- Теория гироскопов

Содержание
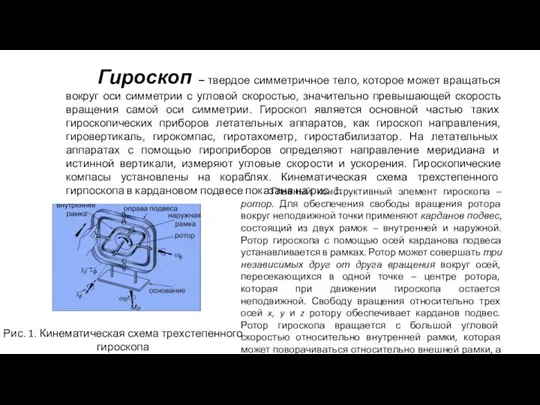
- 2. Гироскоп – твердое симметричное тело, которое может вращаться вокруг оси симметрии с угловой скоростью, значительно превышающей
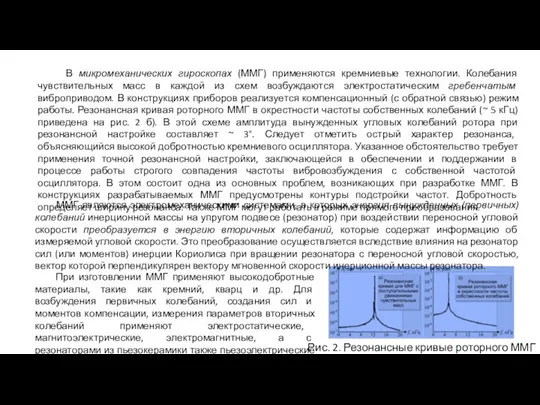
- 3. В микромеханических гироскопах (ММГ) применяются кремниевые технологии. Колебания чувствительных масс в каждой из схем возбуждаются электростатическим
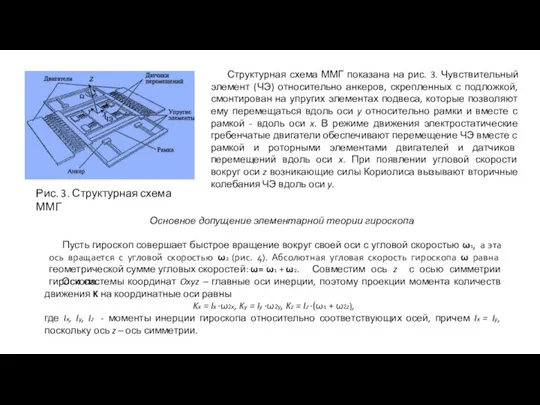
- 4. Рис. 3. Структурная схема ММГ Структурная схема ММГ показана на рис. 3. Чувствительный элемент (ЧЭ) относительно
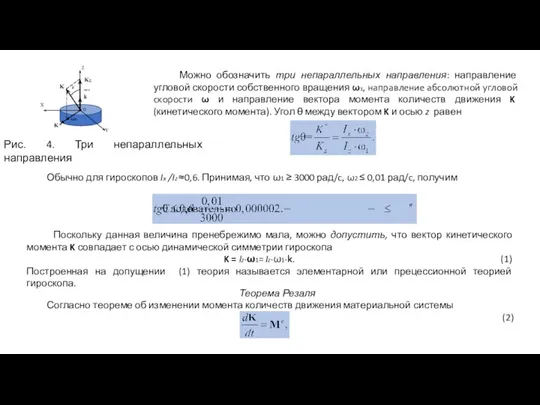
- 5. Рис. 4. Три непараллельных направления Можно обозначить три непараллельных направления: направление угловой скорости собственного вращения ω1,
- 6. где Me – главный момент всех внешних сил, приложенных к системе, относительно центра (неподвижной точки О).
