- Произвольная плоская система сил. Лекция 3

Содержание
- 2. 3.1. Приведение произвольной плоской системы сил к простейшему виду
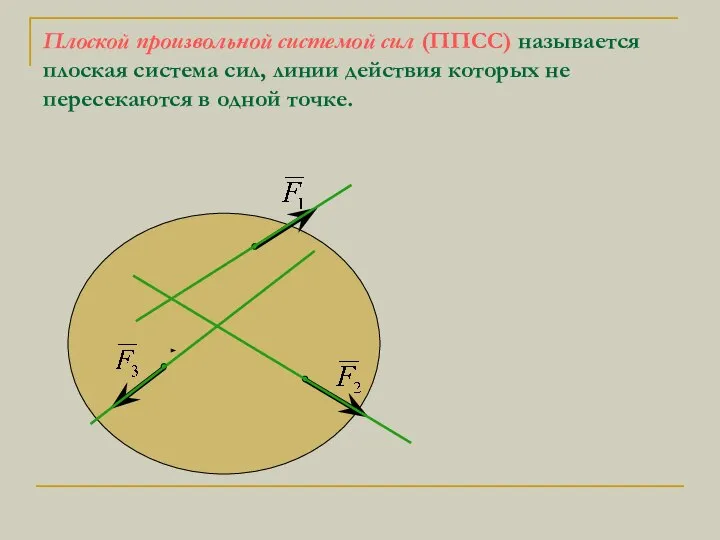
- 3. Плоской произвольной системой сил (ППСС) называется плоская система сил, линии действия которых не пересекаются в одной
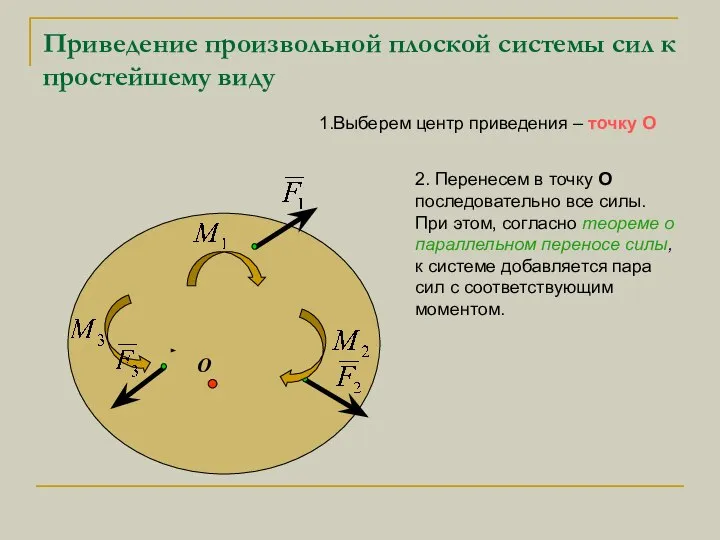
- 4. Приведение произвольной плоской системы сил к простейшему виду 1.Выберем центр приведения – точку О О 2.
- 5. Приведение произвольной плоской системы сил к простейшему виду 3. В результате приведения всех сил к точке
- 6. Приведение произвольной плоской системы сил к простейшему виду 4. Система сил, сходящихся в точке О приводится
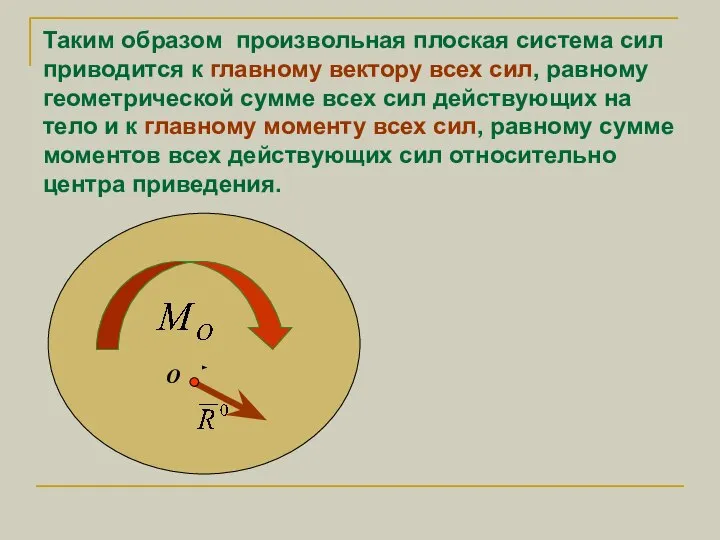
- 7. Таким образом произвольная плоская система сил приводится к главному вектору всех сил, равному геометрической сумме всех
- 8. 3.2. Условия равновесия произвольной плоской системы сил
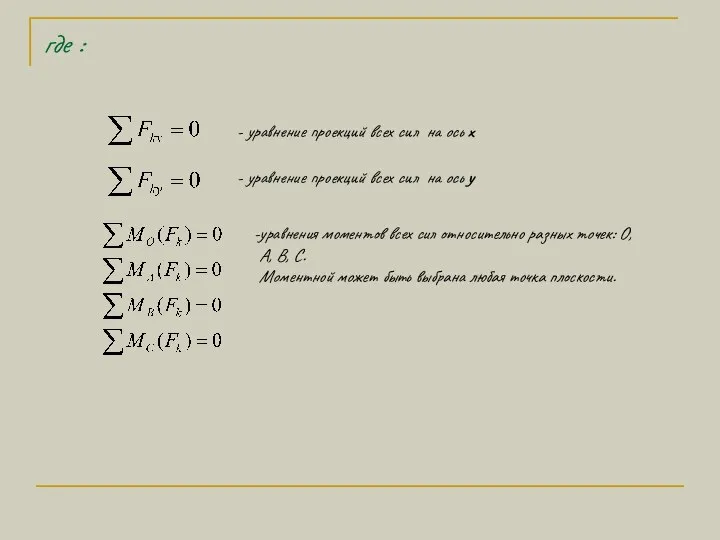
- 9. Условия равновесия произвольной плоской системы сил Необходимым и достаточным условием равновесия плоской системы сил являются равенство
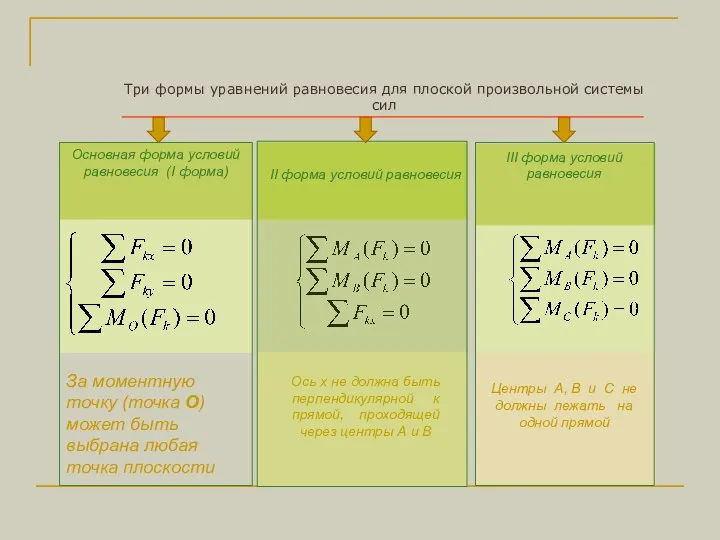
