- Построение теоретического профиля кулачка

Содержание
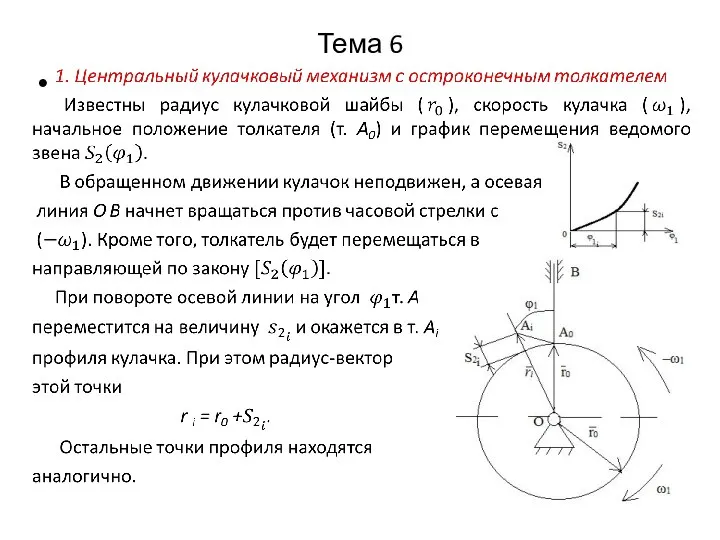
- 2. Тема 6
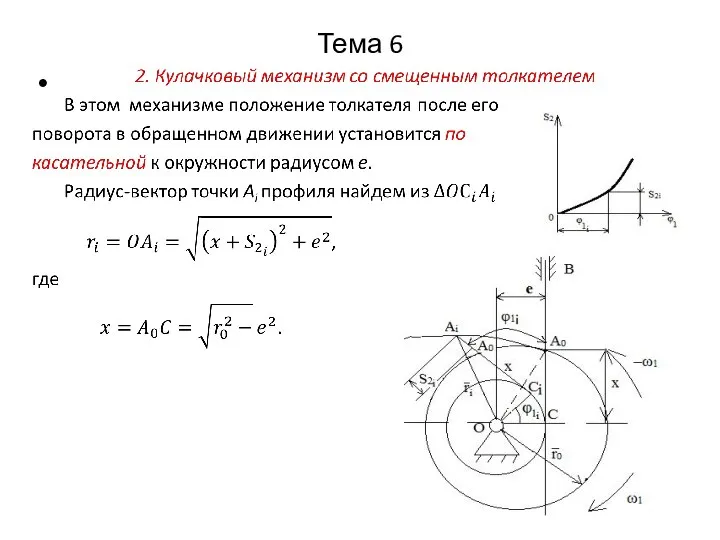
- 3. Тема 6
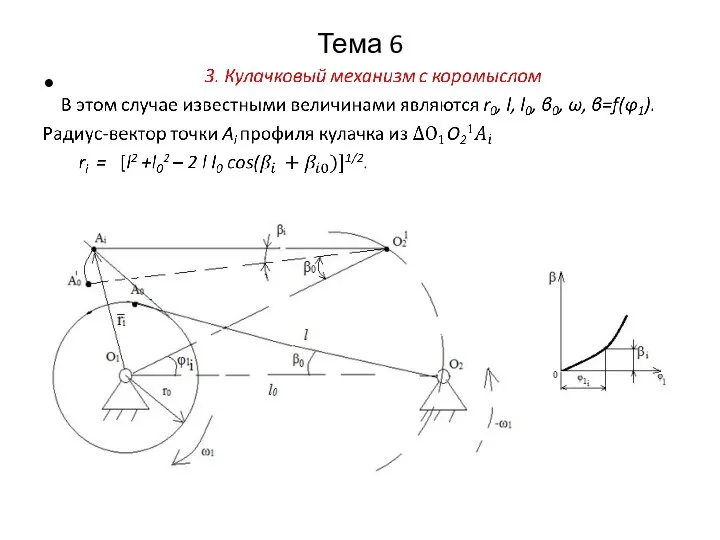
- 4. Тема 6
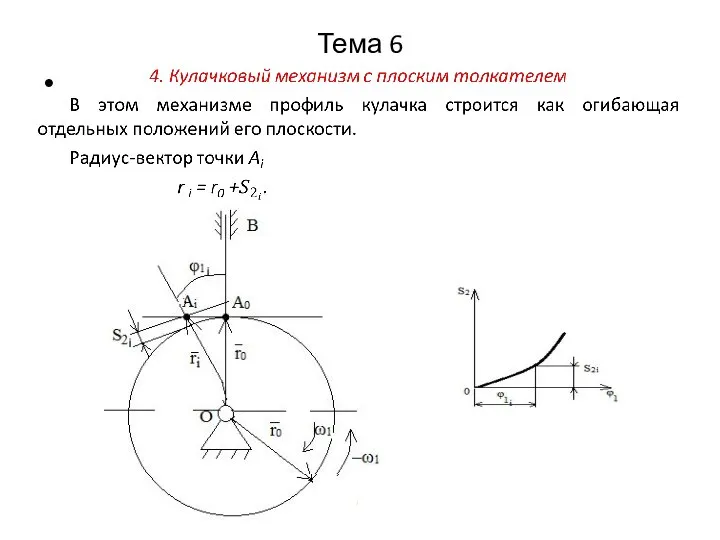
- 5. Тема 6
- 6. Тема 6 6.5.7. Порядок проектирования профиля кулачка Строится кинематическая диаграмма аналога ускорений в произвольном масштабе; 2.
