- Выпускная квалификационная работа

Содержание
- 2. Цель работы: разработка цифрового блока управления системой приводных механизмов Задачи: 1) Проанализировать объект управления 2) Синтезировать
- 3. Технические требования: 1) диапазон входных воздействий ±10В, диапазон выходных воздействий ±15В; 2) точность навода механизма 0,1º;
- 8. φ U
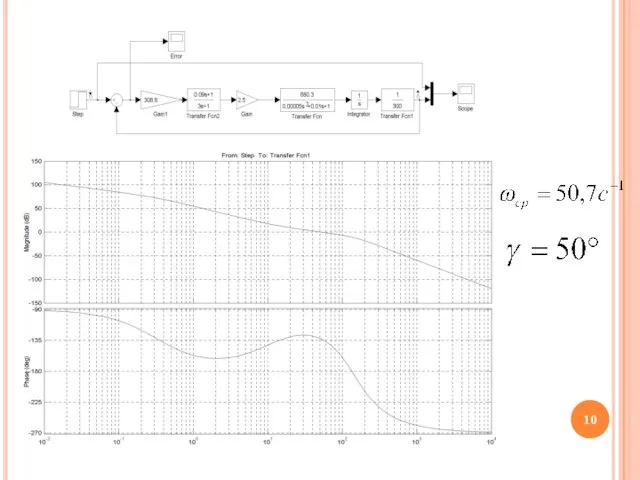
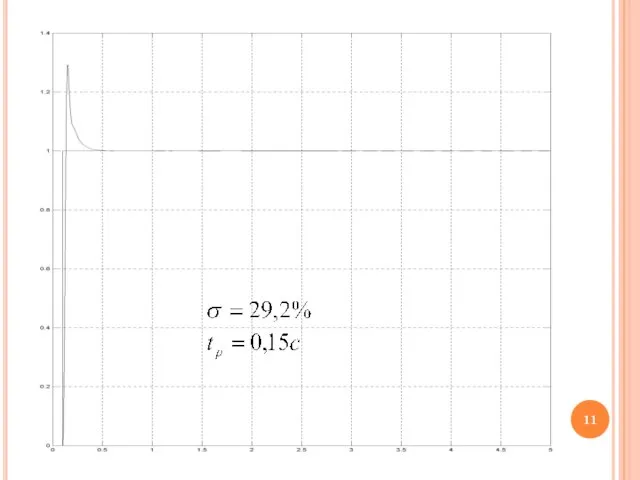
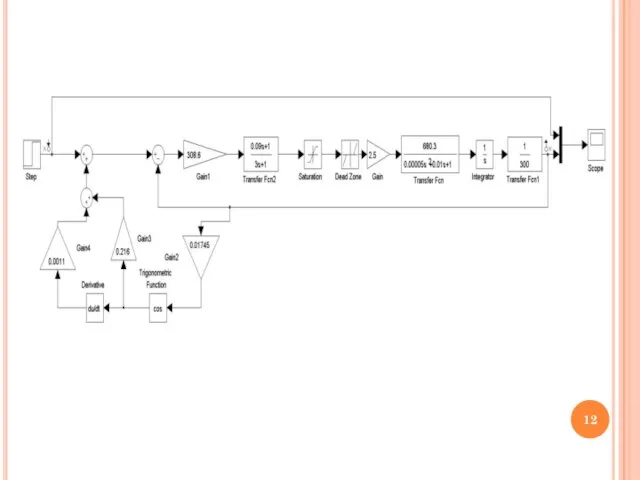
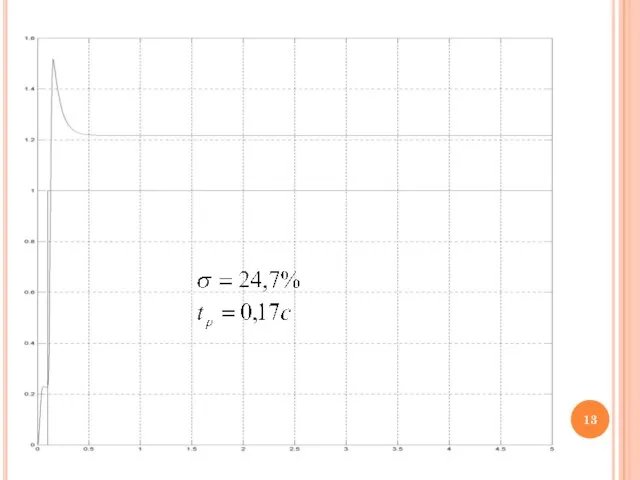
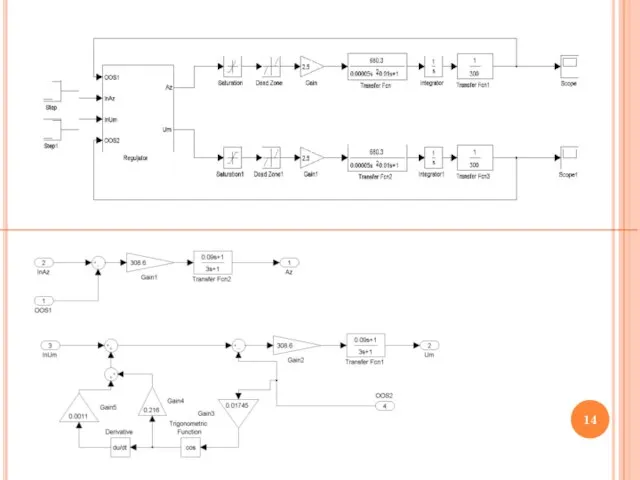
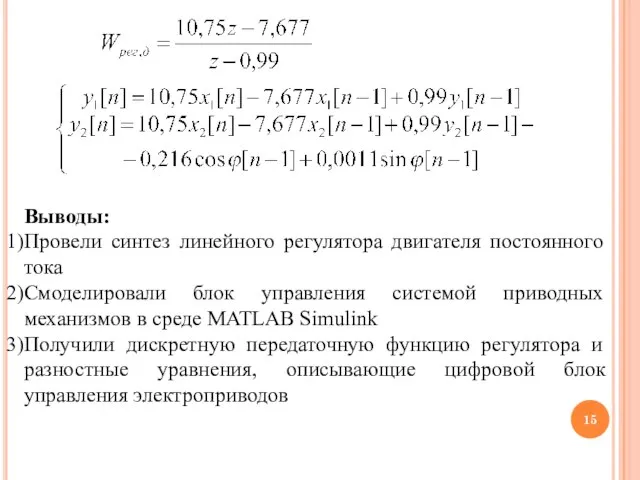
- 15. Выводы: Провели синтез линейного регулятора двигателя постоянного тока Смоделировали блок управления системой приводных механизмов в среде
- 17. Скачать презентацию
Слайд 2Цель работы: разработка цифрового блока
управления системой приводных механизмов
Задачи:
1) Проанализировать объект
Цель работы: разработка цифрового блока
управления системой приводных механизмов
Задачи:
1) Проанализировать объект
Слайд 3Технические требования:
1) диапазон входных воздействий ±10В, диапазон выходных воздействий ±15В;
2) точность навода
Технические требования:
1) диапазон входных воздействий ±10В, диапазон выходных воздействий ±15В;
2) точность навода
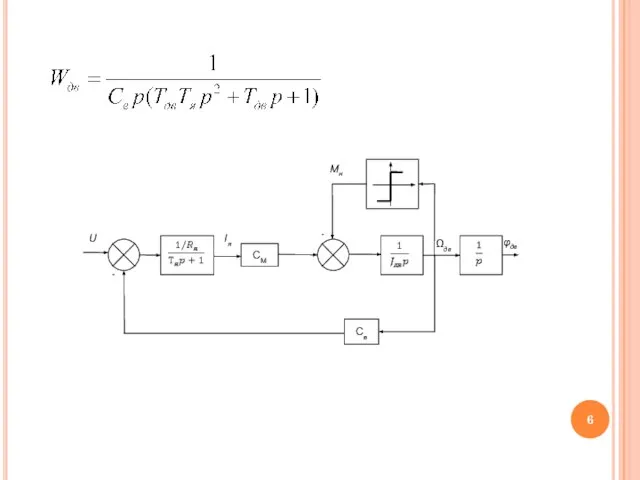
Слайд 8φ
U
φ
U
Слайд 15Выводы:
Провели синтез линейного регулятора двигателя постоянного тока
Смоделировали блок управления системой приводных механизмов
Выводы:
Провели синтез линейного регулятора двигателя постоянного тока
Смоделировали блок управления системой приводных механизмов
 Лев Николаевич Толстой
Лев Николаевич Толстой Разработка программ для обработки данных измерений in-situ (
Разработка программ для обработки данных измерений in-situ ( Экспресс-разработка модели компетенций
Экспресс-разработка модели компетенций Пусть не будет войны никогда Внеклассное мероприятие посвящённое ко Дню Победы в IV классе.
Пусть не будет войны никогда Внеклассное мероприятие посвящённое ко Дню Победы в IV классе. Влияние ультразвуковой обработки и наводороживания на усталостную долговечность и ударную вязкость сплава Ti-6Al-4V
Влияние ультразвуковой обработки и наводороживания на усталостную долговечность и ударную вязкость сплава Ti-6Al-4V Анализ работы социального педагога Косаревой Л.Г. 2010-2011 учебный год
Анализ работы социального педагога Косаревой Л.Г. 2010-2011 учебный год Правописание НЕ с причастиями
Правописание НЕ с причастиями Ударение. Делаем правильно.
Ударение. Делаем правильно. Презентация на тему Тип ПРОСТЕЙШИЕ
Презентация на тему Тип ПРОСТЕЙШИЕ  Здравствуйте! Меня зовут Ершова Людмила Алексеевна.
Здравствуйте! Меня зовут Ершова Людмила Алексеевна. Дистанционные занятия рукопашным боем для детей возрастом 8 - 9 лет
Дистанционные занятия рукопашным боем для детей возрастом 8 - 9 лет Презентация на тему Знакомство дошкольников с безопасным поведением на улицах города и правилами дорожного движения