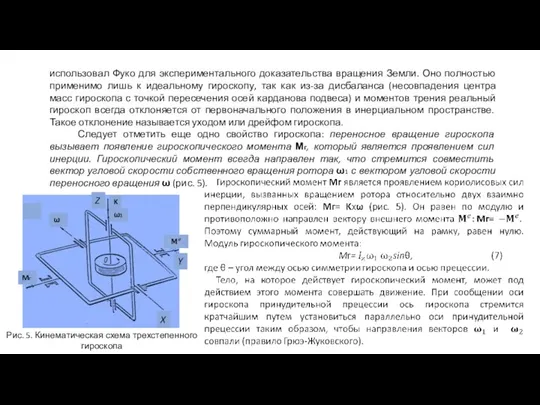
- 9. использовал Фуко для экспериментального доказательства вращения Земли. Оно полностью применимо лишь к идеальному гироскопу, так как
- 11. Скачать презентацию
Слайд 3 В микромеханических гироскопах (ММГ) применяются кремниевые технологии. Колебания чувствительных масс в
В микромеханических гироскопах (ММГ) применяются кремниевые технологии. Колебания чувствительных масс в
Слайд 4Рис. 3. Структурная схема ММГ
Структурная схема ММГ показана на рис.
Рис. 3. Структурная схема ММГ
Структурная схема ММГ показана на рис.
Слайд 5Рис. 4. Три непараллельных направления
Можно обозначить три непараллельных направления: направление
Рис. 4. Три непараллельных направления
Можно обозначить три непараллельных направления: направление
Слайд 6где Me – главный момент всех внешних сил, приложенных к системе, относительно
где Me – главный момент всех внешних сил, приложенных к системе, относительно

Слайд 9использовал Фуко для экспериментального доказательства вращения Земли. Оно полностью применимо лишь к
использовал Фуко для экспериментального доказательства вращения Земли. Оно полностью применимо лишь к
 Замена радиатора на системе охлаждения для марки ВАЗ 2107
Замена радиатора на системе охлаждения для марки ВАЗ 2107 Izmerenie_temperatury
Izmerenie_temperatury Кипение. Загадки процесса кипения
Кипение. Загадки процесса кипения Физические явления. Химические реакции
Физические явления. Химические реакции Электрический ток в газах
Электрический ток в газах Дифференцирующие и интегрирующие цепи
Дифференцирующие и интегрирующие цепи Указатель уровня топлива
Указатель уровня топлива Использование данных лазерного сканирования для мониторинга состояния ВПП аэропорта
Использование данных лазерного сканирования для мониторинга состояния ВПП аэропорта Общее устройство автомобиля