- 7. Тема 6 6. Полученный в виде ломаной линии график аналогов скоростей заменяется плавной кривой; 7. Аналогичным
- 8. Тема 6 Второй пример графического интегрирования графика аналогов ускорения
- 9. Тема 6 9. Строится передаточная диаграмма – зависимость между перемещениями и аналогами скоростей толкателя за полный
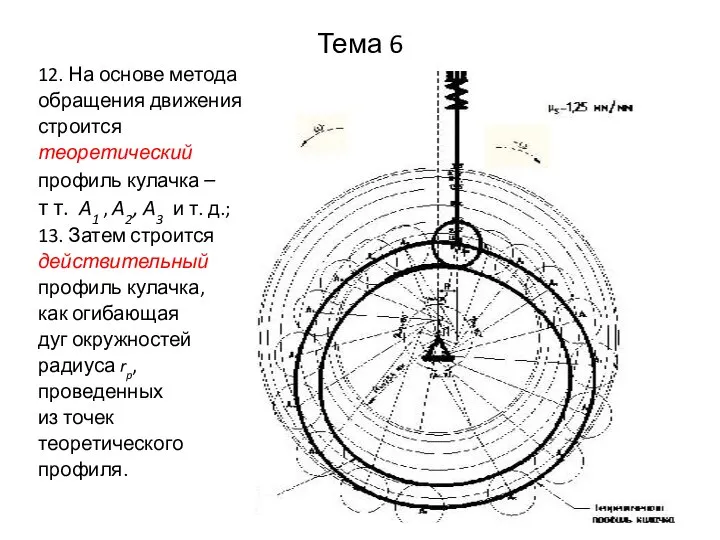
- 10. Тема 6 12. На основе метода обращения движения строится теоретический профиль кулачка – т т. A1
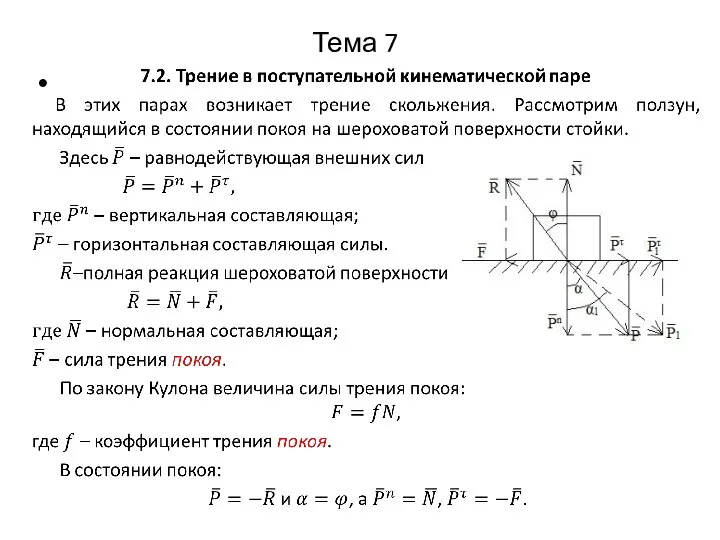
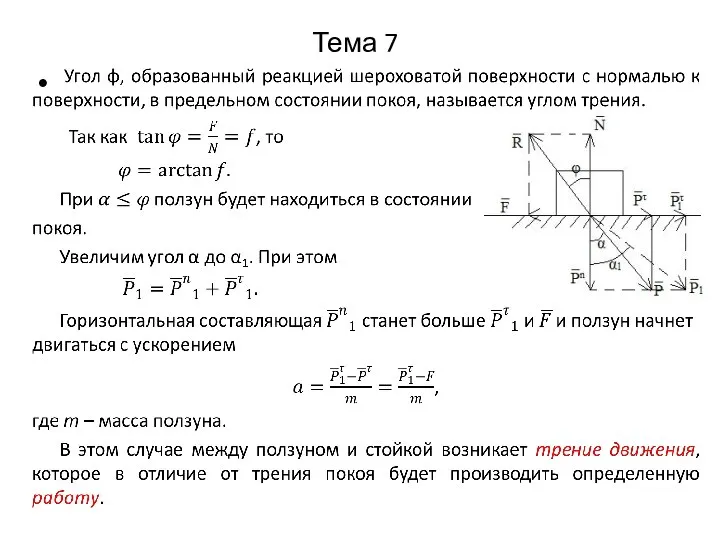
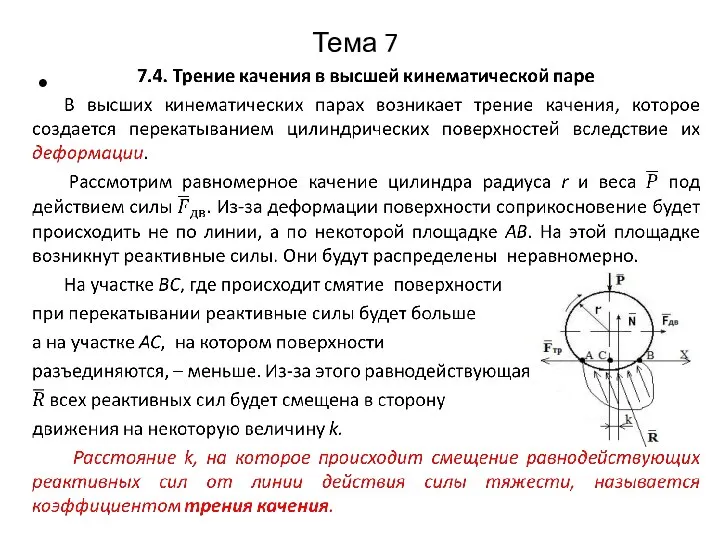
