии любимыми? Маруся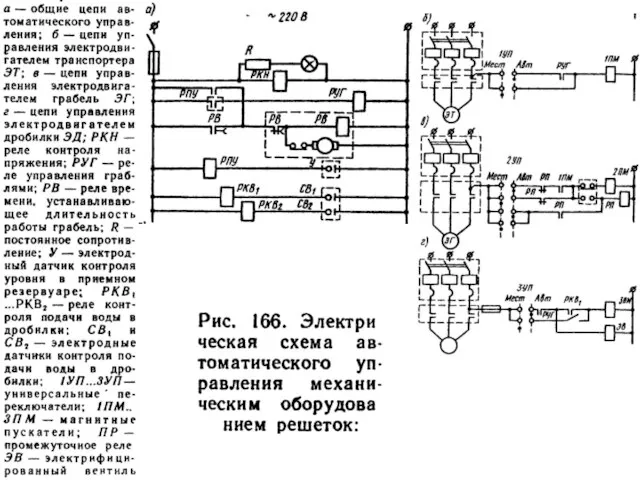 Автоматизация
Автоматизация Презентация на тему Пейзаж и его разновидности
Презентация на тему Пейзаж и его разновидности Сибирский университет Якутский филиал потребительской кооперации.
Сибирский университет Якутский филиал потребительской кооперации. Актаныш
Актаныш Обкатка машин. Окрашивание
Обкатка машин. Окрашивание