- Замена непрерывной передаточной функции дискретной передаточной функцией

Содержание
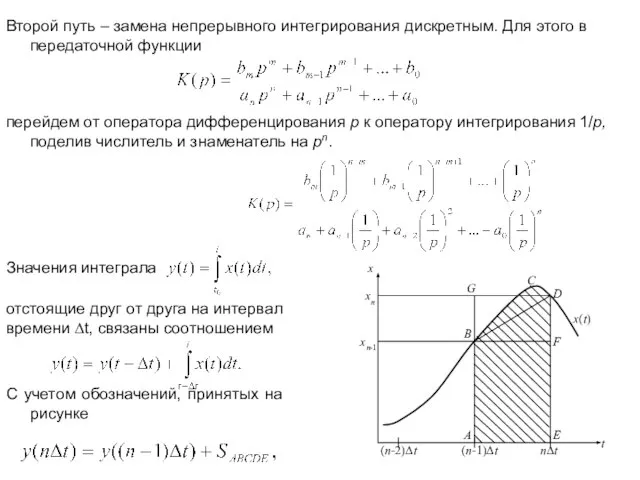
- 2. Второй путь – замена непрерывного интегрирования дискретным. Для этого в передаточной функции перейдем от оператора дифференцирования
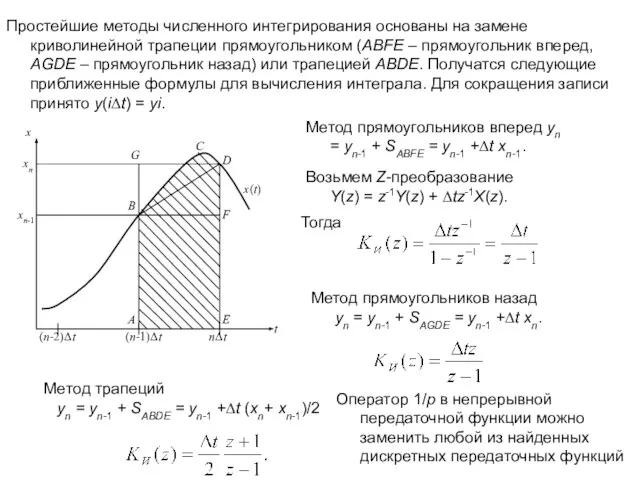
- 3. Простейшие методы численного интегрирования основаны на замене криволинейной трапеции прямоугольником (ABFE – прямоугольник вперед, AGDE –
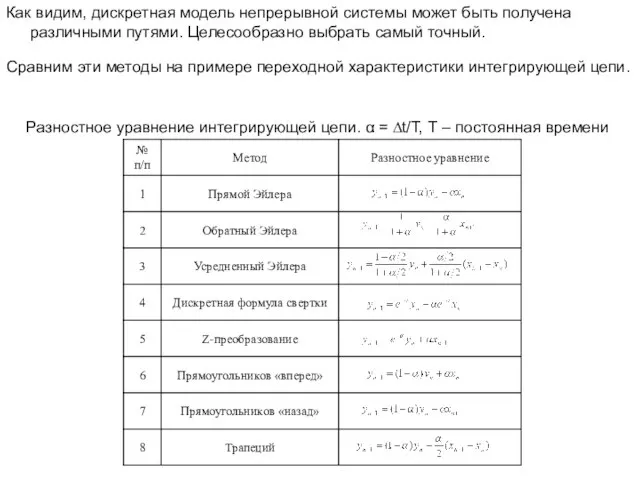
- 4. Сравним эти методы на примере переходной характеристики интегрирующей цепи. Как видим, дискретная модель непрерывной системы может
- 6. Как видим, дискретная модель непрерывной системы может быть получена различными путями. Целесообразно выбрать самый точный. Практика
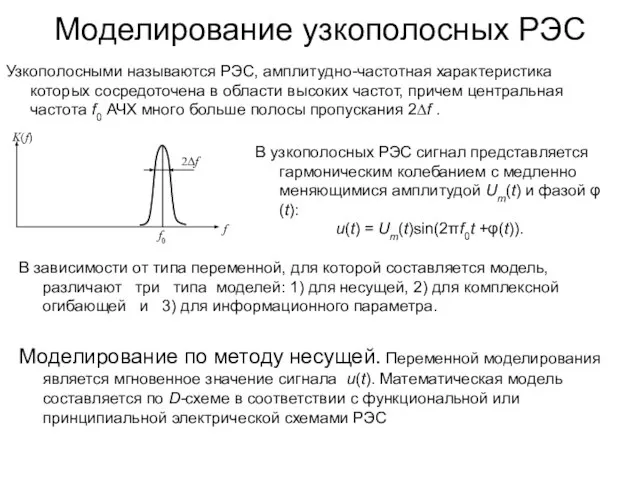
