- Кинематика_ _Лекция 1_ (1)

Содержание
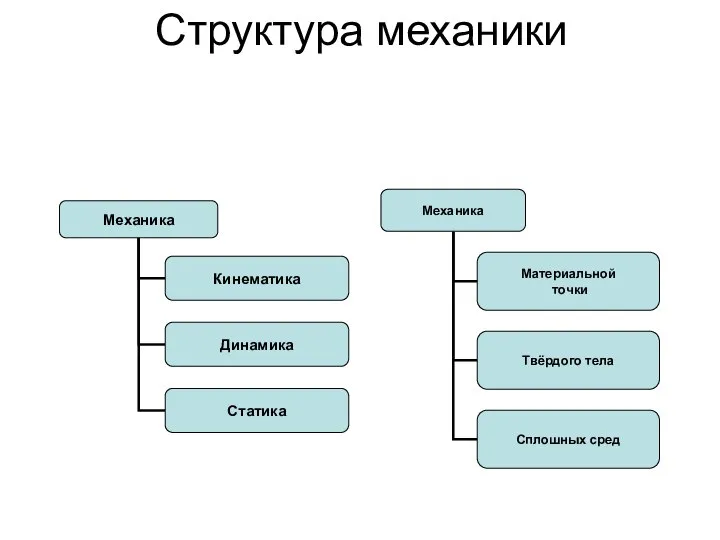
- 2. Структура механики
- 3. Основные понятия механики Основная задача механики – зная состояние системы в начальный момент времени и законы,
- 4. Кинематика - наука, изучающая состояние движения независимо от вызывающих его сил, и получившая название от греческого
- 5. Кинематику называют геометрией четырех измерений, так как она имеет дело с тремя координатами пространства и еще
- 6. Некоторые сведения о векторах Вектором будем называть величину, характеризующуюся численным значением (модулем) и направлением в пространстве,
- 7. Векторы и скаляры. Величины, которые полностью определяются только числовыми значениями, называются скалярами. Величины, для полной характеристики
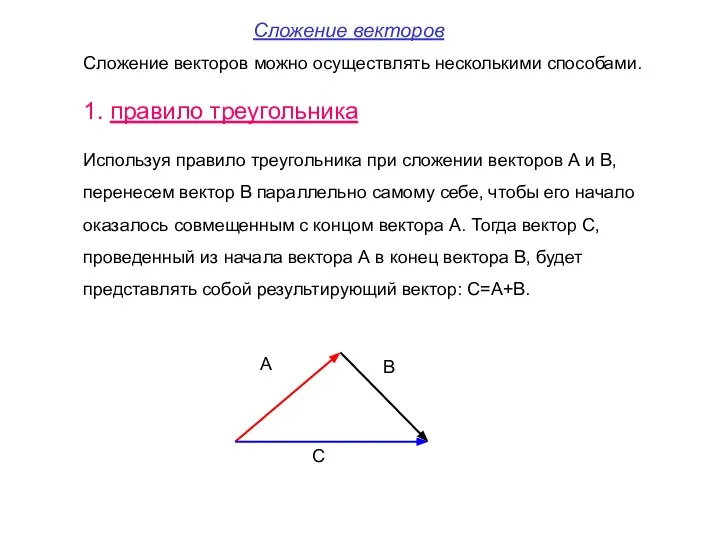
- 8. Сложение векторов можно осуществлять несколькими способами. 1. правило треугольника Используя правило треугольника при сложении векторов А
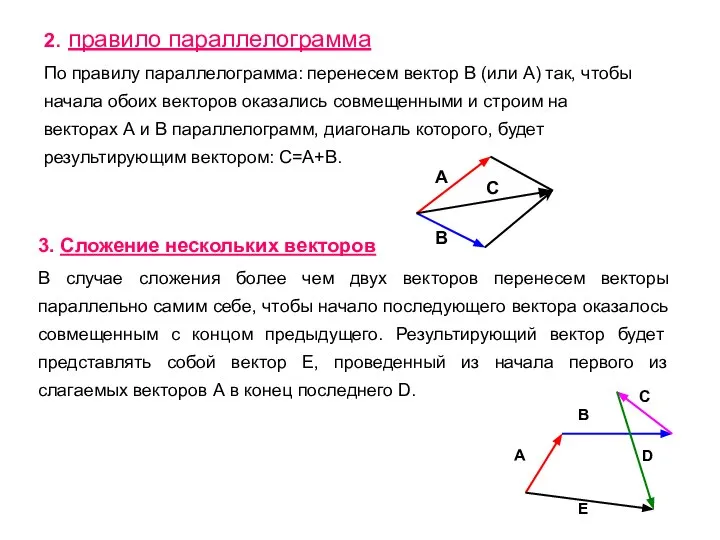
- 9. 2. правило параллелограмма По правилу параллелограмма: перенесем вектор В (или А) так, чтобы начала обоих векторов
- 10. При вычитание векторов конец вычитаемого вектора соединяется с концом уменьшаемого вектора. Скалярное произведение векторов это скаляр.
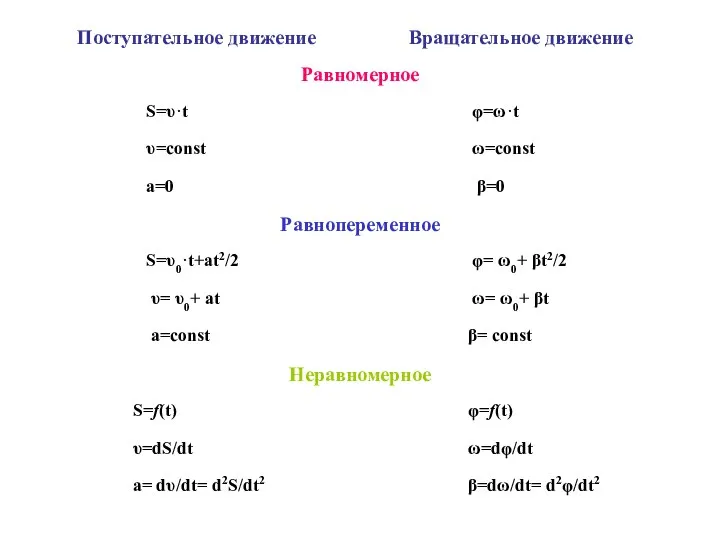
- 11. Основные понятия механики Поступательное движение – такое, при котором любая прямая, связанная с телом перемещается параллельно
- 12. Кинематика поступательного движения При поступательном движении тела все точки тела движутся одинаково, и, вместо того чтобы
- 13. Основные понятия кинематики Кинематикой называют раздел механики, в котором движение тел рассматривается без выяснения причин этого
