- 4. Механика твердого тела

Содержание
- 2. В случае непрерывного распределения масс эта сумма сводится к интегралу где интегрирование производится по всему объему
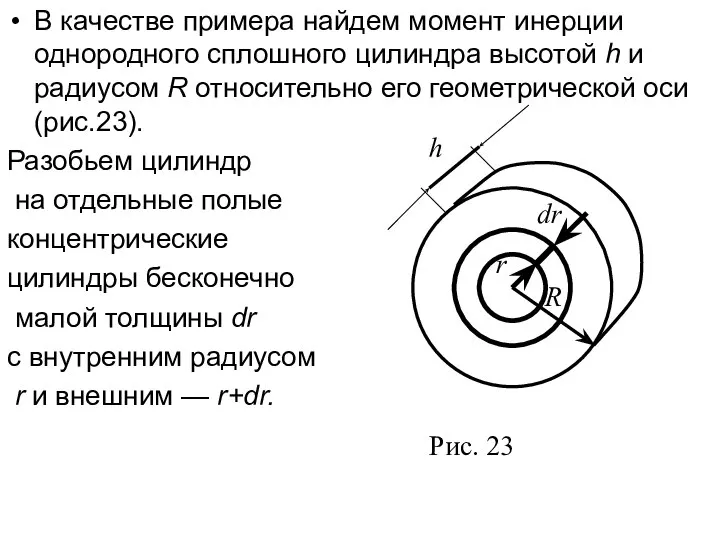
- 3. В качестве примера найдем момент инерции однородного сплошного цилиндра высотой h и радиусом R относительно его
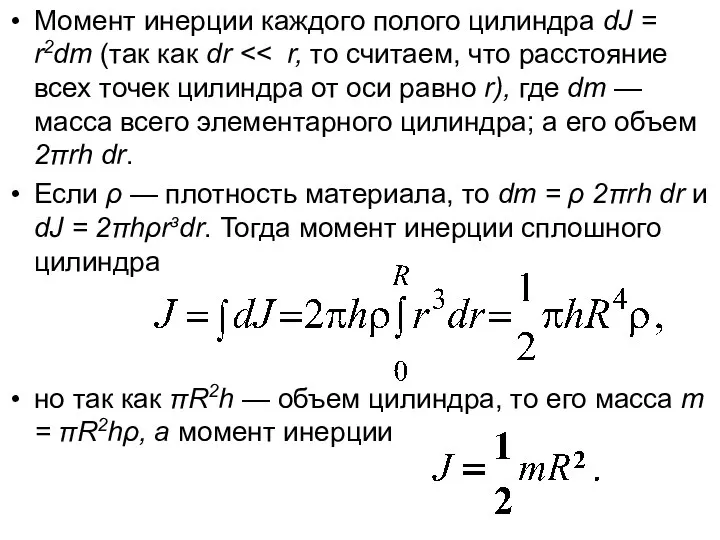
- 4. Момент инерции каждого полого цилиндра dJ = r2dm (так как dr Если ρ — плотность материала,
- 5. Если известен момент инерции тела относительно оси, проходящей через его центр масс, то момент инерции относительно
- 7. § 17. Кинетическая энергия вращения Рассмотрим абсолютно твердое тело, вращающееся около неподвижной оси z, проходящей через
- 8. Мысленно разобьем это тело на маленькие объемы с элементарными массами , находящиеся на расстоянии от оси
- 9. Кинетическую энергию вращающегося тела найдем как сумму кинетических энергий его элементарных объемов: Или Используя выражение (17.1),
- 10. Таким образом, кинетическая энергия вращающегося тела Из сравнения формулы (17.2) с выражением (12.1) для кинетической энергии
