Метод составления уравнений движения гибкого кольца при неголономных ограничениях для создания волнового гироскопа
- Метод составления уравнений движения гибкого кольца при неголономных ограничениях для создания волнового гироскопа

Содержание
- 2. Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический формализм, созданный трудами Л.
- 3. Только в 1894 г. в книге «Принципы механики, изложенные в новой связи» (через 106 лет после
- 4. . К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей динамики механических систем-находит широкое
- 5. Условия голономные и неголономные. Условия (они же ограничения), накладываемые на движение механической системы разделяют как потенциальные:
- 6. Условия голономные и неголономные. Задача учета кинематических связей в нелинейном виде не разработана, в линейном виде
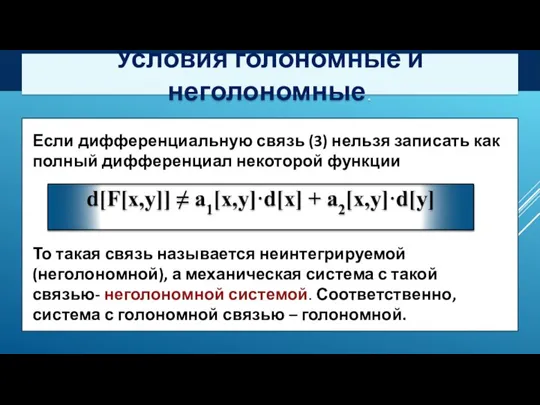
- 7. Условия голономные и неголономные. Если дифференциальную связь (3) нельзя записать как полный дифференциал некоторой функции То
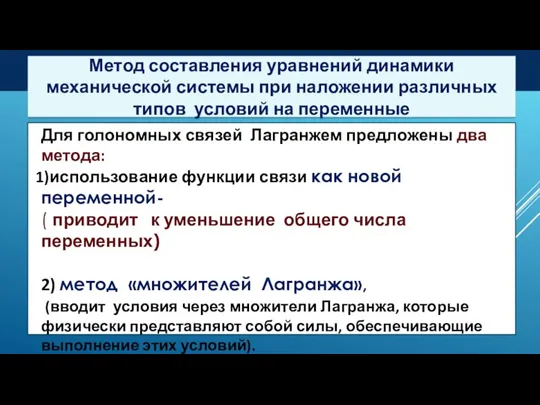
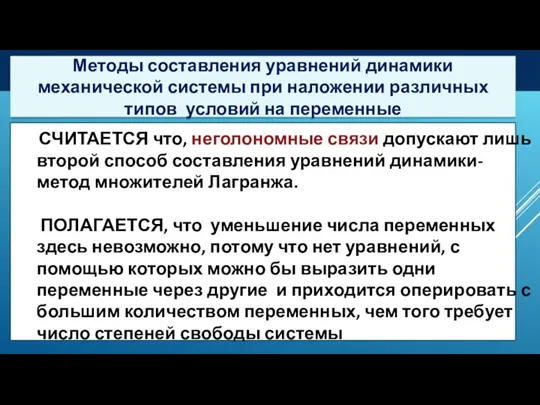
- 8. Метод составления уравнений динамики механической системы при наложении различных типов условий на переменные Для голономных связей
- 9. Методы составления уравнений динамики механической системы при наложении различных типов условий на переменные (2) а1 [
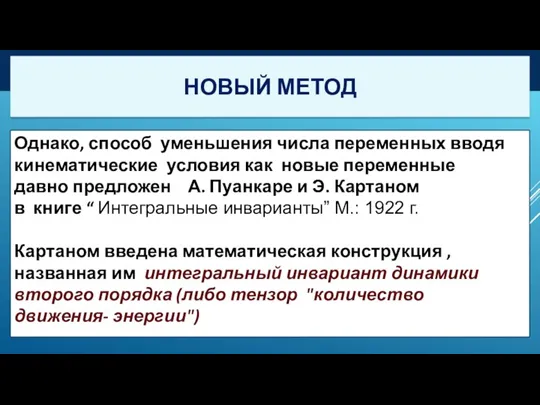
- 10. Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные давно предложен А. Пуанкаре и
- 11. Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона. В современных обозначениях: dΩ =d[x1]⋀d[x]-d[H]⋀d[t]
- 12. НОВЫЙ МЕТОД Поскольку из этого дифференциального инварианта следует система уравнений движения - любой механической системы, а
- 13. В случае использования интегрального инварианта механики по Картану, введение ограничений на переменные механической системы (как голономные,
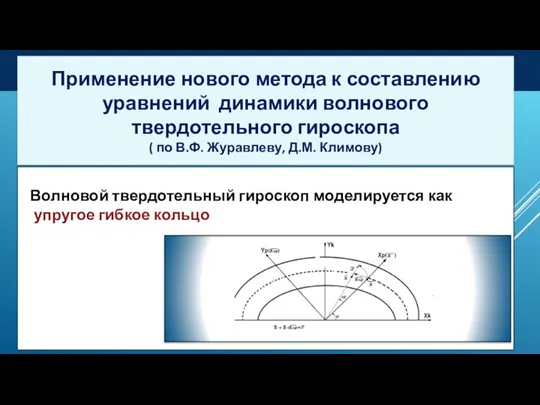
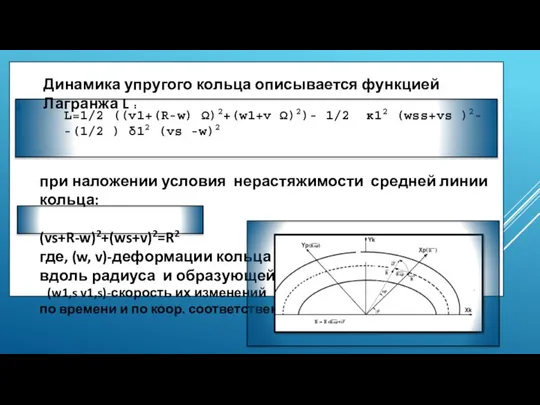
- 14. Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа ( по В.Ф. Журавлеву, Д.М. Климову)
- 15. L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2- -(1/2 ) δ12 (vs -w)2 при наложении условия
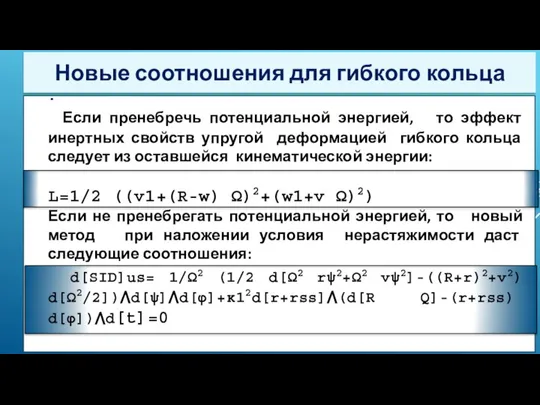
- 16. . Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией гибкого кольца следует из оставшейся
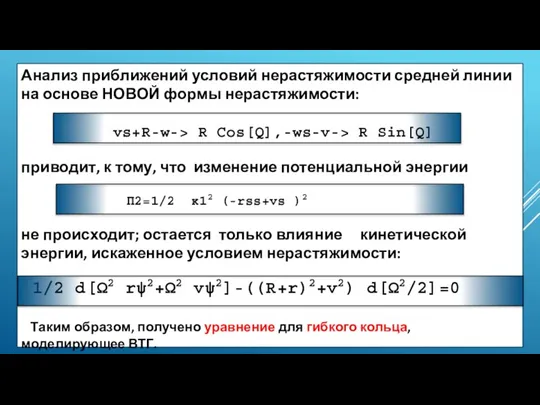
- 17. Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости: vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q]
- 18. Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и в случае когда потенциальной
- 19. Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2]=0 или ((R+r)2+v2) d[Ω2/2]=1/2
- 20. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Картан Э.Д. Интегральные инварианты М.: 1922 г. 2. Суслов Г.К. Теоретическая механика,
- 22. Скачать презентацию
Слайд 2Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Слайд 3Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Слайд 4.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
Слайд 5Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Слайд 6Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не разработана,
Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не разработана,

Слайд 7Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Слайд 8Метод составления уравнений динамики механической системы при наложении различных типов условий на
Метод составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 9Методы составления уравнений динамики механической системы при наложении различных типов условий на