- 14. Система координат состоит из осей, для определения пространственных координат тела и часов Траектория – это линия,
- 15. Рассмотрение любого движения начинают с выбора системы отсчета, включающей в себя: тело отсчета, систему координат и
- 16. Тело отсчёта Движение одного и того же тела относительно разных тел оказывается различным. Для описания движения
- 17. Материальная точка - модель тела, размерами которого в рассматриваемых условиях можно пренебречь. Траектория - линия, вдоль
- 18. Положение тела в пространстве задается радиус - вектором или тремя его проекциями на оси координат. Положение
- 19. Следовательно закон движения - это зависимость радиус-вектора от времени или зависимость координат во времени. где -
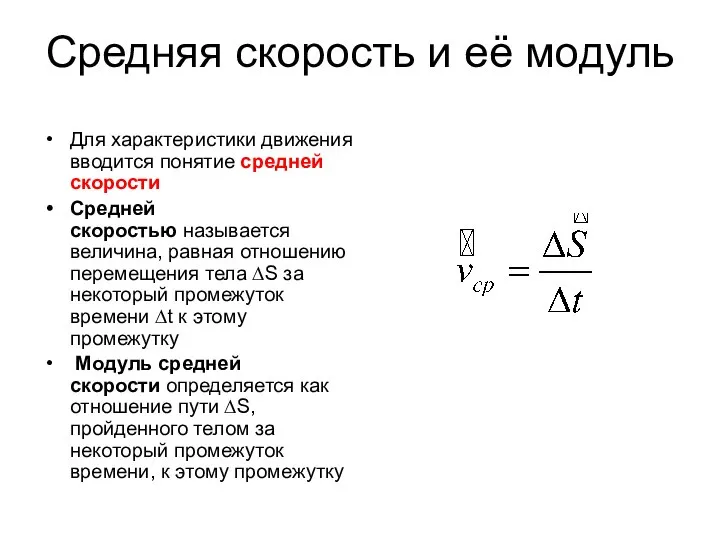
- 20. Средняя скорость и её модуль Для характеристики движения вводится понятие средней скорости Средней скоростью называется величина,
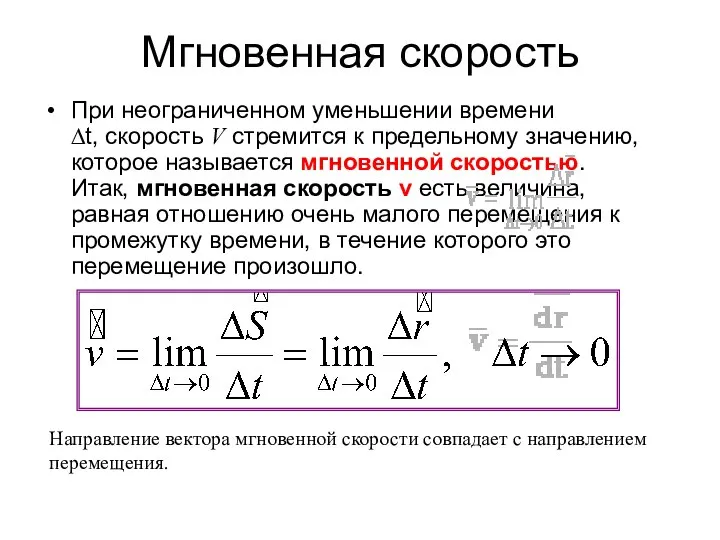
- 21. Мгновенная скорость При неограниченном уменьшении времени ∆t, скорость V стремится к предельному значению, которое называется мгновенной
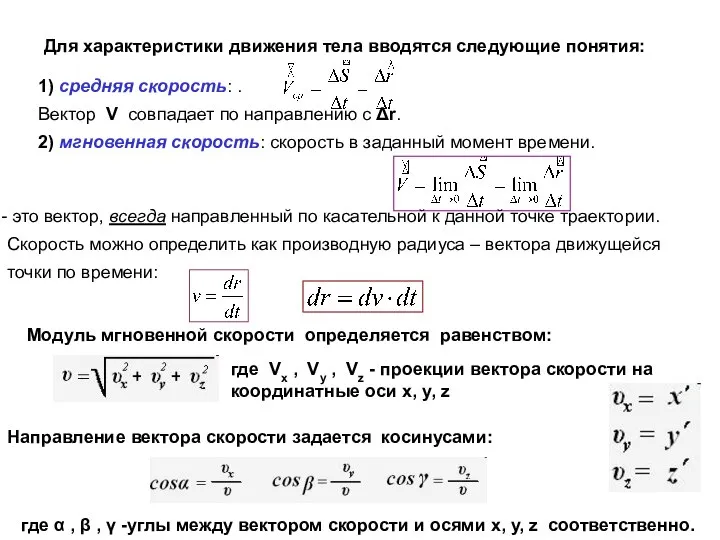
- 22. Для характеристики движения тела вводятся следующие понятия: 1) средняя скорость: . Вектор V совпадает по направлению
- 23. Равнопеременным называется движение, при котором скорость тела (материальной точки) за любые равные промежутки времени изменяется одинаково,
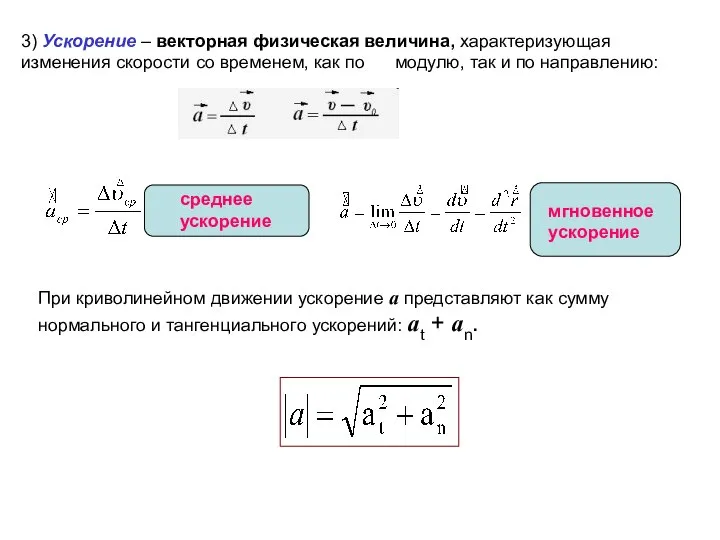
- 24. 3) Ускорение – векторная физическая величина, характеризующая изменения скорости со временем, как по модулю, так и
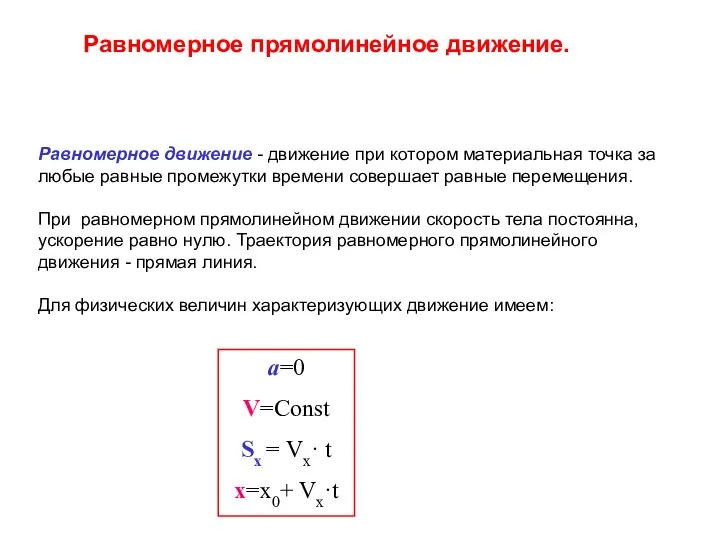
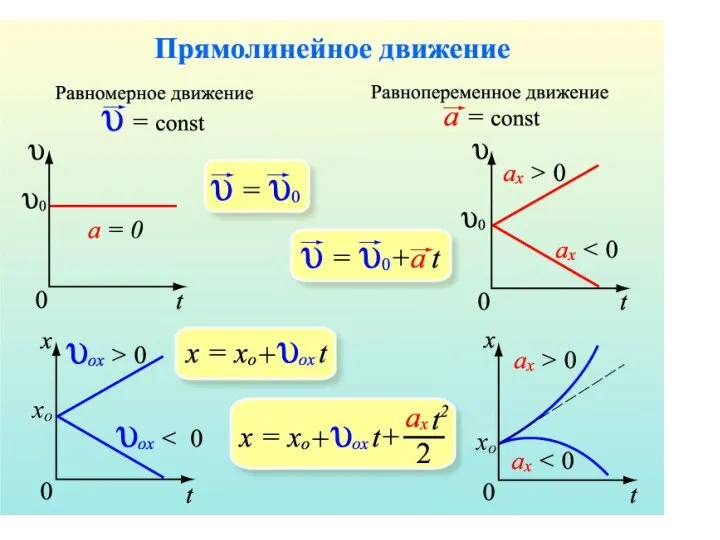