- 10. Ось х не должна быть перпендикулярной к прямой, проходящей через центры А и В Центры А,
- 11. - уравнение проекций всех сил на ось х - уравнение проекций всех сил на ось у
- 12. Важно ! Для одного твердого тела можно составить только три (!) независимых уравнения равновесия по одной
- 13. Важно ! В задаче на равновесие одного твердого тела может быть только три неизвестные силы (обычно
- 14. 3.3. Виды сил, действующих на тело
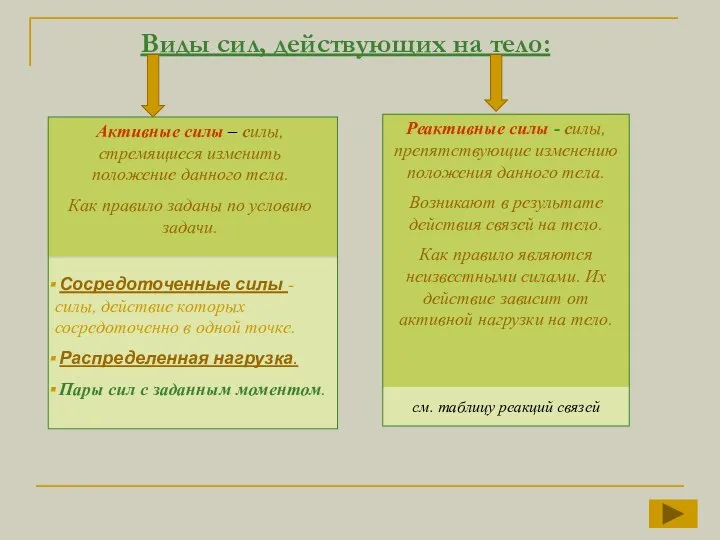
- 15. Виды сил, действующих на тело: см. таблицу реакций связей Активные силы – силы, стремящиеся изменить положение
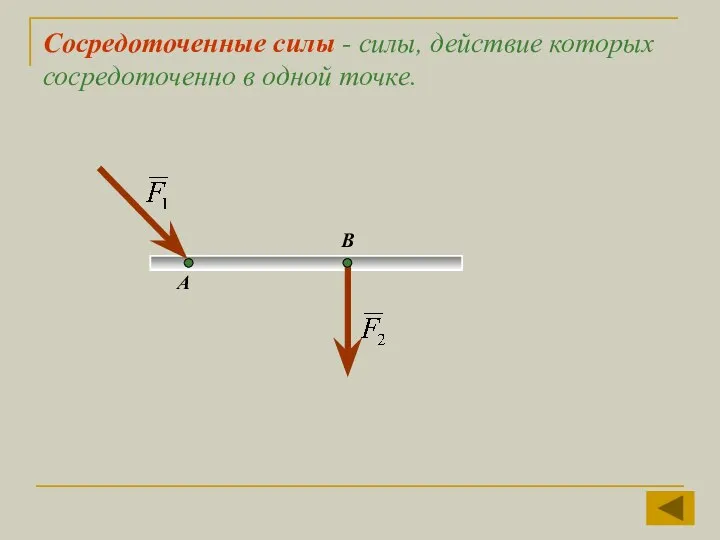
- 16. Сосредоточенные силы - силы, действие которых сосредоточенно в одной точке. А В
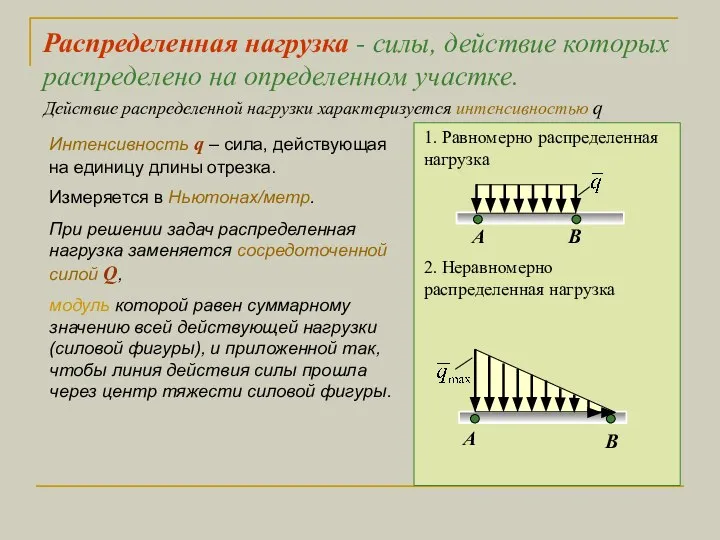
- 17. Распределенная нагрузка - силы, действие которых распределено на определенном участке. Действие распределенной нагрузки характеризуется интенсивностью q
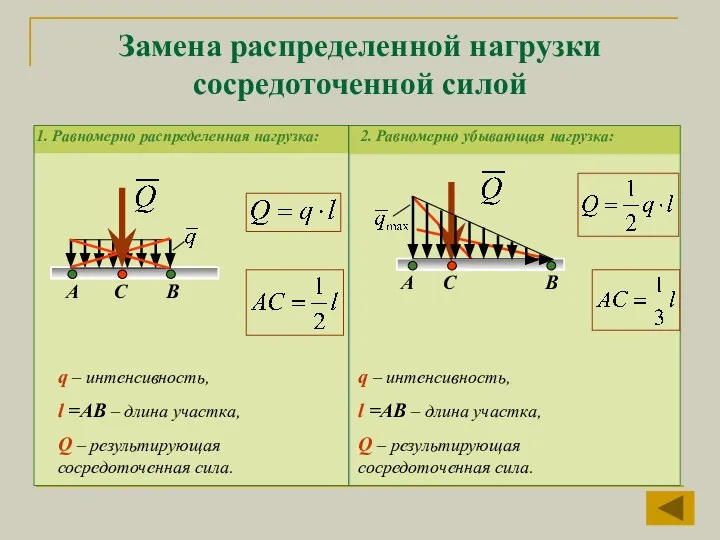
- 18. Замена распределенной нагрузки сосредоточенной силой 1. Равномерно распределенная нагрузка: А В С 2. Равномерно убывающая нагрузка:
- 20. Скачать презентацию
Слайд 3Плоской произвольной системой сил (ППСС) называется плоская система сил, линии действия которых
