- Кинематика точки

Содержание
- 2. Материальная точка – микроскопическое тело, размерами которого при описании его движения можно принебречь. Положение м.т. можно
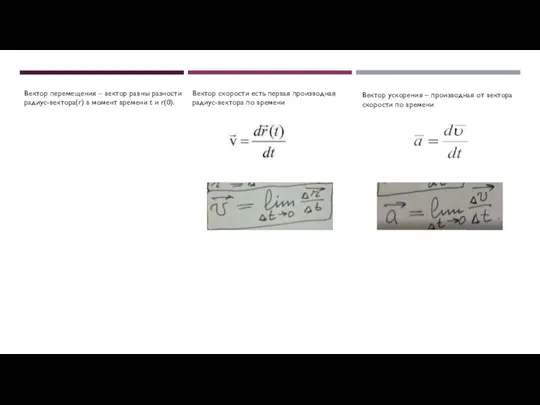
- 3. Вектор перемещения – вектор равны разности радиус-вектора(r) в момент времени t и r(0). Вектор скорости есть
- 4. Угловая скорость Угловое ускорение Тангенциальное ускорение – ускорение, вектор которого направлен по касательной к траектории движения.
- 6. Скачать презентацию
Слайд 2Материальная точка – микроскопическое тело, размерами которого при описании его движения можно
Материальная точка – микроскопическое тело, размерами которого при описании его движения можно

Слайд 3Вектор перемещения – вектор равны разности радиус-вектора(r) в момент времени t и
Вектор перемещения – вектор равны разности радиус-вектора(r) в момент времени t и
Слайд 4Угловая скорость
Угловое ускорение
Тангенциальное ускорение – ускорение, вектор которого направлен по касательной к
Угловая скорость
Угловое ускорение
Тангенциальное ускорение – ускорение, вектор которого направлен по касательной к

 Постоянный электрический ток
Постоянный электрический ток Механические колебания и волны
Механические колебания и волны Графики в задачах по кинематике
Графики в задачах по кинематике Физика в физкультуре
Физика в физкультуре Электризация тел. Два рода электрического заряда
Электризация тел. Два рода электрического заряда Л2.1. Твёрдость металлов
Л2.1. Твёрдость металлов Интегральная и дифференциальная форма законов электродинамики. Лекция 2
Интегральная и дифференциальная форма законов электродинамики. Лекция 2 Термоэлектрогенератор. Принцип работы термоэлектрогенератора
Термоэлектрогенератор. Принцип работы термоэлектрогенератора Презентация на тему Основоположники физики
Презентация на тему Основоположники физики  Сила тока. Единицы силы тока. Амперметр
Сила тока. Единицы силы тока. Амперметр Физические величины, характеризующие организм человека
Физические величины, характеризующие организм человека zamena_t_kolodok
zamena_t_kolodok Взаимодействие тел
Взаимодействие тел Обработка деталей на оборудовании с ЧПУ
Обработка деталей на оборудовании с ЧПУ Решение задач динамики машин с учетом сил упругости
Решение задач динамики машин с учетом сил упругости Плавление и кристаллизация. Удельная теплота плавления
Плавление и кристаллизация. Удельная теплота плавления Явление люминесценции
Явление люминесценции Импульс тела. Закон сохранения импульса
Импульс тела. Закон сохранения импульса Механическая работа. Единицы работы
Механическая работа. Единицы работы Польза и вред электризации
Польза и вред электризации Песочные часы
Песочные часы Случайные фракталы
Случайные фракталы Механическая работа. Мощность
Механическая работа. Мощность Электризация тел
Электризация тел Энергия колебательного движения. (Лекция 7)
Энергия колебательного движения. (Лекция 7) Раздел механики кинематика
Раздел механики кинематика Допуски, посадки и контроль шпоночных соединений деталей
Допуски, посадки и контроль шпоночных соединений деталей Электромагнитные явления
Электромагнитные явления