- 25. Равномерное прямолинейное движение. Равномерное движение - движение при котором материальная точка за любые равные промежутки времени
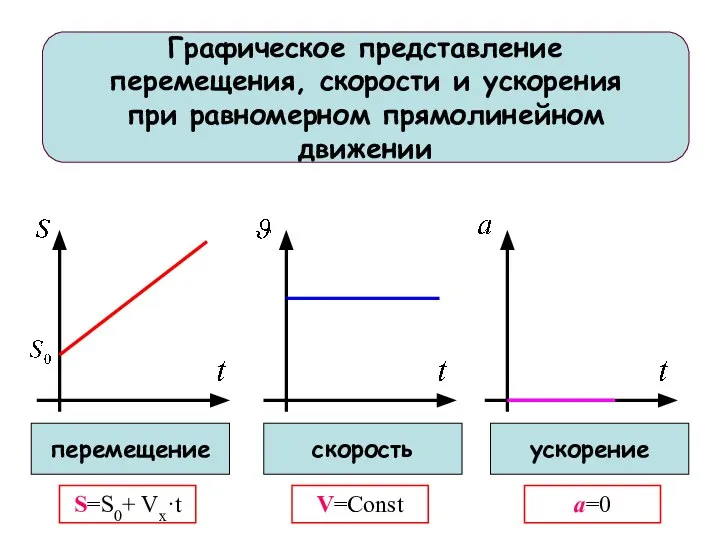
- 26. Графическое представление перемещения, скорости и ускорения при равномерном прямолинейном движении перемещение скорость ускорение S=S0+ Vx·t V=Const
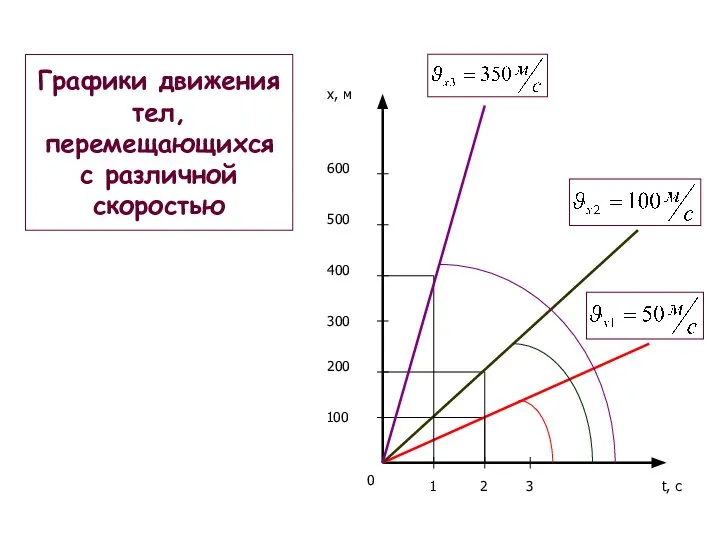
- 27. Графики движения тел, перемещающихся с различной скоростью 0 1 2 3 t, с 100 200 300
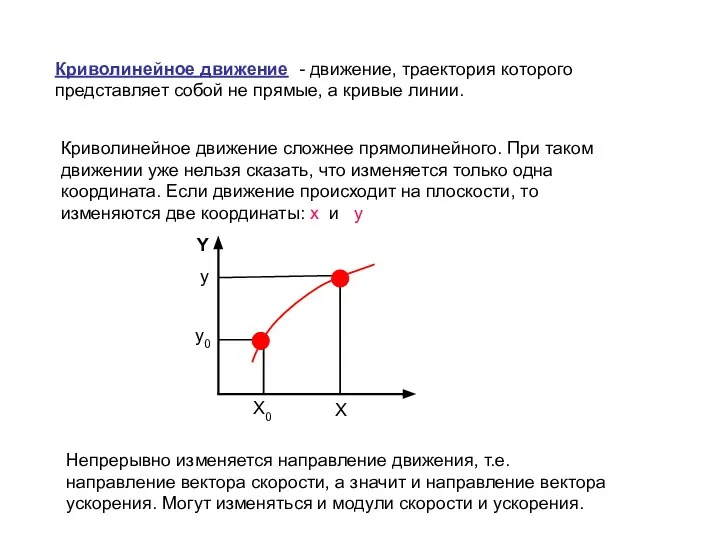
- 28. Криволинейное движение - движение, траектория которого представляет собой не прямые, а кривые линии. Криволинейное движение сложнее
- 29. Неравномерное движение Движение, при котором за равные промежутки времени тело совершает неравные перемещения называют неравномерным или
- 30. скорость По определению тогда скорость равноускоренного движения При записи уравнения в проекции векторов на координатную ось
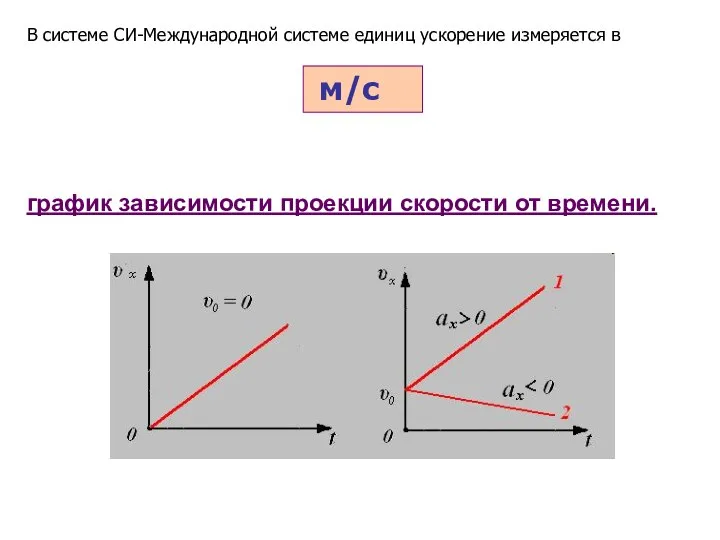
- 31. график зависимости проекции скорости от времени. м/с В системе СИ-Международной системе единиц ускорение измеряется в
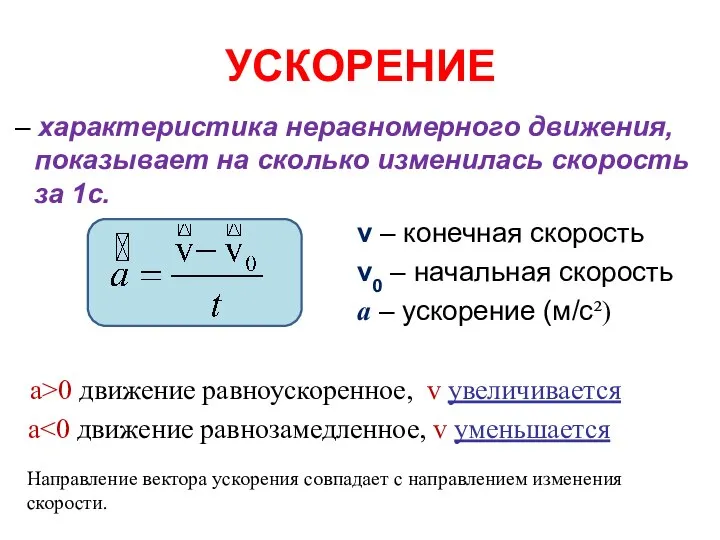
- 32. УСКОРЕНИЕ – характеристика неравномерного движения, показывает на сколько изменилась скорость за 1с. v – конечная скорость
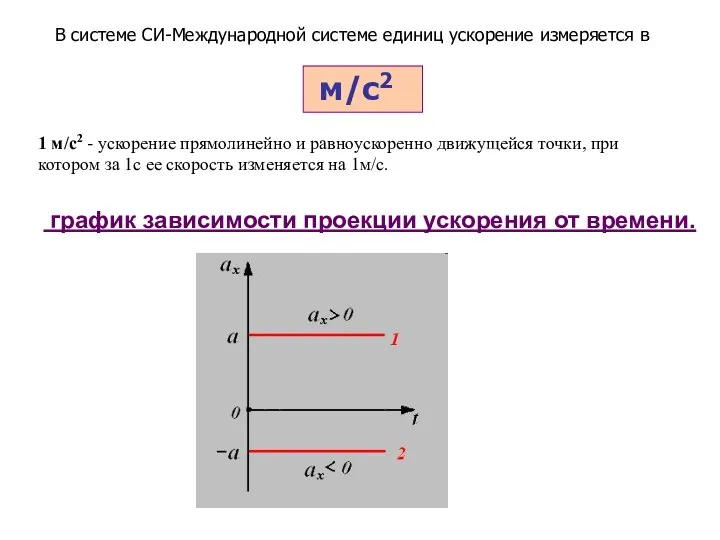
- 33. график зависимости проекции ускорения от времени. В системе СИ-Международной системе единиц ускорение измеряется в м/с2 1
- 34. перемещение Второй вариант формулы нахождения перемещения: (1) Подставим это выражение в формулу (1). откуда
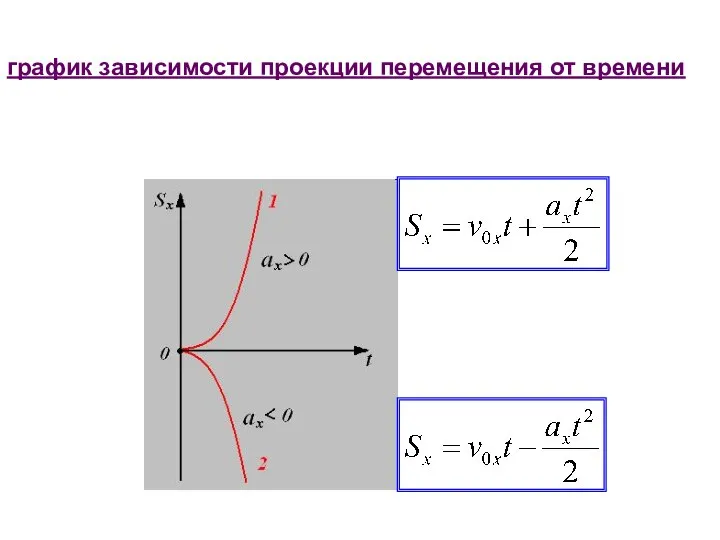
- 35. график зависимости проекции перемещения от времени
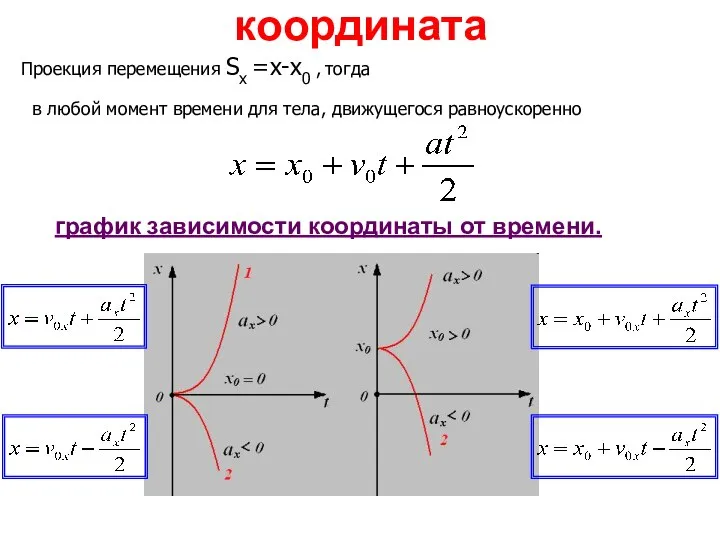
