- Сумо. Уровень 3

Содержание
- 2. Повторяем правила: Соблюдаем тишину, когда преподаватель говорит! Не стесняемся задавать вопросы! Работаем в команде!
- 3. Повторение
- 4. Сумо Сумо роботов
- 5. Сумо
- 6. Сумо Вспомним, какие параметры робота влияют на победу: Мощность и количество моторов. Масса. Устойчивость. Сцепление с
- 7. Мощность моторов Можно повысить мощность моторов?
- 8. Масса Что такое масса? От чего зависит масса нашего робота? На что влияет масса робота?
- 9. Устойчивость
- 10. Устойчивость
- 11. Сцепление с поверхностью Что такое сцепление? От чего зависит сцепление?
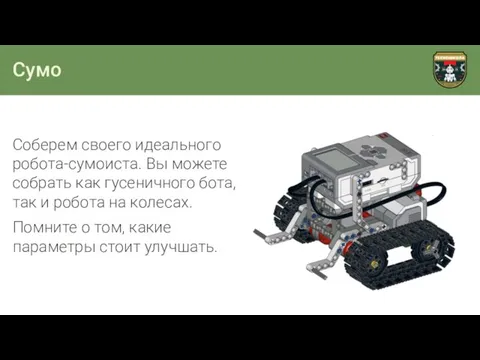
- 12. Сумо Соберем своего идеального робота-сумоиста. Вы можете собрать как гусеничного бота, так и робота на колесах.
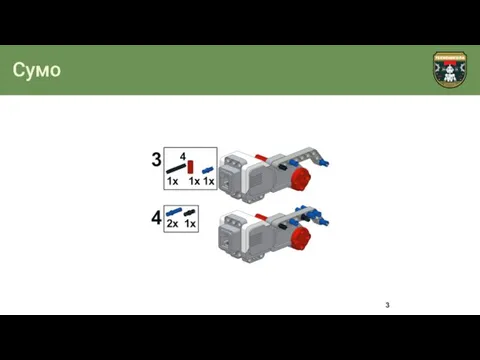
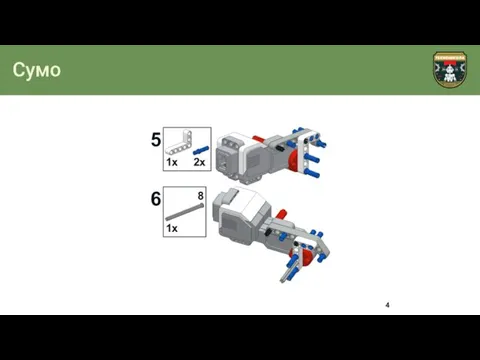