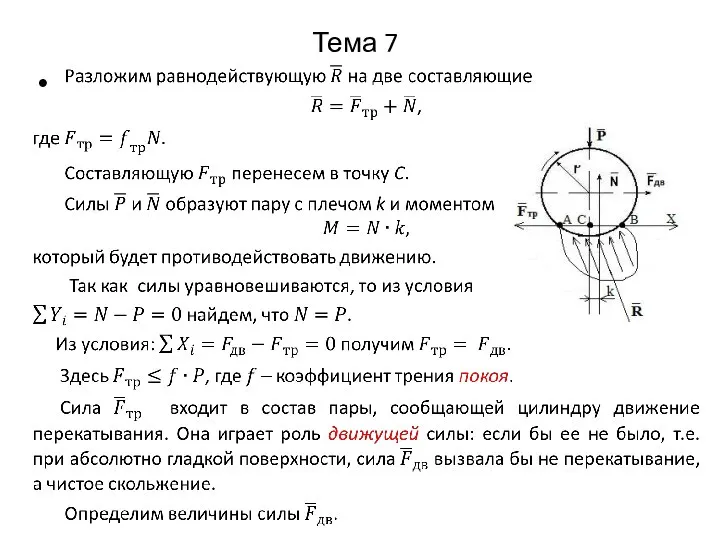
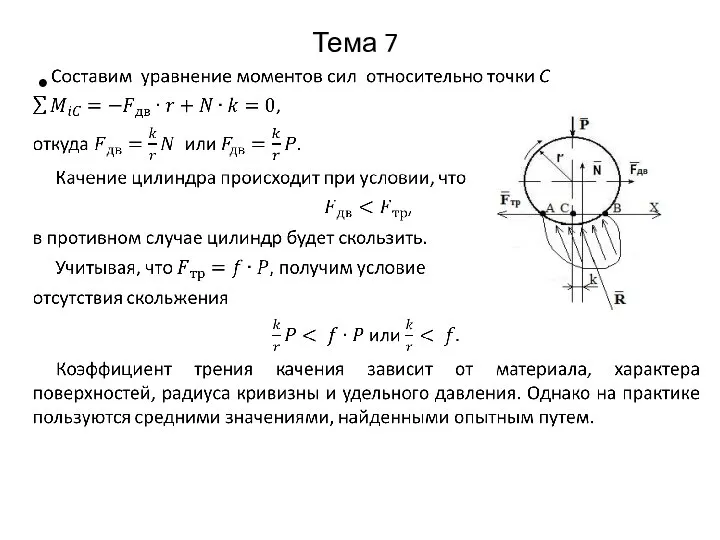
- 11. Тема 7 Тема 7. Учет сил трения при силовом анализе 7.1. Виды трения При относительном движении
- 12. Тема 7 Трение скольжения возникает при волочении тела, т.е. когда оно не вращается вокруг своей оси,
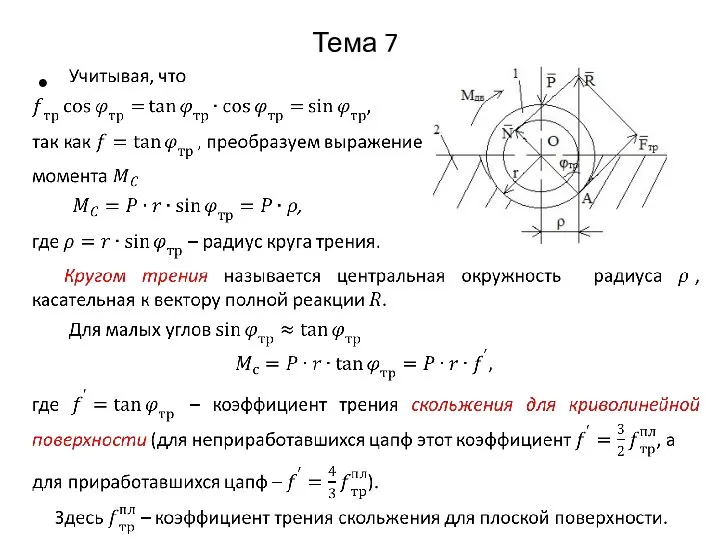
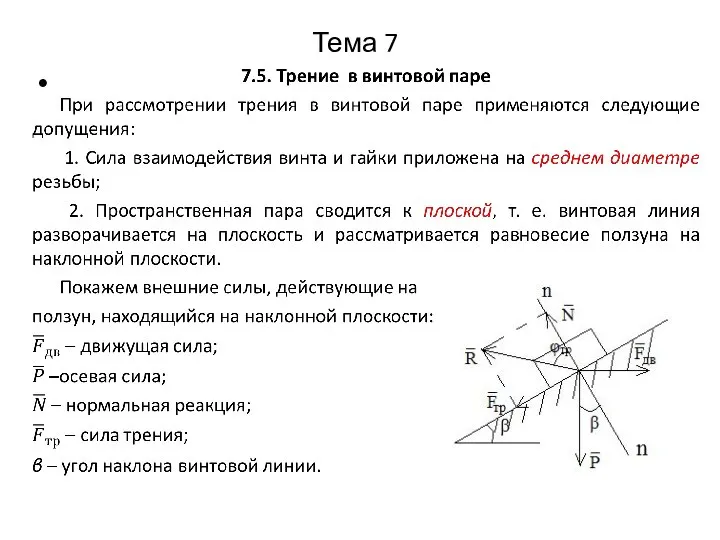
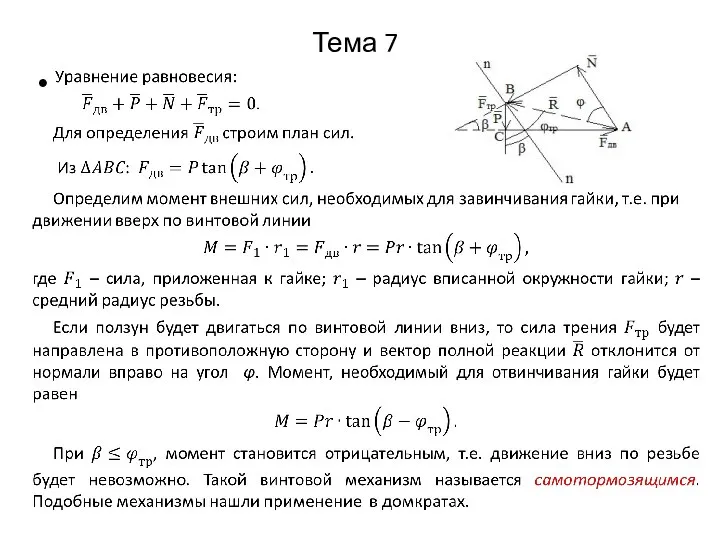
- 13. Тема 7
- 14. Тема 7
- 15. Тема 7
- 16. Тема 7
- 17. Тема 7
- 18. Тема 7
- 19. Тема 7
- 20. Тема 7
- 21. Тема 7
- 22. Тема 7
- 23. Тема 7
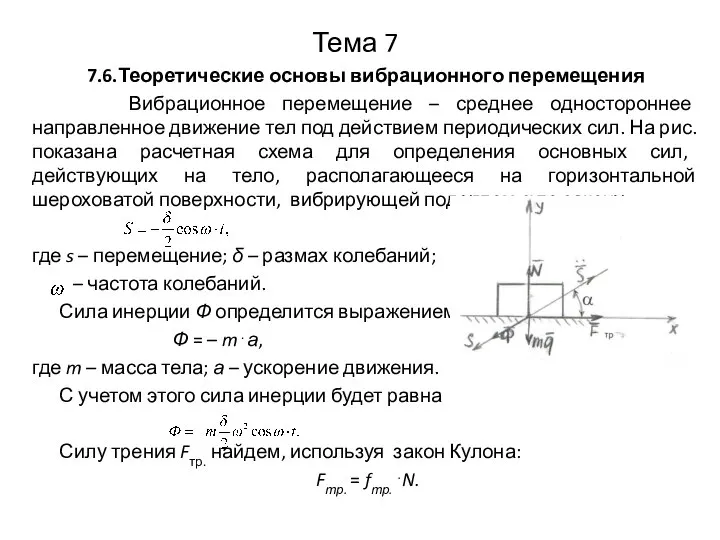
