ВИЗУАЛЬНЫЕ ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ ЮСТИРОВКИ ОПТИКО-ЭЛЕКТРОННОГО КОМПЛЕКСА КОСМИЧЕСКОГО АППАРАТА Д.В. Лебедев, А.И. ТкаченкоМ
- ВИЗУАЛЬНЫЕ ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ ЮСТИРОВКИ ОПТИКО-ЭЛЕКТРОННОГО КОМПЛЕКСА КОСМИЧЕСКОГО АППАРАТА Д.В. Лебедев, А.И. ТкаченкоМ

Содержание
- 2. План выступления 1. Введение 2. Варианты схемы решения задачи 3. Алгоритмы оценки взаимной ориентации трехгранников 4.
- 3. Рисунок 1 – Формирование отображения точки М на плоскости П (r, C) (1) В системе координат
- 4. I – опорная система координат (СК); E – СК, жестко связанная с КА; E’ – СК,
- 5. (4) (5) (6) (7) (8) (9) (10) 5/20
- 6. (11) (12) 6/20 Алгоритм 1 (13)
- 7. 7/20
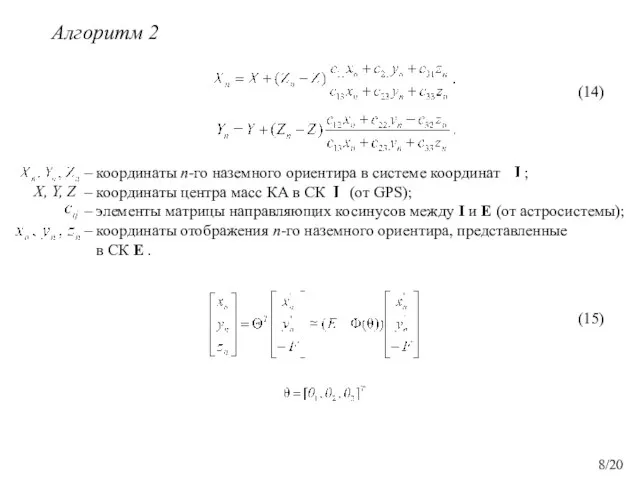
- 8. (14) (15) – координаты n-го наземного ориентира в системе координат ; – координаты центра масс КА
- 9. (17) (18) 9/20
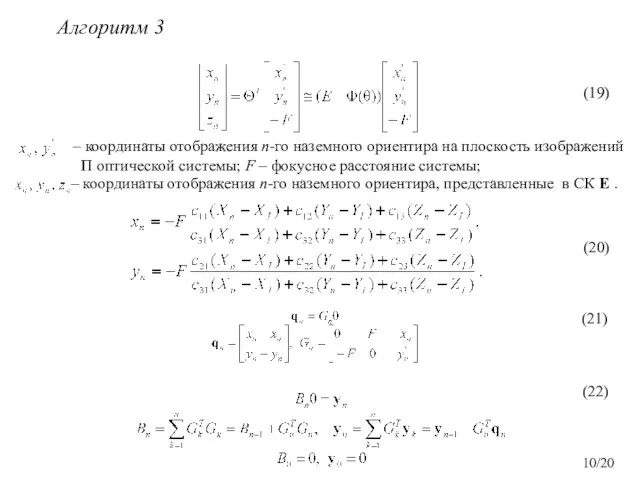
- 10. Алгоритм 3 – координаты отображения n-го наземного ориентира, представленные в СК E . – координаты отображения
- 11. Система возмущений Оптическая система (камера) Звездный датчик GPS Наземные ориентиры 11/20
- 12. . . , 12/20
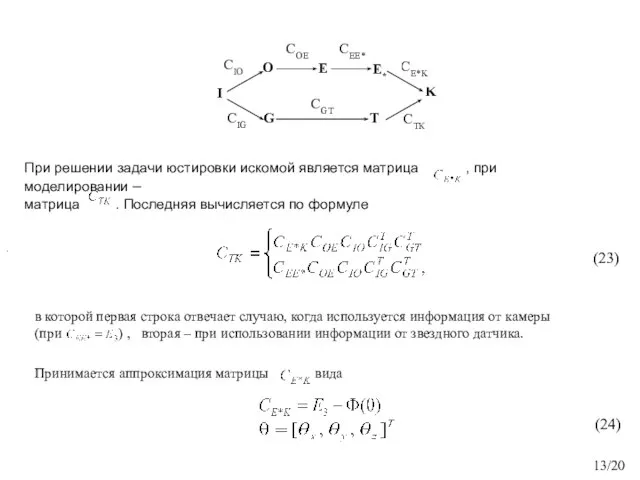
- 13. При решении задачи юстировки искомой является матрица , при моделировании – матрица . Последняя вычисляется по
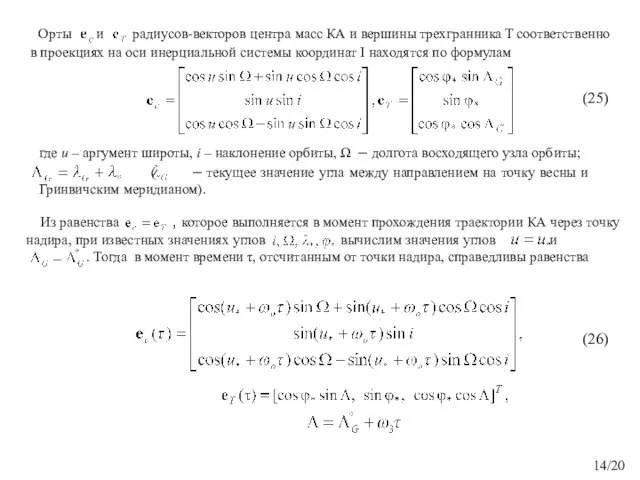
- 14. где u – аргумент широты, i – наклонение орбиты, Ω – долгота восходящего узла орбиты; (