- 7. Моделирование узкополосных РЭС Узкополосными называются РЭС, амплитудно-частотная характеристика которых сосредоточена в области высоких частот, причем центральная
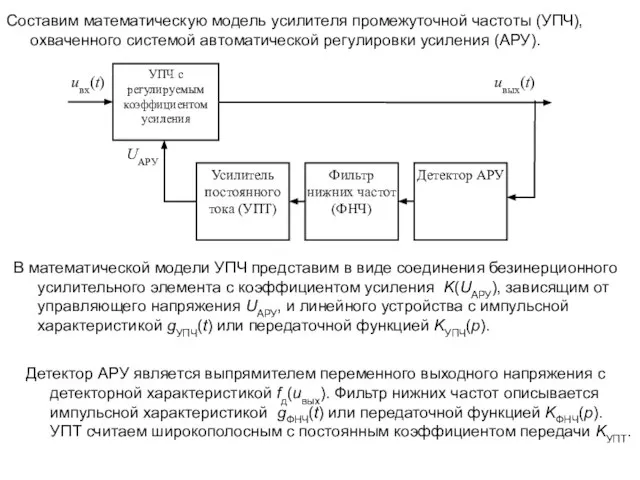
- 8. Составим математическую модель усилителя промежуточной частоты (УПЧ), охваченного системой автоматической регулировки усиления (АРУ). В математической модели
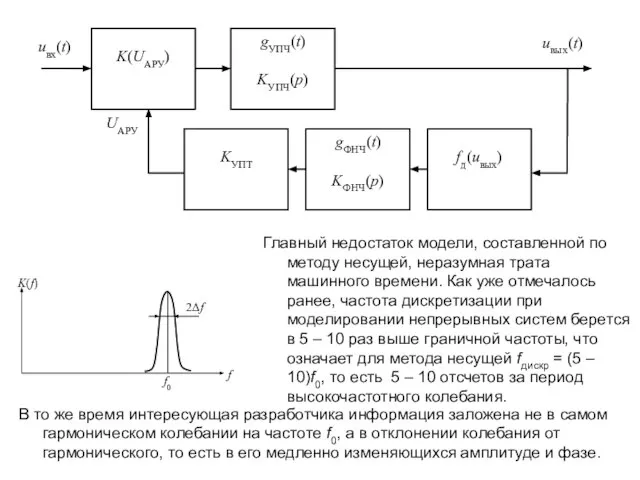
- 9. Главный недостаток модели, составленной по методу несущей, неразумная трата машинного времени. Как уже отмечалось ранее, частота
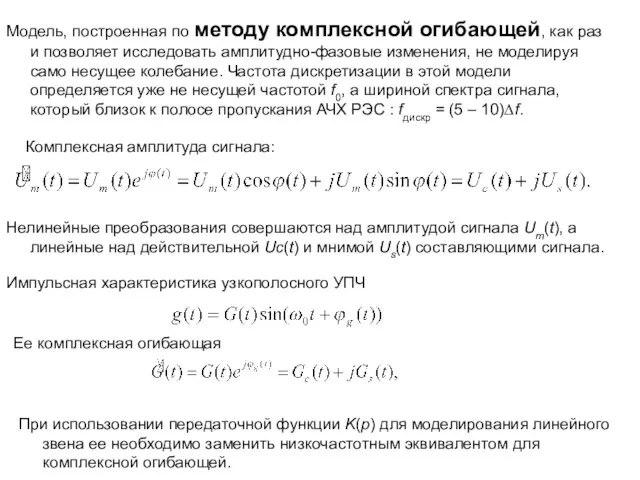
- 10. Модель, построенная по методу комплексной огибающей, как раз и позволяет исследовать амплитудно-фазовые изменения, не моделируя само
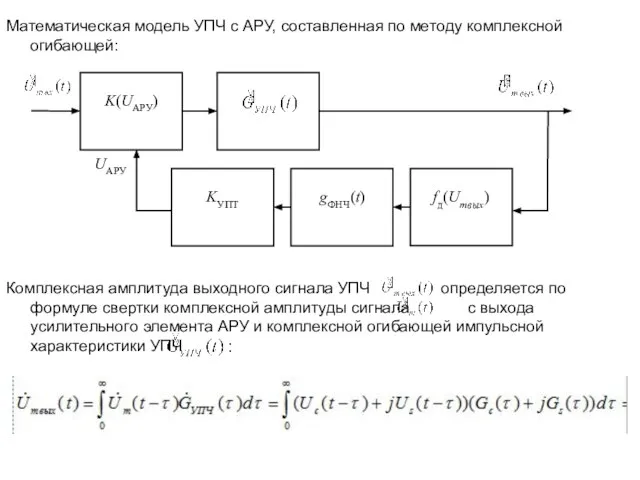
- 11. Математическая модель УПЧ с АРУ, составленная по методу комплексной огибающей:
- 12. Таким образом, в линейной модели УПЧ производится квадратурная обработка комплексной амплитуды. Входное напряжение детектора АРУ определяется