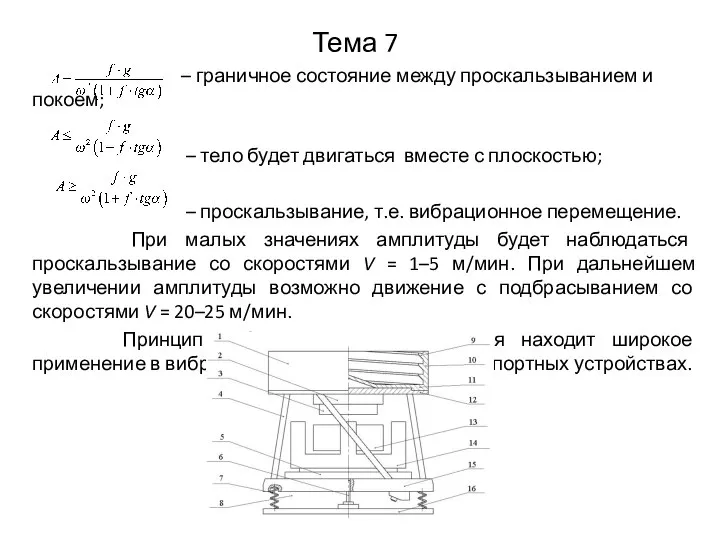
- 24. Тема 7 7.6.Теоретические основы вибрационного перемещения Вибрационное перемещение – среднее одностороннее направленное движение тел под действием
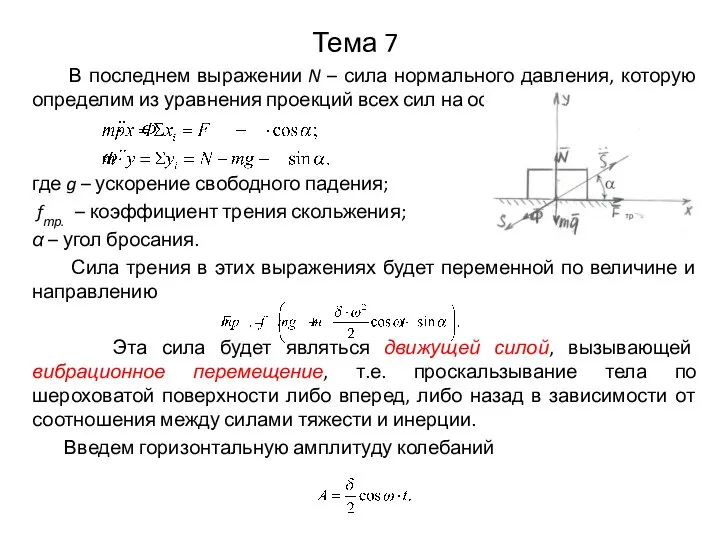
- 25. Тема 7 В последнем выражении N – сила нормального давления, которую определим из уравнения проекций всех
- 26. Тема 7 – граничное состояние между проскальзыванием и покоем; – тело будет двигаться вместе с плоскостью;
- 27. Тема 7 7.7. Механический КПД механизмов и машин Коэффициент полезного действия (КПД) − это безразмерная величина,
