- Классификация электронных систем

Содержание
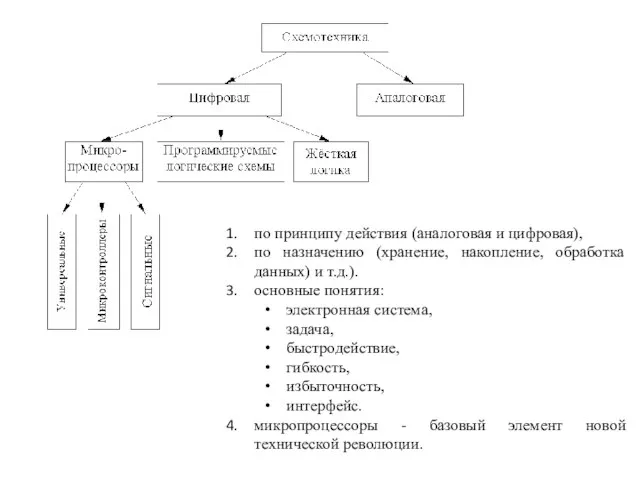
- 2. по принципу действия (аналоговая и цифровая), по назначению (хранение, накопление, обработка данных) и т.д.). основные понятия:
- 3. Типы цифровых устройств Устройства с «жёсткой» логикой работы (выходные сигналы в каждый момент однозначно определяются значениями
- 4. Основные понятия микропроцессорной техники архитектура (открытая и закрытая), система команд (ортогональная и не ортогональная).
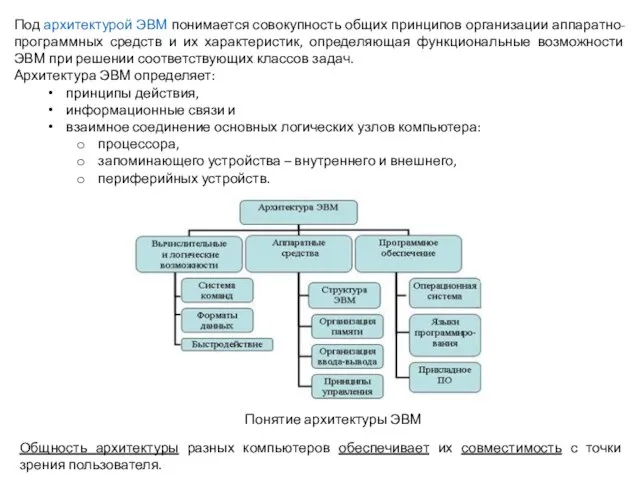
- 5. Под архитектурой ЭВМ понимается совокупность общих принципов организации аппаратно-программных средств и их характеристик, определяющая функциональные возможности
- 6. В настоящее время наибольшее распространение в ЭВМ получили 2 типа архитектуры: – Принстонская (фон Неймана) и
- 7. Декомпозиция вычислительного устройства. Микропрограммная интерпретация языка команд микропроцессора.
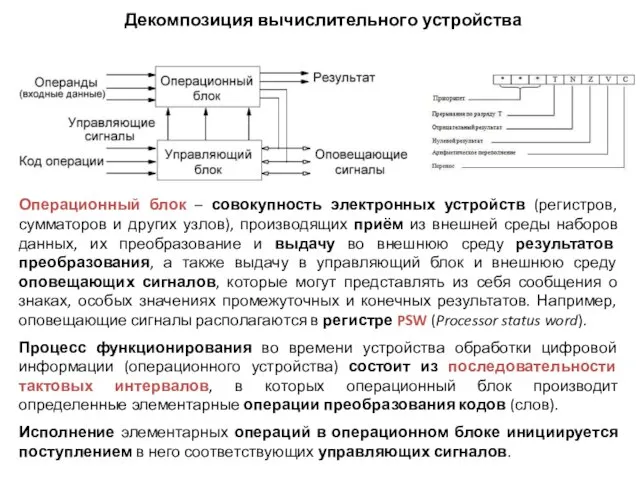
- 8. Декомпозиция вычислительного устройства Операционный блок – совокупность электронных устройств (регистров, сумматоров и других узлов), производящих приём
- 9. Управляющий блок – устройство, которое вырабатывает распределённую во времени последовательность управляющих сигналов, которые порождают в операционном
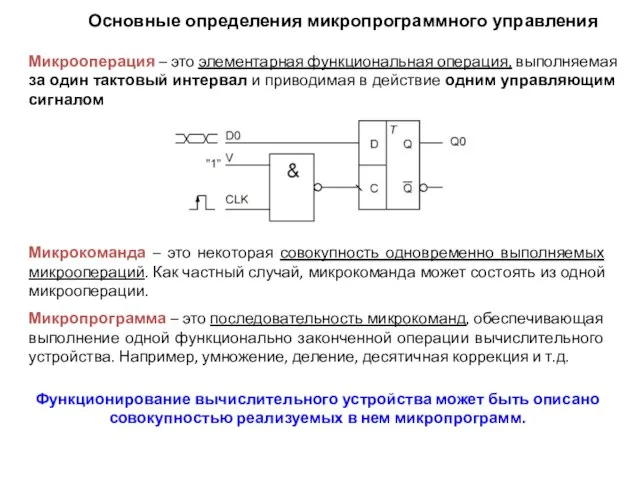
- 10. Основные определения микропрограммного управления Микрооперация – это элементарная функциональная операция, выполняемая за один тактовый интервал и
- 11. Назначение и функции микропроцессора в электронной системе. Важнейшие характеристики микропроцессора.
- 12. Микропроцессор — это центральный блок персонального компьютера, предназначенный для управления работой всех остальных блоков и выполнения
- 13. Важнейшими характеристиками микропроцессора являются: тактовая частота. Характеризует быстродействие компьютера. Режим работы процессора задается микросхемой, называемой генератором
- 14. Типовая структура и основные элементы микропроцессора.
