- Тягач. Коробка передач

Содержание
- 2. Вспомним: Если ведущее колесо больше ведомого, то передача называется: Что происходит со скоростью? Что происходит с
- 3. Если ведущее колесо меньше ведомого, то передача называется: ПОНИЖАЮЩЕЙ Вспомним: Что происходит со скоростью? Что происходит
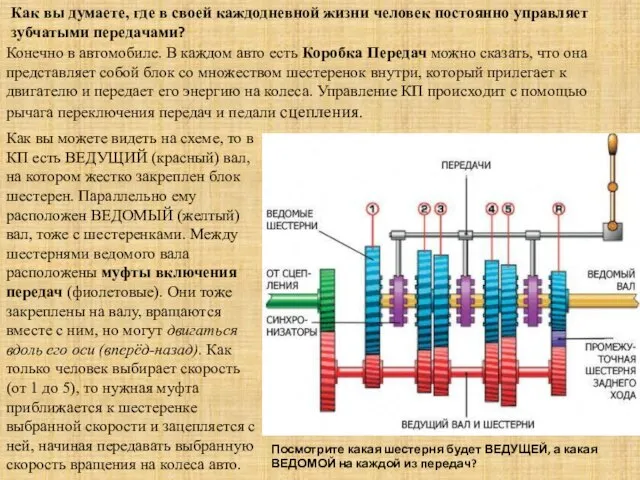
- 4. Как вы думаете, где в своей каждодневной жизни человек постоянно управляет зубчатыми передачами? Конечно в автомобиле.
- 5. Конечно, устройство коробки передач более сложное. Нам с вами необходимо было лишь рассмотреть принцип ее работы.