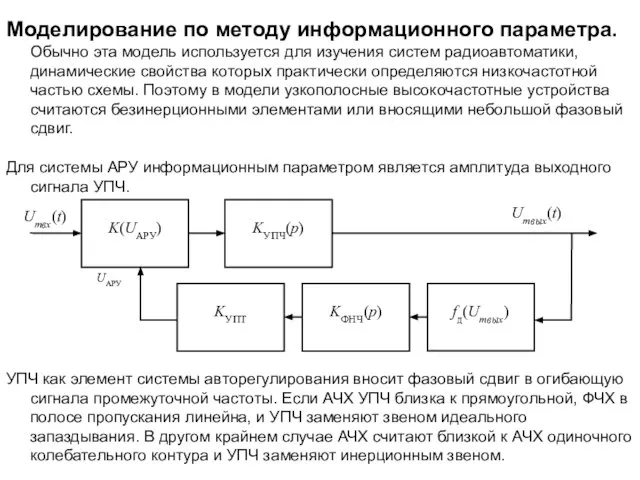
- 13. Моделирование по методу информационного параметра. Обычно эта модель используется для изучения систем радиоавтоматики, динамические свойства которых
- 15. Скачать презентацию
Слайд 2Второй путь – замена непрерывного интегрирования дискретным. Для этого в передаточной функции
перейдем
Второй путь – замена непрерывного интегрирования дискретным. Для этого в передаточной функции
перейдем
Слайд 3Простейшие методы численного интегрирования основаны на замене криволинейной трапеции прямоугольником (ABFE –
Простейшие методы численного интегрирования основаны на замене криволинейной трапеции прямоугольником (ABFE –
Слайд 4Сравним эти методы на примере переходной характеристики интегрирующей цепи.
Как видим, дискретная
Сравним эти методы на примере переходной характеристики интегрирующей цепи.