- 15. 15/20 (27)
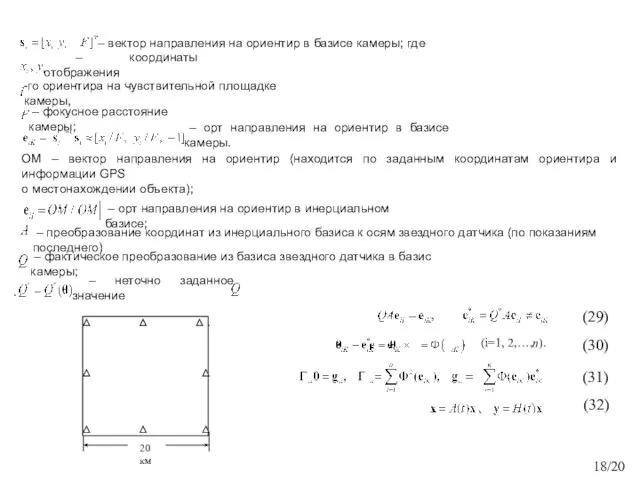
- 16. , 16/20 Характеристики круговой орбиты: высота – 680 км; наклонение орбиты – 98 град. фокусное расстояние
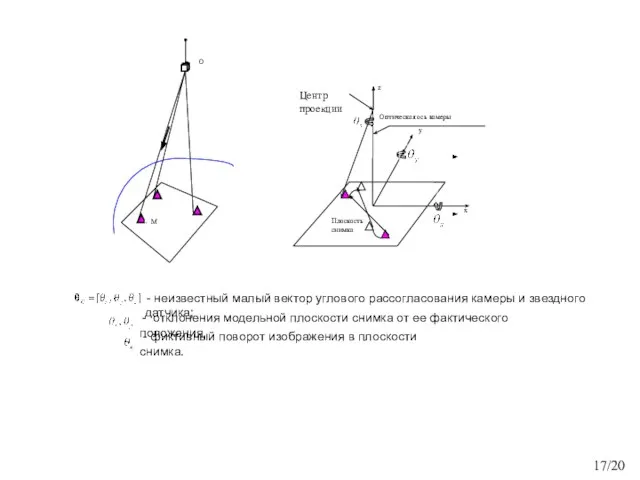
- 17. - неизвестный малый вектор углового рассогласования камеры и звездного датчика; - отклонения модельной плоскости снимка от
- 18. – вектор направления на ориентир в базисе камеры; где – координаты отображения -го ориентира на чувствительной
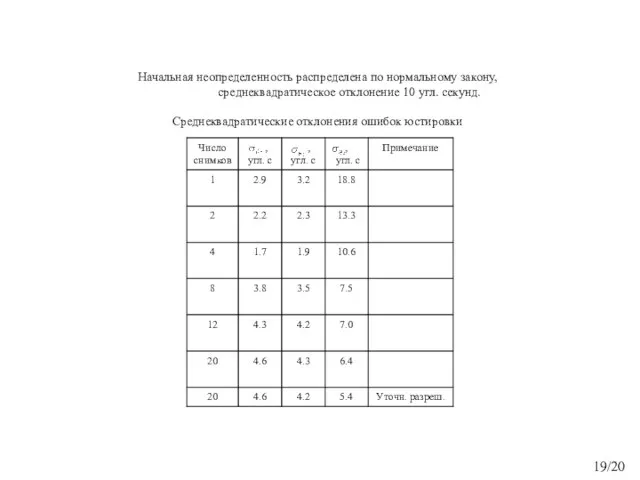
- 19. Начальная неопределенность распределена по нормальному закону, среднеквадратическое отклонение 10 угл. секунд. Среднеквадратические отклонения ошибок юстировки 19/20
- 21. Скачать презентацию
Слайд 2План выступления
1. Введение
2. Варианты схемы решения задачи
3. Алгоритмы оценки взаимной ориентации трехгранников
4.
План выступления 1. Введение 2. Варианты схемы решения задачи 3. Алгоритмы оценки взаимной ориентации трехгранников 4.
Слайд 3
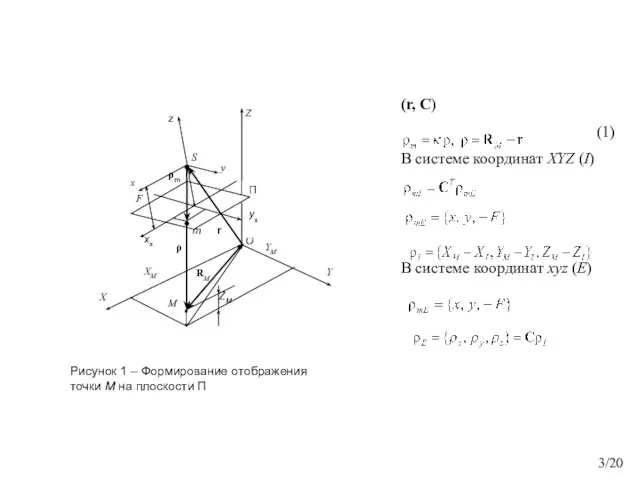
Рисунок 1 – Формирование отображения точки М на плоскости П
(r, C)
(1)
В системе
Рисунок 1 – Формирование отображения точки М на плоскости П
(r, C)
(1)
В системе
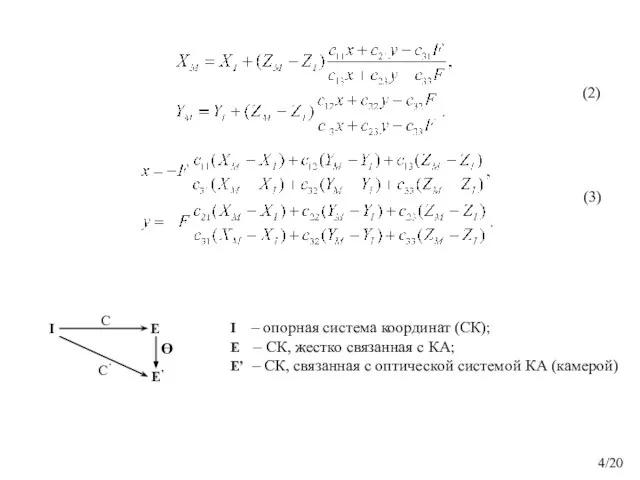
Слайд 4I – опорная система координат (СК);
E – СК, жестко связанная с КА;
E’
I – опорная система координат (СК);
E – СК, жестко связанная с КА;
E’
Слайд 5(4)
(5)
(6)
(7)
(8)
(9)
(10)
5/20
(4)
(5)
(6)
(7)
(8)
(9)
(10)
5/20