- 15. Типовая структура вычислительной системы Структура вычислительной системы – это некоторая модель, устанавливающая состав, порядок и принципы
- 16. Шина адреса – служит для определения адреса (номера устройства) с которым микропроцессор обменивается в данный момент
- 17. схема управления выборкой команд, регистры (общего назначения, аккумулятор, специального назначения), схемы логики, Схемы управления прерываниями и
- 18. Назначение и организация микроконтроллеров. Основные архитектуры микроконтроллеров
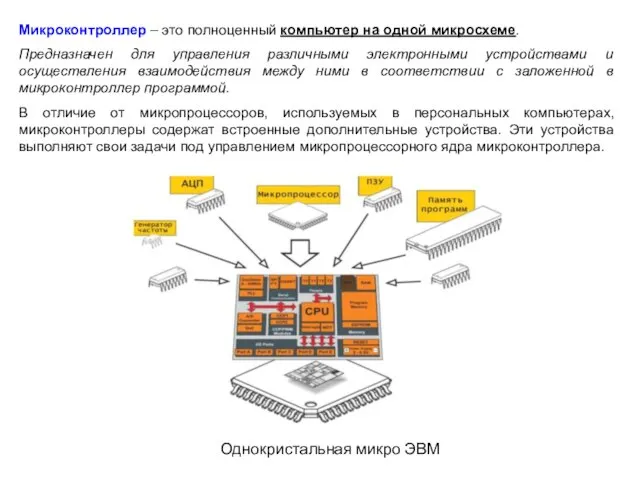
- 19. Микроконтроллер – это полноценный компьютер на одной микросхеме. Предназначен для управления различными электронными устройствами и осуществления
- 20. Все типы МК можно условно разделить на три основных класса: 8-разрядные МК для встраиваемых приложений; 16-
- 21. Отличительные признаки микроконтроллеров модульная организация, при которой на базе одного процессорного ядра (центрального процессора) проектируется ряд
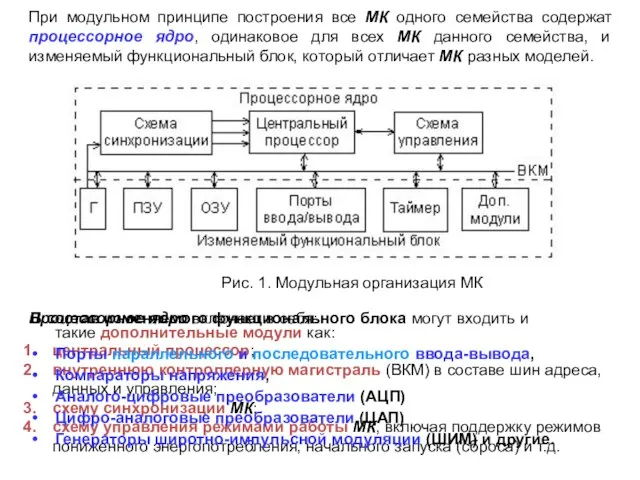
- 22. Процессорное ядро включает в себя: центральный процессор; внутреннюю контроллерную магистраль (ВКМ) в составе шин адреса, данных
- 23. Классическая принстонская архитектура Принстонская архитектура — архитектура микропроцессорной системы с единой шиной для данных и команд
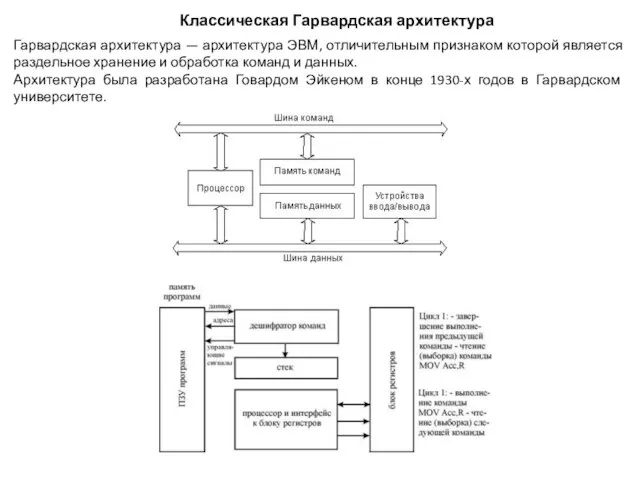
- 24. Классическая Гарвардская архитектура Гарвардская архитектура — архитектура ЭВМ, отличительным признаком которой является раздельное хранение и обработка
- 25. Организация связи микроконтроллера с внешней средой.