- 36. координата график зависимости координаты от времени. в любой момент времени для тела, движущегося равноускоренно Проекция перемещения
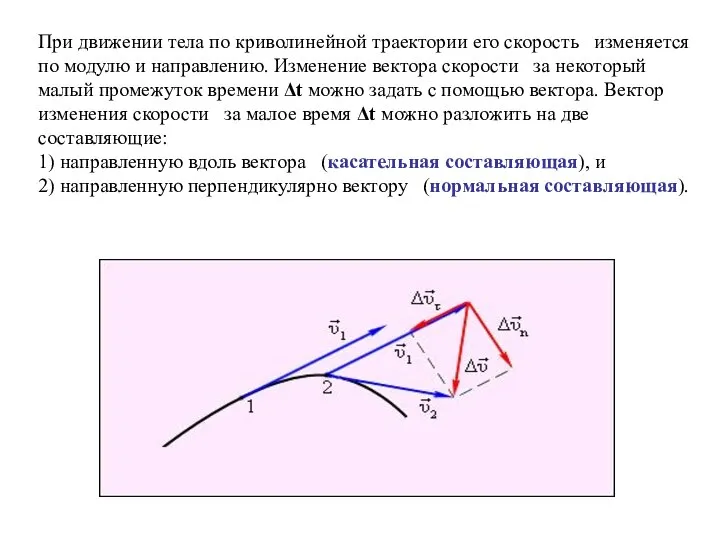
- 39. При движении тела по криволинейной траектории его скорость изменяется по модулю и направлению. Изменение вектора скорости
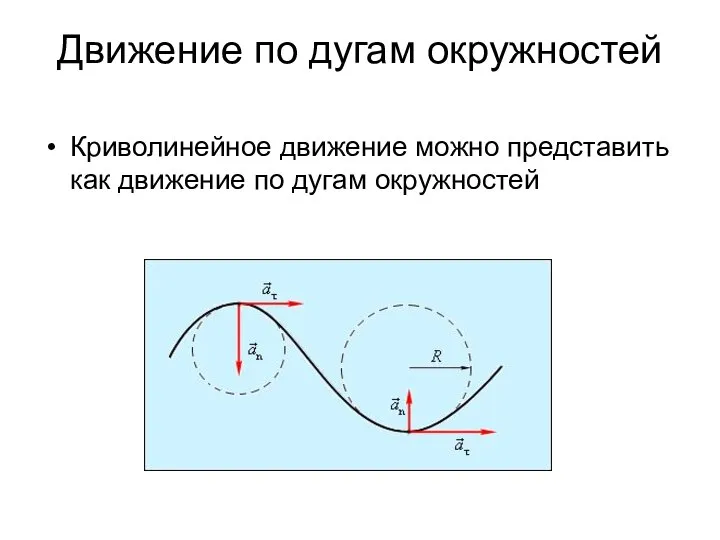
- 40. Движение по дугам окружностей Криволинейное движение можно представить как движение по дугам окружностей
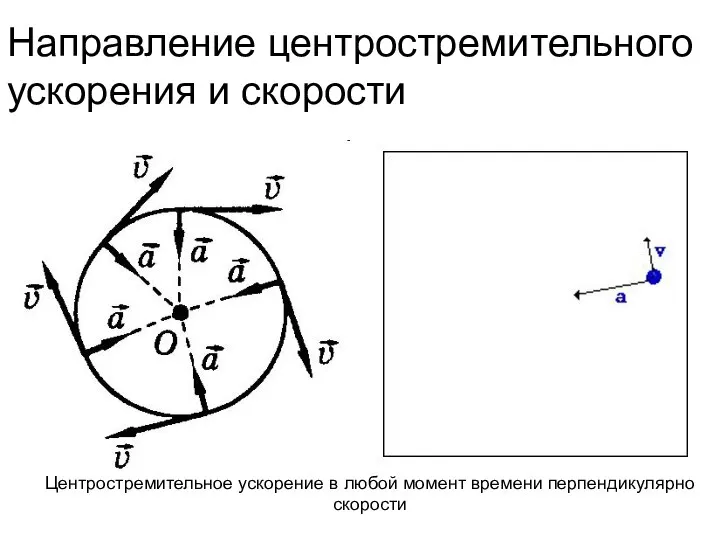
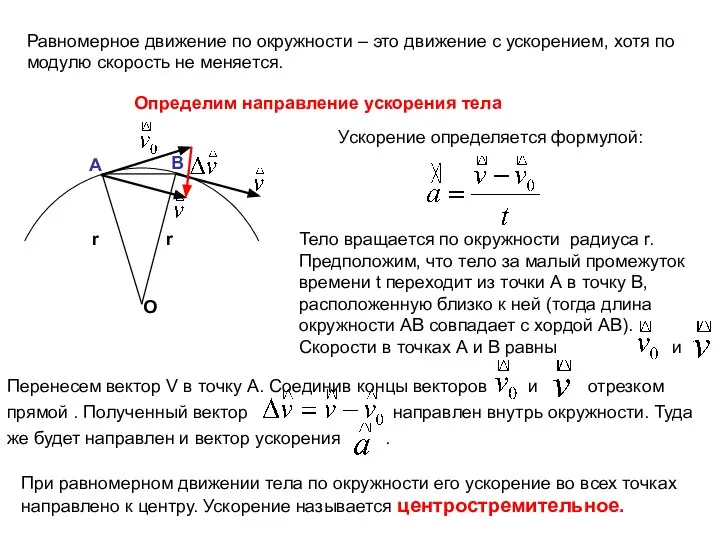
- 41. Направление центростремительного ускорения и скорости Центростремительное ускорение в любой момент времени перпендикулярно скорости
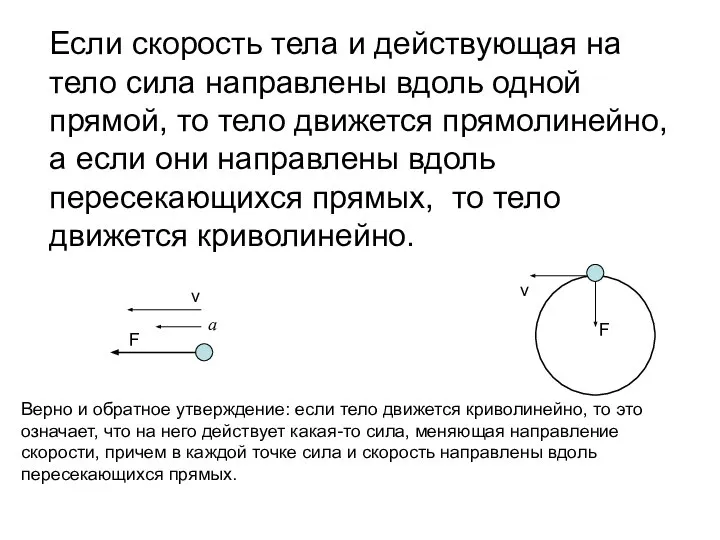
- 42. Если скорость тела и действующая на тело сила направлены вдоль одной прямой, то тело движется прямолинейно,
- 43. Движение тела по окружности с постоянной по модулю скоростью
- 44. Равномерное движение по окружности – это движение с ускорением, хотя по модулю скорость не меняется. Определим
- 45. Чему равен модуль центростремительного ускорения? Треугольник из векторов и равнобедренный, т.к. Треугольник ОАВ тоже равнобедренный (ОА
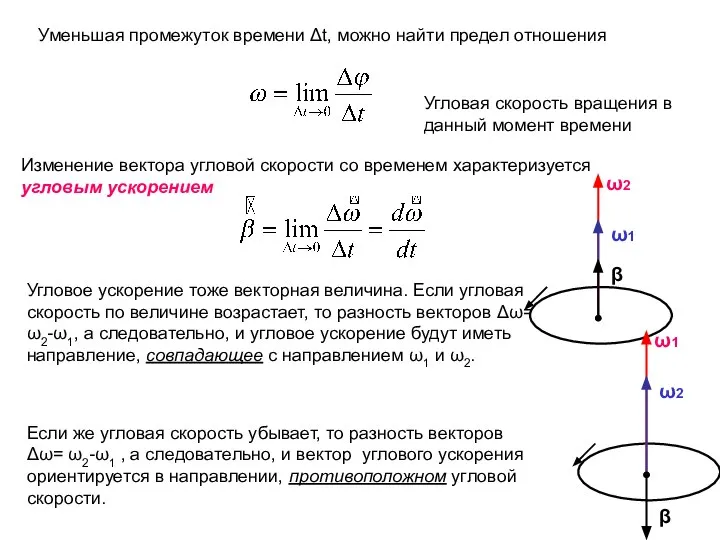
- 46. отношение длины дуги к радиусу окружности (ΔS/R=Δφ) равно центральному углу, выраженному в радианах ΔS=R·Δφ. Угловая скорость
- 47. Угловое ускорение тоже векторная величина. Если угловая скорость по величине возрастает, то разность векторов Δω= ω2-ω1,
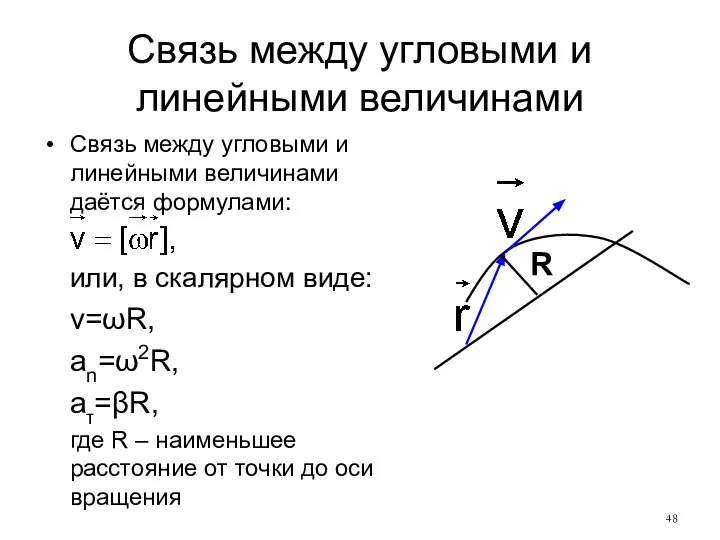
- 48. Связь между угловыми и линейными величинами Связь между угловыми и линейными величинами даётся формулами: или, в
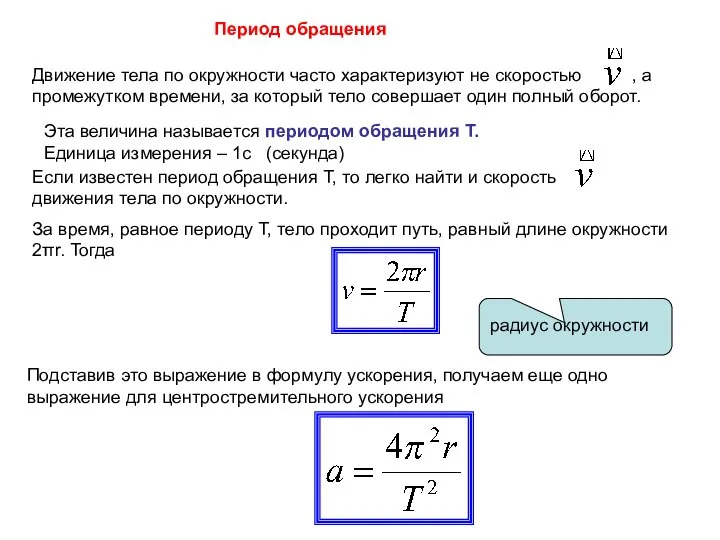