- 11. В случае плоского движения тела, например цилиндра, скатывающегося с наклонной плоскости без скольжения, энергия движения складывается
- 12. § 18. Момент силы. Уравнение динамики вращательного движения твердого тела Моментом силы F относительно неподвижной точки
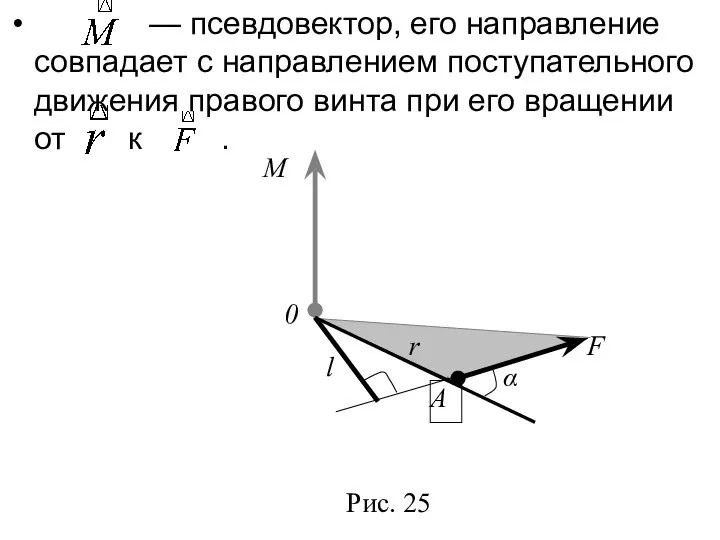
- 13. — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от к
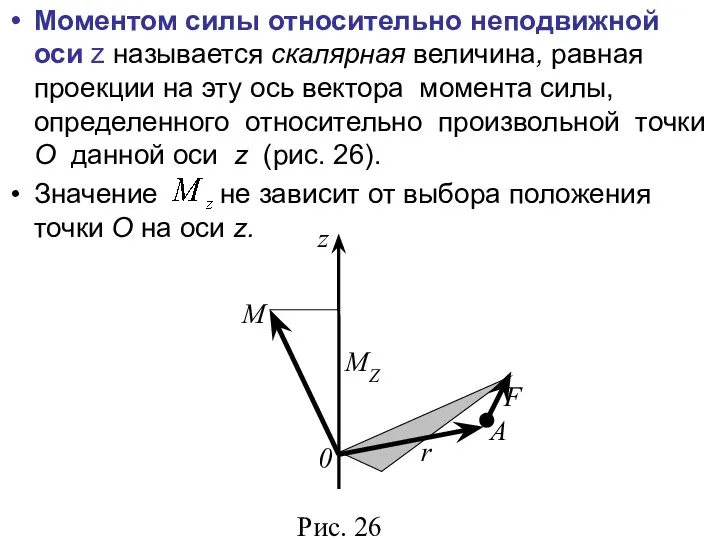
- 14. Моментом силы относительно неподвижной оси z называется скалярная величина, равная проекции на эту ось вектора момента
- 15. Если ось z совпадает с направлением вектора , то момент силы представляется в виде вектора, совпадающего
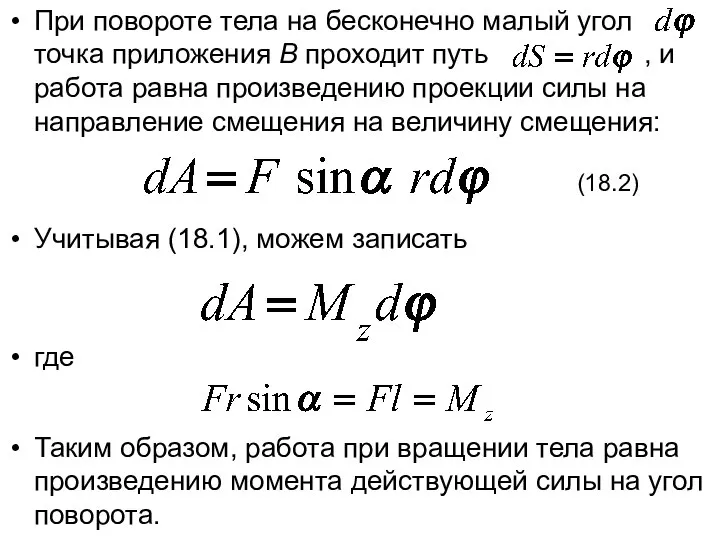
- 17. При повороте тела на бесконечно малый угол точка приложения В проходит путь , и работа равна
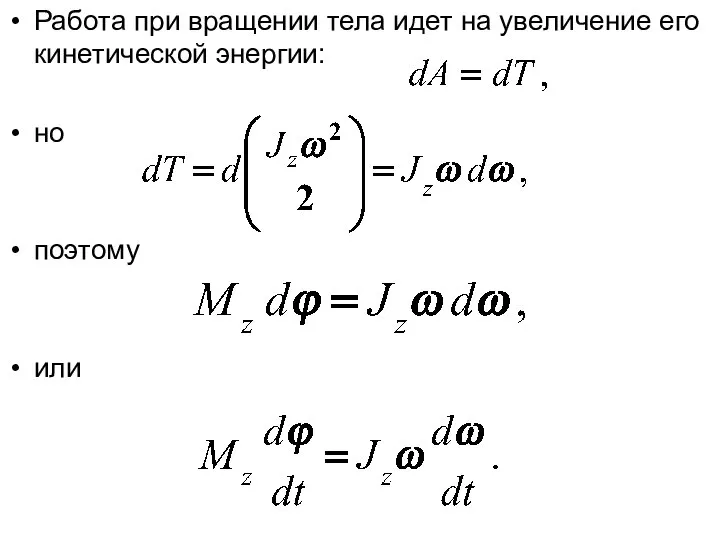
- 18. Работа при вращении тела идет на увеличение его кинетической энергии: но поэтому или
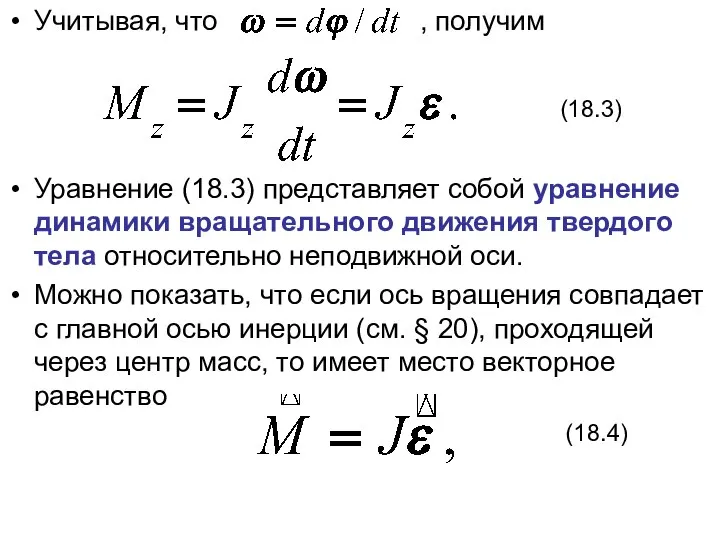
