- Lecture1_L

Содержание
- 2. План Механика: Кинематика. 1. Механическое движение. Относительность механического движения. Материальная точка. Система отсчета. Траектория. Вектор перемещения
- 3. Кинематика Механическое движение – изменение положения тела или частей тела в пространстве относительно других тел с
- 4. Кинематика Механика делится на кинематику и динамику. В кинематике изучают движения тел, не рассматривая причин, определяющих
- 5. Кинематика Материальная точка – тело, размерами которого в данной задаче можно пренебречь. Чтобы решить задачу о
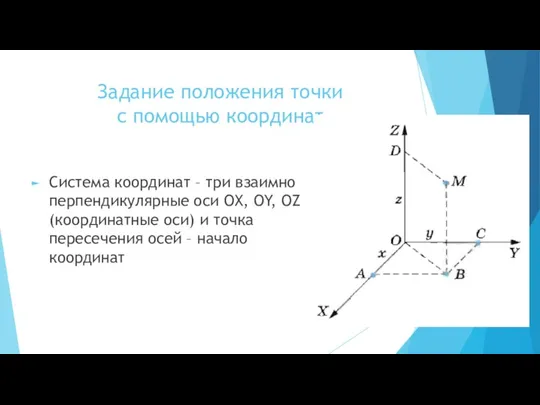
- 6. Задание положения точки с помощью координат Система координат – три взаимно перпендикулярные оси OX, OY, OZ
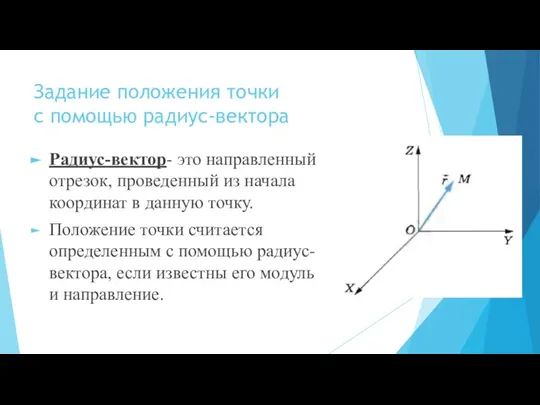
- 7. Задание положения точки с помощью радиус-вектора Радиус-вектор- это направленный отрезок, проведенный из начала координат в данную
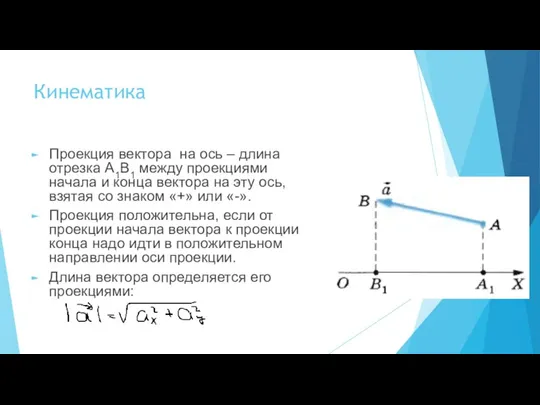
- 8. Кинематика Проекция вектора на ось – длина отрезка A1B1 между проекциями начала и конца вектора на
- 9. Кинематика Если тело можно считать материальной точкой, то для описания его движения нужно уметь рассчитать положение
- 10. Кинематика Координатный способ – т.к. материальная точка движется, то ее координаты изменяются с течением времени: x
- 11. Кинематика Линия по которой движется точка в пространстве называется траекторией. Если траекторией является прямая линия –
- 12. Кинематика Система отсчета – тело отсчета, система координат, связанная с ним и часы. Вектор перемещения (перемещение)
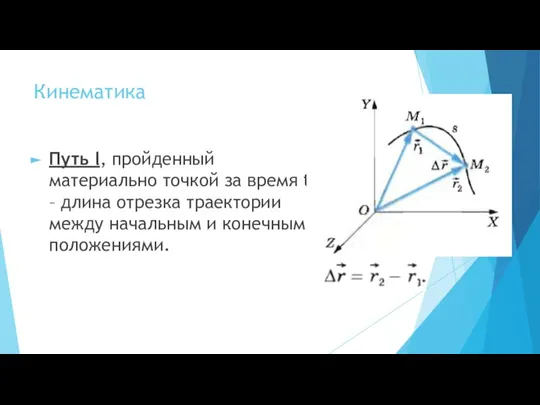
- 13. Кинематика Путь l, пройденный материально точкой за время t – длина отрезка траектории между начальным и
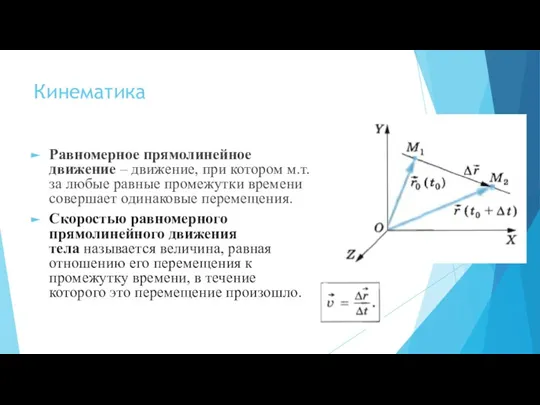
- 14. Кинематика Равномерное прямолинейное движение – движение, при котором м.т. за любые равные промежутки времени совершает одинаковые