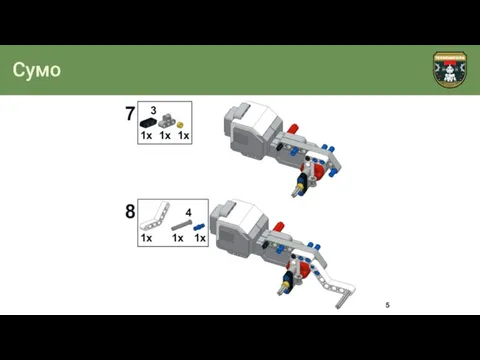
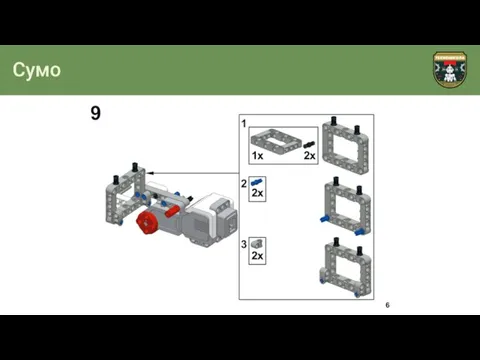
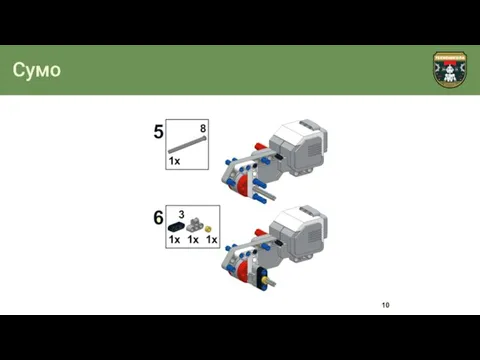
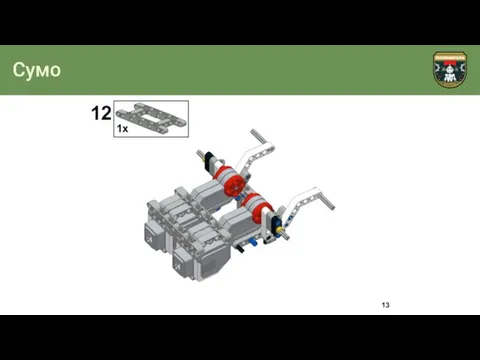
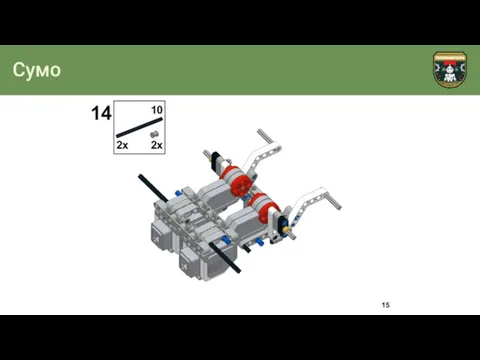
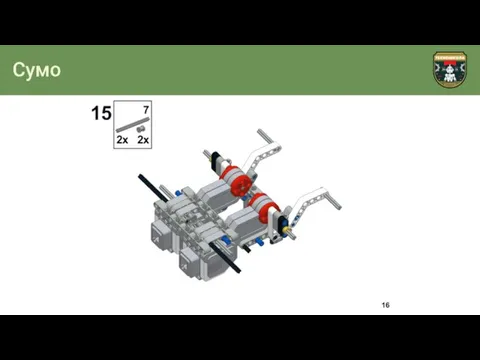
- 13. Сборка Соберем робота.
- 14. Сумо
- 15. Сумо
- 16. Сумо
- 17. Сумо
- 18. Сумо
- 19. Сумо
- 20. Сумо
- 21. Сумо
- 22. Сумо
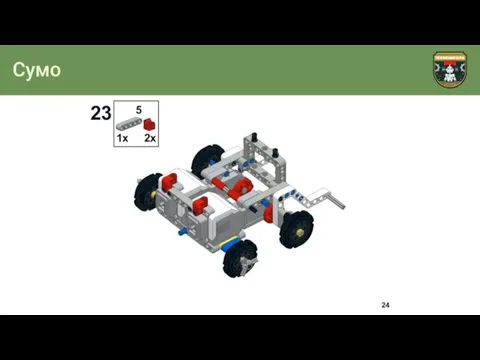
- 23. Сумо
- 24. Сумо
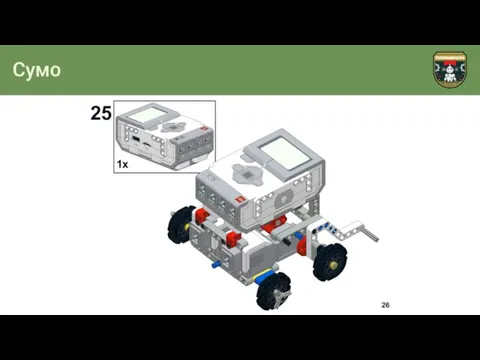
- 25. Сумо
- 26. Сумо
- 27. Сумо
- 28. Сумо
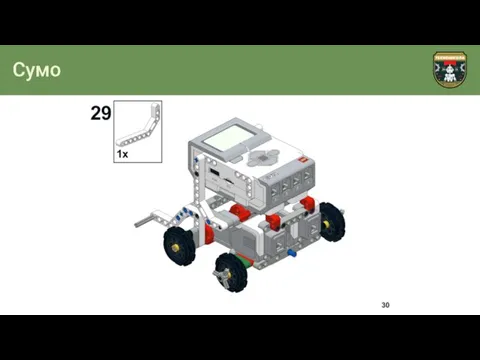
- 29. Сумо
- 30. Сумо
- 31. Сумо
- 32. Сумо
- 33. Сумо
- 34. Сумо
- 35. Сумо
- 36. Сумо
- 37. Сумо
- 38. Сумо
- 39. Сумо
- 40. Сумо
- 41. Сумо
- 42. Сумо
- 43. Сумо
- 44. Сумо
- 45. Сумо
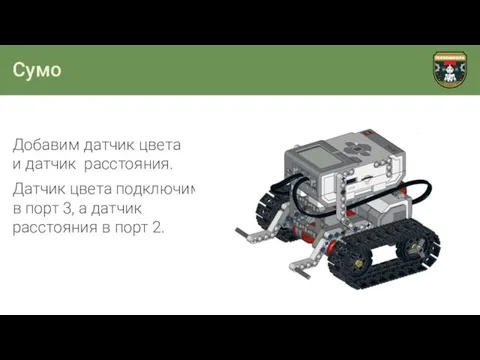
- 46. Сумо Добавим датчик цвета и датчик расстояния. Датчик цвета подключим в порт 3, а датчик расстояния