- 19. Учитывая, что , получим Уравнение (18.3) представляет собой уравнение динамики вращательного движения твердого тела относительно неподвижной
- 20. § 19. Момент импульса и закон его сохранения Моментом импульса (количества движения) материальной точки А относительно
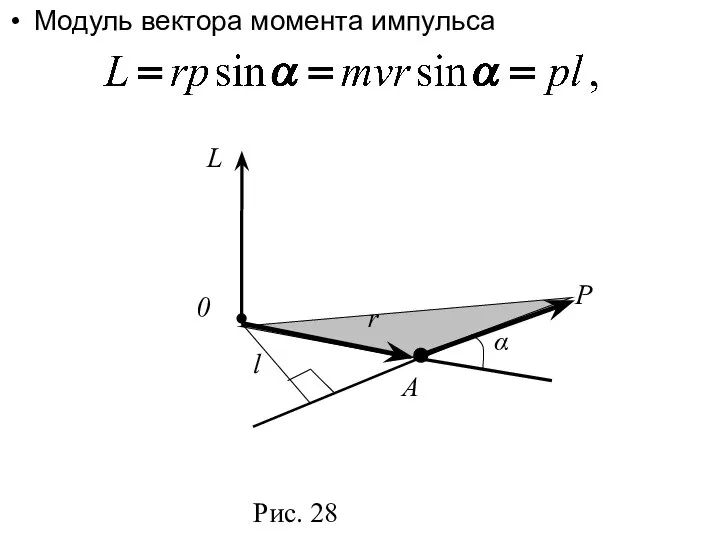
- 21. Модуль вектора момента импульса
- 22. Моментом импульса относительно неподвижной оси z называется скалярная величина , равная проекции на эту ось вектора
- 23. Поэтому можем записать, что момент импульса отдельной частицы и направлен по оси в сторону, определяемую правилом
- 24. Получим т.е. Продифференцируем уравнение (19.2) по времени: т.е. (19.2)
- 25. Можно показать, что имеет место векторное равенство В замкнутой системе и поэтому Выражение (19.4) представляет собой
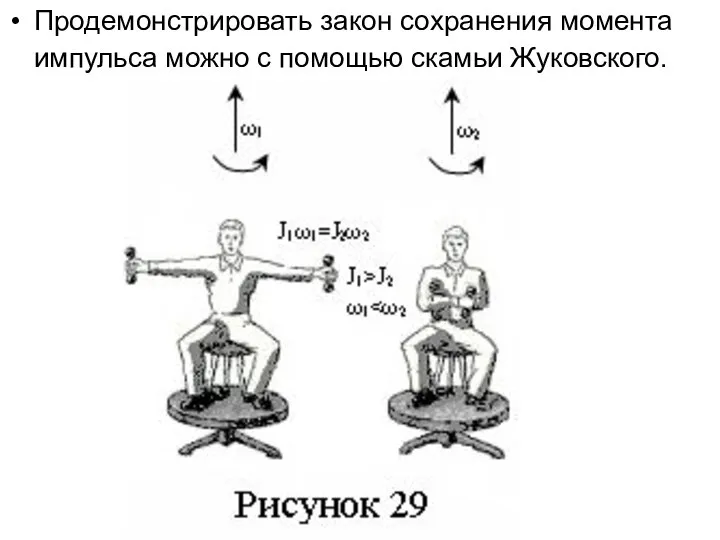
- 26. Продемонстрировать закон сохранения момента импульса можно с помощью скамьи Жуковского.
- 28. § 20. Свободные оси. Гироскоп Для того чтобы сохранить положение оси вращения твердого тела с течением