- 28. Тема 7 Тогда где коэффициент потерь, который показывает, какая часть работы движущих сил расходуется на преодоление
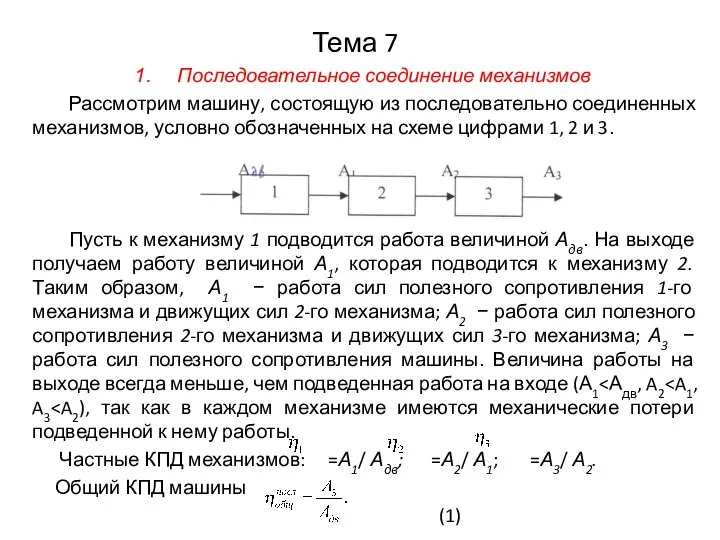
- 29. Тема 7 Последовательное соединение механизмов Рассмотрим машину, состоящую из последовательно соединенных механизмов, условно обозначенных на схеме
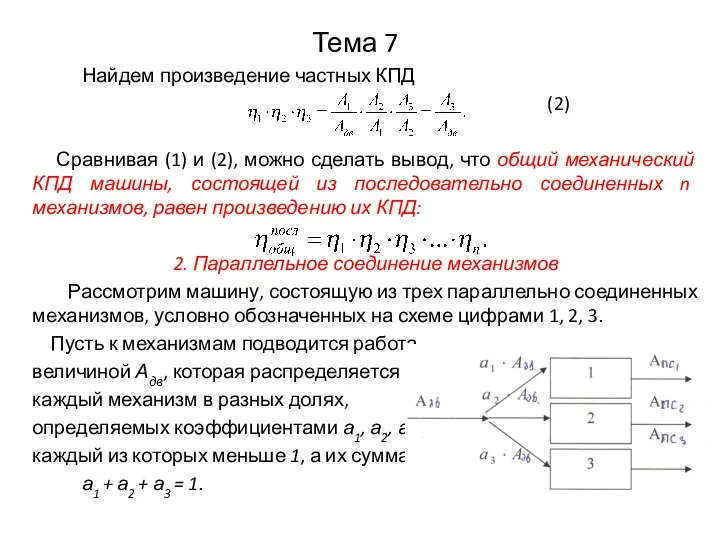
- 30. Тема 7 Найдем произведение частных КПД (2) Сравнивая (1) и (2), можно сделать вывод, что общий
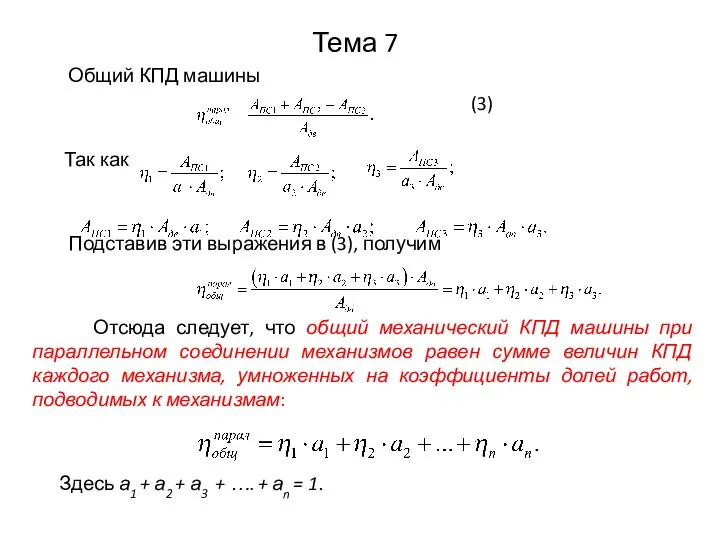
- 31. Тема 7 Общий КПД машины (3) Так как Подставив эти выражения в (3), получим Отсюда следует,