- 49. Период обращения Движение тела по окружности часто характеризуют не скоростью , а промежутком времени, за который
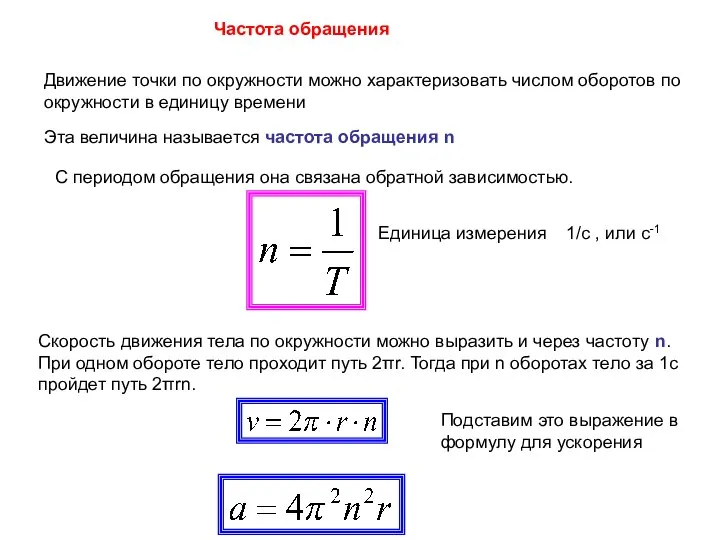
- 50. Частота обращения Движение точки по окружности можно характеризовать числом оборотов по окружности в единицу времени Эта
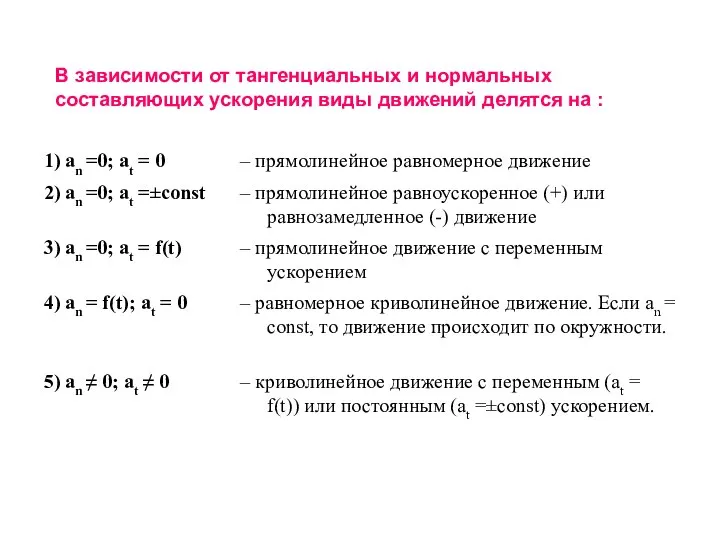
- 51. В зависимости от тангенциальных и нормальных составляющих ускорения виды движений делятся на :
- 54. Скачать презентацию
Слайд 3Основные понятия механики
Основная задача механики – зная состояние системы в начальный момент
Основные понятия механики
Основная задача механики – зная состояние системы в начальный момент
Слайд 4
Кинематика - наука, изучающая состояние движения независимо от вызывающих его сил, и
Кинематика - наука, изучающая состояние движения независимо от вызывающих его сил, и
Слайд 5Кинематику называют геометрией четырех измерений, так как она имеет дело с тремя
Кинематику называют геометрией четырех измерений, так как она имеет дело с тремя
Слайд 6Некоторые сведения о векторах
Вектором будем называть величину, характеризующуюся численным значением (модулем) и
Некоторые сведения о векторах
Вектором будем называть величину, характеризующуюся численным значением (модулем) и
Слайд 7Векторы и скаляры.
Величины, которые полностью определяются только числовыми значениями, называются скалярами.
Векторы и скаляры.
Величины, которые полностью определяются только числовыми значениями, называются скалярами.
Слайд 8Сложение векторов можно осуществлять несколькими способами.
1. правило треугольника
Используя правило треугольника
Сложение векторов можно осуществлять несколькими способами.
1. правило треугольника