- 29. Главные оси инерции однородного прямоугольного параллелепипеда проходят через центры противоположных граней (рис. 30). Для однородного цилиндра
- 30. Свойство свободных осей сохранять свое положение в пространстве широко применяется в технике. Наиболее интересны в этом
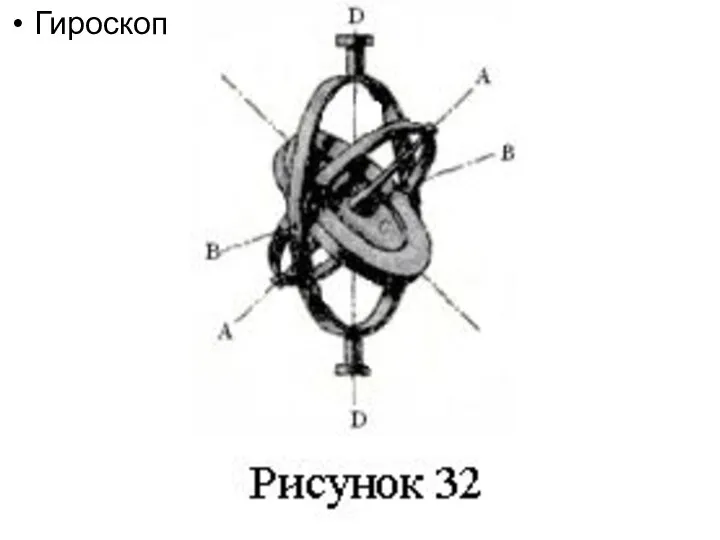
- 31. Гироскоп
- 32. § 21. Деформации твердого тела Рассматривая механику твердого тела, мы пользовались понятием абсолютно твердого тела. Однако
- 33. Реальные тела под действием внешних сил, как правило, испытывают упругие и пластические деформации, так как они
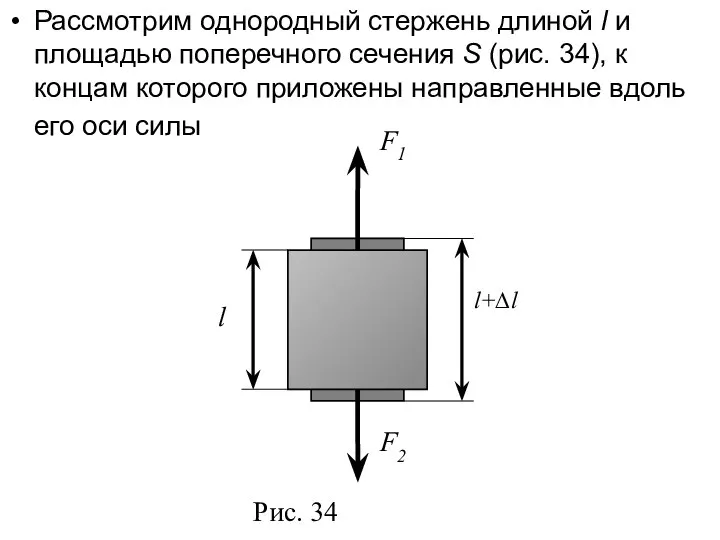
- 34. Рассмотрим однородный стержень длиной l и площадью поперечного сечения S (рис. 34), к концам которого приложены
- 35. Сила, действующая на единицу площади поперечного сечения, называется напряжением: Если сила направлена по нормали к поверхности,
- 36. Так, относительное изменение длины стержня (продольная деформация) относительное поперечное растяжение (сжатие) где d — диаметр стержня.