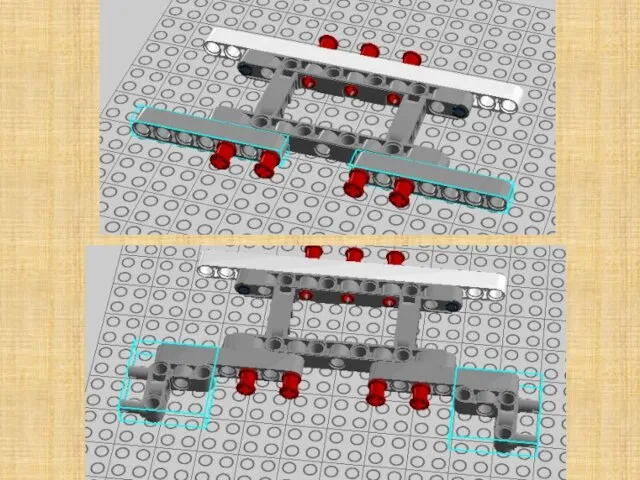
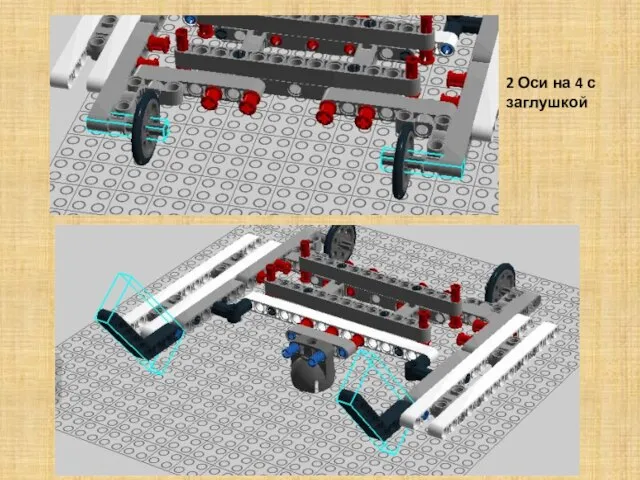
- 14. 2 Оси на 4 с заглушкой
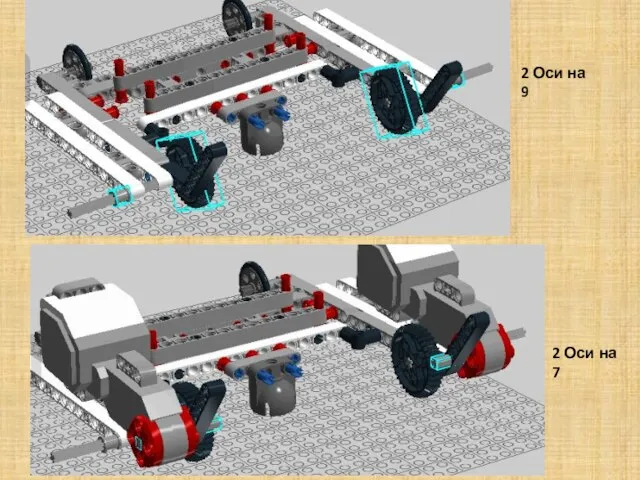
- 15. 2 Оси на 9 2 Оси на 7
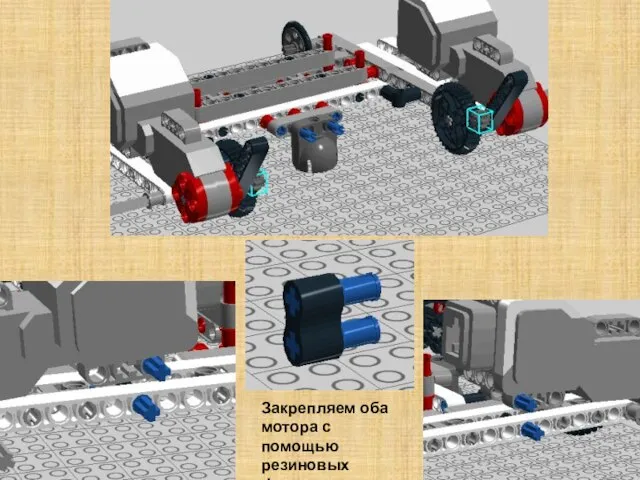
- 16. Закрепляем оба мотора с помощью резиновых фиксаторов
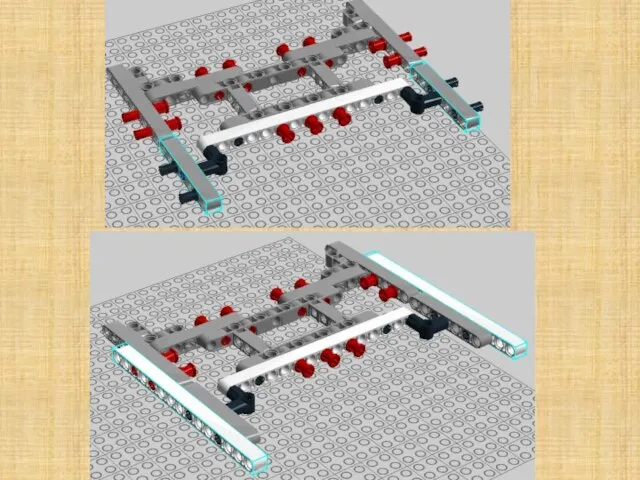
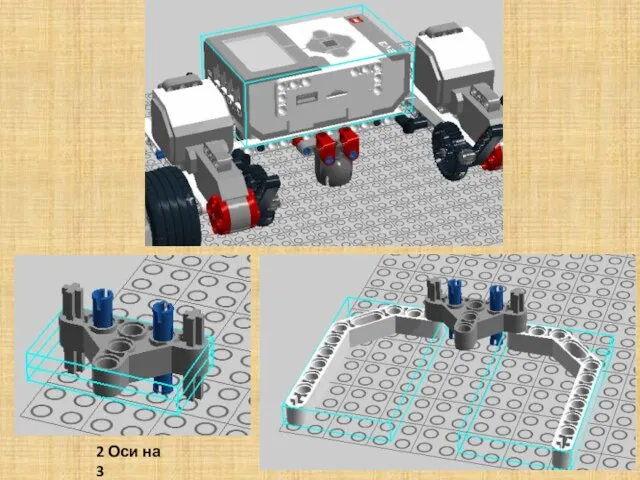
- 18. 2 Оси на 3
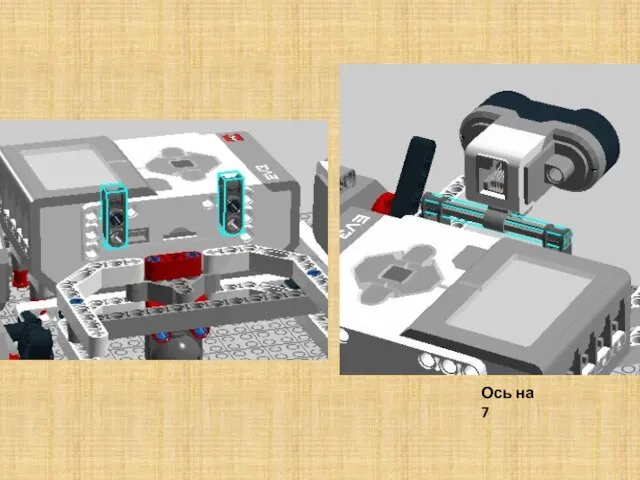
- 20. Ось на 7
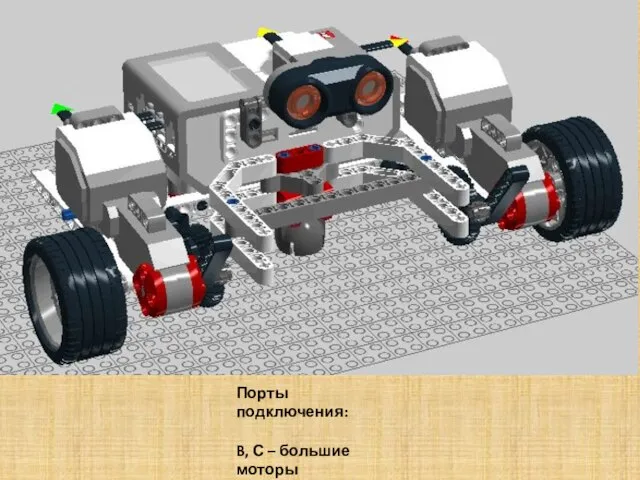
- 21. Порты подключения: B, С – большие моторы 4 – УЗ датчик
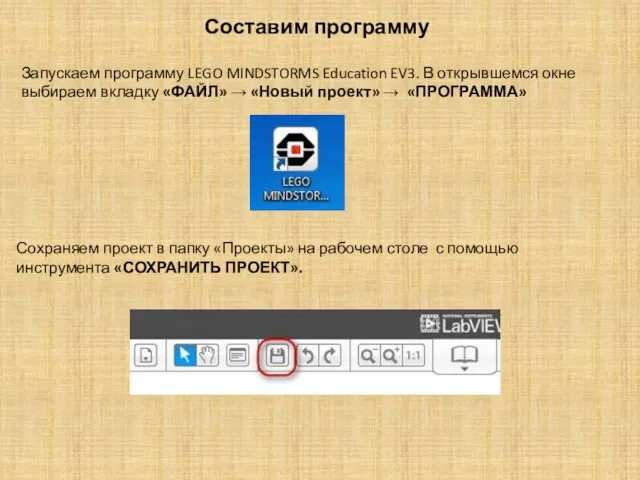