- 15. Кинематика Это уравнение равномерного прямолинейного движения м.т., записанное в векторной форме. Это уравнение равномерного прямолинейного движения
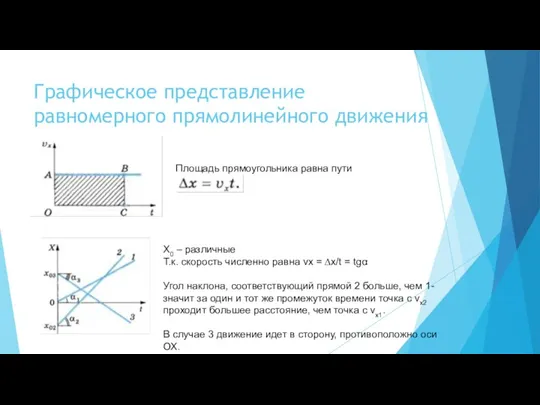
- 16. Графическое представление равномерного прямолинейного движения Площадь прямоугольника равна пути X0 – различные Т.к. скорость численно равна
- 17. Неравномерное движение Неравномерное движение может быть как прямолинейным, так и криволинейным. Чтобы описать неравномерное движение точки,
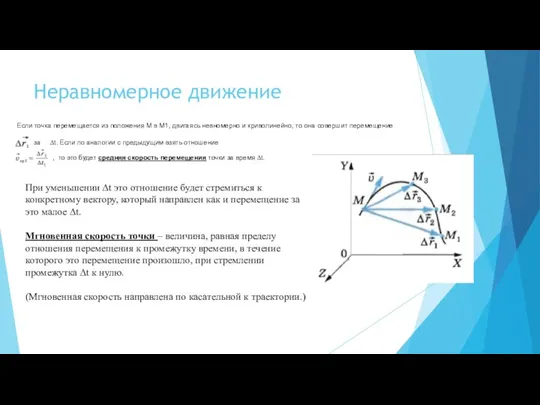
- 18. Неравномерное движение Если точка перемещается из положения М в М1, двигаясь невномерно и криволинейно, то она
- 19. Неравномерное движение Средняя путевая скорость – отношение пути к промежутку времени, за которое этот путь пройден.
- 20. Кинематика Пусть река течет относительно берега со скоростью v. По реке плывет моторная лодка со скоростью
- 21. Кинематика Закон сложения скоростей: если тело движется относительно некоторой системы отсчета К1 со скоростью v1 и
- 22. Основная литература Физика: Механика. 10 кл.: Учебник для углубленного изучения физики /Под ред. Г.Я.Мякишева. - М.:
- 24. Скачать презентацию
Слайд 2План
Механика: Кинематика.
1. Механическое движение. Относительность механического движения. Материальная точка. Система отсчета. Траектория.
План
Механика: Кинематика.
1. Механическое движение. Относительность механического движения. Материальная точка. Система отсчета. Траектория.
Слайд 3Кинематика
Механическое движение – изменение положения тела или частей тела в пространстве относительно
Кинематика
Механическое движение – изменение положения тела или частей тела в пространстве относительно

Слайд 4Кинематика
Механика делится на кинематику и динамику.
В кинематике изучают движения тел, не рассматривая
Кинематика
Механика делится на кинематику и динамику.