Используя правило треугольника
Слайд 92. правило параллелограмма
По правилу параллелограмма: перенесем вектор В (или А) так, чтобы
2. правило параллелограмма
По правилу параллелограмма: перенесем вектор В (или А) так, чтобы
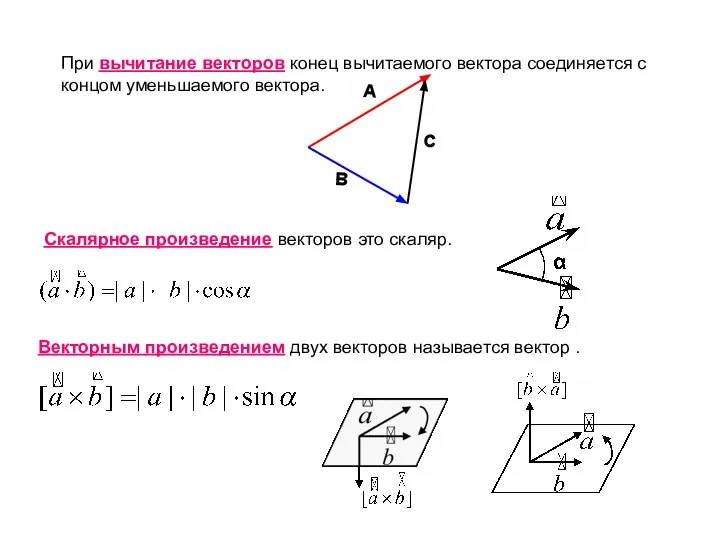
Слайд 10При вычитание векторов конец вычитаемого вектора соединяется с концом уменьшаемого вектора.
Скалярное
При вычитание векторов конец вычитаемого вектора соединяется с концом уменьшаемого вектора.
Скалярное
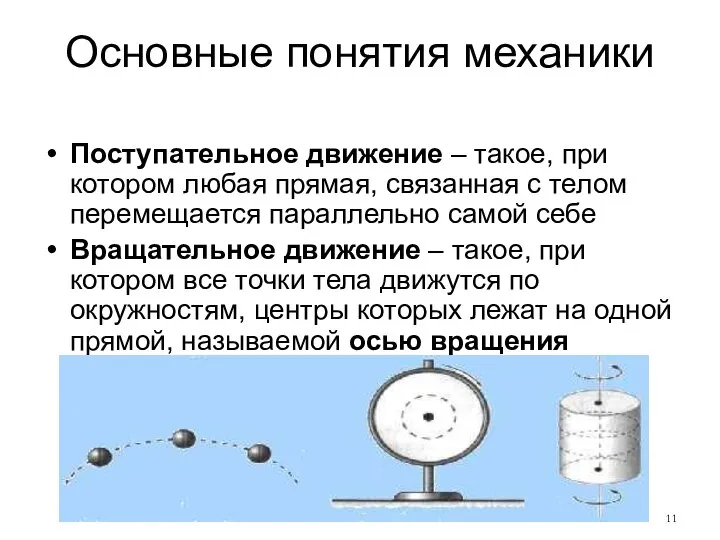
Слайд 11Основные понятия механики
Поступательное движение – такое, при котором любая прямая, связанная с
Основные понятия механики
Поступательное движение – такое, при котором любая прямая, связанная с
Слайд 12Кинематика поступательного движения
При поступательном движении тела все точки тела движутся одинаково, и,
Кинематика поступательного движения
При поступательном движении тела все точки тела движутся одинаково, и,
Слайд 13 Основные понятия кинематики
Кинематикой называют раздел механики, в котором движение тел рассматривается без
Основные понятия кинематики
Кинематикой называют раздел механики, в котором движение тел рассматривается без
Слайд 14Система координат состоит из осей, для определения пространственных координат тела и часов
Траектория
Система координат состоит из осей, для определения пространственных координат тела и часов
Траектория
Слайд 15Рассмотрение любого движения начинают с выбора системы отсчета, включающей в себя:
тело
Рассмотрение любого движения начинают с выбора системы отсчета, включающей в себя:
тело
Слайд 16Тело отсчёта
Движение одного и того же тела относительно разных тел оказывается различным.
