- Разработка систем аварийной посадки квадрокоптера

Содержание
- 2. Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов вращающихся диагонально в противоположных направлениях. квадрокоптер
- 3. Тактико-технические данные самого популярного квадрокоптера DJI Phantom 3 дальность радиоуправляемого полета и трансляции до 2000 м
- 4. Алгоритм приземления квадрокоптера при потере управляющего сигнала
- 5. Последствия потери управления квадрокоптером падение в воду столкновение с деревом столкновение с ЛЭП падение на человека
- 6. Алгоритм безопасной посадки квадрокоптера при потере управляющего сигнала в случае возможности продолжать автоматический полёт
- 7. Алгоритм безопасной посадки квадрокоптера при потере управляющего сигнала в случае падения
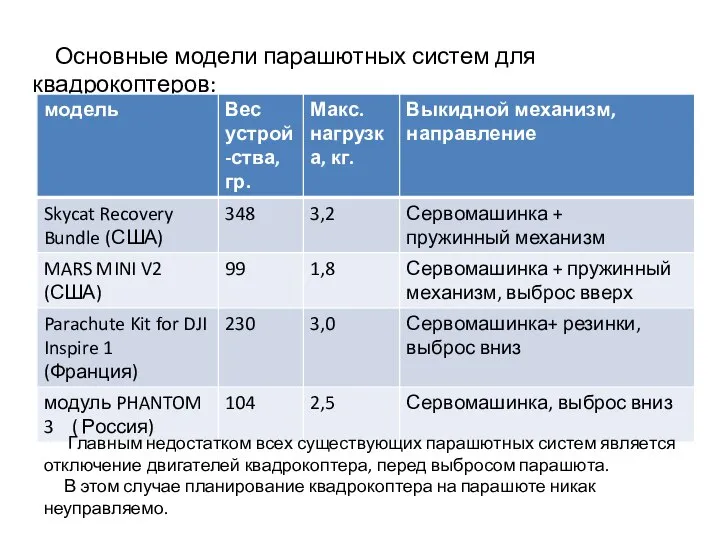
- 8. Основные модели парашютных систем для квадрокоптеров: Главным недостатком всех существующих парашютных систем является отключение двигателей квадрокоптера,
- 9. Структурная схема квадрокоптера
- 10. Таким образом, проектируемая система аварийной посадки квадрокоптера будет состоять из двух взаимосвязанных подсистем: 1) системы распознавания
- 12. Скачать презентацию
Слайд 2Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов вращающихся диагонально в противоположных направлениях.
квадрокоптер
Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов вращающихся диагонально в противоположных направлениях.
квадрокоптер

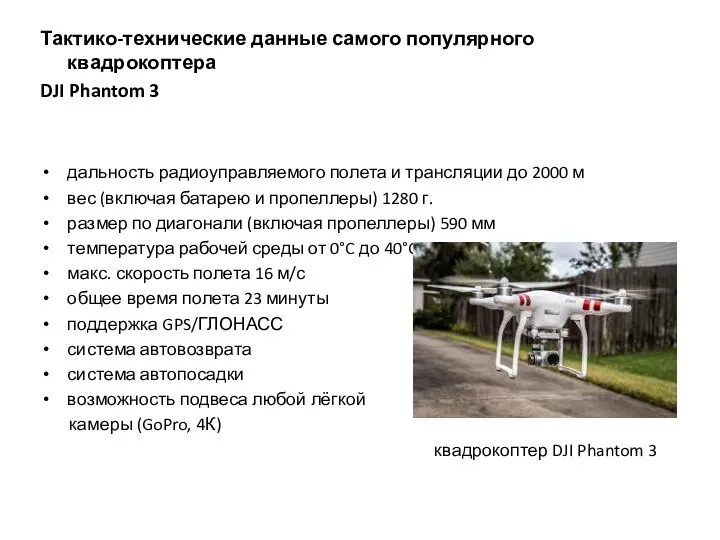
Слайд 3Тактико-технические данные самого популярного квадрокоптера
DJI Phantom 3
дальность радиоуправляемого полета и трансляции до 2000
Тактико-технические данные самого популярного квадрокоптера
DJI Phantom 3
дальность радиоуправляемого полета и трансляции до 2000
Слайд 4
Алгоритм приземления квадрокоптера при потере управляющего сигнала