В кинематике изучают движения тел, не рассматривая
Слайд 5Кинематика
Материальная точка – тело, размерами которого в данной задаче можно пренебречь.
Чтобы решить
Кинематика
Материальная точка – тело, размерами которого в данной задаче можно пренебречь.
Чтобы решить
Слайд 6Задание положения точки
с помощью координат
Система координат – три взаимно перпендикулярные оси
Задание положения точки
с помощью координат
Система координат – три взаимно перпендикулярные оси
Слайд 7Задание положения точки
с помощью радиус-вектора
Радиус-вектор- это направленный отрезок, проведенный из начала
Задание положения точки
с помощью радиус-вектора
Радиус-вектор- это направленный отрезок, проведенный из начала
Слайд 8Кинематика
Проекция вектора на ось – длина отрезка A1B1 между проекциями начала и
Кинематика
Проекция вектора на ось – длина отрезка A1B1 между проекциями начала и
Слайд 9Кинематика
Если тело можно считать материальной точкой, то для описания его движения нужно
Кинематика
Если тело можно считать материальной точкой, то для описания его движения нужно
Слайд 10Кинематика
Координатный способ – т.к. материальная точка движется, то ее координаты изменяются с
Кинематика
Координатный способ – т.к. материальная точка движется, то ее координаты изменяются с
Слайд 11Кинематика
Линия по которой движется точка в пространстве называется траекторией.
Если траекторией является прямая
Кинематика
Линия по которой движется точка в пространстве называется траекторией.
Если траекторией является прямая
Слайд 12Кинематика
Система отсчета – тело отсчета, система координат, связанная с ним и часы.
Вектор
Кинематика
Система отсчета – тело отсчета, система координат, связанная с ним и часы.
Вектор
Слайд 13Кинематика
Путь l, пройденный материально точкой за время t – длина отрезка траектории
Кинематика
Путь l, пройденный материально точкой за время t – длина отрезка траектории
Слайд 14Кинематика
Равномерное прямолинейное движение – движение, при котором м.т. за любые равные промежутки
Кинематика
Равномерное прямолинейное движение – движение, при котором м.т. за любые равные промежутки
Слайд 15Кинематика
Это уравнение равномерного прямолинейного движения м.т.,
записанное в векторной форме.
Это уравнение равномерного
Кинематика
Это уравнение равномерного прямолинейного движения м.т.,
записанное в векторной форме.
Это уравнение равномерного

Слайд 16Графическое представление равномерного прямолинейного движения
Площадь прямоугольника равна пути
X0 – различные
Т.к. скорость численно
Графическое представление равномерного прямолинейного движения
Площадь прямоугольника равна пути
X0 – различные
Т.к. скорость численно
Слайд 17Неравномерное движение
Неравномерное движение может быть как прямолинейным, так и криволинейным. Чтобы описать неравномерное
Неравномерное движение
Неравномерное движение может быть как прямолинейным, так и криволинейным. Чтобы описать неравномерное
Слайд 18Неравномерное движение
Если точка перемещается из положения М в М1, двигаясь невномерно и
Неравномерное движение
Если точка перемещается из положения М в М1, двигаясь невномерно и
Слайд 19Неравномерное движение
Средняя путевая скорость – отношение пути к промежутку времени, за которое
Неравномерное движение
Средняя путевая скорость – отношение пути к промежутку времени, за которое
Слайд 20Кинематика
Пусть река течет относительно берега со скоростью v.
По реке плывет моторная
Кинематика
Пусть река течет относительно берега со скоростью v.
По реке плывет моторная

Слайд 21Кинематика
Закон сложения скоростей: если тело движется относительно некоторой системы отсчета К1 со
Кинематика
Закон сложения скоростей: если тело движется относительно некоторой системы отсчета К1 со
Слайд 22Основная литература
Физика: Механика. 10 кл.: Учебник для углубленного изучения физики /Под ред.
Основная литература
Физика: Механика. 10 кл.: Учебник для углубленного изучения физики /Под ред.
