- Структурный анализ плоского механизма

Содержание
- 2. Требуется: 1. Построить структурную схему механизма; 2. Провести классификацию звеньев механизма; 3. Провести классификацию кинематических пар;
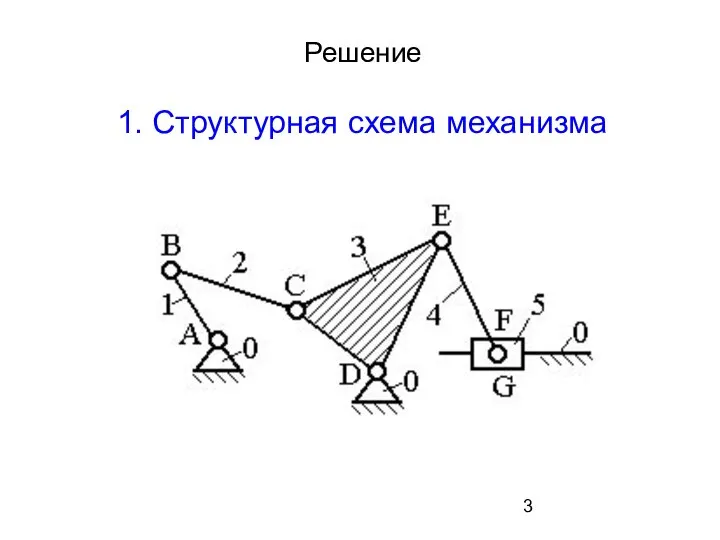
- 3. Решение 1. Структурная схема механизма
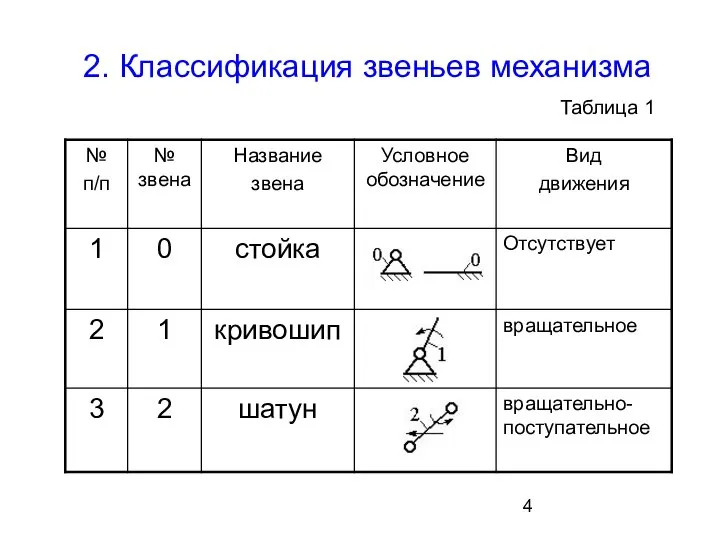
- 4. 2. Классификация звеньев механизма Таблица 1
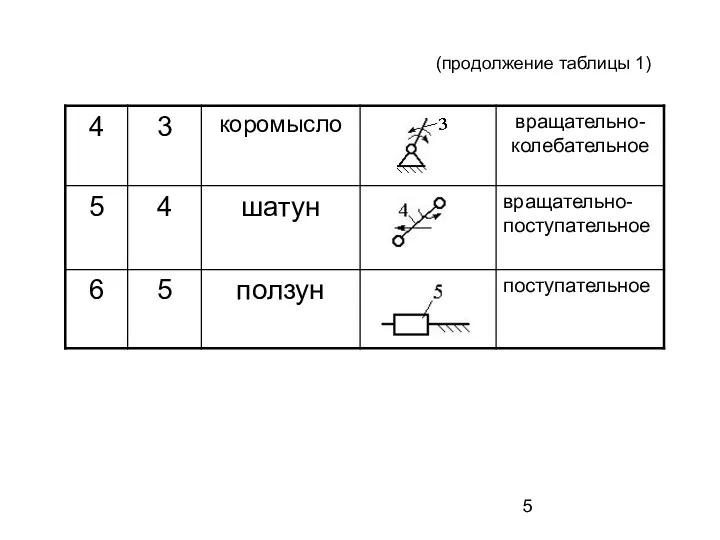
- 5. (продолжение таблицы 1)
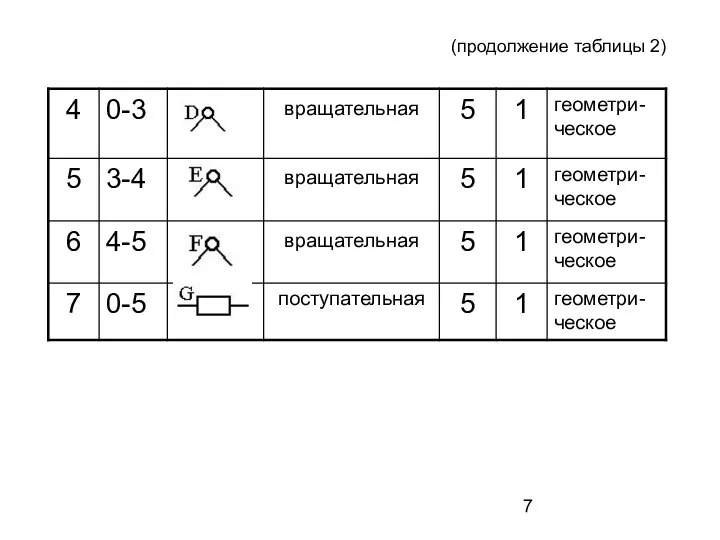
- 6. 3. Классификация кинематических пар Таблица 2 № звеньев, образующих пару Подвижность Класс Замыкание Условное обозначение
- 7. (продолжение таблицы 2)
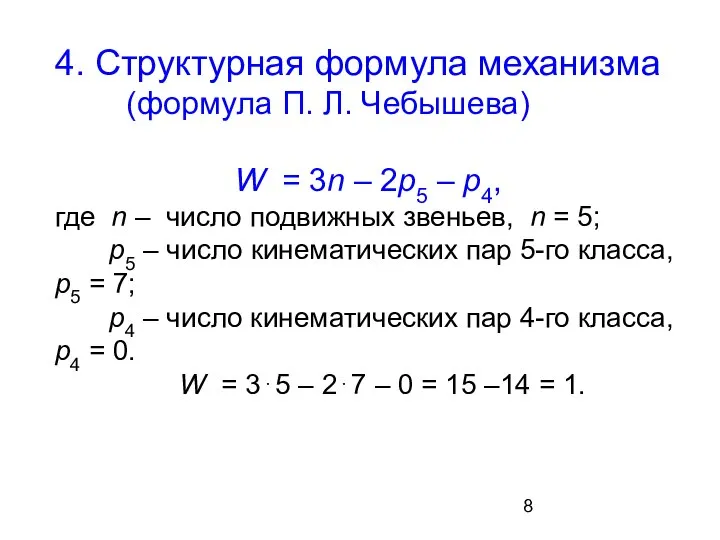
- 8. 4. Структурная формула механизма (формула П. Л. Чебышева) W = 3n – 2р5 – р4, где
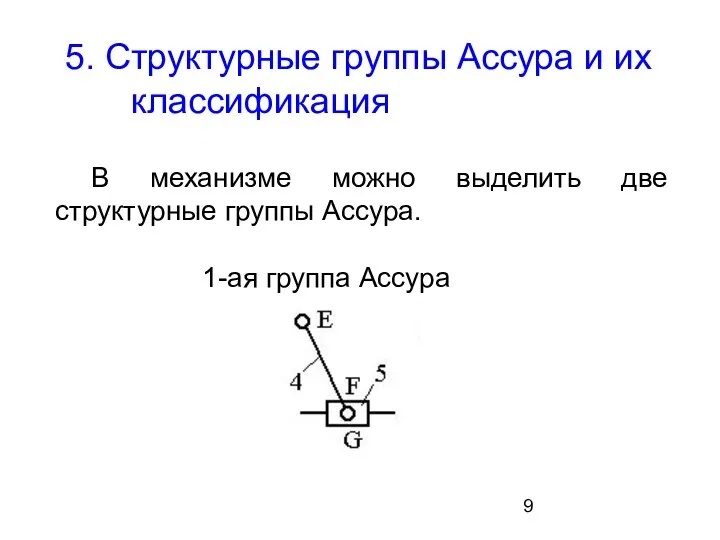
- 9. 5. Структурные группы Ассура и их классификация В механизме можно выделить две структурные группы Ассура. 1-ая
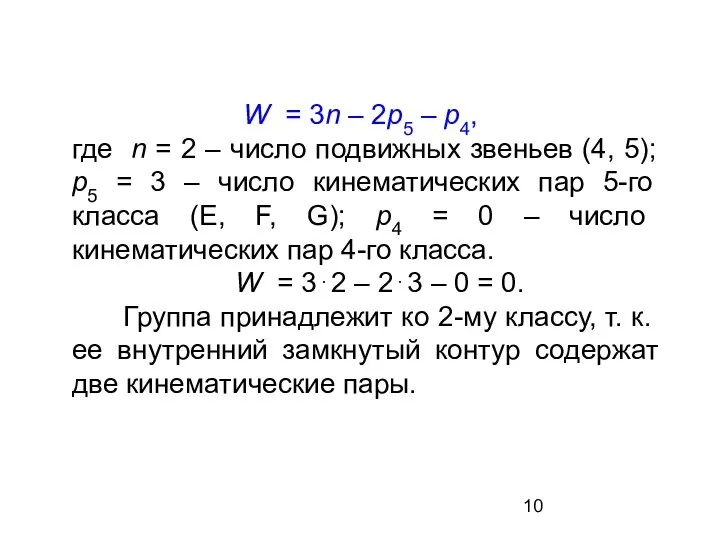
- 10. W = 3n – 2р5 – р4, где n = 2 – число подвижных звеньев (4,
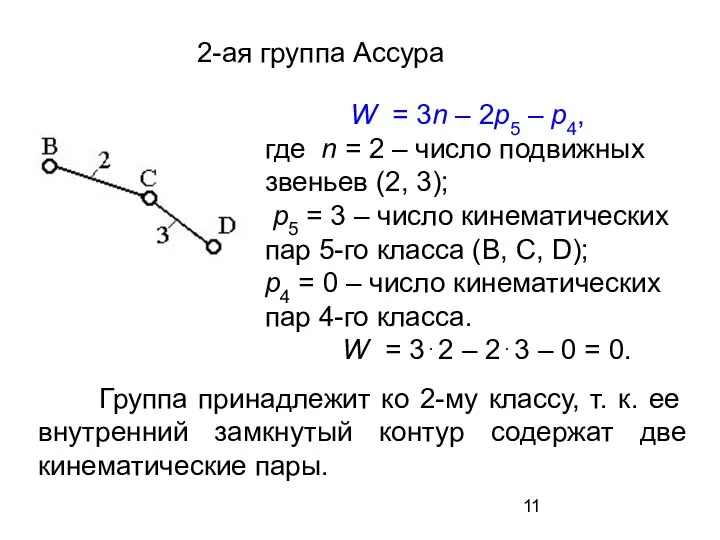
- 11. 2-ая группа Ассура W = 3n – 2р5 – р4, где n = 2 – число
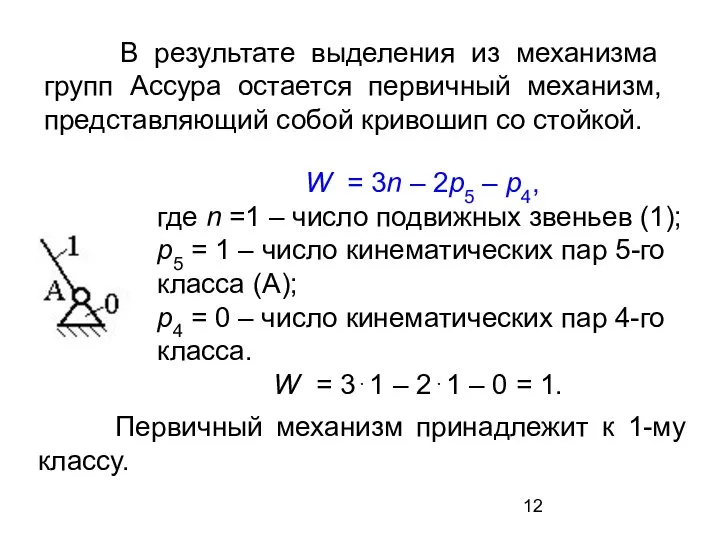
