- Аппаратные средства систем управления ЭТУС

Содержание
- 3. Автоматизированная система управления технологическим процессом Автоматизированная система управления технологическим процессом (АСУ ТП) – представляет ссобой человеко-машинную
- 4. Локальная АСУ Локальная система управления используется для управления технологически независимым объектом с компактно расположенным оборудованием, и
- 5. Централизованная АСУ Централизованная система управления используется для управления сосредоточенным объектом со сложными или разнообразными функциями управления
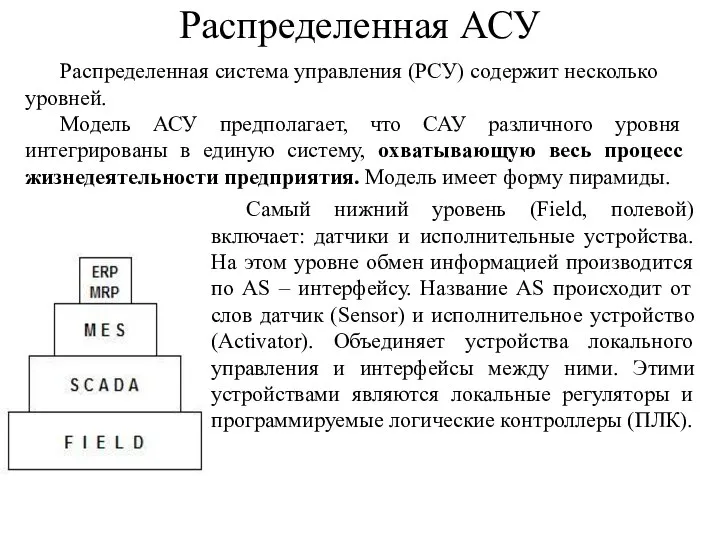
- 6. Распределенная АСУ Распределенная система управления (РСУ) содержит несколько уровней. Модель АСУ предполагает, что САУ различного уровня
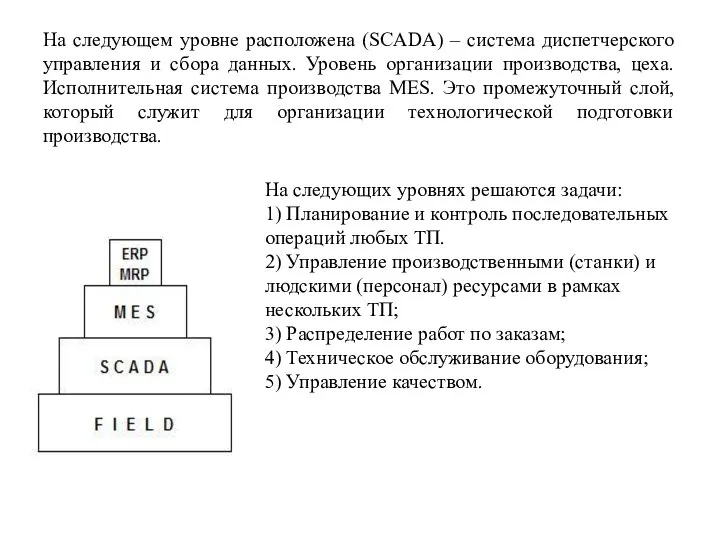
- 7. На следующем уровне расположена (SCADA) – система диспетчерского управления и сбора данных. Уровень организации производства, цеха.