Плоской произвольной системой сил (ППСС) называется плоская система сил, линии действия которых
Слайд 4Приведение произвольной плоской системы сил к простейшему виду
1.Выберем центр приведения – точку
Приведение произвольной плоской системы сил к простейшему виду
1.Выберем центр приведения – точку
Слайд 5Приведение произвольной плоской системы сил к простейшему виду
3. В результате приведения всех
Приведение произвольной плоской системы сил к простейшему виду
3. В результате приведения всех

Слайд 6Приведение произвольной плоской системы сил к простейшему виду
4. Система сил, сходящихся в
Приведение произвольной плоской системы сил к простейшему виду
4. Система сил, сходящихся в
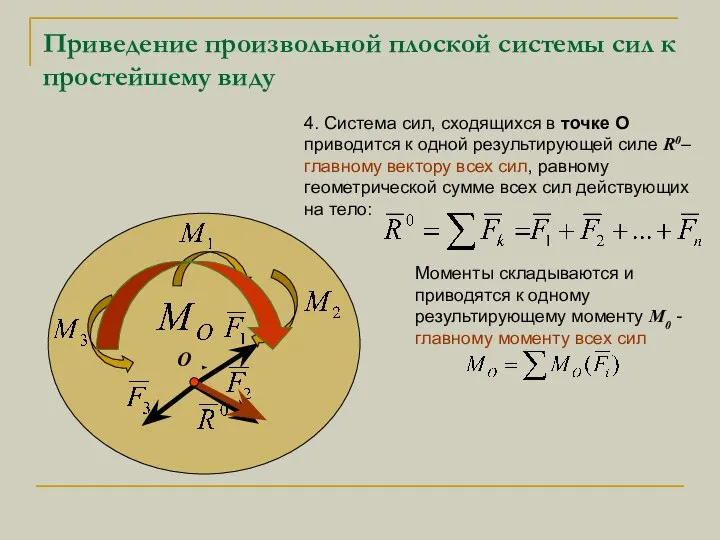
Слайд 7Таким образом произвольная плоская система сил приводится к главному вектору всех сил,
Таким образом произвольная плоская система сил приводится к главному вектору всех сил,
Слайд 83.2. Условия равновесия произвольной плоской системы сил
3.2. Условия равновесия произвольной плоской системы сил
Слайд 9Условия равновесия произвольной плоской системы сил
Необходимым и достаточным условием равновесия плоской системы
Условия равновесия произвольной плоской системы сил
Необходимым и достаточным условием равновесия плоской системы
Слайд 10Ось х не должна быть перпендикулярной к прямой, проходящей через центры А
Ось х не должна быть перпендикулярной к прямой, проходящей через центры А
Слайд 11- уравнение проекций всех сил на ось х
- уравнение проекций всех сил
- уравнение проекций всех сил на ось х
- уравнение проекций всех сил
Слайд 12Важно !
Для одного твердого тела можно составить только три (!) независимых уравнения
Важно !
Для одного твердого тела можно составить только три (!) независимых уравнения
Слайд 13Важно !
В задаче на равновесие одного твердого тела может быть только три
Важно !
В задаче на равновесие одного твердого тела может быть только три
Слайд 143.3. Виды сил, действующих на тело
3.3. Виды сил, действующих на тело
Слайд 15Виды сил, действующих на тело:
см. таблицу реакций связей
Активные силы – силы, стремящиеся
Виды сил, действующих на тело:
см. таблицу реакций связей
Активные силы – силы, стремящиеся
Слайд 16Сосредоточенные силы - силы, действие которых сосредоточенно в одной точке.