- 26. Связь МК с внешней средой производится посредством использования портов ввода-вывода. Порты ввода-вывода бывают: Цифровые Параллельные. Последовательные:
- 27. Назначение параллельного порта Параллельные порты предназначены для обмена информацией микропроцессора с внешними устройствами, при этом в
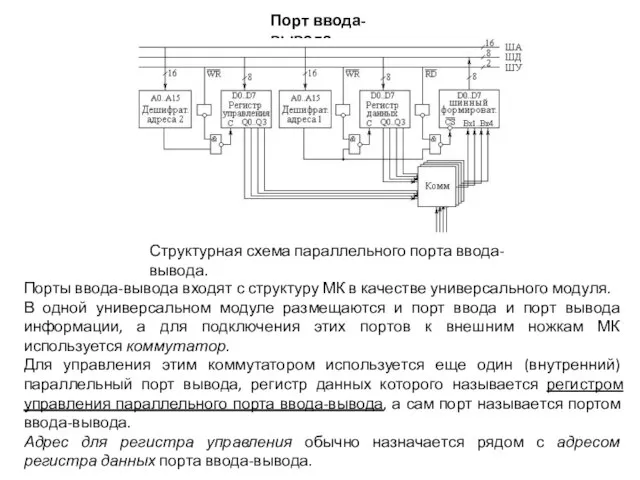
- 28. Порт ввода-вывода Структурная схема параллельного порта ввода-вывода. Порты ввода-вывода входят с структуру МК в качестве универсального
- 29. Режимы работы микропроцессорных систем. Организация и основные типы программных обменов данными в микропроцессорной системе. Режимы -
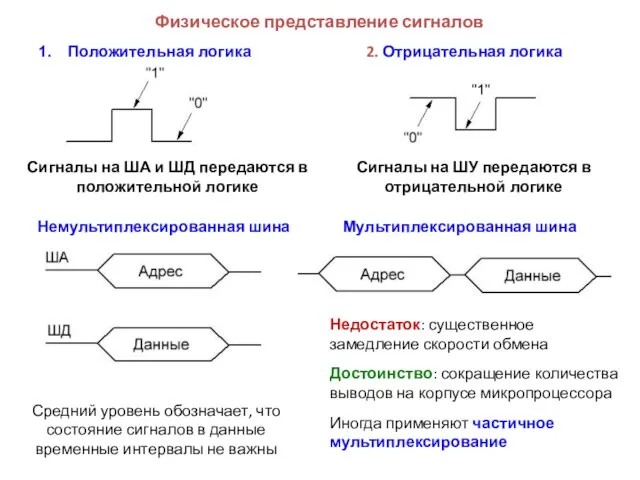
- 30. Физическое представление сигналов Положительная логика 2. Отрицательная логика Немультиплексированная шина Средний уровень обозначает, что состояние сигналов
- 31. Самые главные сигналы на ШУ это стробы обмена. Строб обмена формируется микропроцессором и определяет момент времени
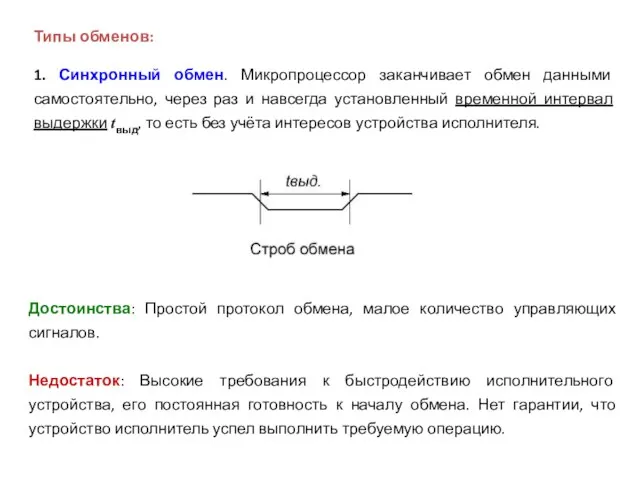
- 32. Типы обменов: 1. Синхронный обмен. Микропроцессор заканчивает обмен данными самостоятельно, через раз и навсегда установленный временной
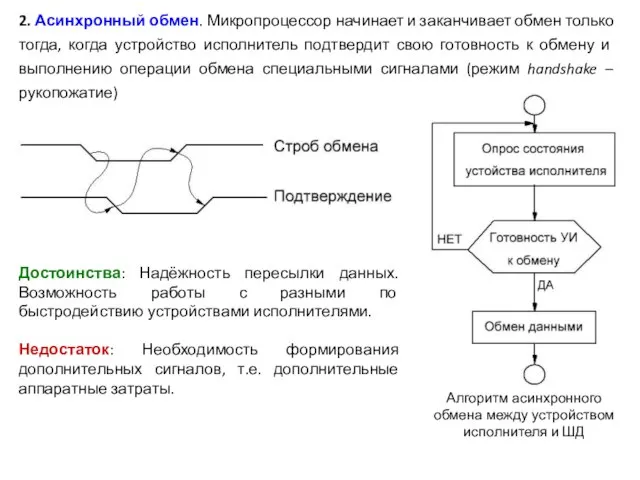
- 33. 2. Асинхронный обмен. Микропроцессор начинает и заканчивает обмен только тогда, когда устройство исполнитель подтвердит свою готовность
- 34. Циклы обмена Типы циклов обмена: Цикл записи (вывода). Цикл чтения (ввода). Цикл чтение-модификация-запись. Цикл обработки прерывания.
