- Теоретическая механика. Модуль 1. Раздел 1 – статика

Содержание
- 2. Введение в статику 1.2 Статика - раздел механики, в котором излагается общее учение о силах и
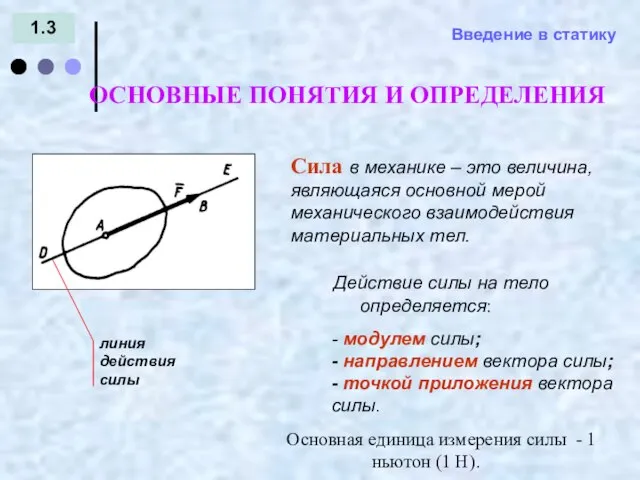
- 3. Введение в статику 1.3 Сила в механике – это величина, являющаяся основной мерой механического взаимодействия материальных
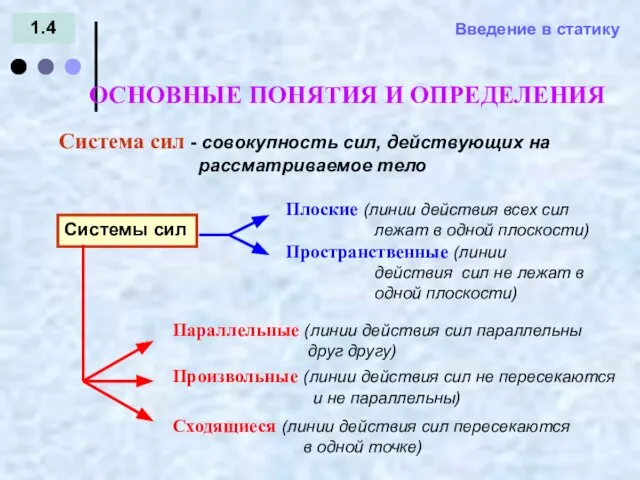
- 4. Введение в статику 1.4 Система сил - совокупность сил, действующих на рассматриваемое тело ОСНОВНЫЕ ПОНЯТИЯ И
- 5. Введение в статику 1.5 Эквивалентными называются две системы сил, приводящие тело к одному и тому же
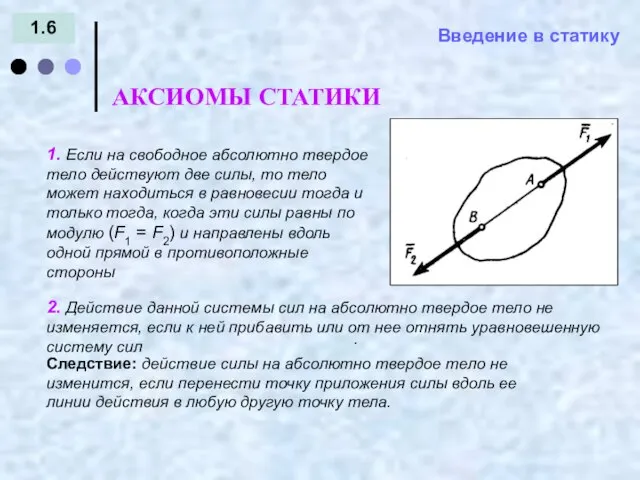
- 6. Введение в статику 1.6 АКСИОМЫ СТАТИКИ
- 7. Введение в статику 1.7 АКСИОМЫ СТАТИКИ 3. Закон параллелограмма сил: две силы, приложенные к телу в
- 8. Введение в статику 1.8 АКСИОМЫ СТАТИКИ = - 4. Закон равенства действия и противодействия: при всяком
- 9. Введение в статику 1.9 СВЯЗИ И ИХ РЕАКЦИИ = -
- 10. Введение в статику 1.10 СВЯЗИ И ИХ РЕАКЦИИ = -
- 11. Введение в статику 1.11 СВЯЗИ И ИХ РЕАКЦИИ = -
- 12. ЛЕКЦИЯ 2 План: 2.1 МЕХАНИКА 2.1. Проекции сил. 2.2. Момент силы относительно точки и относительно оси.