- 37. Английский физик Р. Гук экспериментально установил, что для малых деформаций относительное удлинение и напряжение прямо пропорциональны
- 38. Или где k — коэффициент упругости. Выражение (21.4) также задает закон Гука, согласно которому удлинение стержня
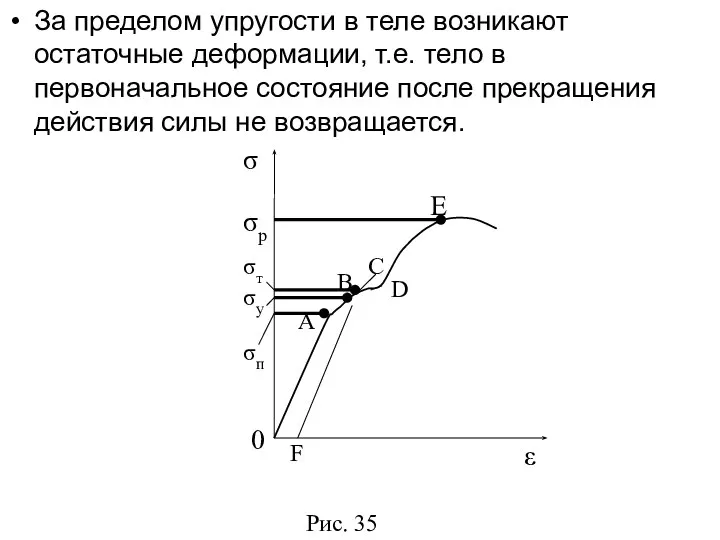
- 39. За пределом упругости в теле возникают остаточные деформации, т.е. тело в первоначальное состояние после прекращения действия
- 40. Напряжение, при котором появляется заметная остаточная деформация (≈ 0,2 %), называется пределом текучести ( ). При
- 41. Одно и то же твердое тело может при кратковременном действии сил проявлять себя как хрупкое, а
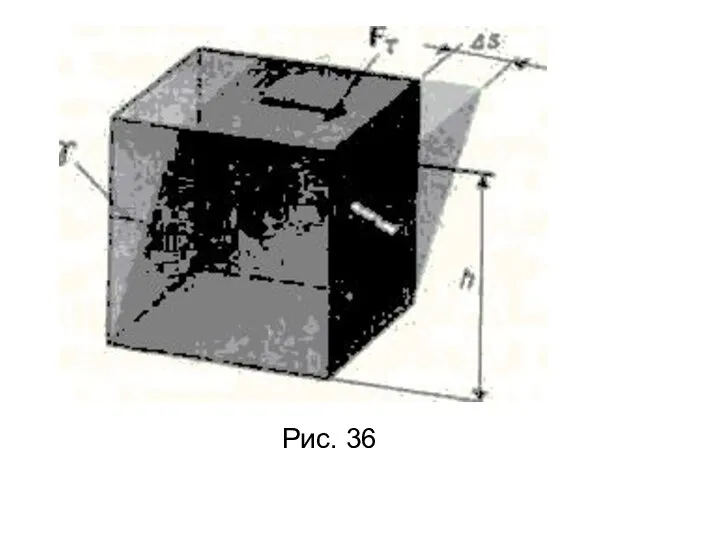
- 42. Поэтому т. е. потенциальная энергия упругорастянутого стержня пропорциональна квадрату деформации. Деформацию сдвига проще всего осуществить, если
- 43. Рис. 36
- 45. Скачать презентацию
Слайд 2В случае непрерывного распределения масс эта сумма сводится к интегралу
где интегрирование производится
В случае непрерывного распределения масс эта сумма сводится к интегралу
где интегрирование производится
Слайд 3В качестве примера найдем момент инерции однородного сплошного цилиндра высотой h и
В качестве примера найдем момент инерции однородного сплошного цилиндра высотой h и
Слайд 4Момент инерции каждого полого цилиндра dJ = r2dm (так как dr <<
Момент инерции каждого полого цилиндра dJ = r2dm (так как dr <<
Слайд 5Если известен момент инерции тела относительно оси, проходящей через его центр масс,

Слайд 7§ 17. Кинетическая энергия вращения
Рассмотрим
абсолютно
твердое тело,
вращающееся около
неподвижной оси
§ 17. Кинетическая энергия вращения
Рассмотрим
абсолютно
твердое тело,
вращающееся около
неподвижной оси

Слайд 8Мысленно разобьем это тело на маленькие объемы с элементарными массами , находящиеся
Мысленно разобьем это тело на маленькие объемы с элементарными массами , находящиеся
Слайд 9Кинетическую энергию вращающегося тела найдем как сумму кинетических энергий его элементарных объемов:
Или
Используя
Кинетическую энергию вращающегося тела найдем как сумму кинетических энергий его элементарных объемов:
Или
Используя
Слайд 10Таким образом, кинетическая энергия вращающегося тела
Из сравнения формулы (17.2) с выражением (12.1)
Таким образом, кинетическая энергия вращающегося тела