- 33. Скачать презентацию
Слайд 3Тема 6
Тема 6
Слайд 4Тема 6
Тема 6
Слайд 5Тема 6
Тема 6
Слайд 6Тема 6
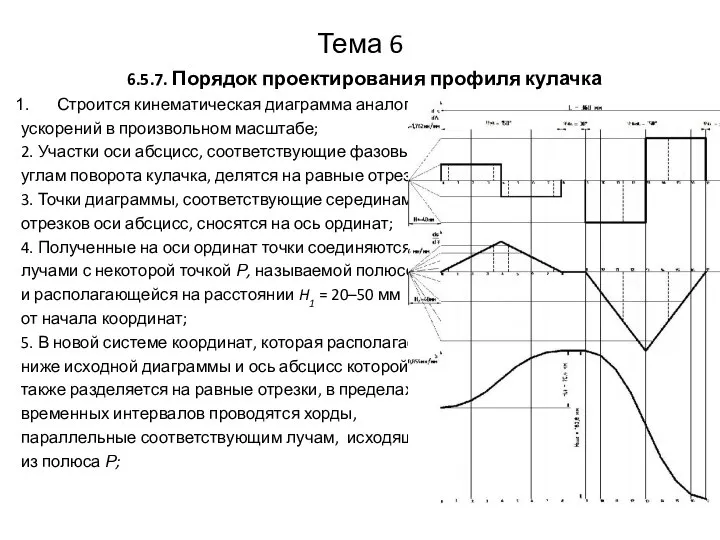
6.5.7. Порядок проектирования профиля кулачка
Строится кинематическая диаграмма аналога
ускорений в произвольном масштабе;
2.
Тема 6
6.5.7. Порядок проектирования профиля кулачка
Строится кинематическая диаграмма аналога
ускорений в произвольном масштабе;
2.
Слайд 7Тема 6
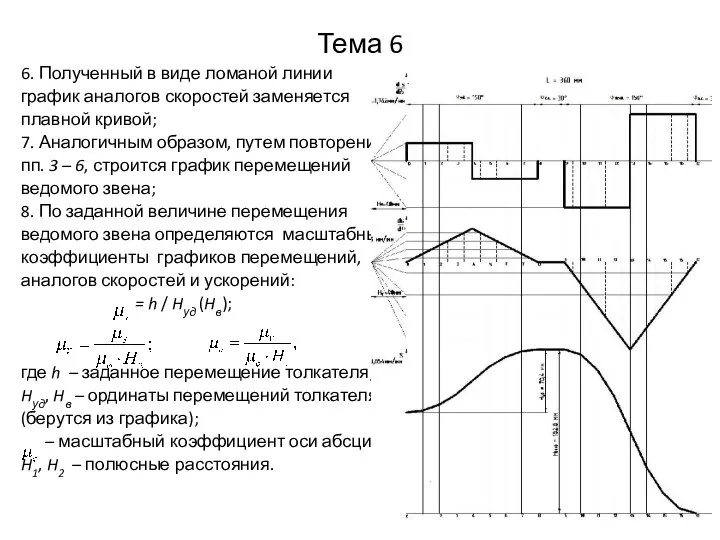
6. Полученный в виде ломаной линии
график аналогов скоростей заменяется
плавной кривой;
7.