- 13. Введение в статику 2.2 ПРОЕКЦИИ СИЛ = - Проекция силы на ось - алгебраическая величина, равная
- 14. Введение в статику 2.3 ПРОЕКЦИИ СИЛ = - Проекция силы на плоскость это вектор , заключенный
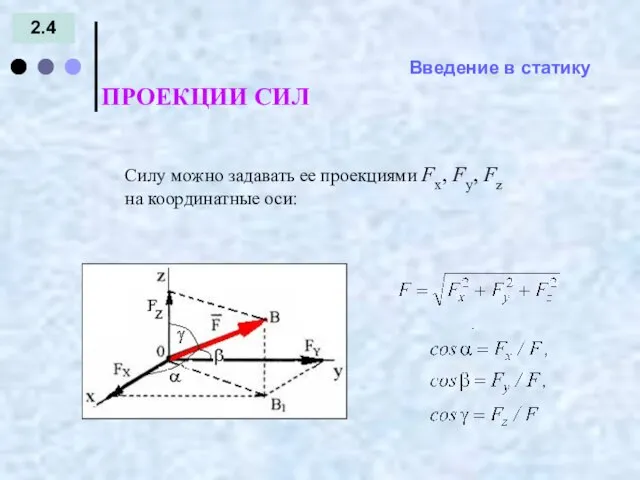
- 15. Введение в статику 2.4 ПРОЕКЦИИ СИЛ = - Силу можно задавать ее проекциями Fx, Fy, Fz
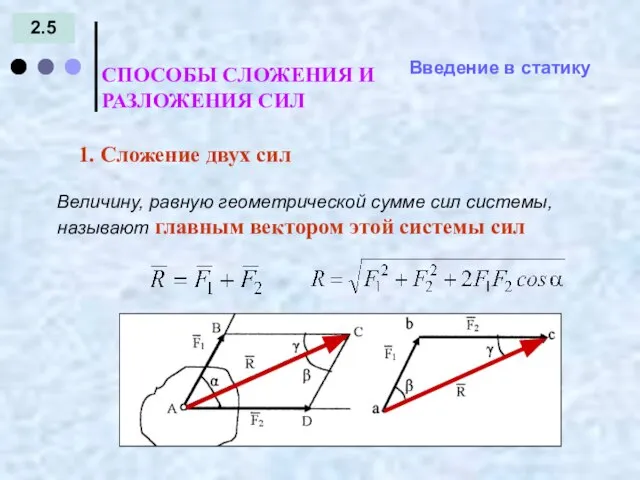
- 16. Введение в статику 2.5 СПОСОБЫ СЛОЖЕНИЯ И РАЗЛОЖЕНИЯ СИЛ = - Величину, равную геометрической сумме сил
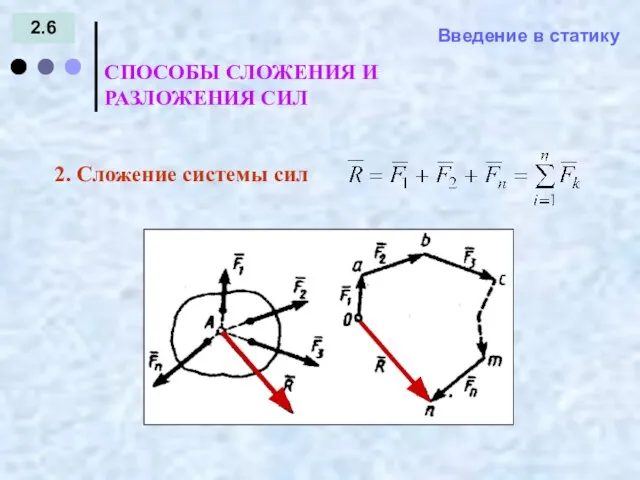
- 17. Введение в статику 2.6 = - 2. Сложение системы сил СПОСОБЫ СЛОЖЕНИЯ И РАЗЛОЖЕНИЯ СИЛ
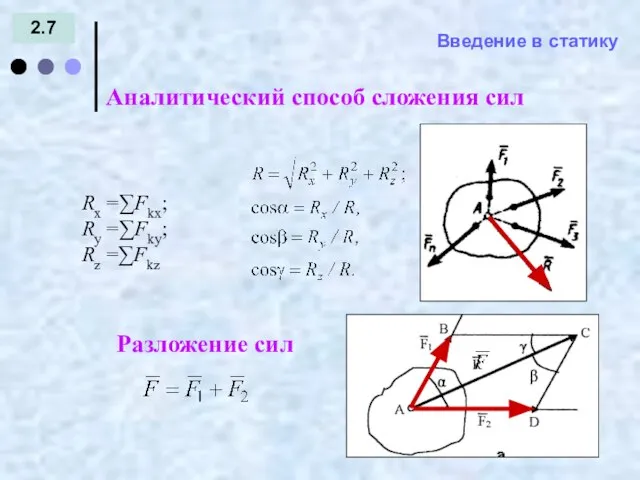
- 18. Введение в статику 2.7 Аналитический способ сложения сил = - Rx =∑Fkx; Ry =∑Fky; Rz =∑Fkz
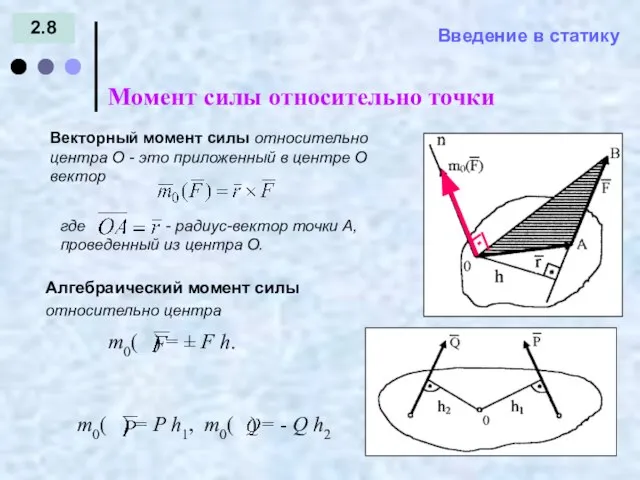
- 19. Введение в статику 2.8 Момент силы относительно точки = - Векторный момент силы относительно центра О
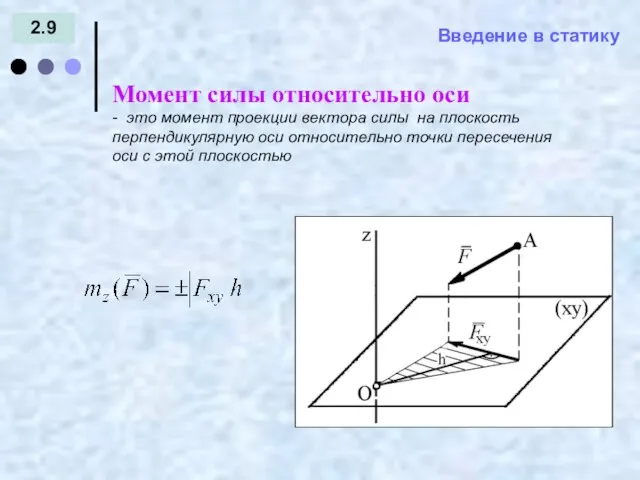
- 20. Введение в статику 2.9 Момент силы относительно оси = - - это момент проекции вектора силы
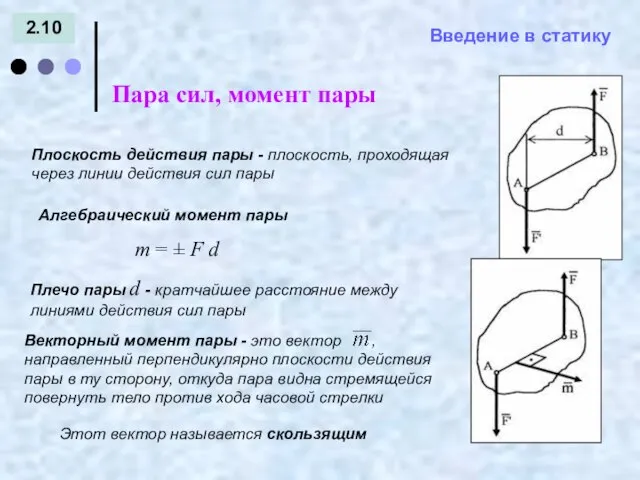
- 21. Введение в статику 2.10 Пара сил, момент пары = - Плечо пары d - кратчайшее расстояние
- 22. ЛЕКЦИЯ 3 План: 3.1 МЕХАНИКА 3.1. Теорема о параллельном переносе силы. 3.2. Приведение системы сил к
- 23. Введение в статику 3.2 Теорема о параллельном переносе силы = - Силу, приложенную к абсолютно твердому
- 24. Введение в статику 3.3 Приведение системы сил к центру = - .