 Создание магнитной жидкости
Создание магнитной жидкости Термодинамика. Решение задач
Термодинамика. Решение задач Свободное падение тел
Свободное падение тел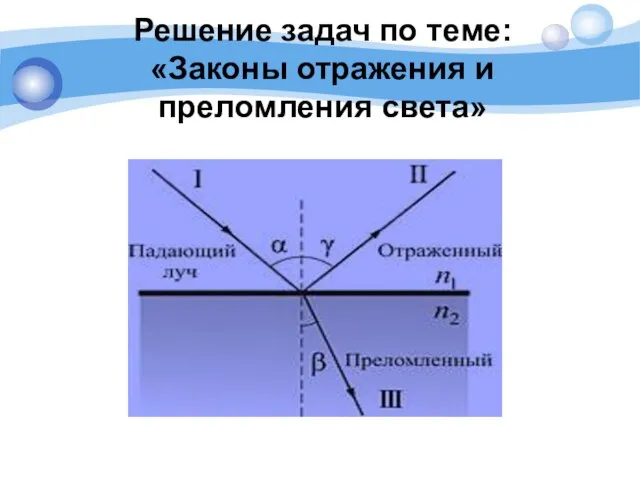 Решение задач по теме: Законы отражения и преломления света
Решение задач по теме: Законы отражения и преломления света Прогнозирование изменения прочностных свойств резины при ее термическом старении
Прогнозирование изменения прочностных свойств резины при ее термическом старении Радиоволны. Сферы применения
Радиоволны. Сферы применения Ответы на вопросы
Ответы на вопросы Изучение звуковых колебаний
Изучение звуковых колебаний Применение закона сохранения импульса
Применение закона сохранения импульса Механические волны
Механические волны teploperedacha-_8_kl
teploperedacha-_8_kl Основные понятия механики
Основные понятия механики Типология транспорта для уборки улиц и общественнх учреждений
Типология транспорта для уборки улиц и общественнх учреждений Нормальные поля
Нормальные поля Презентация на тему Движение по окружности
Презентация на тему Движение по окружности  Потери электроэнергии в электрических сетях
Потери электроэнергии в электрических сетях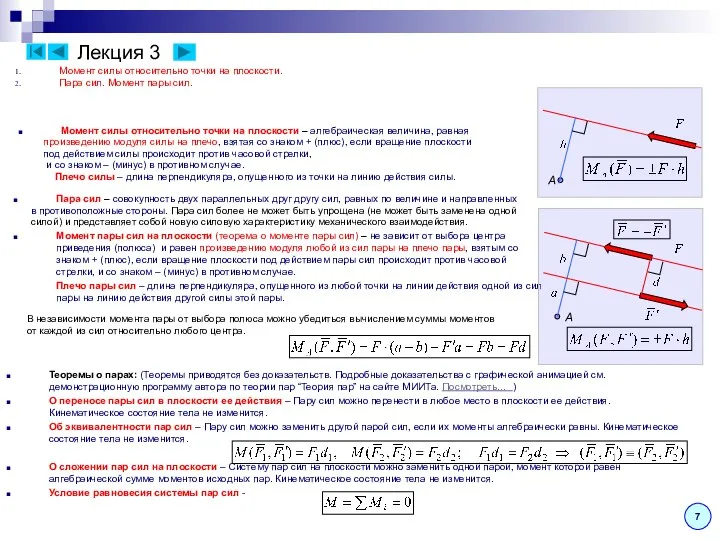 Момент силы относительно точки и оси. Теория пар сил. Приведение произвольной системы сил к заданному центру. Теорема Вариньона
Момент силы относительно точки и оси. Теория пар сил. Приведение произвольной системы сил к заданному центру. Теорема Вариньона Рух тіла під дією кількох сил
Рух тіла під дією кількох сил موج طرح
موج طرح Гармонические колебания. Затухающие и вынужденные колебания. Резонанс
Гармонические колебания. Затухающие и вынужденные колебания. Резонанс Методическая разработка по применению первого закона термодинамики к решению графических задач
Методическая разработка по применению первого закона термодинамики к решению графических задач Энергия топлива. Удельная теплота сгорания топлива
Энергия топлива. Удельная теплота сгорания топлива Карно Николо Леонар Сади 1796-1832
Карно Николо Леонар Сади 1796-1832 Технологический процесс монтажа устройства для формовки протектора
Технологический процесс монтажа устройства для формовки протектора Презентация на тему Источники электрического тока
Презентация на тему Источники электрического тока  Практикум по решению задач на движение тела под действием нескольких сил
Практикум по решению задач на движение тела под действием нескольких сил Механика и элементы специальной теории относительности
Механика и элементы специальной теории относительности Сборка регулировка и испытание КШМ и ГРМ двигателей
Сборка регулировка и испытание КШМ и ГРМ двигателей