- 47. Программирование Создадим программу.
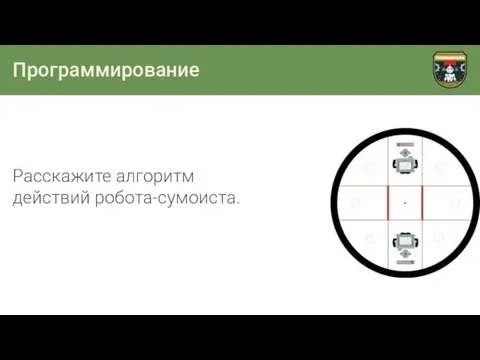
- 48. Программирование Расскажите алгоритм действий робота-сумоиста.
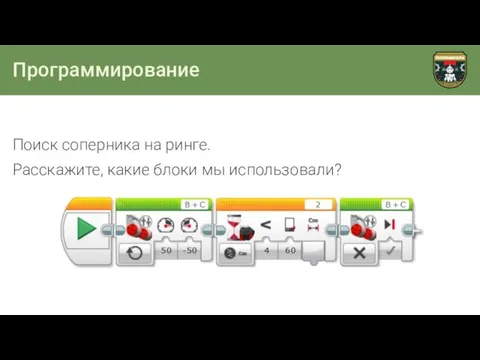
- 49. Программирование Поиск соперника на ринге. Расскажите, какие блоки мы использовали?
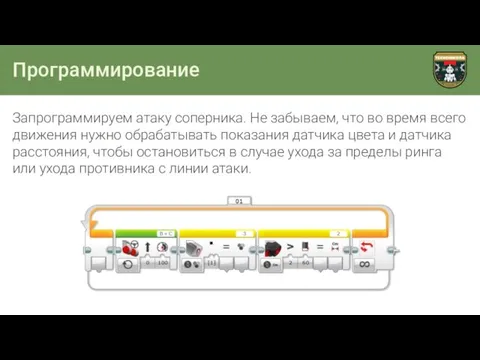
- 50. Программирование Запрограммируем атаку соперника. Не забываем, что во время всего движения нужно обрабатывать показания датчика цвета
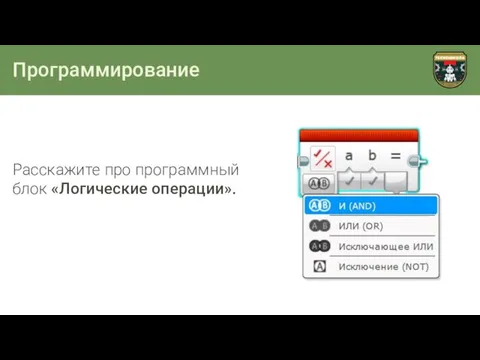
- 51. Программирование Расскажите про программный блок «Логические операции».
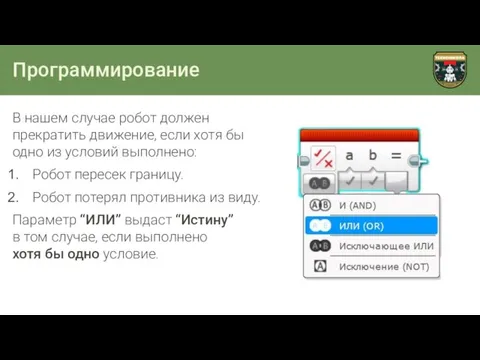
- 52. Программирование В нашем случае робот должен прекратить движение, если хотя бы одно из условий выполнено: Робот
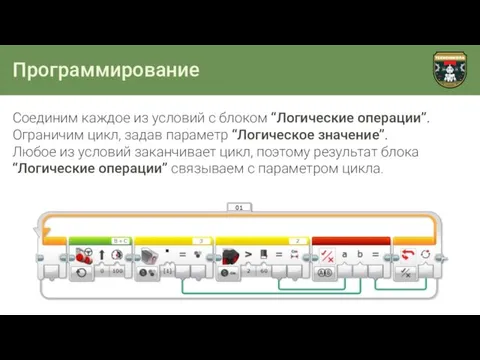