А
В
Сосредоточенные силы - силы, действие которых сосредоточенно в одной точке.
А
В
Слайд 17Распределенная нагрузка - силы, действие которых распределено на определенном участке.
Действие распределенной нагрузки
Распределенная нагрузка - силы, действие которых распределено на определенном участке.
Действие распределенной нагрузки
Слайд 18Замена распределенной нагрузки сосредоточенной силой
1. Равномерно распределенная нагрузка:
А
В
С
2. Равномерно убывающая нагрузка:
А
В
С
q –
Замена распределенной нагрузки сосредоточенной силой
1. Равномерно распределенная нагрузка:
А
В
С
2. Равномерно убывающая нагрузка:
А
В
С
q –
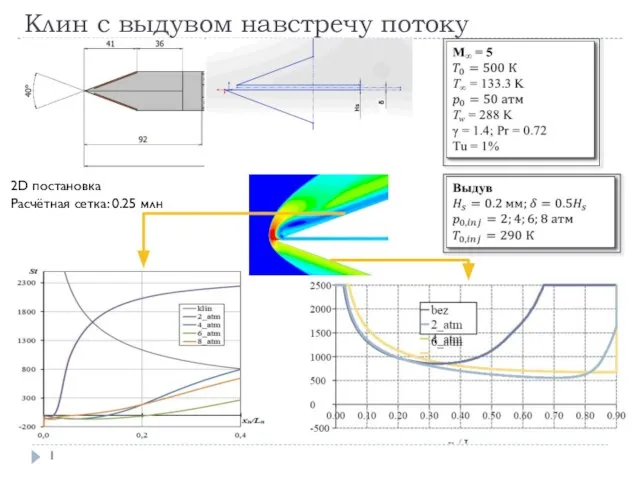 Клин с выдувом навстречу потоку
Клин с выдувом навстречу потоку Движение под углом к горизонту
Движение под углом к горизонту Импульс материальной точки. Другая формулировка второго закона Ньютона
Импульс материальной точки. Другая формулировка второго закона Ньютона Состояние вещества. Тест
Состояние вещества. Тест Амперметр. Измерение силы тока
Амперметр. Измерение силы тока Презентация на тему Конвекция. Излучение
Презентация на тему Конвекция. Излучение  Курс лекций по теоретической механике. Статика
Курс лекций по теоретической механике. Статика Физические свойства соленой воды
Физические свойства соленой воды Игра-КВН Первый урок в 8 классе
Игра-КВН Первый урок в 8 классе Последовательное соединение
Последовательное соединение opredelenie_koordinaty_dvizh_tela
opredelenie_koordinaty_dvizh_tela ФОМНЭ_2022_Лекция № 2
ФОМНЭ_2022_Лекция № 2 Равновесие сил с учётом трения покоя, сцепления
Равновесие сил с учётом трения покоя, сцепления Конструирование экспериментальных заданий по физике с использованием ментальных карт
Конструирование экспериментальных заданий по физике с использованием ментальных карт Сборка, регулировка и испытание охлаждения и смазки двигателей
Сборка, регулировка и испытание охлаждения и смазки двигателей Открытый урок по физике. Основной закон электростатики - закон Кулона
Открытый урок по физике. Основной закон электростатики - закон Кулона Исследование деформаций в тонкостенной цилиндрической оболочке
Исследование деформаций в тонкостенной цилиндрической оболочке Физика вокруг на
Физика вокруг на Постоянные магниты
Постоянные магниты Свойства полупроводниковых диодов
Свойства полупроводниковых диодов Биологическое действие радиоактивных излучений
Биологическое действие радиоактивных излучений Презентация на тему Сила трения скольжения
Презентация на тему Сила трения скольжения  Сила трения
Сила трения Методы расчетов резисторных схем постоянного тока.11 класс
Методы расчетов резисторных схем постоянного тока.11 класс Термодинамика. Подготовка к контрольной работе
Термодинамика. Подготовка к контрольной работе Построение изображений, полученных с помощью линз
Построение изображений, полученных с помощью линз Электроосветительные приборы
Электроосветительные приборы Взаимодействие тел
Взаимодействие тел