Алгоритм приземления квадрокоптера при потере управляющего сигнала

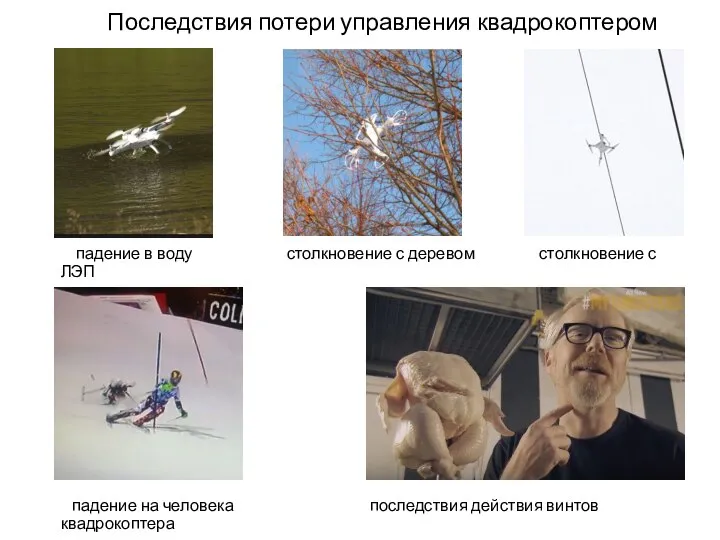
Слайд 5Последствия потери управления квадрокоптером
падение в воду столкновение с деревом столкновение с
Последствия потери управления квадрокоптером
падение в воду столкновение с деревом столкновение с
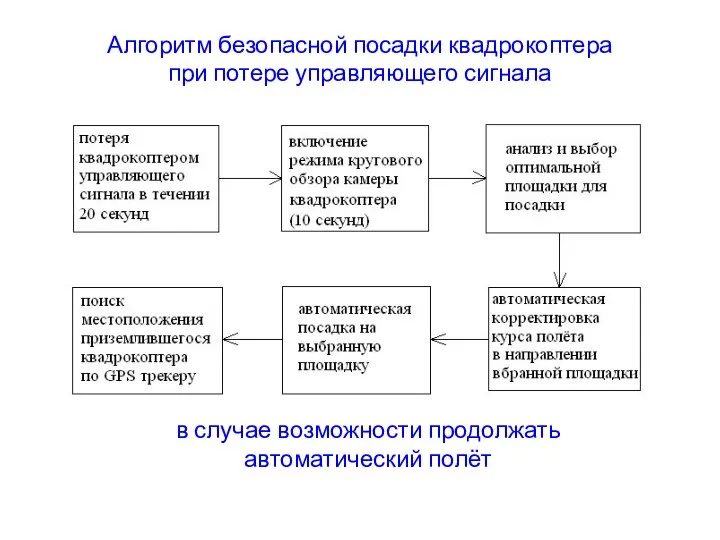
Слайд 6Алгоритм безопасной посадки квадрокоптера
при потере управляющего сигнала
в случае возможности продолжать автоматический
Алгоритм безопасной посадки квадрокоптера
при потере управляющего сигнала
в случае возможности продолжать автоматический
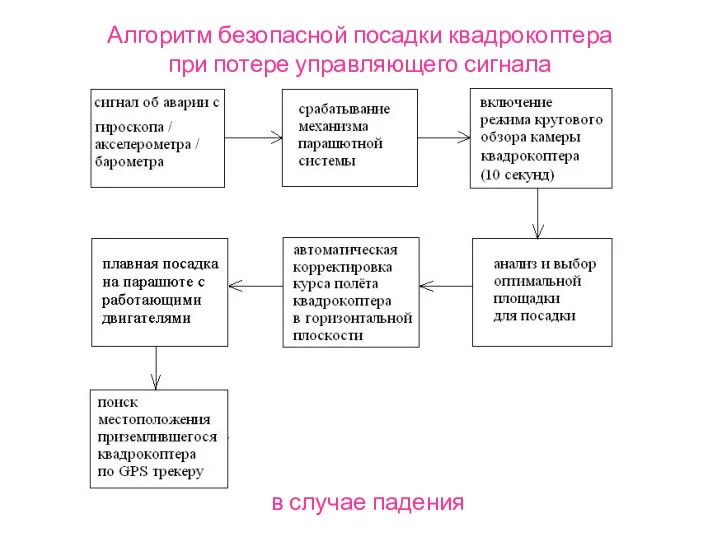
Слайд 7Алгоритм безопасной посадки квадрокоптера
при потере управляющего сигнала
в случае падения
Алгоритм безопасной посадки квадрокоптера
при потере управляющего сигнала
в случае падения
Слайд 8
Основные модели парашютных систем для квадрокоптеров:
Главным недостатком всех существующих парашютных
Основные модели парашютных систем для квадрокоптеров:
Главным недостатком всех существующих парашютных
Слайд 9
Структурная схема квадрокоптера
Структурная схема квадрокоптера

Слайд 10
Таким образом, проектируемая система аварийной посадки квадрокоптера будет состоять из двух
Таким образом, проектируемая система аварийной посадки квадрокоптера будет состоять из двух
 Презентация на тему Деление ядер урана Атомная энергетика
Презентация на тему Деление ядер урана Атомная энергетика  Применение УФЛ
Применение УФЛ Электростатика
Электростатика Необыкновенные оптические явления
Необыкновенные оптические явления Презентация на тему Внутренняя энергия (10 класс)
Презентация на тему Внутренняя энергия (10 класс)  Теплотехнические измерения. Практическое занятие
Теплотехнические измерения. Практическое занятие Теплопередача через однослойную стенку