- 25. Введение в статику 3.4 = - Частные случаи приведения системы сил к центру: Приведение системы сил
- 26. ЛЕКЦИЯ 4 План: 4.1 МЕХАНИКА 4.1. Теорема Вариньона. 4.2. Условия равновесия различных систем сил. СТАТИКА Модуль
- 27. 4.2 ТЕОРЕМА ВАРИНЬОНА Пусть система сил приводится к равнодействующей Если данная система сил имеет равнодействующую, то
- 28. 4.3 УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ Равновесие пространственной системы произвольно расположенных сил Условия равновесия Равновесие пространственной
- 29. 4.4 Условия равновесия УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ Равновесие системы сходящихся сил в геометрической форме: необходимо
- 30. 4.5 Условия равновесия Равновесие плоской системы произвольных сил УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
- 31. 4.6 Условия равновесия Равновесие плоской системы параллельных сил УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ точки A и
- 32. ЛЕКЦИЯ 5 План: 5.1 МЕХАНИКА 5.1. Равновесие систем тел. 5.2. Равновесие тела при наличии трения СТАТИКА
- 33. 5.2 РАВНОВЕСИЕ СИСТЕМ ТЕЛ Условия равновесия Внутренние связи – это связи, соединяющие части конструкции Два способа
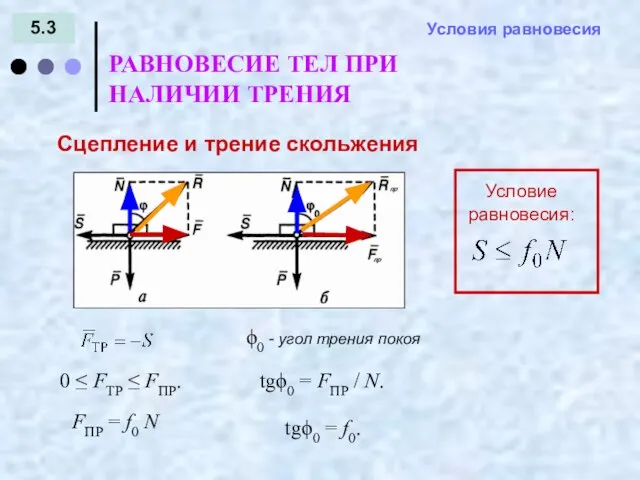
- 34. 5.3 РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ = - Условия равновесия Сцепление и трение скольжения Условие равновесия:
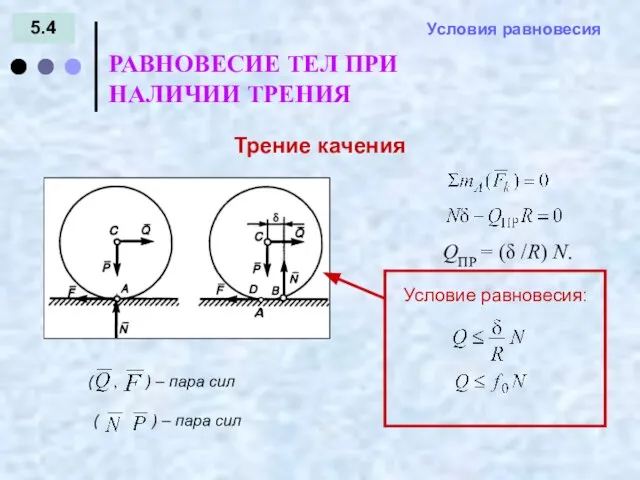
- 35. 5.4 = - Условия равновесия Трение качения РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ QПР = (δ /R)
- 36. ЛЕКЦИЯ 5 План: 6.1 МЕХАНИКА 6.1. Центр параллельных сил 6.2. Центр тяжести твердого тела СТАТИКА Модуль