- 35. Особенности и основные этапы разработки и проектирования цифровых устройств на основе микроконтроллеров. Параллельная разработка и отладка
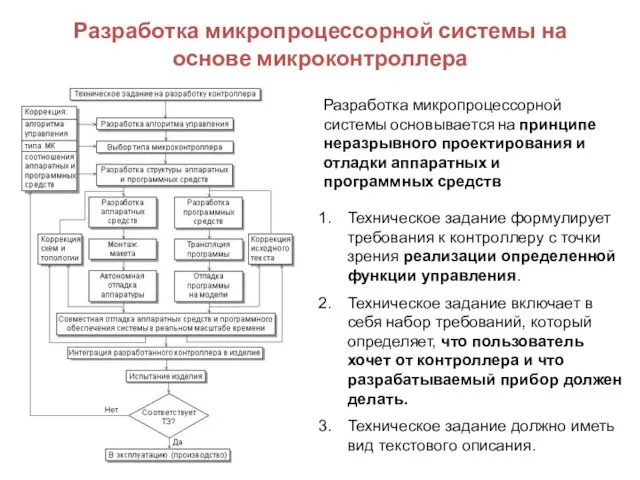
- 36. Разработка микропроцессорной системы на основе микроконтроллера Разработка микропроцессорной системы основывается на принципе неразрывного проектирования и отладки
- 37. На основании требований пользователя составляется функциональная спецификация, которая определяет функции, выполняемые контроллером для пользователя после завершения
- 38. При выборе типа микроконтроллера учитываются следующие основные характеристики: разрядность; быстродействие; набор команд и способы адресации; требования
- 39. Для реализации на практике возможности выбора оптимального микроконтроллера необходима достаточно глубокая проработка алгоритма управления, оценка объема
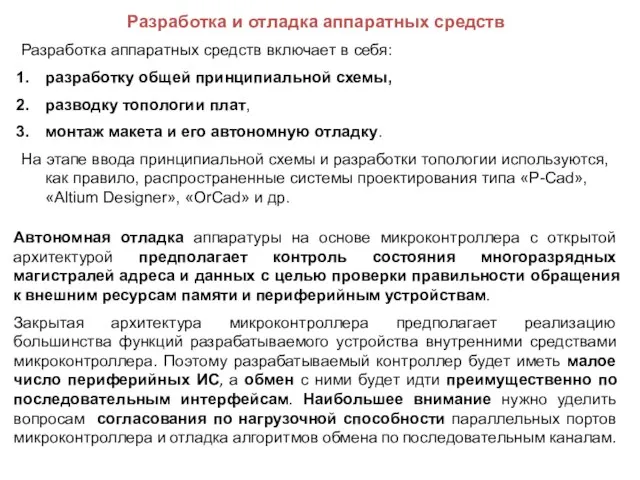
- 40. Разработка и отладка аппаратных средств Разработка аппаратных средств включает в себя: разработку общей принципиальной схемы, разводку
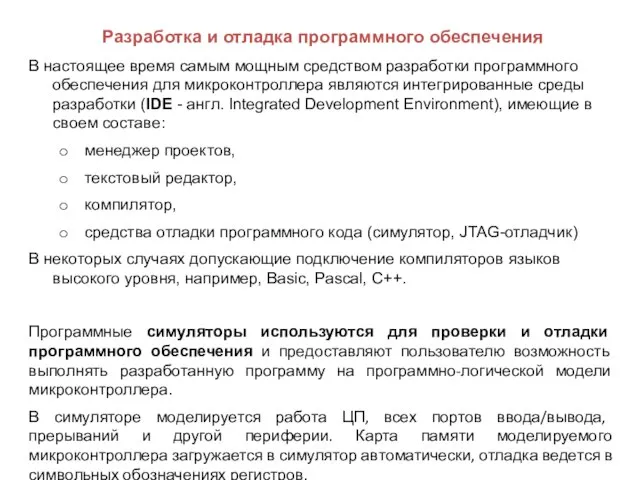
- 41. Разработка и отладка программного обеспечения В настоящее время самым мощным средством разработки программного обеспечения для микроконтроллера
- 42. Структура микропроцессорной системы управления и ее основные компоненты. Особенности цифрового управления техническими процессами.
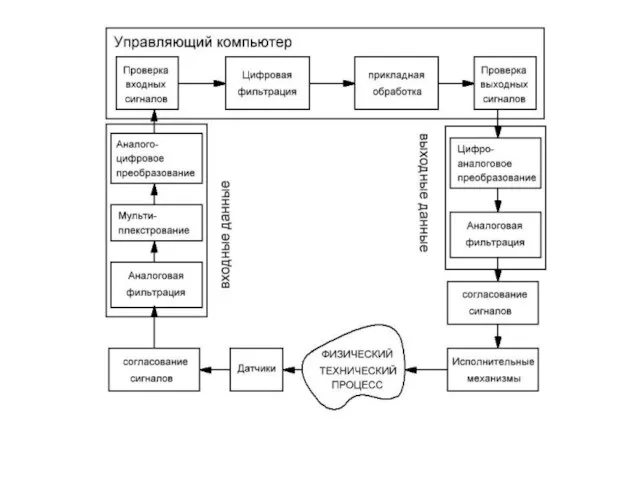
- 43. Система цифрового управления физическим/техническим процессом состоит из следующих компонентов: Датчики и исполнительные механизмы; Устройства преобразования информации
- 45. Физический процесс контролируется с помощью датчиков. ДАТЧИКИ − это устройства, преобразующие физические параметры процесса (температуру, давление
- 46. Особенности цифрового управления процессами