Общее устройство автомобиля Решение задач. Силы тяжести, упругости
Решение задач. Силы тяжести, упругости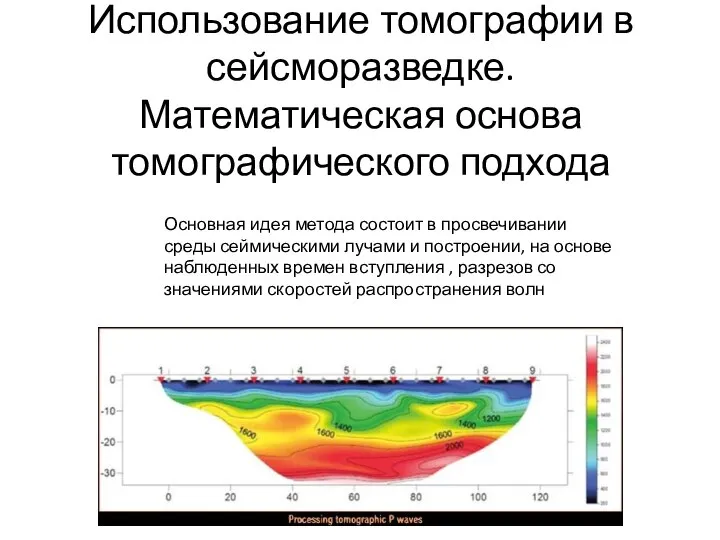 Использование томографии в сейсморазведке. Математическая основа томографического подхода
Использование томографии в сейсморазведке. Математическая основа томографического подхода Презентация на тему Закон сохранения энергии
Презентация на тему Закон сохранения энергии  Закон всемирного тяготения
Закон всемирного тяготения Уравнение теплового баланса
Уравнение теплового баланса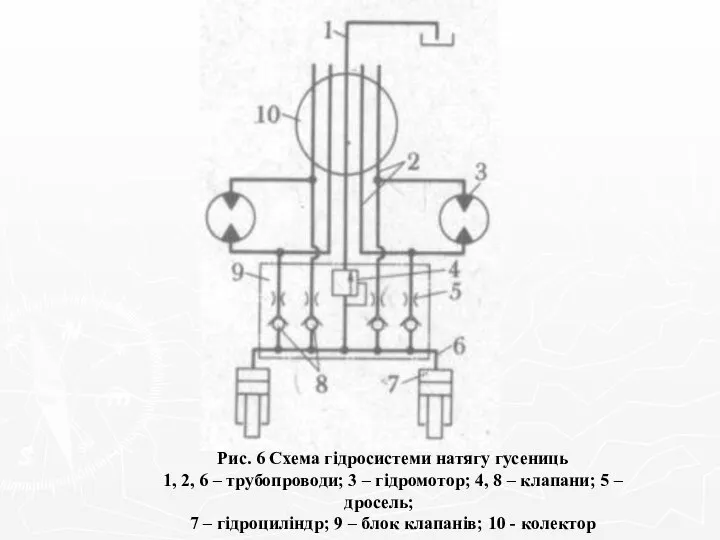 Схема гідросистеми натягу гусениць
Схема гідросистеми натягу гусениць Понятие механики. Механическое движение. Связь механики с другими науками. Достижения в области механики
Понятие механики. Механическое движение. Связь механики с другими науками. Достижения в области механики Действие магнитного поля на проводник с током
Действие магнитного поля на проводник с током Радиоактивные превращения атомных ядер
Радиоактивные превращения атомных ядер Стихотворение Ученье - свет, а не ученье - тьма
Стихотворение Ученье - свет, а не ученье - тьма Презентация на тему Атмосфера Земли. Атмосферное давление
Презентация на тему Атмосфера Земли. Атмосферное давление 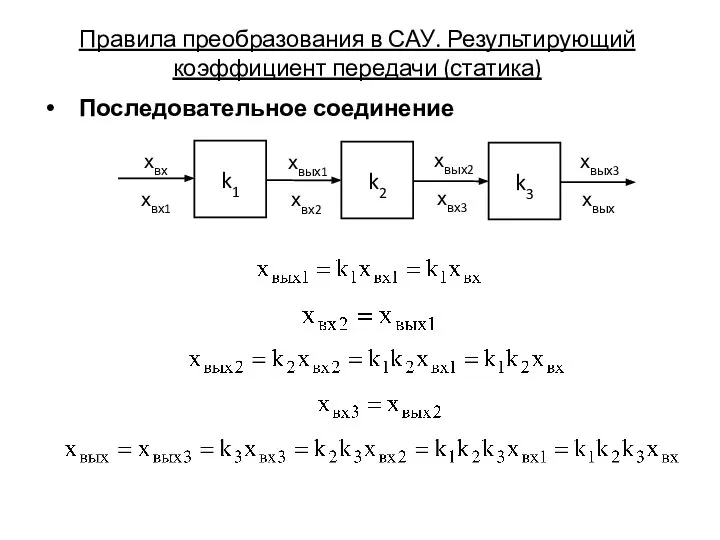 Правила преобразования в САУ. Результирующий коэффициент передачи (статика)
Правила преобразования в САУ. Результирующий коэффициент передачи (статика) Презентация OpenDocument
Презентация OpenDocument T-S диаграмма
T-S диаграмма Электромагнитная индукция
Электромагнитная индукция Методы определения твердости
Методы определения твердости Звуковые волны
Звуковые волны Полупроводники
Полупроводники Резистор. Функциональное назначение резистра
Резистор. Функциональное назначение резистра