- 8. ПРОМЫШЛЕННЫЕ КОНТРОЛЛЕРЫ Слово "контроллер" произошло от английского " control" (управление), а не от русского "контроль" (учет,
- 9. 8-разрядные 8-разрядные микроконтроллеры имеют относительно низкую производительность, которая вполне достаточна для решения широкого круга задач управления
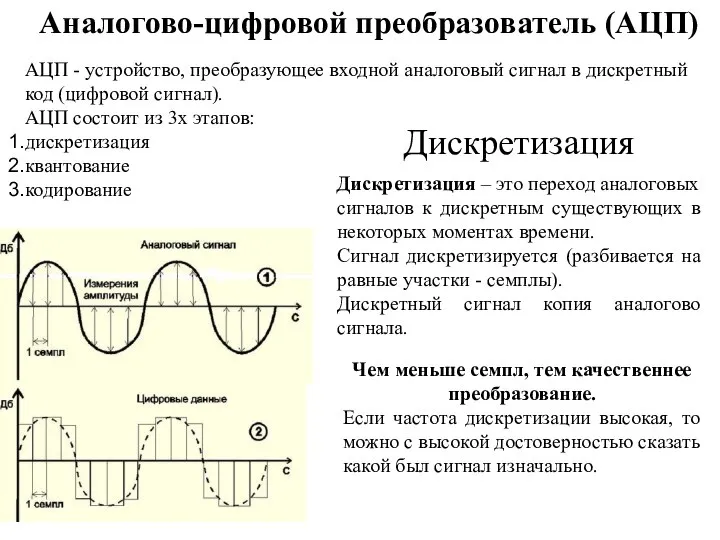
- 10. Аналогово-цифровой преобразователь (АЦП) АЦП - устройство, преобразующее входной аналоговый сигнал в дискретный код (цифровой сигнал). АЦП
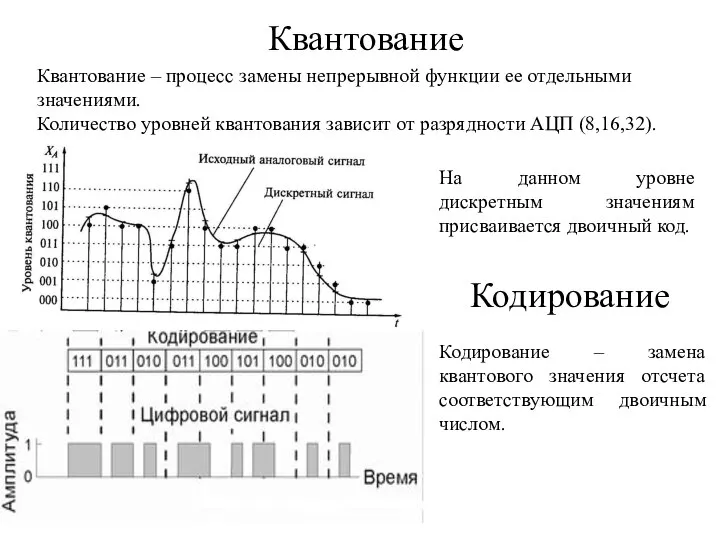
- 11. Квантование Квантование – процесс замены непрерывной функции ее отдельными значениями. Количество уровней квантования зависит от разрядности
- 12. Исполнительные механизмы 1. пневматические 2. гидравлические 3. электрические