- 53. Программирование Соединим каждое из условий с блоком “Логические операции”. Ограничим цикл, задав параметр “Логическое значение”. Любое
- 54. Программирование После атаки, если она оказалась неудачной (соперник вовремя увернулся, а робот доехал до границы ринга),
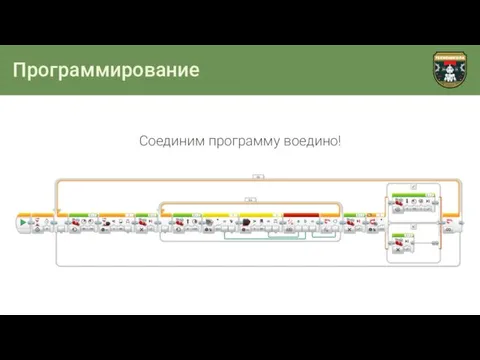
- 55. Программирование Соединим программу воедино!
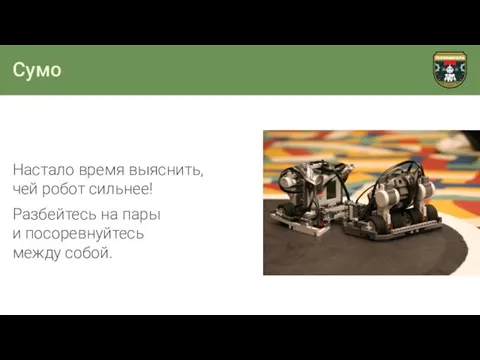
- 56. Сумо Настало время выяснить, чей робот сильнее! Разбейтесь на пары и посоревнуйтесь между собой.
- 58. Скачать презентацию
Слайд 2Повторяем правила:
Соблюдаем тишину, когда преподаватель говорит!
Не стесняемся задавать вопросы!
Работаем в команде!
Повторяем правила:
Соблюдаем тишину, когда преподаватель говорит!
Не стесняемся задавать вопросы!
Работаем в команде!
Слайд 3Повторение
Повторение
Слайд 4Сумо
Сумо роботов
Сумо
Сумо роботов