Тело отсчёта
Движение одного и того же тела относительно разных тел оказывается различным.
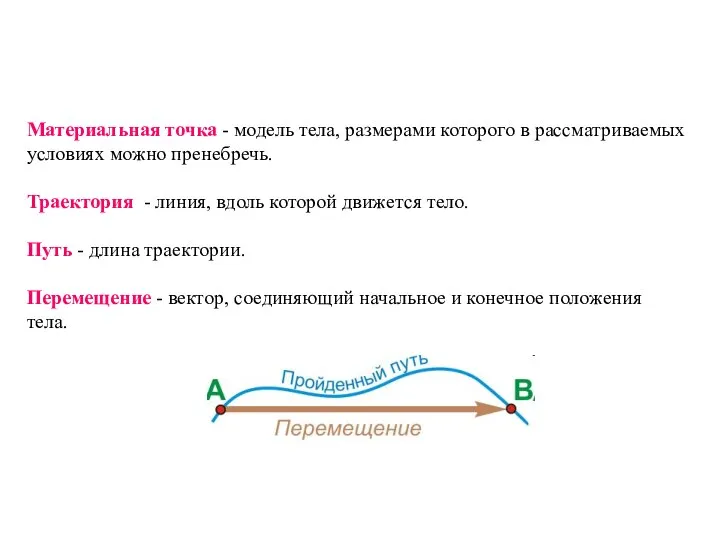
Слайд 17Материальная точка - модель тела, размерами которого в рассматриваемых условиях можно пренебречь.
Траектория
Траектория
Слайд 18Положение тела в пространстве задается радиус - вектором или тремя его проекциями
Положение тела в пространстве задается радиус - вектором или тремя его проекциями
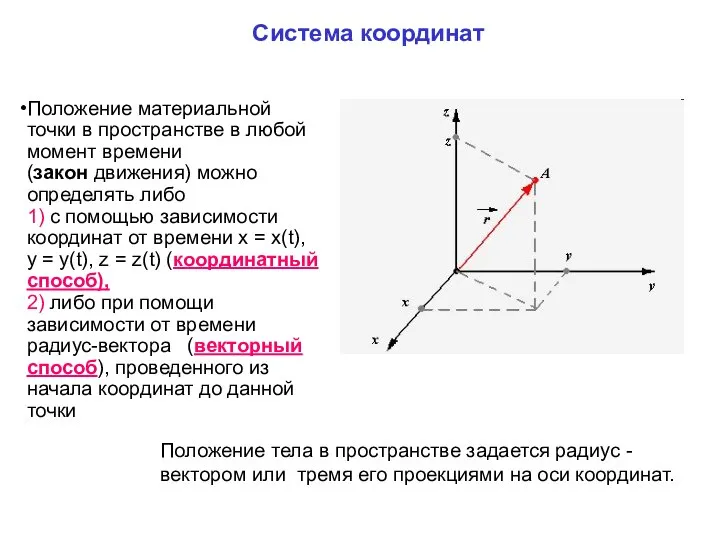
Слайд 19Следовательно закон движения - это зависимость радиус-вектора от времени или зависимость координат
Следовательно закон движения - это зависимость радиус-вектора от времени или зависимость координат
Слайд 20Средняя скорость и её модуль
Для характеристики движения вводится понятие средней скорости
Средней
Средняя скорость и её модуль
Для характеристики движения вводится понятие средней скорости
Средней
Слайд 21Мгновенная скорость
При неограниченном уменьшении времени ∆t, скорость V стремится к предельному значению, которое называется мгновенной
Мгновенная скорость
При неограниченном уменьшении времени ∆t, скорость V стремится к предельному значению, которое называется мгновенной
Слайд 22Для характеристики движения тела вводятся следующие понятия:
1) средняя скорость: .
Вектор V
Для характеристики движения тела вводятся следующие понятия:
1) средняя скорость: .
Вектор V
Слайд 23Равнопеременным называется движение, при котором скорость тела (материальной точки) за любые равные промежутки
Равнопеременным называется движение, при котором скорость тела (материальной точки) за любые равные промежутки
Слайд 243) Ускорение – векторная физическая величина, характеризующая изменения скорости со временем, как
3) Ускорение – векторная физическая величина, характеризующая изменения скорости со временем, как
Слайд 25Равномерное прямолинейное движение.
Равномерное движение - движение при котором материальная точка за любые
Равномерное прямолинейное движение.
Равномерное движение - движение при котором материальная точка за любые
Слайд 26Графическое представление
перемещения, скорости и ускорения
при равномерном прямолинейном движении
перемещение
скорость
ускорение
S=S0+ Vx·t
V=Const
a=0
Графическое представление
перемещения, скорости и ускорения
при равномерном прямолинейном движении
перемещение
скорость
ускорение
S=S0+ Vx·t
V=Const
a=0
Слайд 27Графики движения тел, перемещающихся с различной скоростью
0
1
2
3
t, с
100
200
300
400
500
600
x, м
Графики движения тел, перемещающихся с различной скоростью
0
1
2
3
t, с
100
200
300
400
500
600
x, м
Слайд 28Криволинейное движение - движение, траектория которого представляет собой не прямые, а кривые
Криволинейное движение - движение, траектория которого представляет собой не прямые, а кривые
Слайд 29 Неравномерное движение
Движение, при котором за равные промежутки времени тело совершает неравные перемещения
Неравномерное движение
Движение, при котором за равные промежутки времени тело совершает неравные перемещения
Слайд 30скорость
По определению
тогда скорость равноускоренного движения
При записи уравнения в проекции векторов на координатную
скорость
По определению
тогда скорость равноускоренного движения
При записи уравнения в проекции векторов на координатную

Слайд 31график зависимости проекции скорости от времени.
м/с
В системе СИ-Международной системе единиц
график зависимости проекции скорости от времени.
м/с
В системе СИ-Международной системе единиц
Слайд 32УСКОРЕНИЕ
– характеристика неравномерного движения, показывает на сколько изменилась скорость за 1с.
УСКОРЕНИЕ
– характеристика неравномерного движения, показывает на сколько изменилась скорость за 1с.
Слайд 33 график зависимости проекции ускорения от времени.
В системе СИ-Международной системе единиц ускорение
график зависимости проекции ускорения от времени.
В системе СИ-Международной системе единиц ускорение
Слайд 34перемещение
Второй вариант формулы нахождения перемещения:
(1)
Подставим это выражение в формулу (1).
откуда
перемещение
Второй вариант формулы нахождения перемещения:
(1)
Подставим это выражение в формулу (1).
откуда

Слайд 35график зависимости проекции перемещения от времени
график зависимости проекции перемещения от времени
Слайд 36координата
график зависимости координаты от времени.
в любой момент времени для тела, движущегося равноускоренно
Проекция
координата
график зависимости координаты от времени.
в любой момент времени для тела, движущегося равноускоренно
Проекция
Слайд 39При движении тела по криволинейной траектории его скорость изменяется по модулю и
При движении тела по криволинейной траектории его скорость изменяется по модулю и
Слайд 40Движение по дугам окружностей
Криволинейное движение можно представить как движение по дугам окружностей
Движение по дугам окружностей
Криволинейное движение можно представить как движение по дугам окружностей
Слайд 41Направление центростремительного ускорения и скорости
Центростремительное ускорение в любой момент времени перпендикулярно скорости
Направление центростремительного ускорения и скорости
Центростремительное ускорение в любой момент времени перпендикулярно скорости
Слайд 42Если скорость тела и действующая на тело сила направлены вдоль одной прямой,
Если скорость тела и действующая на тело сила направлены вдоль одной прямой,
Слайд 43Движение тела по окружности с постоянной по модулю скоростью
Движение тела по окружности с постоянной по модулю скоростью
Слайд 44Равномерное движение по окружности – это движение с ускорением, хотя по модулю
Равномерное движение по окружности – это движение с ускорением, хотя по модулю
Слайд 45Чему равен модуль центростремительного ускорения?