Презентация на тему Знакомство дошкольников с безопасным поведением на улицах города и правилами дорожного движения Презентация на тему Использование нанотехнологий в исследовательской деятельности обучающихся лицея
Презентация на тему Использование нанотехнологий в исследовательской деятельности обучающихся лицея Влияние загрязнения на живые организмы
Влияние загрязнения на живые организмы Модульная технология обучения
Модульная технология обучения Cookbook. Christmas Eve Recipes
Cookbook. Christmas Eve Recipes Система права
Система права ООО «ДОК 2» новые технологии, новое качество! Продолжатель традицийООО «Озерский деревообрабатывающий комбинат»
ООО «ДОК 2» новые технологии, новое качество! Продолжатель традицийООО «Озерский деревообрабатывающий комбинат» Финансовое планирование и прогнозирование. (Тема 3)
Финансовое планирование и прогнозирование. (Тема 3) звездный час
звездный час Презентация на тему История новогодних игрушек
Презентация на тему История новогодних игрушек Food truck logo
Food truck logo Эхо холодной войны
Эхо холодной войны Гражданская позиция
Гражданская позиция Сложноподчиненные предложения.
Сложноподчиненные предложения. Письмо
Письмо Организация взаимодействия МОУ «СОШ № 56 г.Орска» с родителями и представителями общественности
Организация взаимодействия МОУ «СОШ № 56 г.Орска» с родителями и представителями общественности Дачный дом (фотографии)
Дачный дом (фотографии)