Слайд 5Сумо
Сумо

Слайд 6Сумо
Вспомним, какие параметры робота влияют на победу:
Мощность и количество моторов.
Масса.
Устойчивость.
Сцепление с поверхностью.
Сумо
Вспомним, какие параметры робота влияют на победу:
Мощность и количество моторов.
Масса.
Устойчивость.
Сцепление с поверхностью.
Слайд 7Мощность моторов
Можно повысить мощность моторов?
Мощность моторов
Можно повысить мощность моторов?
Слайд 8Масса
Что такое масса?
От чего зависит масса нашего робота?
На что влияет масса робота?
Масса
Что такое масса?
От чего зависит масса нашего робота?
На что влияет масса робота?
Слайд 9Устойчивость
Устойчивость

Слайд 10Устойчивость
Устойчивость

Слайд 11Сцепление с поверхностью
Что такое сцепление?
От чего зависит сцепление?
Сцепление с поверхностью
Что такое сцепление?
От чего зависит сцепление?

Слайд 12Сумо
Соберем своего идеального робота-сумоиста. Вы можете собрать как гусеничного бота, так и
Сумо
Соберем своего идеального робота-сумоиста. Вы можете собрать как гусеничного бота, так и
Слайд 13Сборка
Соберем робота.
Сборка
Соберем робота.
Слайд 14Сумо
Сумо
Слайд 15Сумо
Сумо
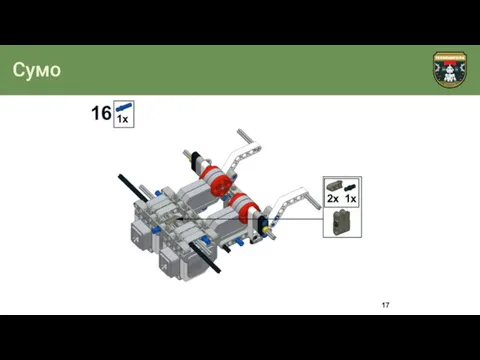
Слайд 16Сумо
Сумо
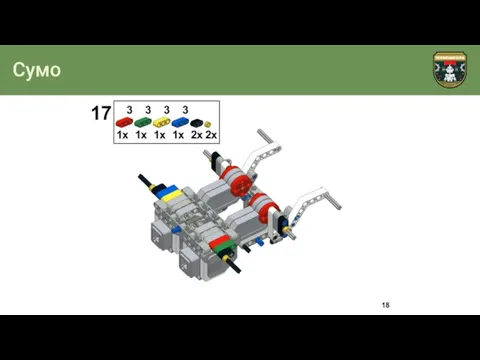
Слайд 17Сумо
Сумо
Слайд 18Сумо
Сумо
Слайд 19Сумо
Сумо

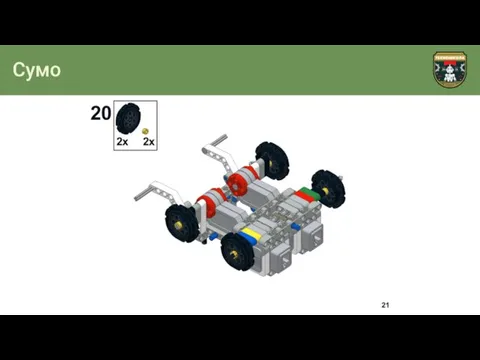
Слайд 20Сумо
Сумо

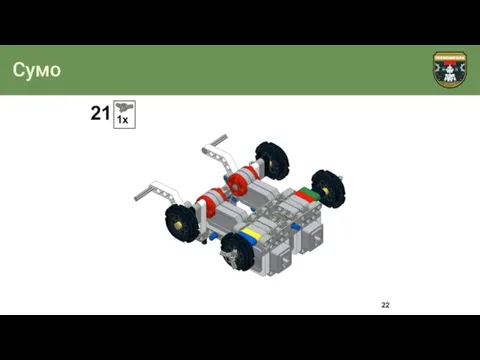
Слайд 21Сумо
Сумо

Слайд 22Сумо
Сумо
Слайд 23Сумо
Сумо

Слайд 24Сумо
Сумо

Слайд 25Сумо
Сумо
Слайд 26Сумо
Сумо

Слайд 27Сумо
Сумо
Слайд 28Сумо
Сумо
Слайд 29Сумо
Сумо
Слайд 30Сумо
Сумо
Слайд 31Сумо
Сумо

Слайд 32Сумо
Сумо

Слайд 33Сумо
Сумо
Слайд 34Сумо
Сумо
Слайд 35Сумо
Сумо

Слайд 36Сумо
Сумо
Слайд 37Сумо
Сумо

Слайд 38Сумо
Сумо
Слайд 39Сумо
Сумо

Слайд 40Сумо
Сумо

Слайд 41Сумо
Сумо

Слайд 42Сумо
Сумо
Слайд 43Сумо
Сумо

Слайд 44Сумо
Сумо

Слайд 45Сумо
Сумо

Слайд 46Сумо
Добавим датчик цвета
и датчик расстояния.
Датчик цвета подключим
в порт 3,
Сумо
Добавим датчик цвета
и датчик расстояния.
Датчик цвета подключим
в порт 3,
Слайд 47Программирование
Создадим программу.
Программирование
Создадим программу.
Слайд 48Программирование
Расскажите алгоритм действий робота-сумоиста.
Программирование
Расскажите алгоритм действий робота-сумоиста.
Слайд 49Программирование
Поиск соперника на ринге.
Расскажите, какие блоки мы использовали?
Программирование
Поиск соперника на ринге.
Расскажите, какие блоки мы использовали?
Слайд 50Программирование
Запрограммируем атаку соперника. Не забываем, что во время всего движения нужно обрабатывать
Программирование
Запрограммируем атаку соперника. Не забываем, что во время всего движения нужно обрабатывать
Слайд 51Программирование
Расскажите про программный блок «Логические операции».
Программирование
Расскажите про программный блок «Логические операции».
Слайд 52Программирование
В нашем случае робот должен прекратить движение, если хотя бы одно из
Программирование
В нашем случае робот должен прекратить движение, если хотя бы одно из
Слайд 53Программирование
Соединим каждое из условий с блоком “Логические операции”. Ограничим цикл, задав параметр
Программирование
Соединим каждое из условий с блоком “Логические операции”. Ограничим цикл, задав параметр
Слайд 54Программирование
После атаки, если она оказалась неудачной (соперник вовремя увернулся, а робот доехал
Программирование
После атаки, если она оказалась неудачной (соперник вовремя увернулся, а робот доехал