- 47. Свойства процессов, усложняющие управление Уровень сложности системы управления определяется, в первую очередь, свойствами управляемого процесса. Факторы
- 48. Запаздывание сигналов или наличие зон нечувствительности (мертвых зон) представляет собой серьезную проблему для управления. Из-за этого
- 49. Отличие управляющего компьютера от обычного Управление процессами всегда происходит в реальном времени Принципиально другой подход к
- 50. Понятие реального времени. Особенности программирование систем реального времени. Под реальным временем понимается количественная характеристика, которая может
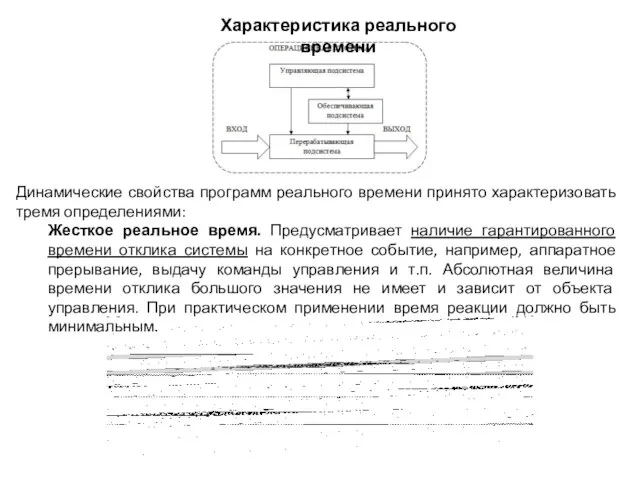
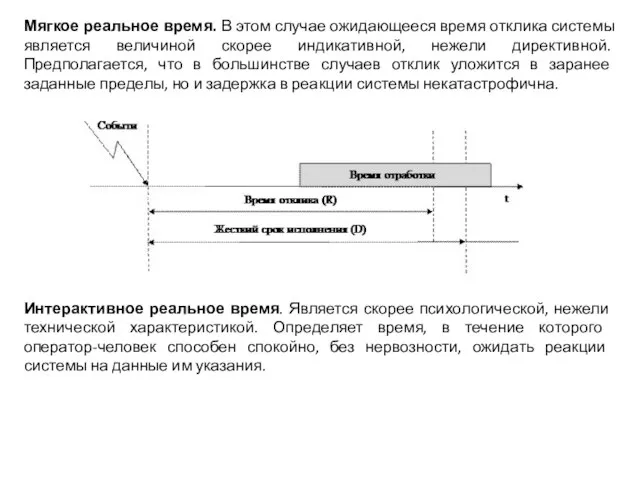
- 51. Динамические свойства программ реального времени принято характеризовать тремя определениями: Жесткое реальное время. Предусматривает наличие гарантированного времени
- 52. Интерактивное реальное время. Является скорее психологической, нежели технической характеристикой. Определяет время, в течение которого оператор-человек способен
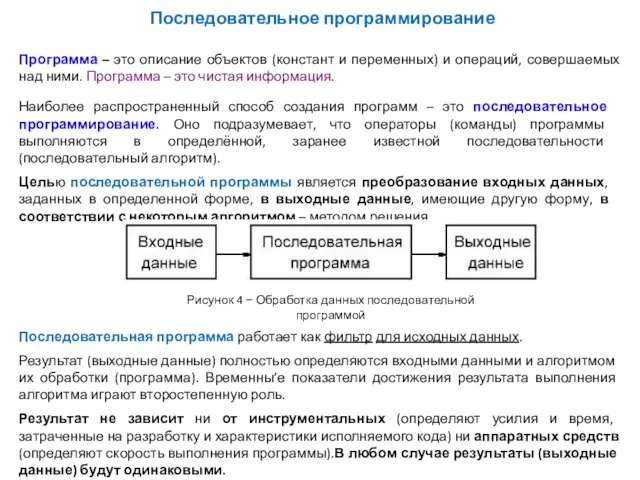
- 53. Последовательное программирование Программа – это описание объектов (констант и переменных) и операций, совершаемых над ними. Программа
- 54. Параллельный алгоритм — алгоритм, который может быть реализован по частям на одном или на множестве различных
- 55. Программирование для системы реального времени сильно отличается от последовательного программирования. Необходимо постоянно иметь в виду условия
- 56. Программируемые промышленные контроллеры.
- 57. Программируемые логические контроллеры Программируемые логические контроллеры — это специальные микрокомпьютеры, предназначенные для выполнения oneраций исполнения управляющего
- 58. Основное преимущество ПЛК заключается в том, что одиночная компактная схема может заменить сотни реле. Другое преимущество