Как видим, дискретная
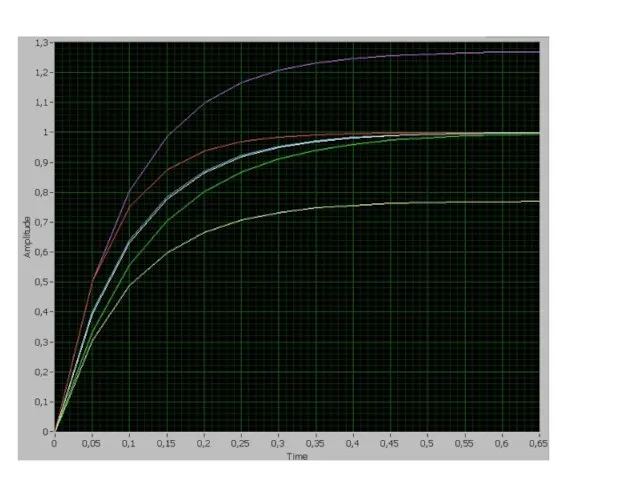
Слайд 6Как видим, дискретная модель непрерывной системы может быть получена различными путями. Целесообразно
Как видим, дискретная модель непрерывной системы может быть получена различными путями. Целесообразно
Слайд 7Моделирование узкополосных РЭС
Узкополосными называются РЭС, амплитудно-частотная характеристика которых сосредоточена в области
Моделирование узкополосных РЭС
Узкополосными называются РЭС, амплитудно-частотная характеристика которых сосредоточена в области
Слайд 8Составим математическую модель усилителя промежуточной частоты (УПЧ), охваченного системой автоматической регулировки усиления
Составим математическую модель усилителя промежуточной частоты (УПЧ), охваченного системой автоматической регулировки усиления
Слайд 9Главный недостаток модели, составленной по методу несущей, неразумная трата машинного времени. Как
Главный недостаток модели, составленной по методу несущей, неразумная трата машинного времени. Как
Слайд 10Модель, построенная по методу комплексной огибающей, как раз и позволяет исследовать амплитудно-фазовые
Модель, построенная по методу комплексной огибающей, как раз и позволяет исследовать амплитудно-фазовые
Слайд 11Математическая модель УПЧ с АРУ, составленная по методу комплексной огибающей:
Математическая модель УПЧ с АРУ, составленная по методу комплексной огибающей:
Слайд 12Таким образом, в линейной модели УПЧ производится квадратурная обработка комплексной амплитуды.
Входное напряжение
Таким образом, в линейной модели УПЧ производится квадратурная обработка комплексной амплитуды.
Входное напряжение

Слайд 13Моделирование по методу информационного параметра. Обычно эта модель используется для изучения систем
Моделирование по методу информационного параметра. Обычно эта модель используется для изучения систем
 Фонетика русского языка
Фонетика русского языка В мире интересного
В мире интересного Полновесные электронные библиотеки в интернете, источники электронного комплектования
Полновесные электронные библиотеки в интернете, источники электронного комплектования Лексикология и фразеология
Лексикология и фразеология Cream&Chocolate
Cream&Chocolate Чудеса России
Чудеса России Late adulthood
Late adulthood LIETUVOS MENININKU SOCIALINE PADETIS RYTU IR VIDURIO EUROPOS KONTEKSTE
LIETUVOS MENININKU SOCIALINE PADETIS RYTU IR VIDURIO EUROPOS KONTEKSTE Таблицы по Теории организации
Таблицы по Теории организации American holidays
American holidays  Станция «Поморская».
Станция «Поморская». Путь героя к преступлению
Путь героя к преступлению Деепричастие
Деепричастие Электрические машины. ЭДС обмотки якоря, электромагнитный момент, реакция якоря. (Лекция 2)
Электрические машины. ЭДС обмотки якоря, электромагнитный момент, реакция якоря. (Лекция 2) Практикум по методам психологического исследования. Лабораторное занятие № 1
Практикум по методам психологического исследования. Лабораторное занятие № 1 Nicaragua
Nicaragua Восприятие. Психические процессы
Восприятие. Психические процессы Тьюторское сопровождение образовательной программы
Тьюторское сопровождение образовательной программы Книга рекордов Гиннесса
Книга рекордов Гиннесса Презентация на тему Знаки препинания при однородных членах
Презентация на тему Знаки препинания при однородных членах  Конституция Российской Федерации
Конституция Российской Федерации Презентация на тему Проблема терроризма в России. Бесланская трагедия
Презентация на тему Проблема терроризма в России. Бесланская трагедия  Презентация картины Валерия Хованского «Колокольчики звенят» Выполнили ученики: Лесько Караулов Константин
Презентация картины Валерия Хованского «Колокольчики звенят» Выполнили ученики: Лесько Караулов Константин  Тригонометрические функции
Тригонометрические функции  Символизм и его представители
Символизм и его представители Управление рисками
Управление рисками Die BRD (1949 -1990)
Die BRD (1949 -1990) проект по англ яз на тему проблема подростков
проект по англ яз на тему проблема подростков