Из сравнения формулы (17.2) с выражением (12.1)
Слайд 11В случае плоского движения тела, например цилиндра, скатывающегося с наклонной плоскости без
В случае плоского движения тела, например цилиндра, скатывающегося с наклонной плоскости без
Слайд 12§ 18. Момент силы. Уравнение динамики вращательного движения твердого тела
Моментом силы F
§ 18. Момент силы. Уравнение динамики вращательного движения твердого тела
Моментом силы F
Слайд 13 — псевдовектор, его направление совпадает с направлением поступательного движения правого винта
— псевдовектор, его направление совпадает с направлением поступательного движения правого винта
Слайд 14Моментом силы относительно неподвижной оси z называется скалярная величина, равная проекции на
Моментом силы относительно неподвижной оси z называется скалярная величина, равная проекции на
Слайд 15Если ось z совпадает с направлением вектора , то момент силы представляется
Если ось z совпадает с направлением вектора , то момент силы представляется
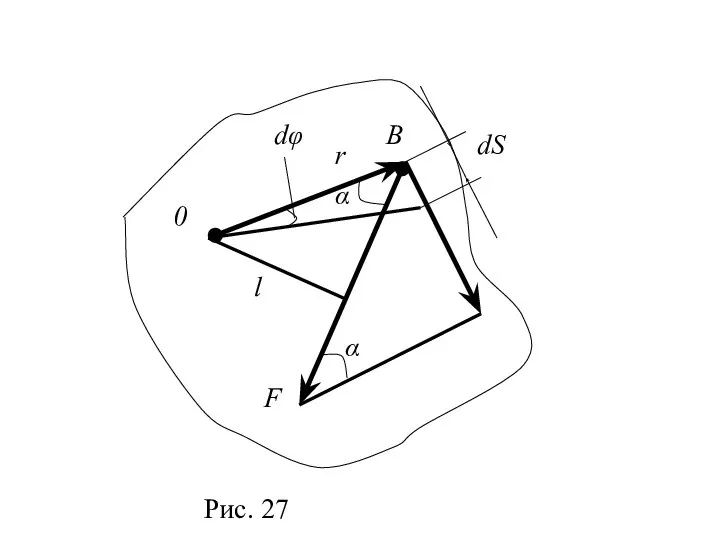
Слайд 17При повороте тела на бесконечно малый угол точка приложения В проходит путь
При повороте тела на бесконечно малый угол точка приложения В проходит путь
Слайд 18Работа при вращении тела идет на увеличение его кинетической энергии:
но
поэтому
или
Работа при вращении тела идет на увеличение его кинетической энергии:
но
поэтому
или
Слайд 19Учитывая, что , получим
Уравнение (18.3) представляет собой уравнение динамики вращательного движения твердого
Учитывая, что , получим
Уравнение (18.3) представляет собой уравнение динамики вращательного движения твердого
Слайд 20§ 19. Момент импульса и
закон его сохранения
Моментом импульса (количества движения) материальной
§ 19. Момент импульса и
закон его сохранения
Моментом импульса (количества движения) материальной
Слайд 21Модуль вектора момента импульса
Модуль вектора момента импульса
Слайд 22Моментом импульса относительно неподвижной оси z называется скалярная величина , равная проекции
Моментом импульса относительно неподвижной оси z называется скалярная величина , равная проекции
Слайд 23Поэтому можем записать, что момент импульса отдельной частицы
и направлен по оси в
Поэтому можем записать, что момент импульса отдельной частицы
и направлен по оси в
Слайд 24Получим
т.е.