- 13. Гидравлические исполнительные механизмы Гидравлические исполнительные механизмы обычно используются в случаях, требующих приложения больших усилий для перемещения
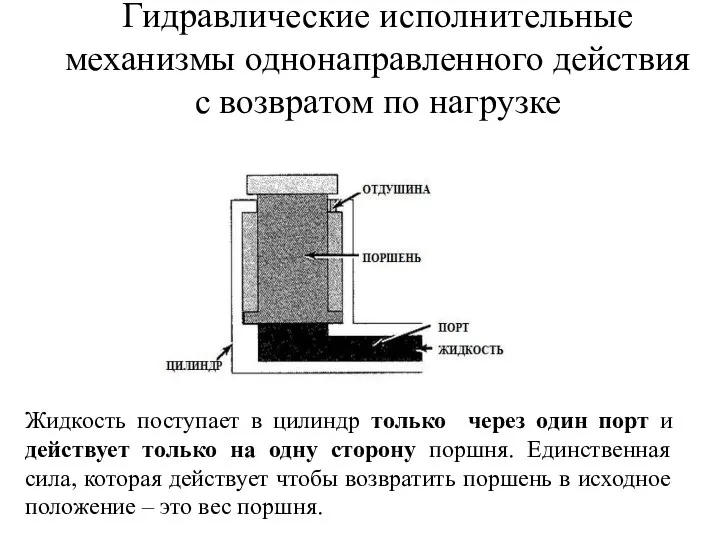
- 14. Гидравлические исполнительные механизмы однонаправленного действия с возвратом по нагрузке Жидкость поступает в цилиндр только через один
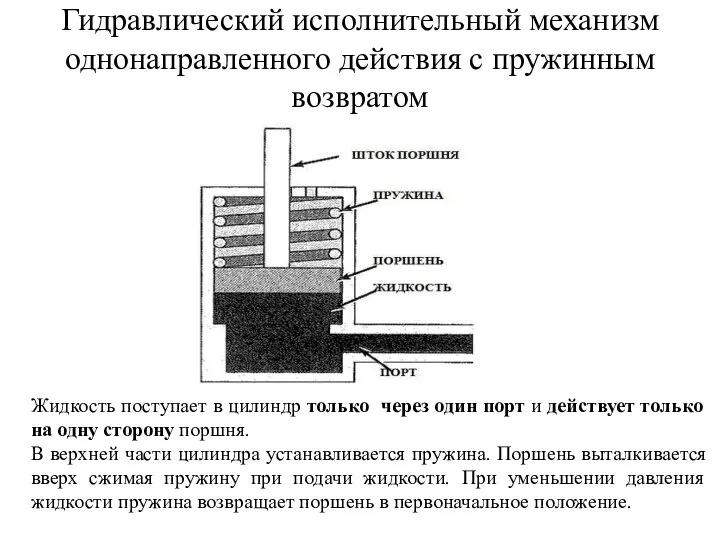
- 15. Гидравлический исполнительный механизм однонаправленного действия с пружинным возвратом Жидкость поступает в цилиндр только через один порт
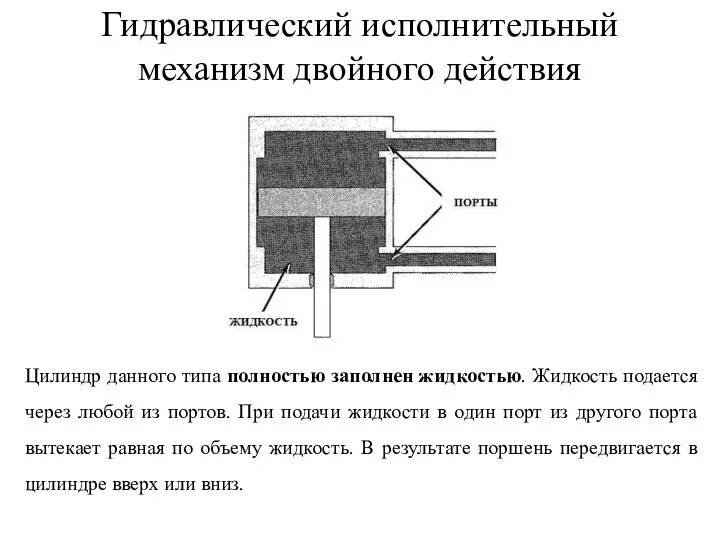
- 16. Гидравлический исполнительный механизм двойного действия Цилиндр данного типа полностью заполнен жидкостью. Жидкость подается через любой из