- 12. В результате выделения из механизма групп Ассура остается первичный механизм, представляющий собой кривошип со стойкой. W
- 14. Скачать презентацию
Слайд 2 Требуется:
1. Построить структурную схему механизма;
2. Провести классификацию звеньев механизма;
Требуется:
1. Построить структурную схему механизма;
2. Провести классификацию звеньев механизма;
Слайд 3 Решение
1. Структурная схема механизма
Решение
1. Структурная схема механизма
Слайд 42. Классификация звеньев механизма
Таблица 1
2. Классификация звеньев механизма
Таблица 1
Слайд 5 (продолжение таблицы 1)
(продолжение таблицы 1)
Слайд 6 3. Классификация кинематических пар
Таблица 2
№ звеньев,
образующих
пару
Подвижность
Класс
Замыкание
Условное
обозначение
3. Классификация кинематических пар
Таблица 2
№ звеньев,
образующих
пару
Подвижность
Класс
Замыкание
Условное
обозначение

Слайд 7 (продолжение таблицы 2)
(продолжение таблицы 2)
Слайд 84. Структурная формула механизма (формула П. Л. Чебышева)
W = 3n
4. Структурная формула механизма (формула П. Л. Чебышева)
W = 3n
Слайд 9 5. Структурные группы Ассура и их классификация
В механизме можно выделить
5. Структурные группы Ассура и их классификация
В механизме можно выделить
Слайд 10 W = 3n – 2р5 – р4,
где n = 2 –
W = 3n – 2р5 – р4,
где n = 2 –