Продифференцируем уравнение (19.2) по времени:
т.е.
(19.2)
Получим
т.е.
Продифференцируем уравнение (19.2) по времени:
т.е.
(19.2)
Слайд 25Можно показать, что имеет место векторное равенство
В замкнутой системе и
поэтому
Выражение (19.4)
Можно показать, что имеет место векторное равенство
В замкнутой системе и
поэтому
Выражение (19.4)
Слайд 26Продемонстрировать закон сохранения момента импульса можно с помощью скамьи Жуковского.
Продемонстрировать закон сохранения момента импульса можно с помощью скамьи Жуковского.

Слайд 28§ 20. Свободные оси. Гироскоп
Для того чтобы сохранить положение оси вращения твердого
§ 20. Свободные оси. Гироскоп
Для того чтобы сохранить положение оси вращения твердого
Слайд 29Главные оси инерции однородного прямоугольного параллелепипеда проходят через центры противоположных граней (рис.
Главные оси инерции однородного прямоугольного параллелепипеда проходят через центры противоположных граней (рис.
Слайд 30Свойство свободных осей сохранять свое положение в пространстве широко применяется в технике.
Наиболее
Свойство свободных осей сохранять свое положение в пространстве широко применяется в технике.
Наиболее
Слайд 31Гироскоп
Гироскоп
Слайд 32§ 21. Деформации твердого тела
Рассматривая механику твердого тела, мы пользовались понятием абсолютно
§ 21. Деформации твердого тела
Рассматривая механику твердого тела, мы пользовались понятием абсолютно
Слайд 33Реальные тела под действием внешних сил, как правило, испытывают упругие и пластические
Реальные тела под действием внешних сил, как правило, испытывают упругие и пластические
Слайд 34Рассмотрим однородный стержень длиной l и площадью поперечного сечения S (рис. 34),
Рассмотрим однородный стержень длиной l и площадью поперечного сечения S (рис. 34),
Слайд 35Сила, действующая на единицу площади поперечного сечения, называется напряжением:
Если сила направлена по
Сила, действующая на единицу площади поперечного сечения, называется напряжением:
Если сила направлена по
Слайд 36Так, относительное изменение длины стержня (продольная деформация)
относительное поперечное растяжение (сжатие)
где d
Так, относительное изменение длины стержня (продольная деформация)
относительное поперечное растяжение (сжатие)
где d
Слайд 37Английский физик Р. Гук экспериментально установил, что для малых деформаций относительное удлинение
Английский физик Р. Гук экспериментально установил, что для малых деформаций относительное удлинение
Слайд 38Или
где k — коэффициент упругости.
Выражение (21.4) также задает закон Гука, согласно
Или
где k — коэффициент упругости.
Выражение (21.4) также задает закон Гука, согласно
Слайд 39За пределом упругости в теле возникают остаточные деформации, т.е. тело в первоначальное
За пределом упругости в теле возникают остаточные деформации, т.е. тело в первоначальное
Слайд 40Напряжение, при котором появляется заметная остаточная деформация (≈ 0,2 %), называется пределом
Напряжение, при котором появляется заметная остаточная деформация (≈ 0,2 %), называется пределом
Слайд 41Одно и то же твердое тело может при кратковременном действии сил проявлять
Одно и то же твердое тело может при кратковременном действии сил проявлять
Слайд 42Поэтому
т. е. потенциальная энергия упругорастянутого стержня пропорциональна квадрату деформации.
Деформацию сдвига проще
Поэтому
т. е. потенциальная энергия упругорастянутого стержня пропорциональна квадрату деформации.
Деформацию сдвига проще
Слайд 43Рис. 36
Рис. 36
 Механическое движение. Движется или не движется?