- 17. Пневматические исполнительные механизмы Движение, вырабатываемое пневматическим исполнительным механизмом может быть использовано, например, для выбора положения вентиля,
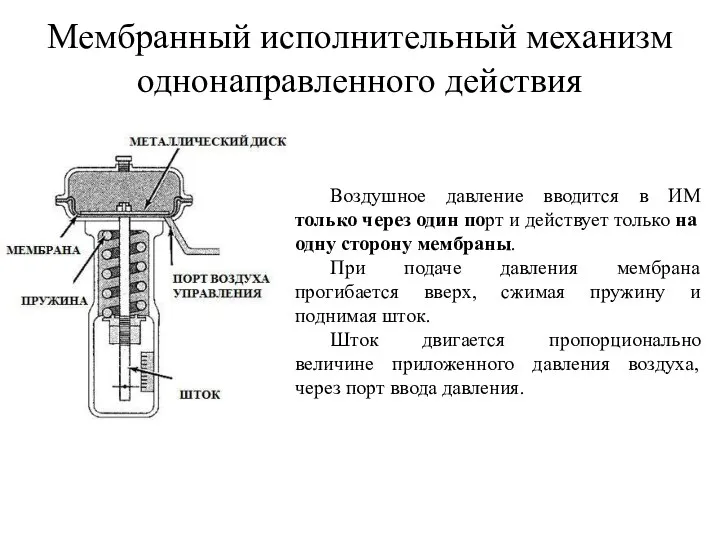
- 18. Мембранный исполнительный механизм однонаправленного действия Воздушное давление вводится в ИМ только через один порт и действует
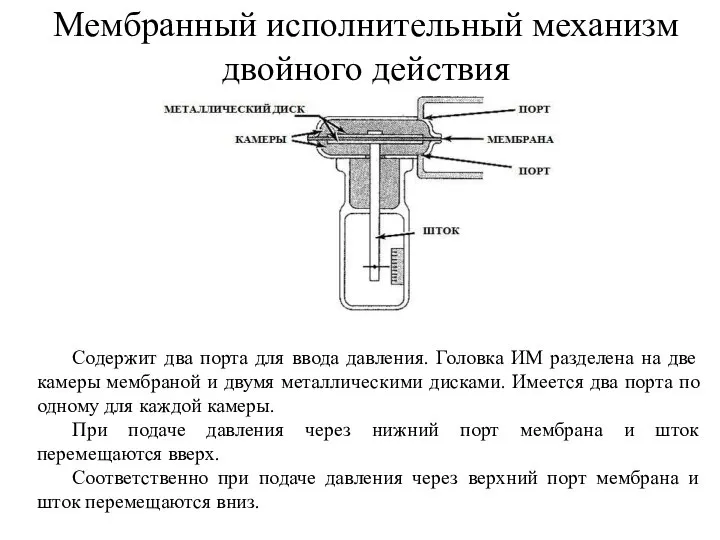
- 19. Мембранный исполнительный механизм двойного действия Содержит два порта для ввода давления. Головка ИМ разделена на две
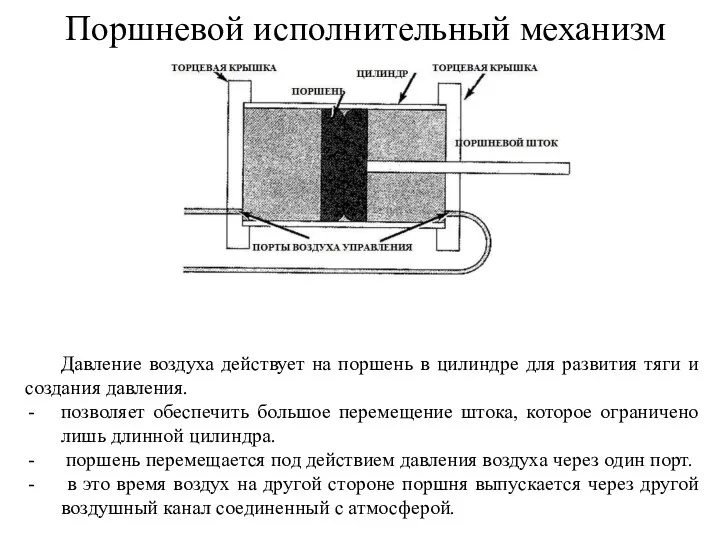
- 20. Поршневой исполнительный механизм Давление воздуха действует на поршень в цилиндре для развития тяги и создания давления.