Треугольник из векторов и равнобедренный, т.к.
Треугольник ОАВ
Чему равен модуль центростремительного ускорения?
Треугольник из векторов и равнобедренный, т.к.
Треугольник ОАВ
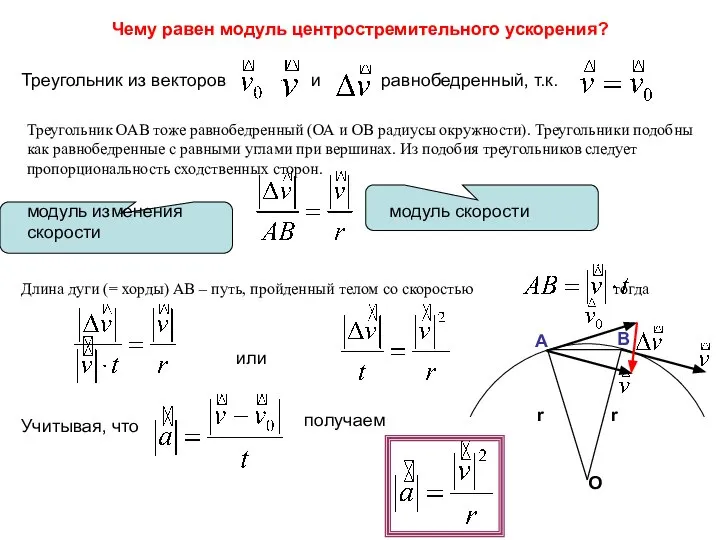
Слайд 46отношение длины дуги к радиусу окружности (ΔS/R=Δφ) равно центральному углу, выраженному в
отношение длины дуги к радиусу окружности (ΔS/R=Δφ) равно центральному углу, выраженному в
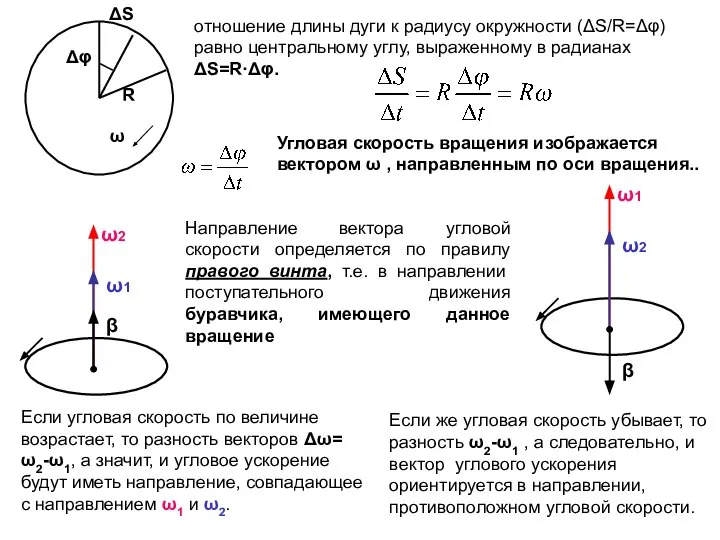
Слайд 47Угловое ускорение тоже векторная величина. Если угловая скорость по величине возрастает, то
Угловое ускорение тоже векторная величина. Если угловая скорость по величине возрастает, то
Слайд 48Связь между угловыми и линейными величинами
Связь между угловыми и линейными величинами даётся
Связь между угловыми и линейными величинами
Связь между угловыми и линейными величинами даётся
Слайд 49Период обращения
Движение тела по окружности часто характеризуют не скоростью , а промежутком
Период обращения
Движение тела по окружности часто характеризуют не скоростью , а промежутком
Слайд 50Частота обращения
Движение точки по окружности можно характеризовать числом оборотов по окружности в
Частота обращения
Движение точки по окружности можно характеризовать числом оборотов по окружности в
Слайд 51В зависимости от тангенциальных и нормальных составляющих ускорения виды движений делятся на
В зависимости от тангенциальных и нормальных составляющих ускорения виды движений делятся на
 рух по колу
рух по колу Место доказательств в научном познании
Место доказательств в научном познании Полупроводники
Полупроводники Устранение несоответствия по контакту жгута проводов двигателя о кромку площадки АКБ на а/м LADA XRAY с двигателями ВАЗ
Устранение несоответствия по контакту жгута проводов двигателя о кромку площадки АКБ на а/м LADA XRAY с двигателями ВАЗ Путешествие по океану Знаний
Путешествие по океану Знаний Электричество и магнетизм. Курс лекций
Электричество и магнетизм. Курс лекций Методы, основанные на индуцированном переходе из одной фазы в другую через разделяющую их третью фазу. (Лекция 7)
Методы, основанные на индуцированном переходе из одной фазы в другую через разделяющую их третью фазу. (Лекция 7) ИГЭС2 семестр Колебания лекция 1
ИГЭС2 семестр Колебания лекция 1 Механические колебания и волны. Решение задач. 11 класс
Механические колебания и волны. Решение задач. 11 класс Измерение физических величин
Измерение физических величин Реактивное движение. Ракеты
Реактивное движение. Ракеты Решение задач по теме Закон всемирного тяготения
Решение задач по теме Закон всемирного тяготения Невидимая сила
Невидимая сила Резисторы и Реостаты. Занятие 7
Резисторы и Реостаты. Занятие 7 Обработка деталей на оборудовании с ЧПУ
Обработка деталей на оборудовании с ЧПУ Открытия Ломоносова в области физики
Открытия Ломоносова в области физики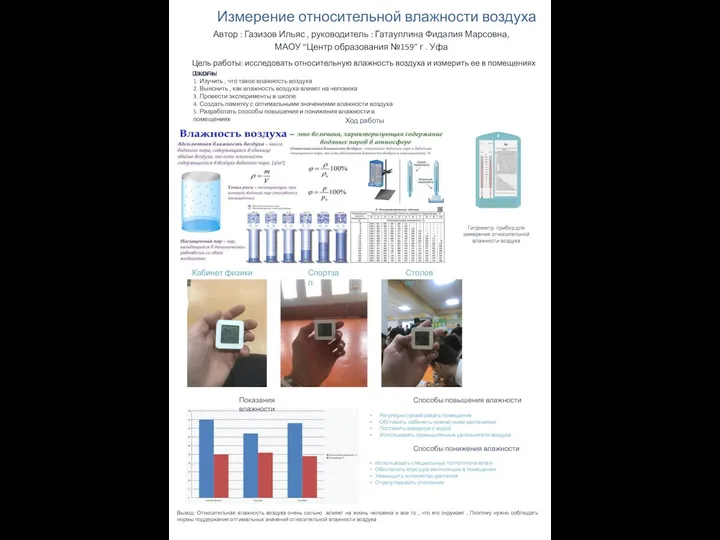 Измерение относительной влажности воздуха
Измерение относительной влажности воздуха Волновая теория Эллиотта
Волновая теория Эллиотта Строение атомов химических элементов
Строение атомов химических элементов Ультрофеолетовые волны
Ультрофеолетовые волны Основные характеристики гребных винтов
Основные характеристики гребных винтов Судың физикалық қасиеттері
Судың физикалық қасиеттері Источники света. Прямолинейное распространение света,
Источники света. Прямолинейное распространение света, Вещества в электрическом поле
Вещества в электрическом поле Урок 21+ Розв'язування задач
Урок 21+ Розв'язування задач Разработка системы управления узлом подготовки реакционной смеси с применением САР соотношения расходов
Разработка системы управления узлом подготовки реакционной смеси с применением САР соотношения расходов Вольфрам
Вольфрам Презентация на тему Сила упругости
Презентация на тему Сила упругости