Слайд 112-ая группа Ассура
W = 3n – 2р5 – р4,
где n
2-ая группа Ассура
W = 3n – 2р5 – р4,
где n
Слайд 12 В результате выделения из механизма групп Ассура остается первичный механизм, представляющий
В результате выделения из механизма групп Ассура остается первичный механизм, представляющий
 Физика лазера
Физика лазера Физическая викторина
Физическая викторина Топливо будущего
Топливо будущего Работа при повороте тела. Кинетическая энергия вращающегося твердого тела
Работа при повороте тела. Кинетическая энергия вращающегося твердого тела Альтернативная энергетика
Альтернативная энергетика Законы Ньютона
Законы Ньютона Правила работы с микроскопом
Правила работы с микроскопом Порядок действий при сборке конструкции/ механизма
Порядок действий при сборке конструкции/ механизма Магнитное поле
Магнитное поле Презентация на тему Экономия использования энергетических ресурсов на земле
Презентация на тему Экономия использования энергетических ресурсов на земле 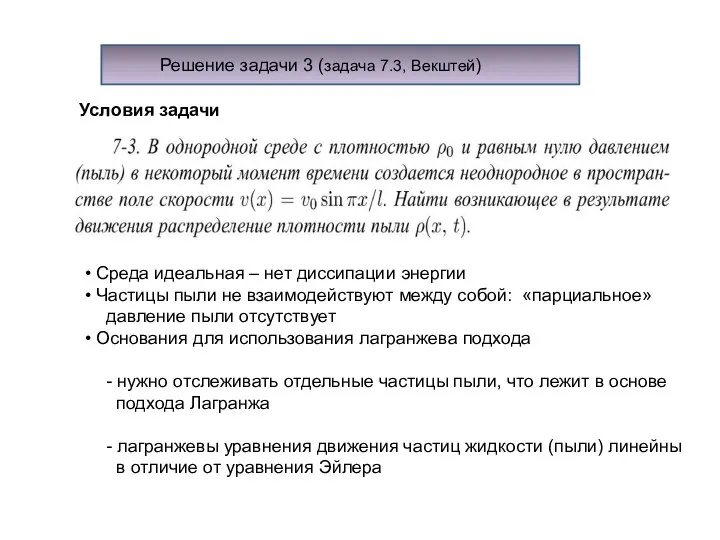 Подход Лагранжа
Подход Лагранжа Электродинамика
Электродинамика Форд Бронко
Форд Бронко Основы расчетов на жесткость деталей машин. Лекция 7
Основы расчетов на жесткость деталей машин. Лекция 7 Формирование гибких технологий и ремонта системы питания газобаллонных автомобилей
Формирование гибких технологий и ремонта системы питания газобаллонных автомобилей Презентация на тему Плавление
Презентация на тему Плавление  Проектирование содержания образования (СО). Модуль
Проектирование содержания образования (СО). Модуль Свет
Свет Презентация на тему Оптические приборы
Презентация на тему Оптические приборы  Источники радиоактивных загрязнений
Источники радиоактивных загрязнений Муниципальное автономное общеобразовательное учреждение Муниципальное автономное общеобразовательное учреждение «Средняя об
Муниципальное автономное общеобразовательное учреждение Муниципальное автономное общеобразовательное учреждение «Средняя об Экспертные советы по теоретической физике
Экспертные советы по теоретической физике Как создать суперкар и решить задачи, возникающие при его создании
Как создать суперкар и решить задачи, возникающие при его создании Презентация на тему Магнитные свойства вещества
Презентация на тему Магнитные свойства вещества  Механика
Механика Основы квантовой физики
Основы квантовой физики Чудеса электричества
Чудеса электричества Презентация на тему Постоянные магниты
Презентация на тему Постоянные магниты