Слайд 6(11)
(12)
6/20
Алгоритм 1
(13)
(11)
(12)
6/20
Алгоритм 1
(13)

Слайд 77/20
7/20
Слайд 8(14)
(15)
– координаты n-го наземного ориентира в системе координат ;
– координаты центра масс
(14)
(15)
– координаты n-го наземного ориентира в системе координат ;
– координаты центра масс
Слайд 9(17)
(18)
9/20
(17)
(18)
9/20

Слайд 10Алгоритм 3
– координаты отображения n-го наземного ориентира, представленные в СК E
Алгоритм 3
– координаты отображения n-го наземного ориентира, представленные в СК E
Слайд 11
Система возмущений
Оптическая система
(камера)
Звездный датчик
GPS
Наземные ориентиры
11/20
Система возмущений
Оптическая система
(камера)
Звездный датчик
GPS
Наземные ориентиры
11/20

Слайд 12.
.
,
12/20
.
.
,
12/20

Слайд 13При решении задачи юстировки искомой является матрица , при моделировании –
матрица
При решении задачи юстировки искомой является матрица , при моделировании –
матрица
Слайд 14где u – аргумент широты, i – наклонение орбиты, Ω – долгота
где u – аргумент широты, i – наклонение орбиты, Ω – долгота
Слайд 1515/20
(27)
15/20
(27)