- 21. Электрические исполнительные механизмы Электрические исполнительные механизмы применяются в случаях, когда требуются небольшие усилия для перемещения регулирующего
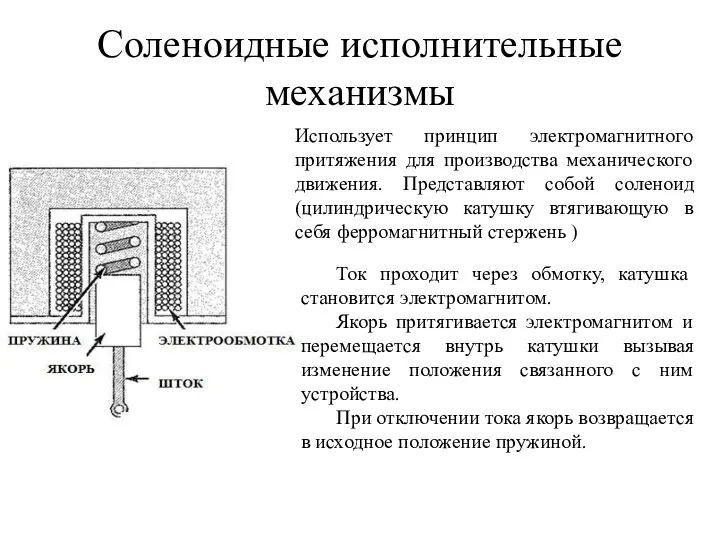
- 22. Соленоидные исполнительные механизмы Использует принцип электромагнитного притяжения для производства механического движения. Представляют собой соленоид (цилиндрическую катушку
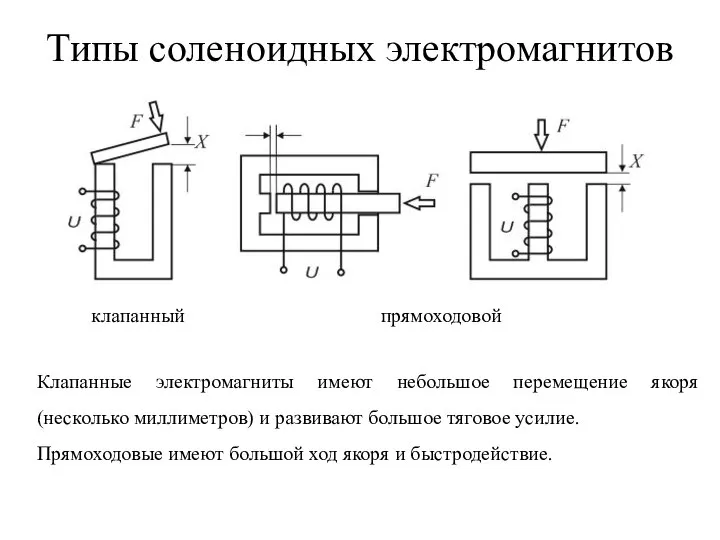
- 23. Типы соленоидных электромагнитов клапанный прямоходовой Клапанные электромагниты имеют небольшое перемещение якоря (несколько миллиметров) и развивают большое
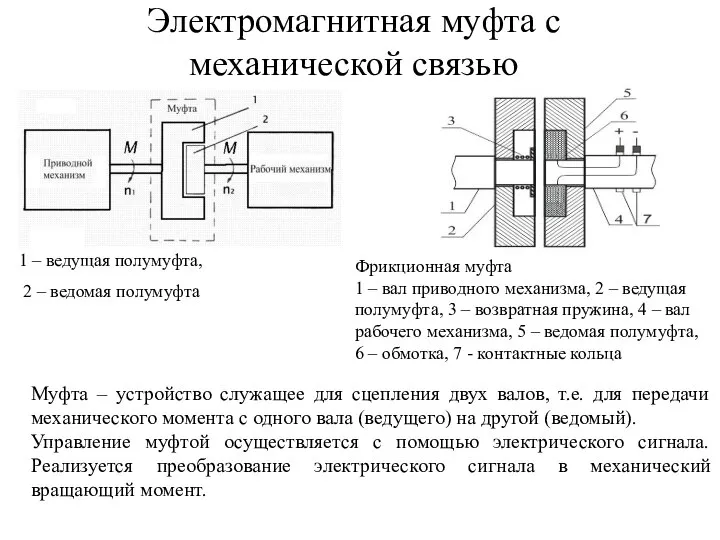
- 24. Электромагнитная муфта с механической связью 1 – ведущая полумуфта, 2 – ведомая полумуфта Муфта – устройство
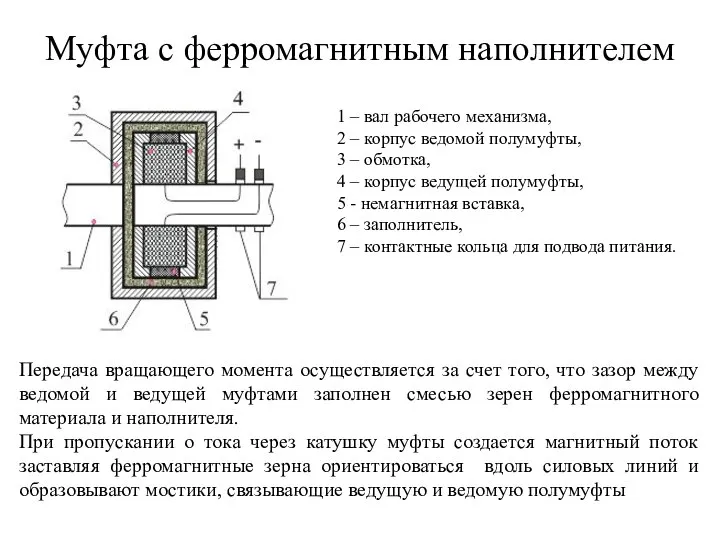
- 25. Муфта с ферромагнитным наполнителем 1 – вал рабочего механизма, 2 – корпус ведомой полумуфты, 3 –
- 27. Скачать презентацию

Слайд 3Автоматизированная система управления технологическим процессом
Автоматизированная система управления технологическим процессом (АСУ ТП) –
Автоматизированная система управления технологическим процессом
Автоматизированная система управления технологическим процессом (АСУ ТП) –
Слайд 4Локальная АСУ
Локальная система управления используется для управления технологически независимым объектом с компактно
Локальная АСУ
Локальная система управления используется для управления технологически независимым объектом с компактно
Слайд 5Централизованная АСУ
Централизованная система управления используется для управления сосредоточенным объектом со сложными или
Централизованная АСУ
Централизованная система управления используется для управления сосредоточенным объектом со сложными или
Слайд 6Распределенная АСУ
Распределенная система управления (РСУ) содержит несколько уровней.
Модель АСУ предполагает, что
Распределенная АСУ
Распределенная система управления (РСУ) содержит несколько уровней.
Модель АСУ предполагает, что
Слайд 7На следующем уровне расположена (SCADA) – система диспетчерского управления и сбора данных.
На следующем уровне расположена (SCADA) – система диспетчерского управления и сбора данных.