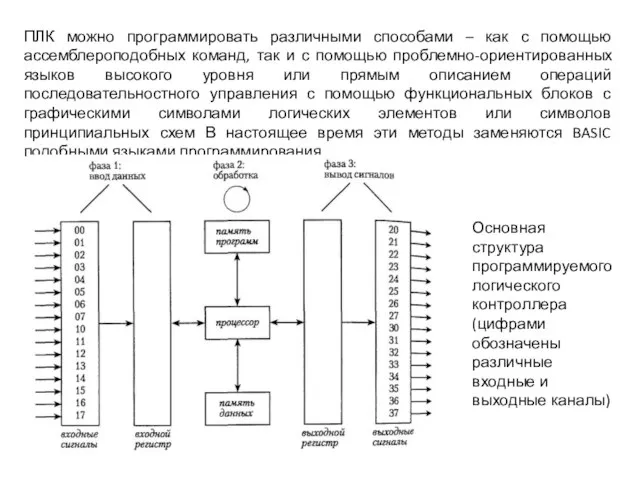
- 59. ПЛК можно программировать различными способами – как с помощью ассемблероподобных команд, так и с помощью проблемно-ориентированных
- 60. Устройства сопряжения с объектами.
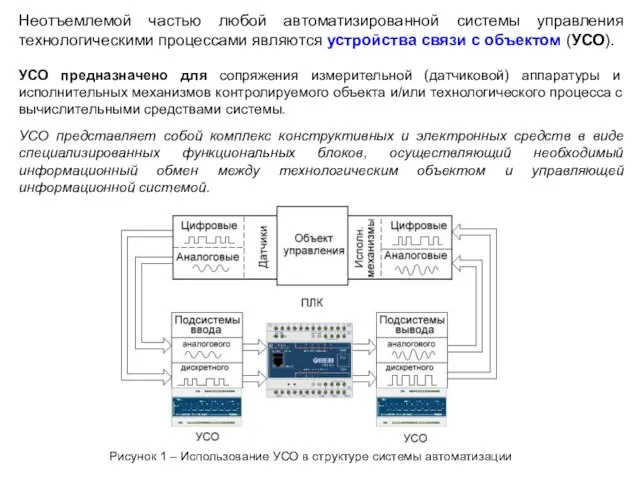
- 61. Неотъемлемой частью любой автоматизированной системы управления технологическими процессами являются устройства связи с объектом (УСО). УСО предназначено
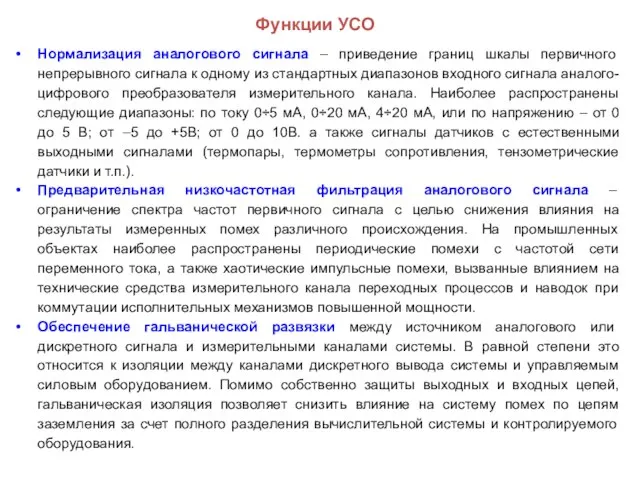
- 62. Нормализация аналогового сигнала – приведение границ шкалы первичного непрерывного сигнала к одному из стандартных диапазонов входного
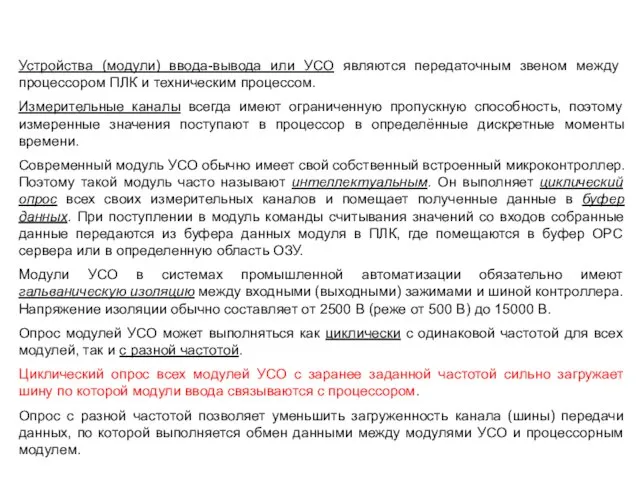
- 63. Устройства (модули) ввода-вывода или УСО являются передаточным звеном между процессором ПЛК и техническим процессом. Измерительные каналы
- 64. Цифровые коммуникации в системах управления техническими процессами. Основные протоколы обмена в системах промышленной автоматизации.
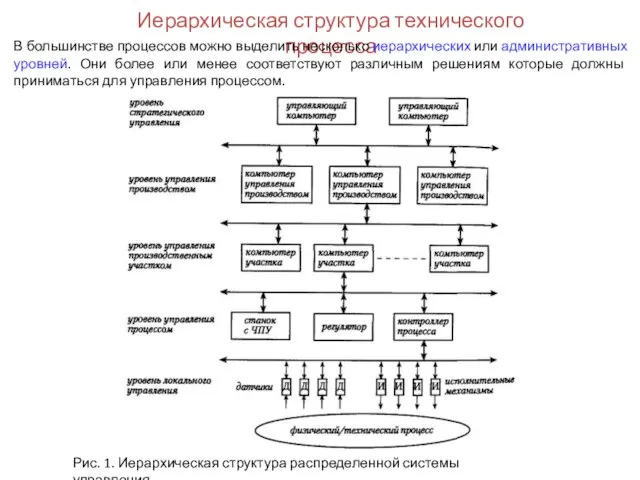
- 65. Иерархическая структура технического процесса В большинстве процессов можно выделить несколько иерархических или административных уровней. Они более
- 66. В распределенных системах модули или даже отдельные входы-выходы, образующие единую систему управления, могут быть разнесены на
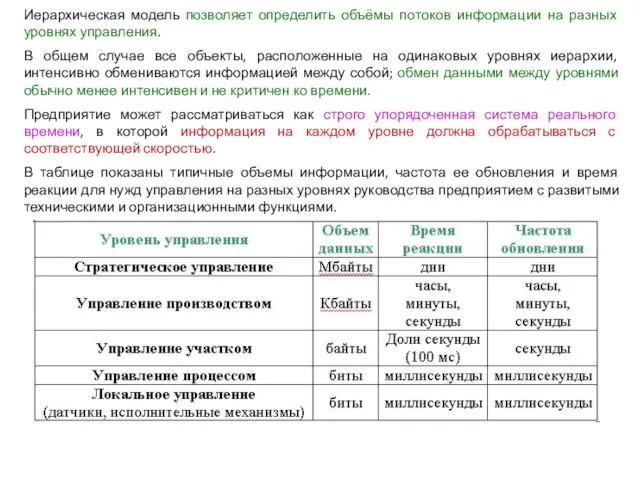
- 67. Иерархическая модель позволяет определить объёмы потоков информации на разных уровнях управления. В общем случае все объекты,
- 68. Основные методы сбора данных от датчиков и передча их от местных (локальных) регуляторов к более высоким
- 69. К наиболее важным способам передачи цифровых данных относятся: Цифровые сети коммутация цепей (устройств); выделенные линии; коммутация
- 70. Коммутации пакетов — это современное состояние в области цифровых коммуникаций, устанавливающая виртуальный канал связи между узлами.