Методы составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 10
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Слайд 11
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Слайд 12НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
Слайд 13
В случае использования интегрального инварианта механики по Картану, введение ограничений на
В случае использования интегрального инварианта механики по Картану, введение ограничений на
Слайд 14Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Слайд 15
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
Слайд 16
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
Слайд 17
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Слайд 18Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Слайд 19Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
![Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1157069/slide-18.jpg)
Слайд 20СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
 Открытие протона и нейрона
Открытие протона и нейрона Электрическое поле. Делимость электрического заряда. Электрон. Строение атомов
Электрическое поле. Делимость электрического заряда. Электрон. Строение атомов Технология. Ядерная энергия
Технология. Ядерная энергия Второе начало термодинамики. Принцип действия тепловой машины и ее КПД. Лекция 6
Второе начало термодинамики. Принцип действия тепловой машины и ее КПД. Лекция 6 Решение качественных и вычислительных задач: практическая работа. 10 класс
Решение качественных и вычислительных задач: практическая работа. 10 класс Конструктивные изменения, внесенные в устройства техники ОАО Гомсельмаш
Конструктивные изменения, внесенные в устройства техники ОАО Гомсельмаш Машины переменного тока. Переменный ток. Синхронные генераторы
Машины переменного тока. Переменный ток. Синхронные генераторы Течение и свойства жидкости
Течение и свойства жидкости Типы врезок
Типы врезок Возможности расчетов на сейсмические воздействия в программном комплексе ЛИРА 10.8
Возможности расчетов на сейсмические воздействия в программном комплексе ЛИРА 10.8 Фазовые диаграммы состояния вещества
Фазовые диаграммы состояния вещества Рассеивающие линзы
Рассеивающие линзы Передняя и задняя подвески ГАЗ-3309
Передняя и задняя подвески ГАЗ-3309 Хот-роды
Хот-роды Закон сохранения импульса
Закон сохранения импульса Физические велечины. Задания
Физические велечины. Задания Работа с lego mindstorms ev3. Задание № 1: движение вперед и назад
Работа с lego mindstorms ev3. Задание № 1: движение вперед и назад Плавание судов. Воздухоплавание
Плавание судов. Воздухоплавание Презентация по физике "Колебания маятника" -
Презентация по физике "Колебания маятника" -  Разгон
Разгон Интерференция света в тонких пленках. Лаборатория природы
Интерференция света в тонких пленках. Лаборатория природы Определение технического состояния системы питания карбюраторных и инжекторных
Определение технического состояния системы питания карбюраторных и инжекторных Досліди Фарадея. Закон електромагнітної індукції
Досліди Фарадея. Закон електромагнітної індукції Силы трения между соприкасающимися поверхностями твердых тел
Силы трения между соприкасающимися поверхностями твердых тел Атомно-абсорбционные методы. АSS
Атомно-абсорбционные методы. АSS Моя профессия - тракторист-машинист
Моя профессия - тракторист-машинист Работа силы упругости. Потенциальная энергия упруго деформированного тела
Работа силы упругости. Потенциальная энергия упруго деформированного тела Силы в природе
Силы в природе