- 22. Запускаем программу LEGO MINDSTORMS Education EV3. В открывшемся окне выбираем вкладку «ФАЙЛ» → «Новый проект» →
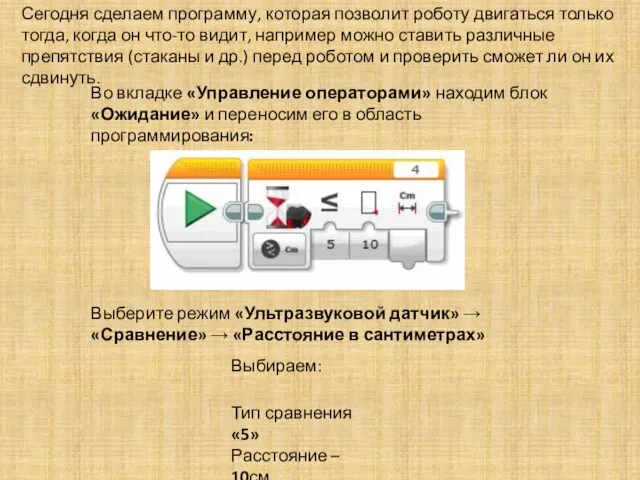
- 23. Во вкладке «Управление операторами» находим блок «Ожидание» и переносим его в область программирования: Выберите режим «Ультразвуковой
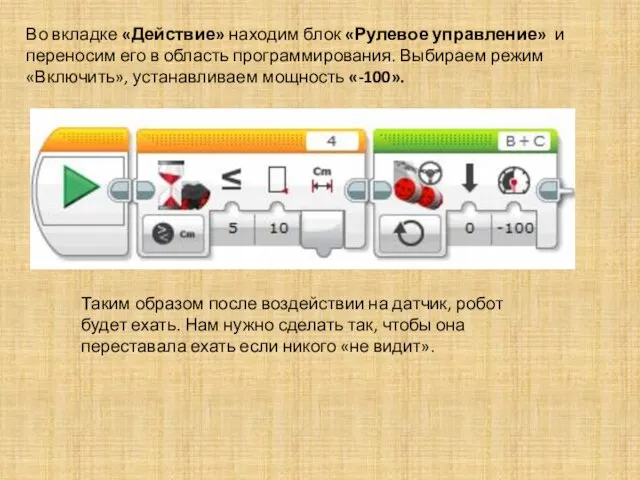
- 24. Во вкладке «Действие» находим блок «Рулевое управление» и переносим его в область программирования. Выбираем режим «Включить»,
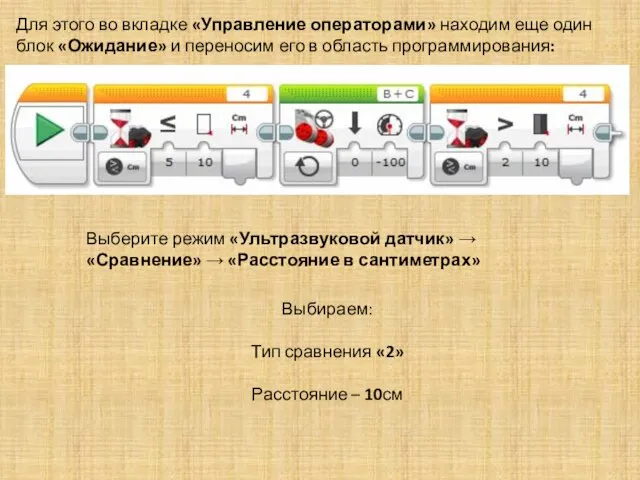
- 25. Для этого во вкладке «Управление операторами» находим еще один блок «Ожидание» и переносим его в область
- 27. Скачать презентацию
Слайд 2Вспомним:
Если ведущее колесо больше ведомого, то передача называется:
Что происходит со скоростью?
Что происходит
Вспомним:
Если ведущее колесо больше ведомого, то передача называется:
Что происходит со скоростью?
Что происходит

Слайд 3Если ведущее колесо меньше ведомого, то передача называется:
ПОНИЖАЮЩЕЙ
Вспомним:
Что происходит со скоростью?
Что происходит
Если ведущее колесо меньше ведомого, то передача называется:
ПОНИЖАЮЩЕЙ
Вспомним:
Что происходит со скоростью?