Механическое движение. Движется или не движется? Механические волны
Механические волны Показатели качества электроэнергии. Влияние качества электроэнергии на работу электроприемников зданий
Показатели качества электроэнергии. Влияние качества электроэнергии на работу электроприемников зданий Экспериментальный ветрогенератор
Экспериментальный ветрогенератор Презентация на тему Электромагнитная индукция. Опыты Фарадея
Презентация на тему Электромагнитная индукция. Опыты Фарадея  Автоматическое управление движением судном
Автоматическое управление движением судном Типы соединений потребителей тока
Типы соединений потребителей тока Порядок решения задач на резьбовые соединения
Порядок решения задач на резьбовые соединения Закон всемирного тяготения. Решение задач
Закон всемирного тяготения. Решение задач Основы молекулярной физики
Основы молекулярной физики Моделирование звуковых волн. Математические модели реальных процессов в природе и обществе
Моделирование звуковых волн. Математические модели реальных процессов в природе и обществе Принцип работы 4-х тактного бензинового двигателя
Принцип работы 4-х тактного бензинового двигателя Контроль формы оптических поверхностей пробным стеклом, на интерферометре Физо и на неравноплечем лазерном интерферометре
Контроль формы оптических поверхностей пробным стеклом, на интерферометре Физо и на неравноплечем лазерном интерферометре Аккумулирование энергии
Аккумулирование энергии Презентация на тему Законы термодинамики
Презентация на тему Законы термодинамики  Электромагнитное поле
Электромагнитное поле Двигатель Стирлинга
Двигатель Стирлинга Титрование с применением флюоресцентных индикаторов
Титрование с применением флюоресцентных индикаторов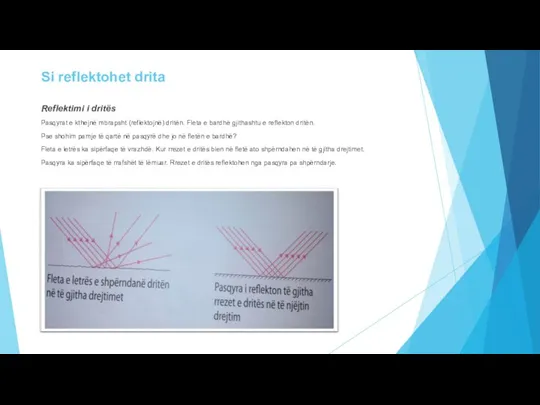 Reflektimi i drites
Reflektimi i drites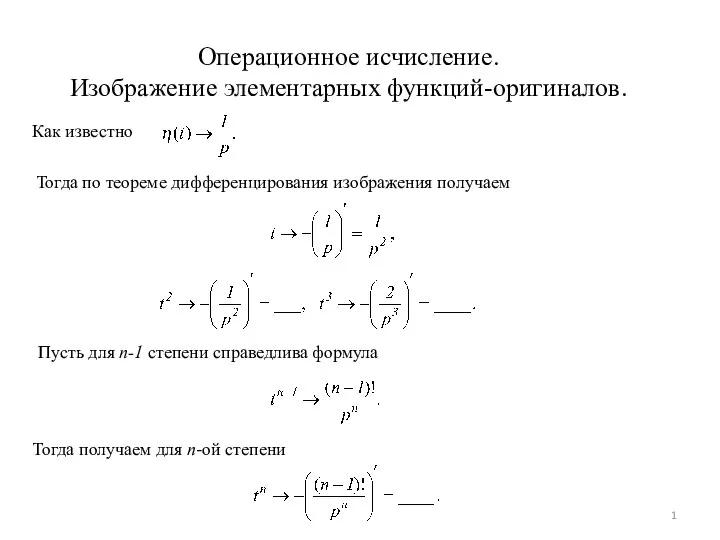 Лекция 4(ОИ) (студентам)
Лекция 4(ОИ) (студентам) Применение ядерной энергии
Применение ядерной энергии Патент на изобретение. На примере хроматографа
Патент на изобретение. На примере хроматографа Сообщение о телевидении
Сообщение о телевидении Презентация на тему История открытия законов сохранения импульса
Презентация на тему История открытия законов сохранения импульса  Цепные ядерные реакции. Ядерный реактор
Цепные ядерные реакции. Ядерный реактор ProMet: innovative hammerless system for bucket protection
ProMet: innovative hammerless system for bucket protection Разработка комбинированного стенда для диагностики технического состояния тормозов грузовых автомобилей
Разработка комбинированного стенда для диагностики технического состояния тормозов грузовых автомобилей Наблюдения и опыты
Наблюдения и опыты