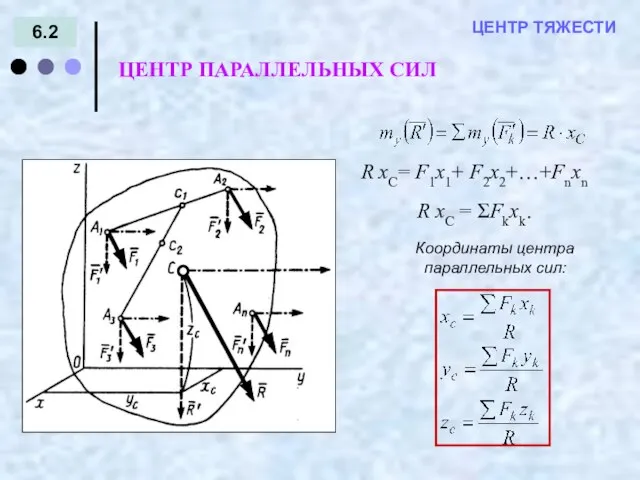
- 37. 6.2 ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ = - ЦЕНТР ТЯЖЕСТИ Координаты центра параллельных сил:
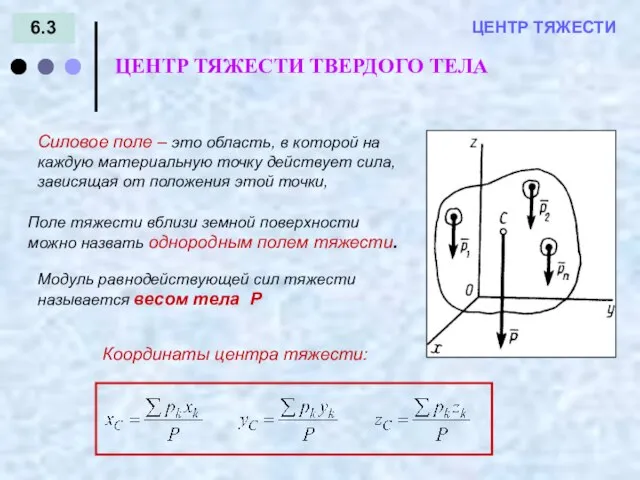
- 38. 6.3 ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА = - ЦЕНТР ТЯЖЕСТИ Силовое поле – это область, в которой
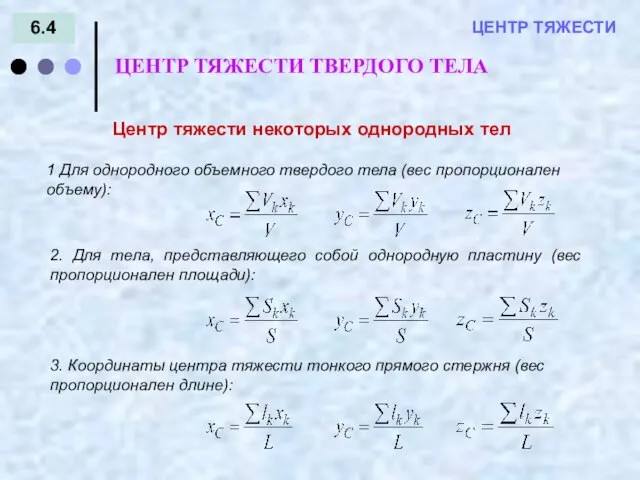
- 39. 6.4 = - ЦЕНТР ТЯЖЕСТИ ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
- 41. Скачать презентацию
Слайд 3Введение в статику
1.3
Сила в механике – это величина, являющаяся основной мерой механического
Введение в статику
1.3
Сила в механике – это величина, являющаяся основной мерой механического
Слайд 4Введение в статику
1.4
Система сил - совокупность сил, действующих на
рассматриваемое
Введение в статику
1.4
Система сил - совокупность сил, действующих на
рассматриваемое
Слайд 5Введение в статику
1.5
Эквивалентными называются две системы сил, приводящие тело к одному и
Введение в статику
1.5
Эквивалентными называются две системы сил, приводящие тело к одному и

Слайд 6Введение в статику
1.6
АКСИОМЫ СТАТИКИ
Введение в статику
1.6
АКСИОМЫ СТАТИКИ
Слайд 7Введение в статику
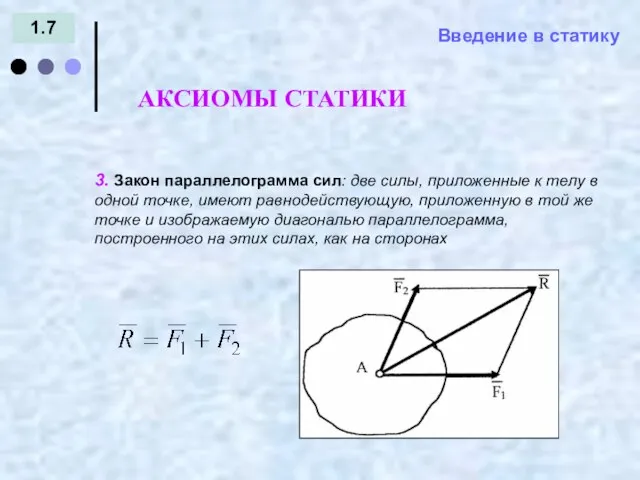
1.7
АКСИОМЫ СТАТИКИ
3. Закон параллелограмма сил: две силы, приложенные к
Введение в статику
1.7
АКСИОМЫ СТАТИКИ
3. Закон параллелограмма сил: две силы, приложенные к
Слайд 8Введение в статику
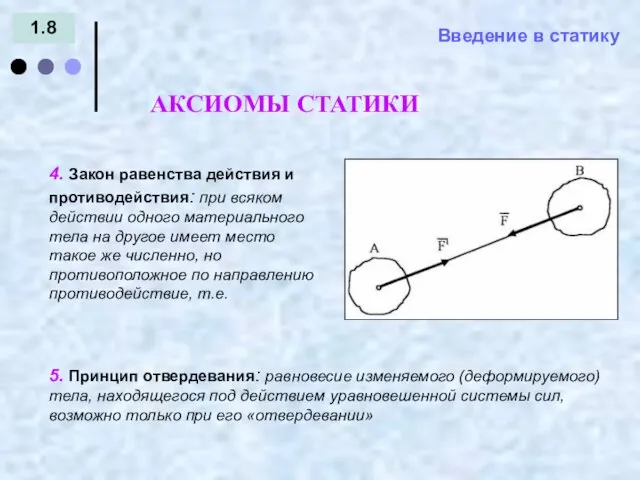
1.8
АКСИОМЫ СТАТИКИ
= -
4. Закон равенства действия и противодействия:
Введение в статику
1.8
АКСИОМЫ СТАТИКИ
= -
4. Закон равенства действия и противодействия:
Слайд 9Введение в статику
1.9
СВЯЗИ И ИХ РЕАКЦИИ
= -
Введение в статику
1.9
СВЯЗИ И ИХ РЕАКЦИИ
= -
Слайд 10Введение в статику
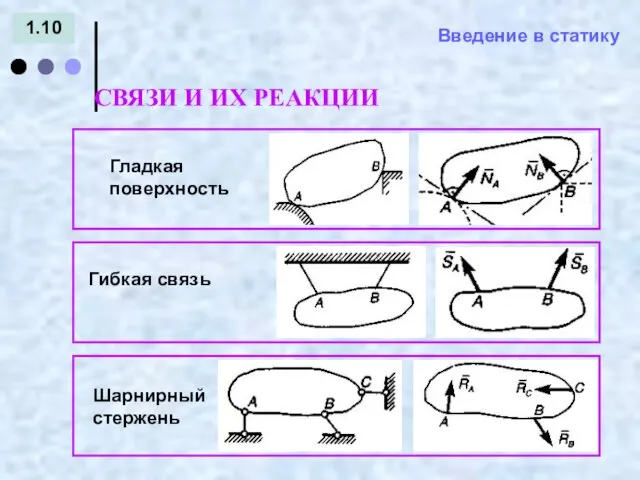
1.10
СВЯЗИ И ИХ РЕАКЦИИ
= -
Введение в статику
1.10
СВЯЗИ И ИХ РЕАКЦИИ
= -
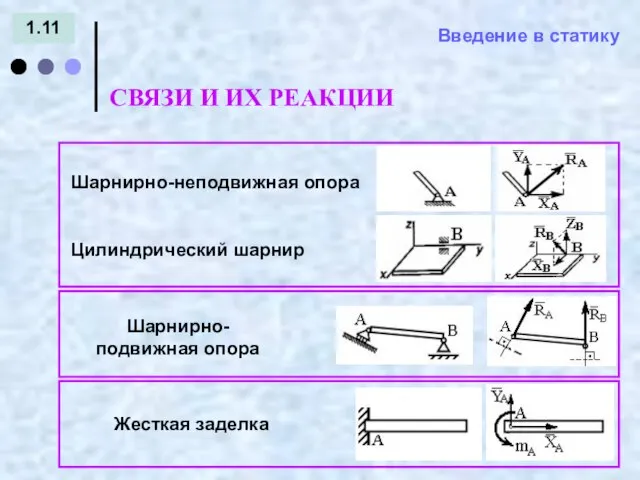
Слайд 11Введение в статику
1.11
СВЯЗИ И ИХ РЕАКЦИИ
= -
Введение в статику
1.11
СВЯЗИ И ИХ РЕАКЦИИ
= -
Слайд 12ЛЕКЦИЯ 2 План:
2.1
МЕХАНИКА
2.1. Проекции сил.
2.2. Момент силы относительно точки и относительно
ЛЕКЦИЯ 2 План:
2.1
МЕХАНИКА
2.1. Проекции сил.
2.2. Момент силы относительно точки и относительно
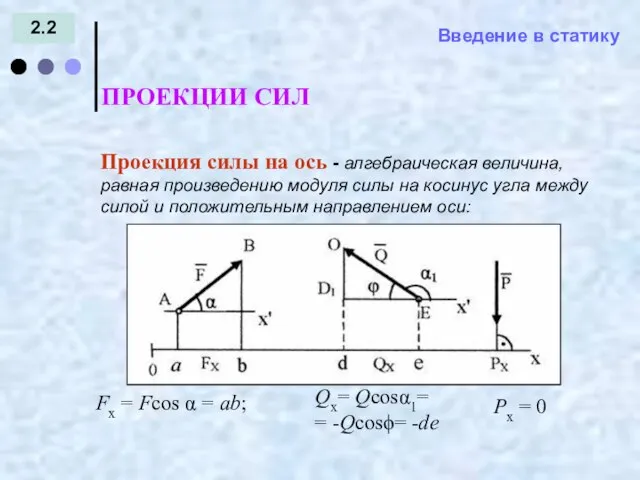
Слайд 13Введение в статику
2.2
ПРОЕКЦИИ СИЛ
= -
Проекция силы на ось - алгебраическая величина,
Введение в статику
2.2
ПРОЕКЦИИ СИЛ
= -
Проекция силы на ось - алгебраическая величина,
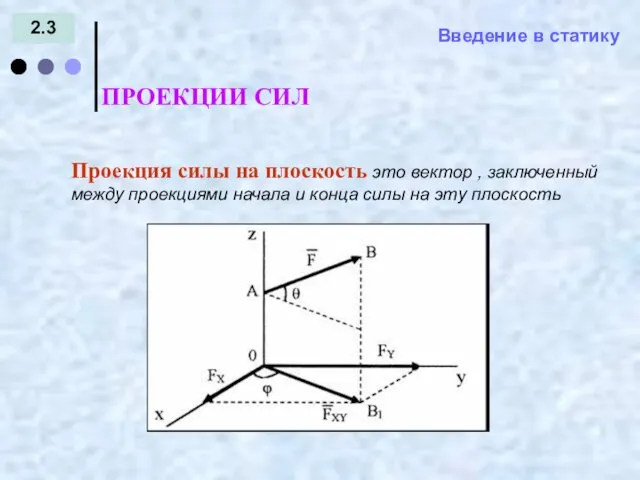
Слайд 14Введение в статику
2.3
ПРОЕКЦИИ СИЛ
= -
Проекция силы на плоскость это вектор
Введение в статику
2.3
ПРОЕКЦИИ СИЛ
= -
Проекция силы на плоскость это вектор
Слайд 15Введение в статику
2.4
ПРОЕКЦИИ СИЛ
= -
Силу можно задавать ее проекциями Fx, Fy,
Введение в статику
2.4
ПРОЕКЦИИ СИЛ
= -
Силу можно задавать ее проекциями Fx, Fy,
Слайд 16Введение в статику
2.5
СПОСОБЫ СЛОЖЕНИЯ И РАЗЛОЖЕНИЯ СИЛ
= -
Величину, равную геометрической
Введение в статику
2.5
СПОСОБЫ СЛОЖЕНИЯ И РАЗЛОЖЕНИЯ СИЛ
= -
Величину, равную геометрической
Слайд 17Введение в статику
2.6
= -
2. Сложение системы сил
СПОСОБЫ СЛОЖЕНИЯ И
Введение в статику
2.6
= -
2. Сложение системы сил
СПОСОБЫ СЛОЖЕНИЯ И
Слайд 18Введение в статику
2.7
Аналитический способ сложения сил
= -
Rx =∑Fkx;
Ry =∑Fky;