Что происходит

Слайд 4Как вы думаете, где в своей каждодневной жизни человек постоянно управляет зубчатыми
Как вы думаете, где в своей каждодневной жизни человек постоянно управляет зубчатыми
Слайд 5Конечно, устройство коробки передач более сложное. Нам с вами необходимо было лишь
Конечно, устройство коробки передач более сложное. Нам с вами необходимо было лишь



Слайд 142 Оси на 4 с заглушкой
2 Оси на 4 с заглушкой
Слайд 152 Оси на 9
2 Оси на 7
2 Оси на 9
2 Оси на 7
Слайд 16Закрепляем оба мотора с помощью резиновых фиксаторов
Закрепляем оба мотора с помощью резиновых фиксаторов
Слайд 182 Оси на 3
2 Оси на 3

Слайд 20Ось на 7
Ось на 7
Слайд 21Порты подключения:
B, С – большие моторы
4 – УЗ датчик
Порты подключения:
B, С – большие моторы
4 – УЗ датчик
Слайд 22Запускаем программу LEGO MINDSTORMS Education EV3. В открывшемся окне выбираем вкладку «ФАЙЛ»
Запускаем программу LEGO MINDSTORMS Education EV3. В открывшемся окне выбираем вкладку «ФАЙЛ»
Слайд 23Во вкладке «Управление операторами» находим блок «Ожидание» и переносим его в область
Во вкладке «Управление операторами» находим блок «Ожидание» и переносим его в область
Слайд 24Во вкладке «Действие» находим блок «Рулевое управление» и переносим его в область
Во вкладке «Действие» находим блок «Рулевое управление» и переносим его в область
Слайд 25Для этого во вкладке «Управление операторами» находим еще один блок «Ожидание» и
Для этого во вкладке «Управление операторами» находим еще один блок «Ожидание» и
 Применение правила равновесия рычага к блоку. Золотое правило механики
Применение правила равновесия рычага к блоку. Золотое правило механики Презентация на тему Вычисление массы и объёма тела по его плотности
Презентация на тему Вычисление массы и объёма тела по его плотности  Валерий Брюсов “Мир электрона”. (1922г)
Валерий Брюсов “Мир электрона”. (1922г) Презентация на тему Электрический ток в различных средах