Слайд 8ПРОМЫШЛЕННЫЕ КОНТРОЛЛЕРЫ
Слово "контроллер" произошло от английского " control" (управление), а не от
ПРОМЫШЛЕННЫЕ КОНТРОЛЛЕРЫ
Слово "контроллер" произошло от английского " control" (управление), а не от
Слайд 98-разрядные
8-разрядные микроконтроллеры имеют относительно низкую производительность, которая вполне достаточна для решения широкого
8-разрядные
8-разрядные микроконтроллеры имеют относительно низкую производительность, которая вполне достаточна для решения широкого
Слайд 10Аналогово-цифровой преобразователь (АЦП)
АЦП - устройство, преобразующее входной аналоговый сигнал в дискретный код
Аналогово-цифровой преобразователь (АЦП)
АЦП - устройство, преобразующее входной аналоговый сигнал в дискретный код
Слайд 11Квантование
Квантование – процесс замены непрерывной функции ее отдельными значениями.
Количество уровней квантования зависит
Квантование
Квантование – процесс замены непрерывной функции ее отдельными значениями.
Количество уровней квантования зависит
Слайд 12Исполнительные механизмы
1. пневматические
2. гидравлические
3. электрические
Исполнительные механизмы
1. пневматические
2. гидравлические
3. электрические
Слайд 13Гидравлические исполнительные механизмы
Гидравлические исполнительные механизмы обычно используются в случаях, требующих приложения больших
Гидравлические исполнительные механизмы
Гидравлические исполнительные механизмы обычно используются в случаях, требующих приложения больших

Слайд 14Гидравлические исполнительные механизмы однонаправленного действия с возвратом по нагрузке
Жидкость поступает в цилиндр
Гидравлические исполнительные механизмы однонаправленного действия с возвратом по нагрузке
Жидкость поступает в цилиндр
Слайд 15Гидравлический исполнительный механизм однонаправленного действия с пружинным возвратом
Жидкость поступает в цилиндр только
Гидравлический исполнительный механизм однонаправленного действия с пружинным возвратом
Жидкость поступает в цилиндр только
Слайд 16Гидравлический исполнительный механизм двойного действия
Цилиндр данного типа полностью заполнен жидкостью. Жидкость подается
Гидравлический исполнительный механизм двойного действия
Цилиндр данного типа полностью заполнен жидкостью. Жидкость подается
Слайд 17Пневматические исполнительные механизмы
Движение, вырабатываемое пневматическим исполнительным механизмом может быть использовано, например, для
Пневматические исполнительные механизмы
Движение, вырабатываемое пневматическим исполнительным механизмом может быть использовано, например, для

Слайд 18Мембранный исполнительный механизм однонаправленного действия
Воздушное давление вводится в ИМ только через один
Мембранный исполнительный механизм однонаправленного действия
Воздушное давление вводится в ИМ только через один
Слайд 19Мембранный исполнительный механизм двойного действия
Содержит два порта для ввода давления. Головка ИМ
Мембранный исполнительный механизм двойного действия
Содержит два порта для ввода давления. Головка ИМ
Слайд 20Поршневой исполнительный механизм
Давление воздуха действует на поршень в цилиндре для развития тяги
Поршневой исполнительный механизм
Давление воздуха действует на поршень в цилиндре для развития тяги
Слайд 21Электрические исполнительные механизмы
Электрические исполнительные механизмы применяются в случаях, когда требуются небольшие