Rz
Введение в статику
2.7
Аналитический способ сложения сил
= -
Rx =∑Fkx;
Ry =∑Fky;
Rz
Слайд 19Введение в статику
2.8
Момент силы относительно точки
= -
Векторный момент силы относительно
Введение в статику
2.8
Момент силы относительно точки
= -
Векторный момент силы относительно
Слайд 20Введение в статику
2.9
Момент силы относительно оси
= -
- это момент проекции вектора
Введение в статику
2.9
Момент силы относительно оси
= -
- это момент проекции вектора
Слайд 21Введение в статику
2.10
Пара сил, момент пары
= -
Плечо пары d -
Введение в статику
2.10
Пара сил, момент пары
= -
Плечо пары d -
Слайд 22ЛЕКЦИЯ 3 План:
3.1
МЕХАНИКА
3.1. Теорема о параллельном переносе силы.
3.2. Приведение системы сил
ЛЕКЦИЯ 3 План:
3.1
МЕХАНИКА
3.1. Теорема о параллельном переносе силы.
3.2. Приведение системы сил
Слайд 23Введение в статику
3.2
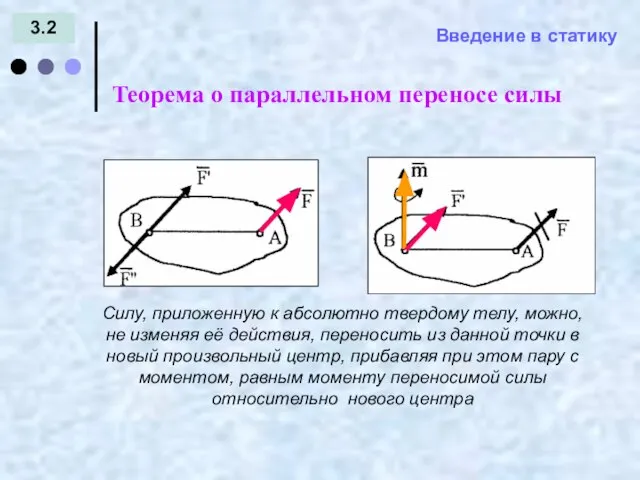
Теорема о параллельном переносе силы
= -
Силу, приложенную к абсолютно
Введение в статику
3.2
Теорема о параллельном переносе силы
= -
Силу, приложенную к абсолютно
Слайд 24Введение в статику
3.3
Приведение системы сил к центру
= -
.
Введение в статику
3.3
Приведение системы сил к центру
= -
.

Слайд 25Введение в статику
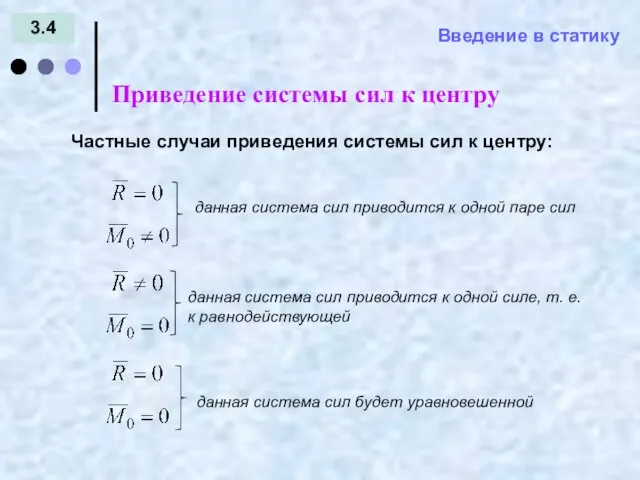
3.4
= -
Частные случаи приведения системы сил к центру:
Приведение
Введение в статику
3.4
= -
Частные случаи приведения системы сил к центру:
Приведение
Слайд 26ЛЕКЦИЯ 4 План:
4.1
МЕХАНИКА
4.1. Теорема Вариньона.
4.2. Условия равновесия различных систем сил.
СТАТИКА
ЛЕКЦИЯ 4 План:
4.1
МЕХАНИКА
4.1. Теорема Вариньона.
4.2. Условия равновесия различных систем сил.