Презентация на тему Электрический ток в различных средах 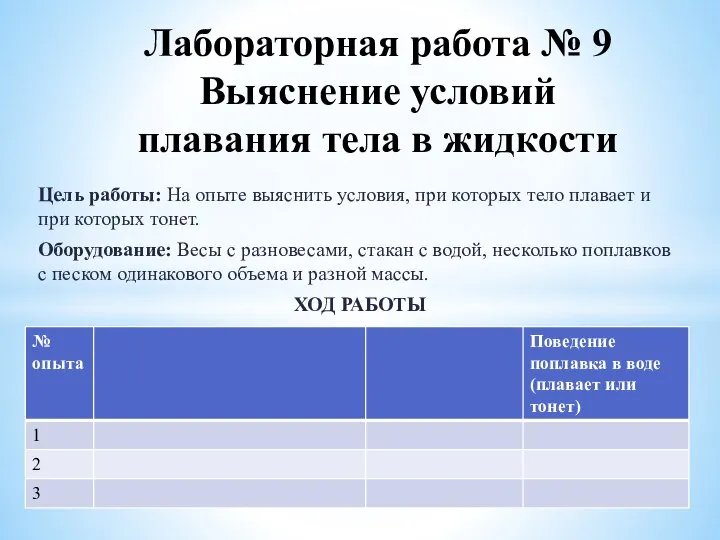 Условия, при которых тело плавает и при которых тонет
Условия, при которых тело плавает и при которых тонет Свойства волн. Тест 11
Свойства волн. Тест 11 Геометрическая оптика. Линзы
Геометрическая оптика. Линзы Урок 8. Тела, вещества, частицы
Урок 8. Тела, вещества, частицы Применение последовательного анализа и правила Вальда в задачах контроля
Применение последовательного анализа и правила Вальда в задачах контроля Электростатика
Электростатика Силы гравитации
Силы гравитации Равноускоренное прямолинейное движение
Равноускоренное прямолинейное движение Дисперсия световых волн
Дисперсия световых волн Способы измерения размеров малых тел
Способы измерения размеров малых тел Законы сохранения в механике
Законы сохранения в механике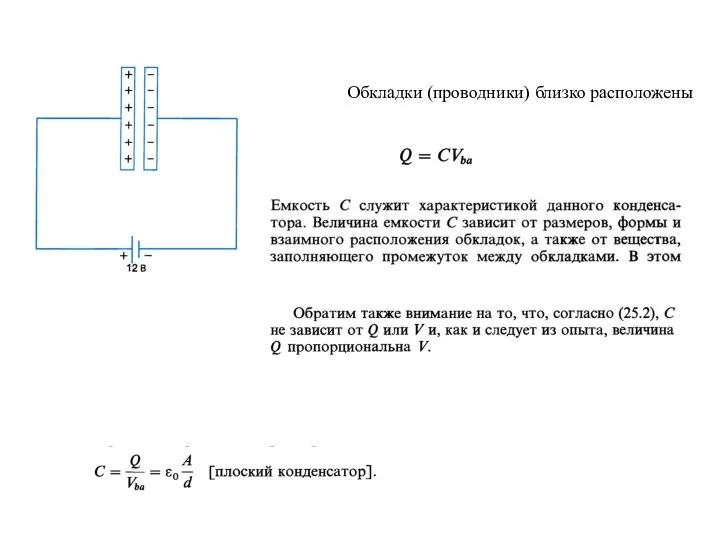 Электричество. Решение задач
Электричество. Решение задач Равномерное движение по окружности
Равномерное движение по окружности Построение зубчатого зацепления вручную карандашом
Построение зубчатого зацепления вручную карандашом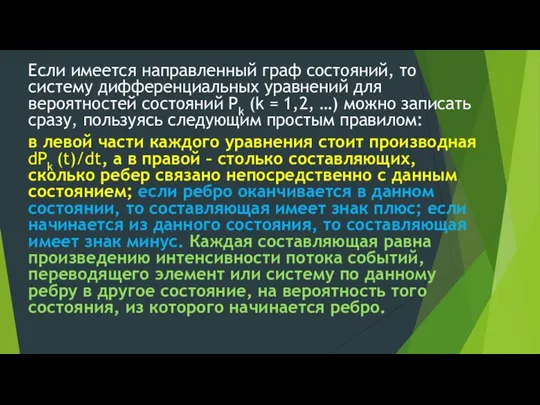 Марковские процессы. Правило
Марковские процессы. Правило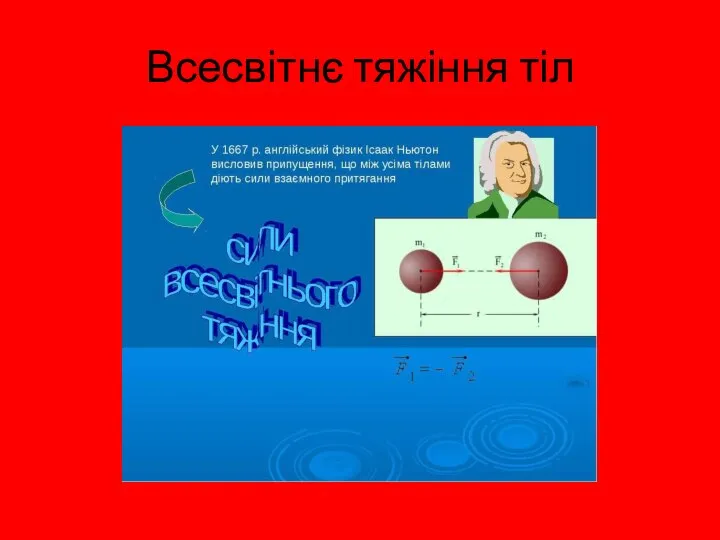 Всесвітнє тяжіння тіл
Всесвітнє тяжіння тіл Электромагнитные колебания. Колебательный контур. Превращения энергии в колебательном контуре
Электромагнитные колебания. Колебательный контур. Превращения энергии в колебательном контуре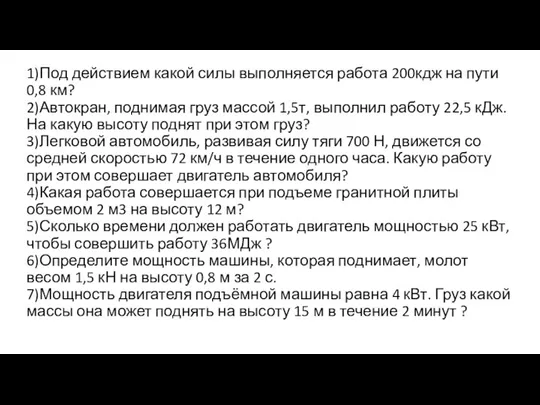 Работа, мощность и энергия. Задачи
Работа, мощность и энергия. Задачи Шаговое напряжение
Шаговое напряжение Исследование эффекта Талбота с использованием компьютерных модулей
Исследование эффекта Талбота с использованием компьютерных модулей Архимедова сила. 7 класс
Архимедова сила. 7 класс Механические передачи
Механические передачи Воздухоплавание
Воздухоплавание Явление механического резонанса
Явление механического резонанса