Электрические исполнительные механизмы
Электрические исполнительные механизмы применяются в случаях, когда требуются небольшие

Слайд 22Соленоидные исполнительные механизмы
Использует принцип электромагнитного притяжения для производства механического движения. Представляют собой
Соленоидные исполнительные механизмы
Использует принцип электромагнитного притяжения для производства механического движения. Представляют собой
Слайд 23Типы соленоидных электромагнитов
клапанный
прямоходовой
Клапанные электромагниты имеют небольшое перемещение якоря (несколько миллиметров) и развивают
Типы соленоидных электромагнитов
клапанный
прямоходовой
Клапанные электромагниты имеют небольшое перемещение якоря (несколько миллиметров) и развивают
Слайд 24Электромагнитная муфта с механической связью
1 – ведущая полумуфта,
2 – ведомая полумуфта
Муфта
Электромагнитная муфта с механической связью
1 – ведущая полумуфта,
2 – ведомая полумуфта
Муфта
Слайд 25Муфта с ферромагнитным наполнителем
1 – вал рабочего механизма,
2 – корпус
Муфта с ферромагнитным наполнителем
1 – вал рабочего механизма,
2 – корпус
 Система диспетчеризации инженерного оборудования аэровокзального комплекса
Система диспетчеризации инженерного оборудования аэровокзального комплекса Розробка Web-Сайту Ресторану
Розробка Web-Сайту Ресторану Инструкция по настройке гид-доступа
Инструкция по настройке гид-доступа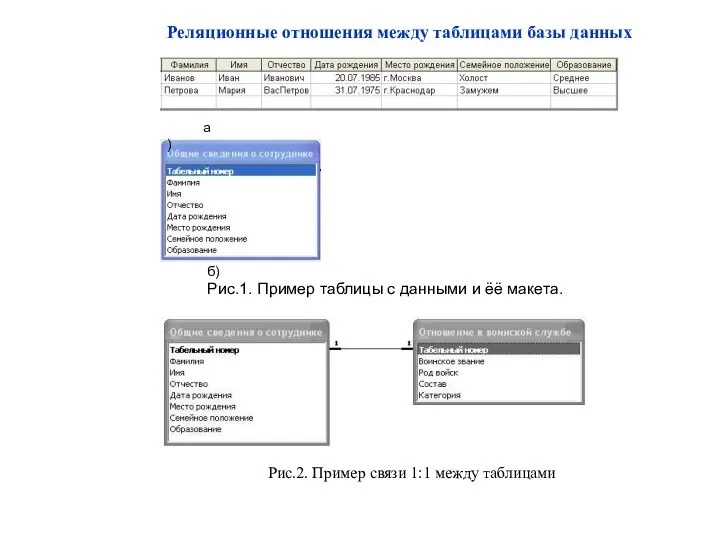 Реляционные отношения между таблицами базы данных
Реляционные отношения между таблицами базы данных Salonoboev.com Онлайн магазин обоев и интерьерных тканей
Salonoboev.com Онлайн магазин обоев и интерьерных тканей Программная инженерия. Лекция 5. Рабочее проектирование
Программная инженерия. Лекция 5. Рабочее проектирование Игры в смартфоне: польза или вред? 1 класс
Игры в смартфоне: польза или вред? 1 класс Работа с видео и звуком. Практическое задание
Работа с видео и звуком. Практическое задание Устройство компьютера
Устройство компьютера Пятое занятие. Функции
Пятое занятие. Функции Работа со строками и файлами
Работа со строками и файлами Инструкция по работе с ЭБС BOOK.RU
Инструкция по работе с ЭБС BOOK.RU Презентация на тему Дискретные и непрерывные сигналы. Носители информации
Презентация на тему Дискретные и непрерывные сигналы. Носители информации  Шаблон презентации
Шаблон презентации Хэштег #ДетиВнеПолитики
Хэштег #ДетиВнеПолитики Лукбук причины социального детокса
Лукбук причины социального детокса Базы данных. Реляционная модель данных
Базы данных. Реляционная модель данных Критическая секция программы
Критическая секция программы Основы программирования. Лабораторная работа №13
Основы программирования. Лабораторная работа №13 Учимся делать размерные сетки
Учимся делать размерные сетки ВКонтакте для бизнеса
ВКонтакте для бизнеса Информационные таможенные технологии
Информационные таможенные технологии Общее понятие системы
Общее понятие системы Роль информационной деятельности в современном обществе
Роль информационной деятельности в современном обществе Презентация на тему Биты в байты
Презентация на тему Биты в байты  Модернизация ИТ-инфраструктуры
Модернизация ИТ-инфраструктуры Файловая система. 2 часть. 8 класс
Файловая система. 2 часть. 8 класс Мы идём в библиотеку
Мы идём в библиотеку