- 71. Шины локального управления (Fieldbus) В промышленных системах наибольшая часть работы (и стоимости) по сбору и обработке
- 72. Шина Bitbus разработана Intel в 1984 году. Соответствует двум первым уровням Модели Взаимодействия Открытых Систем (Open
- 73. Шина Modbus Modbus — коммуникационный протокол, основанный на архитектуре «клиент-сервер». Широко применяется в промышленности для организации
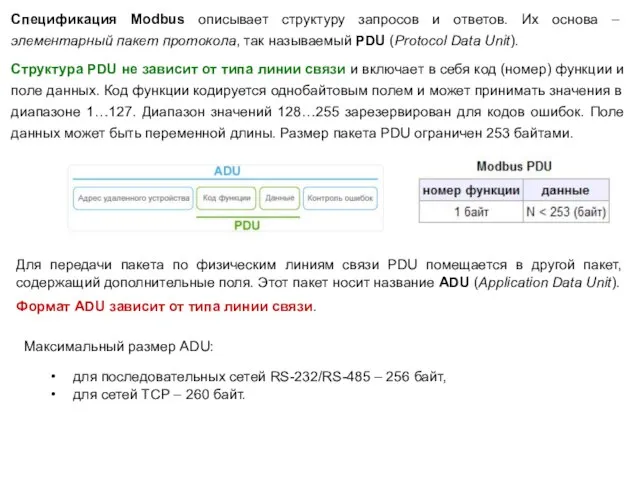
- 74. Спецификация Modbus описывает структуру запросов и ответов. Их основа – элементарный пакет протокола, так называемый PDU
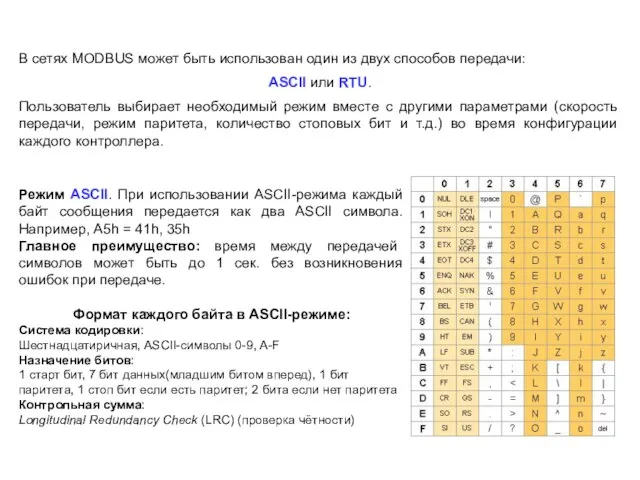
- 75. В сетях MODBUS может быть использован один из двух способов передачи: ASCII или RTU. Пользователь выбирает
- 76. Шина PROFIBUS сочетает функции уровней 1, 2 и 7 модели OSI (физический, канальный и приложений). PROFIBUS
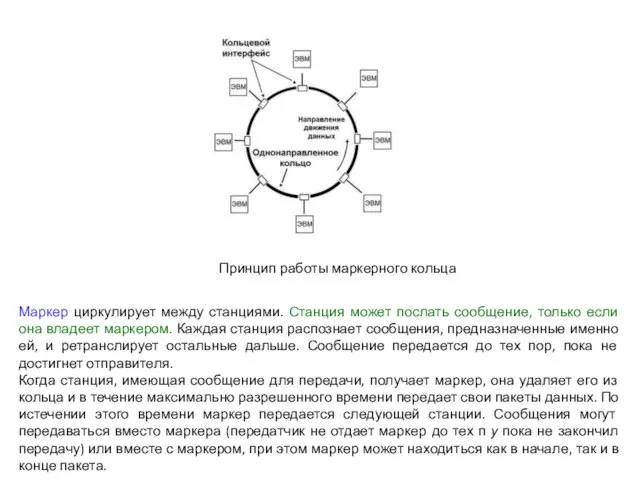
- 77. Принцип работы маркерного кольца Маркер циркулирует между станциями. Станция может послать сообщение, только если она владеет
- 78. физический уровень – отвечает за характеристики физической передачи канальный уровень – определяет протокол доступа к шине
- 79. Системы диспетчерского управления и сбора данных
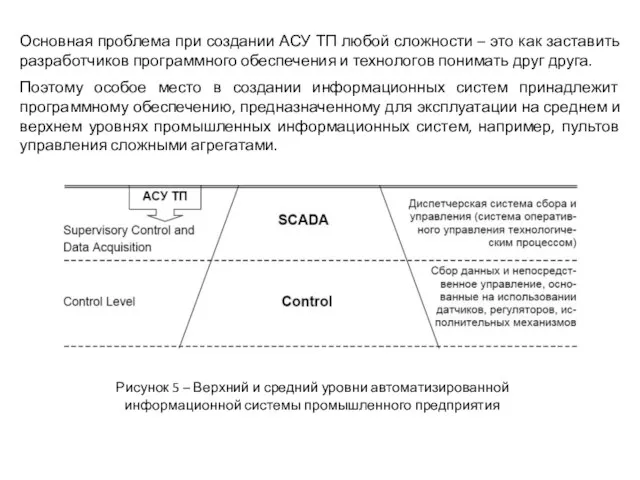
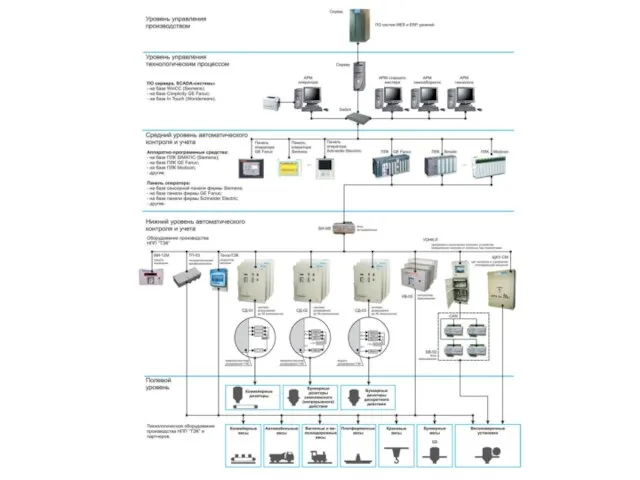
- 80. Рисунок 5 – Верхний и средний уровни автоматизированной информационной системы промышленного предприятия Основная проблема при создании
- 81. Решением явились создание специализированных программных пакетов: SCADA (Диспетчерское управление и сбор данных) является основным ПО систем
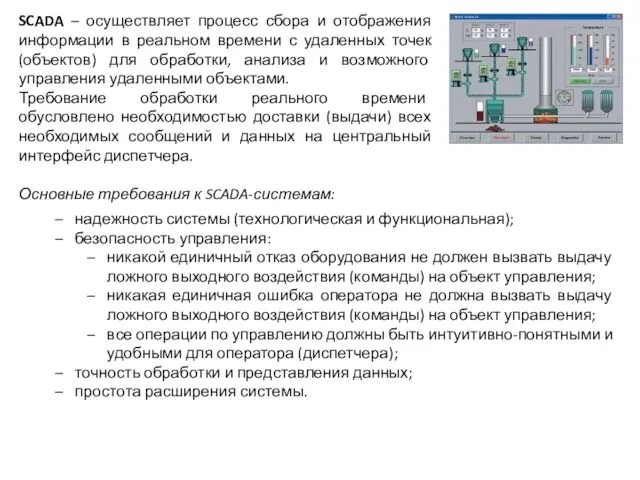
- 82. SCADA – осуществляет процесс сбора и отображения информации в реальном времени с удаленных точек (объектов) для
- 83. Функции человека-оператора в системе диспетчерского управления представляют собой набор вложенных циклов, в которых оператор; планирует, какие
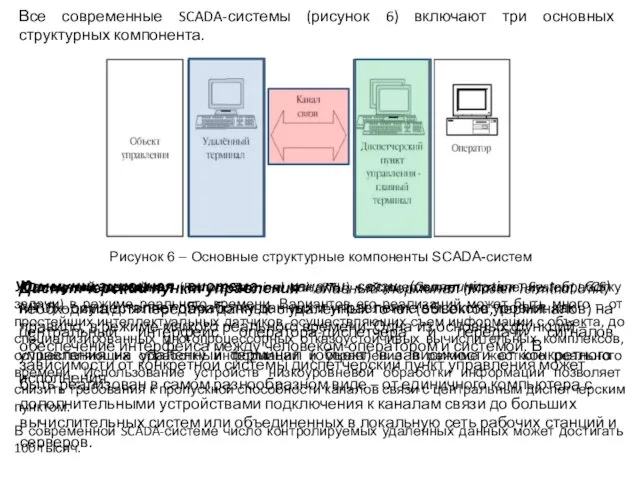
- 84. Все современные SCADA-системы (рисунок 6) включают три основных структурных компонента. Рисунок 6 – Основные структурные компоненты