Слайд 55Программирование
Соединим программу воедино!
Программирование
Соединим программу воедино!
Слайд 56Сумо
Настало время выяснить, чей робот сильнее!
Разбейтесь на пары
и посоревнуйтесь
между собой.
Сумо
Настало время выяснить, чей робот сильнее!
Разбейтесь на пары
и посоревнуйтесь
между собой.
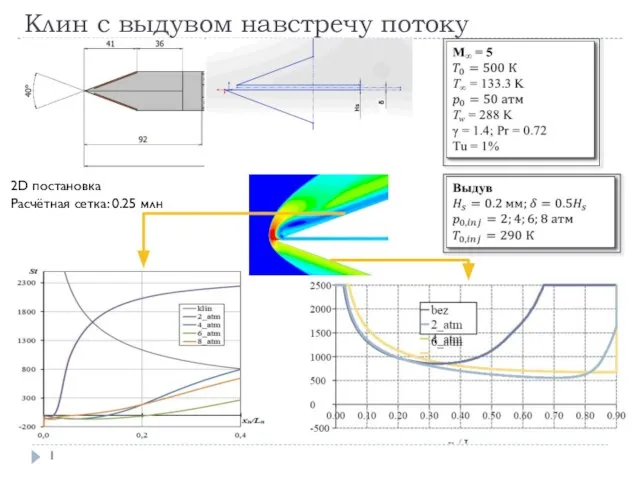 Клин с выдувом навстречу потоку
Клин с выдувом навстречу потоку Движение под углом к горизонту
Движение под углом к горизонту Импульс материальной точки. Другая формулировка второго закона Ньютона
Импульс материальной точки. Другая формулировка второго закона Ньютона Состояние вещества. Тест
Состояние вещества. Тест Амперметр. Измерение силы тока
Амперметр. Измерение силы тока Презентация на тему Конвекция. Излучение
Презентация на тему Конвекция. Излучение  Курс лекций по теоретической механике. Статика
Курс лекций по теоретической механике. Статика Физические свойства соленой воды
Физические свойства соленой воды Игра-КВН Первый урок в 8 классе
Игра-КВН Первый урок в 8 классе Последовательное соединение
Последовательное соединение opredelenie_koordinaty_dvizh_tela
opredelenie_koordinaty_dvizh_tela ФОМНЭ_2022_Лекция № 2
ФОМНЭ_2022_Лекция № 2 Равновесие сил с учётом трения покоя, сцепления
Равновесие сил с учётом трения покоя, сцепления Конструирование экспериментальных заданий по физике с использованием ментальных карт
Конструирование экспериментальных заданий по физике с использованием ментальных карт Сборка, регулировка и испытание охлаждения и смазки двигателей
Сборка, регулировка и испытание охлаждения и смазки двигателей Открытый урок по физике. Основной закон электростатики - закон Кулона
Открытый урок по физике. Основной закон электростатики - закон Кулона Исследование деформаций в тонкостенной цилиндрической оболочке
Исследование деформаций в тонкостенной цилиндрической оболочке Физика вокруг на
Физика вокруг на Постоянные магниты
Постоянные магниты Свойства полупроводниковых диодов
Свойства полупроводниковых диодов Биологическое действие радиоактивных излучений
Биологическое действие радиоактивных излучений Презентация на тему Сила трения скольжения
Презентация на тему Сила трения скольжения  Сила трения
Сила трения Методы расчетов резисторных схем постоянного тока.11 класс
Методы расчетов резисторных схем постоянного тока.11 класс Термодинамика. Подготовка к контрольной работе
Термодинамика. Подготовка к контрольной работе Построение изображений, полученных с помощью линз
Построение изображений, полученных с помощью линз Электроосветительные приборы
Электроосветительные приборы Взаимодействие тел
Взаимодействие тел