СТАТИКА
Слайд 274.2
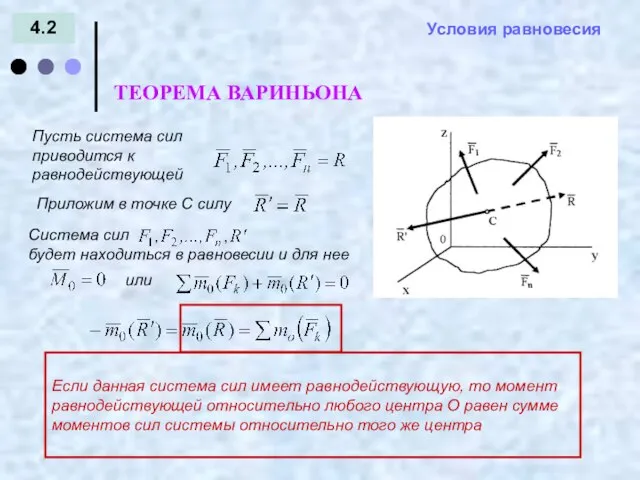
ТЕОРЕМА ВАРИНЬОНА
Пусть система сил приводится к равнодействующей
Если данная система сил имеет равнодействующую,
4.2
ТЕОРЕМА ВАРИНЬОНА
Пусть система сил приводится к равнодействующей
Если данная система сил имеет равнодействующую,
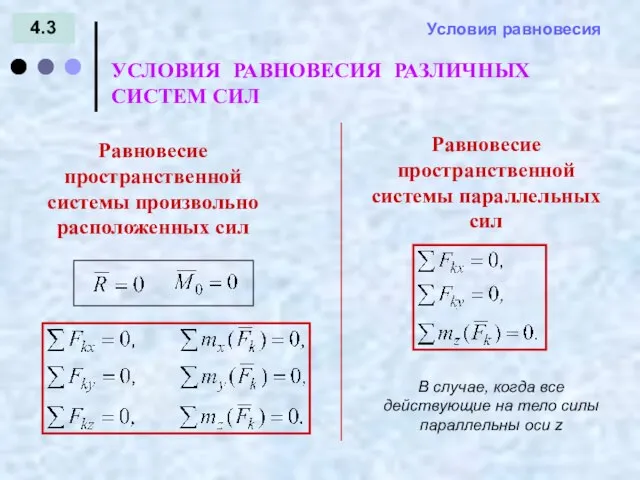
Слайд 284.3
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
Равновесие пространственной системы произвольно расположенных сил
Условия
4.3
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
Равновесие пространственной системы произвольно расположенных сил
Условия
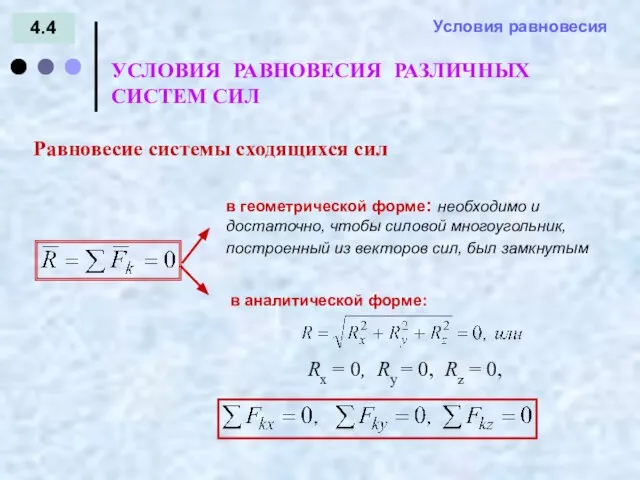
Слайд 294.4
Условия равновесия
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
Равновесие системы сходящихся сил
в
4.4
Условия равновесия
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
Равновесие системы сходящихся сил
в
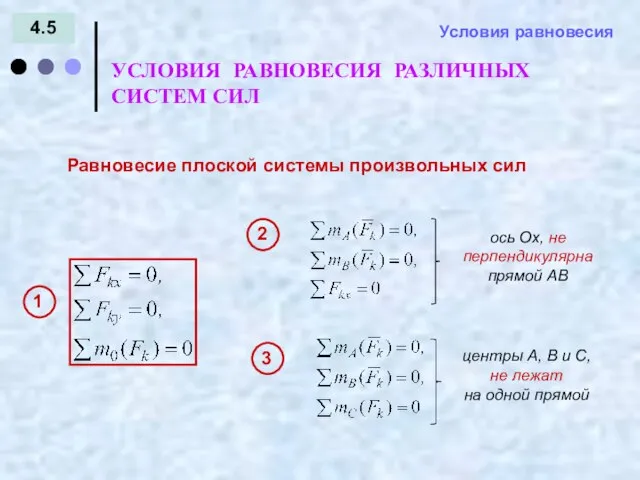
Слайд 304.5
Условия равновесия
Равновесие плоской системы произвольных сил
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
4.5
Условия равновесия
Равновесие плоской системы произвольных сил
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
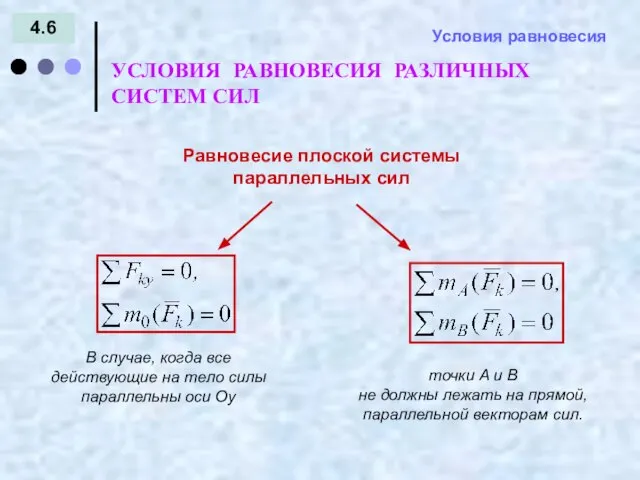
Слайд 314.6
Условия равновесия
Равновесие плоской системы параллельных сил
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
точки
4.6
Условия равновесия
Равновесие плоской системы параллельных сил
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
точки
Слайд 32ЛЕКЦИЯ 5 План:
5.1
МЕХАНИКА
5.1. Равновесие систем тел.