Теплопередача через однослойную стенку Магнитная обработка нефтяного сырья с целью увеличения выхода светлых фракций
Магнитная обработка нефтяного сырья с целью увеличения выхода светлых фракций Силы гравитации
Силы гравитации Работа и мощность. Решение задач
Работа и мощность. Решение задач Взаимодействие тел
Взаимодействие тел Оптические датчики тока и напряжения
Оптические датчики тока и напряжения Оптические МЭМС. Актуаторы для оптических МЭМС-микрозеркала. Технология DLP
Оптические МЭМС. Актуаторы для оптических МЭМС-микрозеркала. Технология DLP Уход за швейной машиной
Уход за швейной машиной Корпускулярно-волновой дуализм
Корпускулярно-волновой дуализм Изменения в технике 2021 модельного года
Изменения в технике 2021 модельного года Разнообразие веществ в окружающем мире
Разнообразие веществ в окружающем мире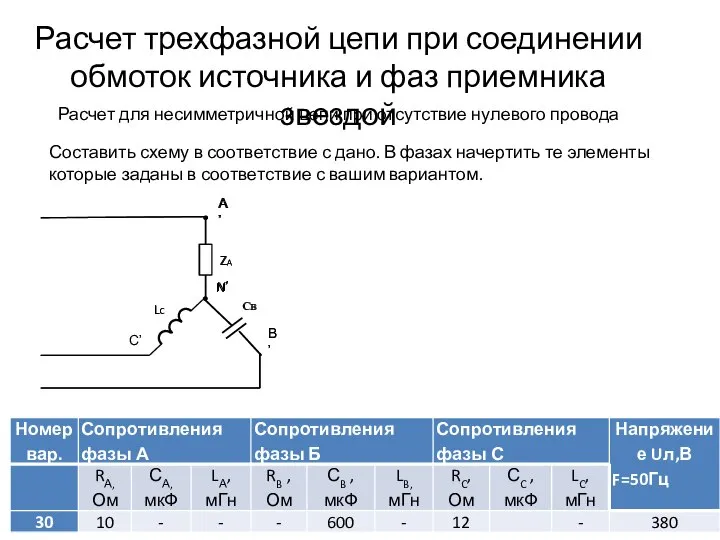 Расчет трехфазной цепи при соединении обмоток источника и фаз приемника звездой
Расчет трехфазной цепи при соединении обмоток источника и фаз приемника звездой Магнитное поле
Магнитное поле Презентация на тему Опыт Торричелли
Презентация на тему Опыт Торричелли  Презентация на тему Основные понятия и законы динамики
Презентация на тему Основные понятия и законы динамики  Давление твёрдых тел, жидкостей и газов
Давление твёрдых тел, жидкостей и газов Самоиндукция. Закон Фарадея для самоиндукции
Самоиндукция. Закон Фарадея для самоиндукции Лазеры
Лазеры Фрикционные передачи
Фрикционные передачи Презентация на тему Скорость. Единицы скорости (7 класс)
Презентация на тему Скорость. Единицы скорости (7 класс)  Letecká navigace
Letecká navigace Электрическое поле заряженных проводников. Энергия электростатического поля. Лекция 4
Электрическое поле заряженных проводников. Энергия электростатического поля. Лекция 4