Тема 6
6. Полученный в виде ломаной линии
график аналогов скоростей заменяется
плавной кривой;
7.
Слайд 8Тема 6
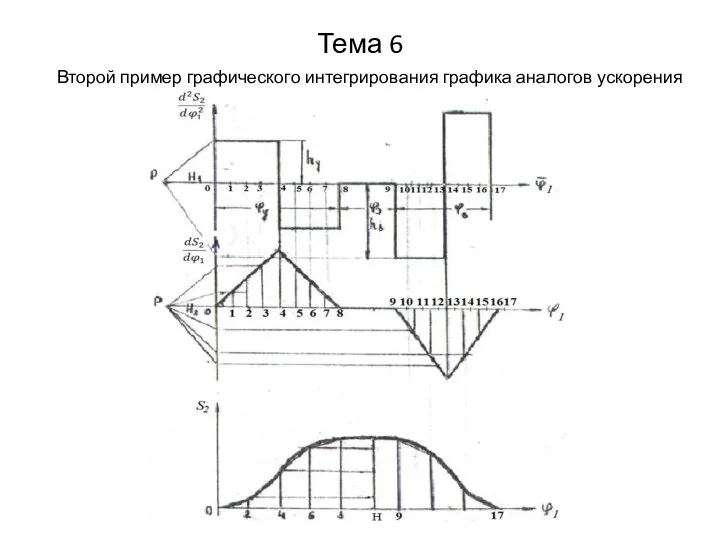
Второй пример графического интегрирования графика аналогов ускорения
Тема 6
Второй пример графического интегрирования графика аналогов ускорения
Слайд 9Тема 6
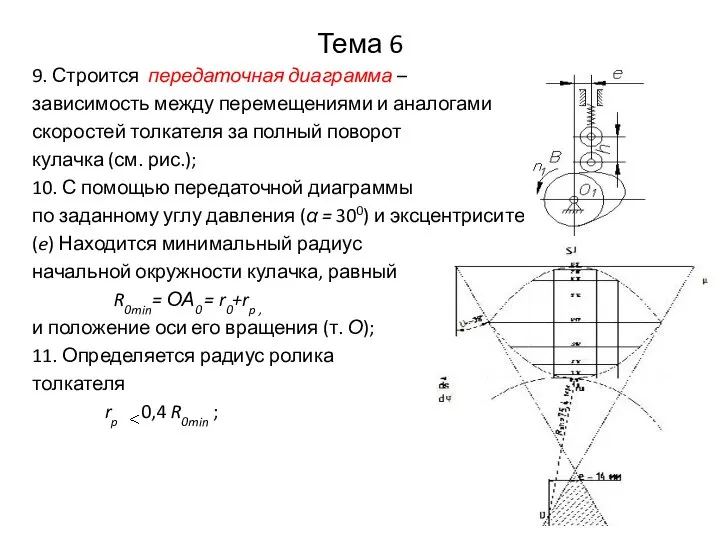
9. Строится передаточная диаграмма –
зависимость между перемещениями и аналогами
скоростей толкателя
Тема 6
9. Строится передаточная диаграмма –
зависимость между перемещениями и аналогами
скоростей толкателя
Слайд 10Тема 6
12. На основе метода
обращения движения
строится
теоретический
профиль кулачка –
т т.
Тема 6
12. На основе метода
обращения движения
строится
теоретический
профиль кулачка –
т т.