Слайд 16
,
16/20
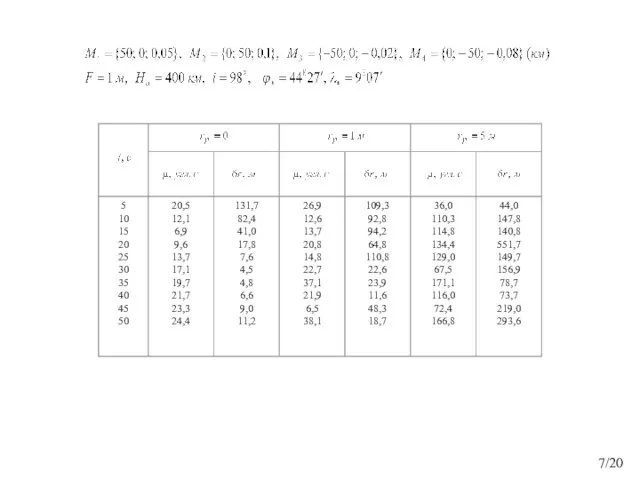
Характеристики круговой орбиты: высота – 680 км; наклонение
,
16/20
Характеристики круговой орбиты: высота – 680 км; наклонение

Слайд 17 - неизвестный малый вектор углового рассогласования камеры и звездного датчика;
-
- неизвестный малый вектор углового рассогласования камеры и звездного датчика;
-
Слайд 18 – вектор направления на ориентир в базисе камеры; где
–
– вектор направления на ориентир в базисе камеры; где
–
Слайд 19Начальная неопределенность распределена по нормальному закону,
среднеквадратическое отклонение 10 угл. секунд.
Среднеквадратические
Начальная неопределенность распределена по нормальному закону,
среднеквадратическое отклонение 10 угл. секунд.
Среднеквадратические
 Игры. Машинки
Игры. Машинки Клуб сравнительного правоведения МГИМО
Клуб сравнительного правоведения МГИМО Пропорции для срисовки
Пропорции для срисовки РОЛЬ СЛОГАНА В РЕКЛАМЕ Атясова Анастасия, 2010 г.
РОЛЬ СЛОГАНА В РЕКЛАМЕ Атясова Анастасия, 2010 г. Фотоальбом. Целостность коллекции
Фотоальбом. Целостность коллекции БИОХИМИЯ ПЕЧЕНИ
БИОХИМИЯ ПЕЧЕНИ  Russkiy
Russkiy Лексикология – раздел науки о языке, в котором изучается слово
Лексикология – раздел науки о языке, в котором изучается слово Социальные проблемы современной реабилитации
Социальные проблемы современной реабилитации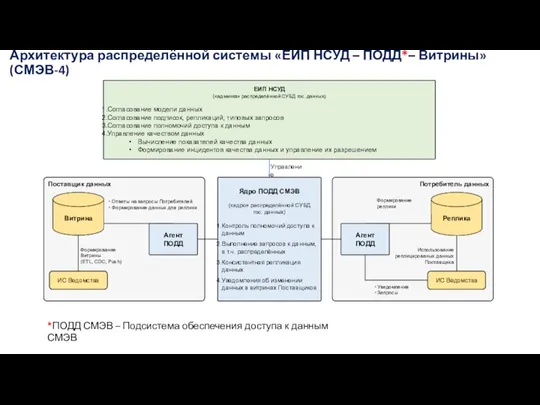 Архитектура распределённой системы
Архитектура распределённой системы Обобщение по теме Многочлены и одночлены
Обобщение по теме Многочлены и одночлены Характер (от греч. charakter – печать, чеканка)
Характер (от греч. charakter – печать, чеканка) Производительность комплекса систем
Производительность комплекса систем Общероссийская общественная организация Всероссийская Организация Интллектуальной Собственности Общество по коллективному
Общероссийская общественная организация Всероссийская Организация Интллектуальной Собственности Общество по коллективному Скромник (SCP-096)
Скромник (SCP-096) Психолого-педагогическая готовность ребёнка к обучению в гимназии
Психолого-педагогическая готовность ребёнка к обучению в гимназии Projekt Aktywizacji Seniorów
Projekt Aktywizacji Seniorów Стадии табачной эпидемии и смертность от табака
Стадии табачной эпидемии и смертность от табака Система Галактика ERP
Система Галактика ERP Выставка работ
Выставка работ Закон и власть
Закон и власть  Квест-игра Почему нужно питаться правильно?
Квест-игра Почему нужно питаться правильно? Сергей Рахманинов. Фотография с дарственной надписью
Сергей Рахманинов. Фотография с дарственной надписью Выборочное федеральное наблюдение за затратами на производство и (или) реализацию товаров (работ, услуг) и результатами деятельнос
Выборочное федеральное наблюдение за затратами на производство и (или) реализацию товаров (работ, услуг) и результатами деятельнос Информационно-образовательная среда образовательного учреждения
Информационно-образовательная среда образовательного учреждения Достопримечательности Москвы
Достопримечательности Москвы Внедрение комплексной системы анализа, контроля, управления и предупреждения срыва сроков исполнения задач
Внедрение комплексной системы анализа, контроля, управления и предупреждения срыва сроков исполнения задач Братья наши меньшие.
Братья наши меньшие.