5.2. Равновесие тела при наличии трения
СТАТИКА
ЛЕКЦИЯ 5 План:
5.1
МЕХАНИКА
5.1. Равновесие систем тел.
5.2. Равновесие тела при наличии трения
СТАТИКА
Слайд 335.2
РАВНОВЕСИЕ СИСТЕМ ТЕЛ
Условия равновесия
Внутренние связи – это связи, соединяющие части конструкции
Два способа
5.2
РАВНОВЕСИЕ СИСТЕМ ТЕЛ
Условия равновесия
Внутренние связи – это связи, соединяющие части конструкции
Два способа
Слайд 345.3
РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
= -
Условия равновесия
Сцепление и трение скольжения
Условие
5.3
РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
= -
Условия равновесия
Сцепление и трение скольжения
Условие
Слайд 355.4
= -
Условия равновесия
Трение качения
РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
QПР = (δ
5.4
= -
Условия равновесия
Трение качения
РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
QПР = (δ
Слайд 36ЛЕКЦИЯ 5 План:
6.1
МЕХАНИКА
6.1. Центр параллельных сил
6.2. Центр тяжести твердого тела
СТАТИКА
Модуль
ЛЕКЦИЯ 5 План:
6.1
МЕХАНИКА
6.1. Центр параллельных сил
6.2. Центр тяжести твердого тела
СТАТИКА
Модуль
Слайд 376.2
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
= -
ЦЕНТР ТЯЖЕСТИ
Координаты центра параллельных сил:
6.2
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
= -
ЦЕНТР ТЯЖЕСТИ
Координаты центра параллельных сил:
Слайд 386.3
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
= -
ЦЕНТР ТЯЖЕСТИ
Силовое поле – это область,
6.3
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
= -
ЦЕНТР ТЯЖЕСТИ
Силовое поле – это область,
Слайд 396.4
= -
ЦЕНТР ТЯЖЕСТИ
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
6.4
= -
ЦЕНТР ТЯЖЕСТИ
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
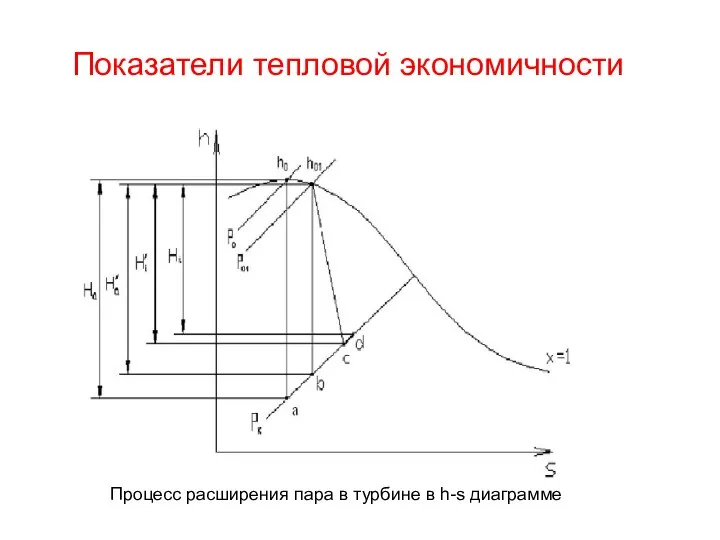 Показатели тепловой экономичности
Показатели тепловой экономичности Отсчёт по производственной практике
Отсчёт по производственной практике Презентация ЛЕКЦИЯ №11.0 колебания
Презентация ЛЕКЦИЯ №11.0 колебания Применение конденсаторов
Применение конденсаторов Презентация на тему Механические явления в природе
Презентация на тему Механические явления в природе  Основные положения МКТ
Основные положения МКТ Электрохимические системы
Электрохимические системы Положение и движение точки в пространстве
Положение и движение точки в пространстве Проводники и диэлектрики в электрическом поле. Решение задач
Проводники и диэлектрики в электрическом поле. Решение задач Действие жидкости и газа на погружённое в них тело. Урок физики в 7 классе
Действие жидкости и газа на погружённое в них тело. Урок физики в 7 классе Расчет размерных цепей
Расчет размерных цепей Презентация на тему Атмосфера и атмосферное давление (7 класс)
Презентация на тему Атмосфера и атмосферное давление (7 класс)  Лазер, устройство лазера
Лазер, устройство лазера Магнитные материалы. Гистерезис. Применение ферромагнитных материалов
Магнитные материалы. Гистерезис. Применение ферромагнитных материалов Измерение физических величин. 7 класс
Измерение физических величин. 7 класс Температура. Тепловое равновесие
Температура. Тепловое равновесие Ремонт электрических машин всех типов
Ремонт электрических машин всех типов Аттосекундная регистрация динамики фотоионизации атомов
Аттосекундная регистрация динамики фотоионизации атомов Элементарные частицы
Элементарные частицы Взаимодействие рентгеновского излучения с веществом
Взаимодействие рентгеновского излучения с веществом Динамика и устойчивость сооружений
Динамика и устойчивость сооружений Презентация на тему Электрический ток
Презентация на тему Электрический ток  Измеряем длину взвешиванием
Измеряем длину взвешиванием Физика в медицине. Элективный курс предпрофильной подготовки обучающихся 9-х классов
Физика в медицине. Элективный курс предпрофильной подготовки обучающихся 9-х классов Влияние геометрической формы проводника спирали на электродинамические характеристики спиральной замедляющей системы
Влияние геометрической формы проводника спирали на электродинамические характеристики спиральной замедляющей системы ИК-спектроскопия
ИК-спектроскопия Восстановление долот PDC
Восстановление долот PDC Зубчатые передачи
Зубчатые передачи