Слайд 11Тема 7
Тема 7. Учет сил трения при силовом анализе
7.1. Виды трения
При
Тема 7
Тема 7. Учет сил трения при силовом анализе
7.1. Виды трения
При
Слайд 12Тема 7
Трение скольжения возникает при волочении тела, т.е. когда оно не
Тема 7
Трение скольжения возникает при волочении тела, т.е. когда оно не
Слайд 13Тема 7
Тема 7
Слайд 14Тема 7
Тема 7
Слайд 15Тема 7
Тема 7
Слайд 16Тема 7
Тема 7
Слайд 17Тема 7
Тема 7
Слайд 18Тема 7
Тема 7
Слайд 19Тема 7
Тема 7
Слайд 20Тема 7
Тема 7
Слайд 21Тема 7
Тема 7
Слайд 22Тема 7
Тема 7
Слайд 23Тема 7
Тема 7
Слайд 24Тема 7
7.6.Теоретические основы вибрационного перемещения
Вибрационное перемещение – среднее одностороннее направленное движение
Тема 7
7.6.Теоретические основы вибрационного перемещения
Вибрационное перемещение – среднее одностороннее направленное движение
Слайд 25Тема 7
В последнем выражении N – сила нормального давления, которую определим
Тема 7
В последнем выражении N – сила нормального давления, которую определим
Слайд 26Тема 7
– граничное состояние между проскальзыванием и покоем;
– тело будет
Тема 7
– граничное состояние между проскальзыванием и покоем;
– тело будет
Слайд 27Тема 7
7.7. Механический КПД механизмов и машин
Коэффициент полезного действия (КПД) −
Тема 7
7.7. Механический КПД механизмов и машин
Коэффициент полезного действия (КПД) −
Слайд 28Тема 7
Тогда
где коэффициент потерь, который показывает, какая часть работы движущих
Тема 7
Тогда
где коэффициент потерь, который показывает, какая часть работы движущих
Слайд 29Тема 7
Последовательное соединение механизмов
Рассмотрим машину, состоящую из последовательно соединенных механизмов, условно
Тема 7
Последовательное соединение механизмов
Рассмотрим машину, состоящую из последовательно соединенных механизмов, условно
Слайд 30Тема 7
Найдем произведение частных КПД
(2)
Сравнивая (1) и (2), можно
Тема 7
Найдем произведение частных КПД
(2)
Сравнивая (1) и (2), можно
Слайд 31Тема 7
Общий КПД машины
(3)
Так как
Подставив эти выражения в (3),
Тема 7
Общий КПД машины
(3)
Так как
Подставив эти выражения в (3),
 Источники света
Источники света Семестровый контроль знаний. Детали машин и основы конструирования
Семестровый контроль знаний. Детали машин и основы конструирования Физический океан
Физический океан Мобильный телефон с точки зрения физики
Мобильный телефон с точки зрения физики Густина. Одиниці густини
Густина. Одиниці густини Температура. Тепловое равновесие. Определение температуры
Температура. Тепловое равновесие. Определение температуры Презентация на тему Движение тел по наклонной плоскости
Презентация на тему Движение тел по наклонной плоскости  Открытие нейтрона
Открытие нейтрона Звуковые волны
Звуковые волны Основы медицинской и биологической физики. Лекция 4. Часть 1
Основы медицинской и биологической физики. Лекция 4. Часть 1 Расчет однофазной цепи синусоидального тока
Расчет однофазной цепи синусоидального тока Презентация по физике "Архимедова сила" -
Презентация по физике "Архимедова сила" -  Презентация на тему Давление газа (7 класс)
Презентация на тему Давление газа (7 класс)  Сложение двух сил, направленных по одной прямой. Равнодействующая сил. 7 класс
Сложение двух сил, направленных по одной прямой. Равнодействующая сил. 7 класс Кинематика 3. Движение тела, брошенного горизонтально или под углом к горизонту
Кинематика 3. Движение тела, брошенного горизонтально или под углом к горизонту Регуляторы электрических режимов
Регуляторы электрических режимов Интерпретация спектральной классификации. (Тема 18)
Интерпретация спектральной классификации. (Тема 18) Презентация на тему Оптические приборы
Презентация на тему Оптические приборы  Сила тока
Сила тока Вес тела. Невесомость
Вес тела. Невесомость Тематика курсовых работ, предлагаемых сотрудниками кафедры и лабораторий прикладной механики и управления
Тематика курсовых работ, предлагаемых сотрудниками кафедры и лабораторий прикладной механики и управления Электрический ток
Электрический ток Элементы релятивистской механики (продолжение). Лекция № 9
Элементы релятивистской механики (продолжение). Лекция № 9 Моя профессия - тракторист-машинист
Моя профессия - тракторист-машинист Урок 20 Світловий промінь і світловий пучок
Урок 20 Світловий промінь і світловий пучок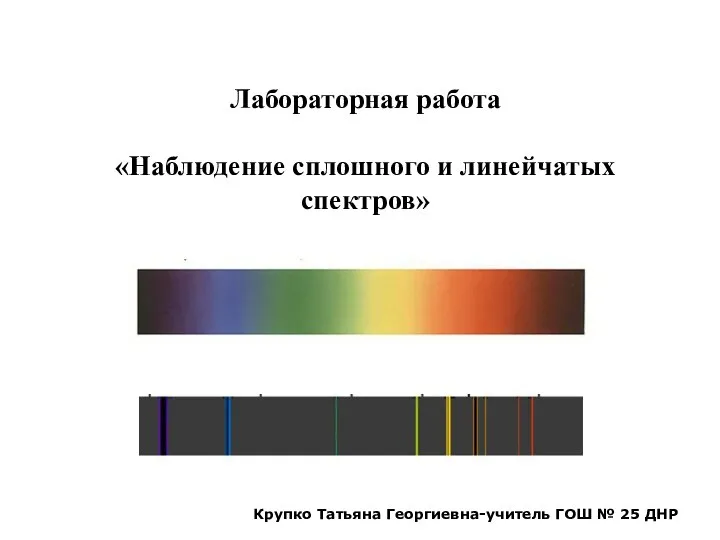 Наблюдение сплошного и линейчатых спектров
Наблюдение сплошного и линейчатых спектров X-rays
X-rays Плавание тел. Условие плавания тел
Плавание тел. Условие плавания тел