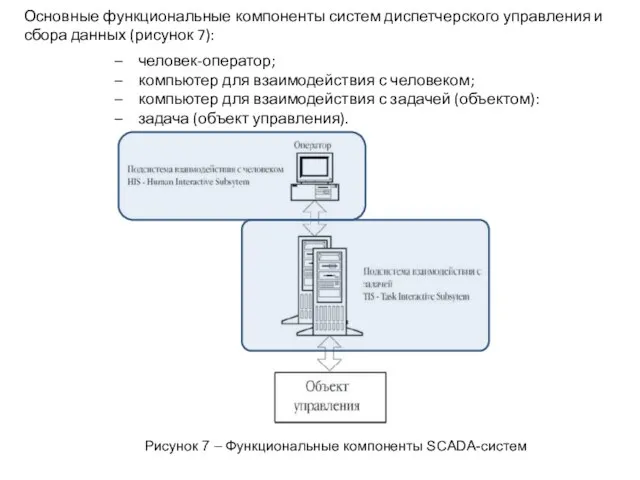
- 85. Основные функциональные компоненты систем диспетчерского управления и сбора данных (рисунок 7): человек-оператор; компьютер для взаимодействия с
- 86. Современные SCADA-системы обеспечивают: обмен данными с ПЛК и УСО (устройства связи с объектом, то есть с
- 87. Для создания рабочего места оператора технологического процесса обычно необходимо реализовать следующий набор функций: органы управления различных
- 88. Понятие Человеко-машинного интерфейса его значение для систем управления
- 89. Основные понятия Интерфейс (англ. interface – сопряжение, поверхность раздела, перегородка) — совокупность возможностей, способов и методов
- 91. С момента появления вычислительной техники основным объектом внимания были сами ЭВМ. Все усилия их создателей были
- 92. Интерфейс пользователя – это важнейший элемент любой технической системы. Назначение человеко-машинного интерфейса – обеспечить обмен информацией
- 93. Модель человеческого поведения дает упрощенную основу для описания взаимодействия между человеком и окружающей средой. Модель человеческого
- 94. 1. Действия на уровне навыков (на самом нижнем уровне) являются наиболее эффективными, поскольку не требуют обдумывания
- 95. Общие принципы проектирования интерфейса пользователя Три основных принципа справедливы для любого прикладного или функционального проектирования и,
- 96. Последовательность означает, что для отображения одинаковых или аналогичных элементов системы применяются однотипные обозначения. Чтобы описание или
- 97. Взаимодействие компонентов системы управления и подходы к их интеграции.
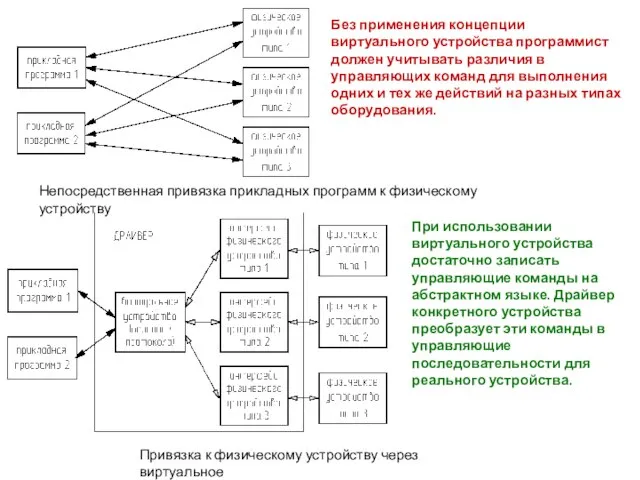
- 99. Непосредственная привязка прикладных программ к физическому устройству Привязка к физическому устройству через виртуальное Без применения концепции
- 100. ОРС (OLE (object linking and embedded – объединение и встраивание объектов) for Process Control (для управления
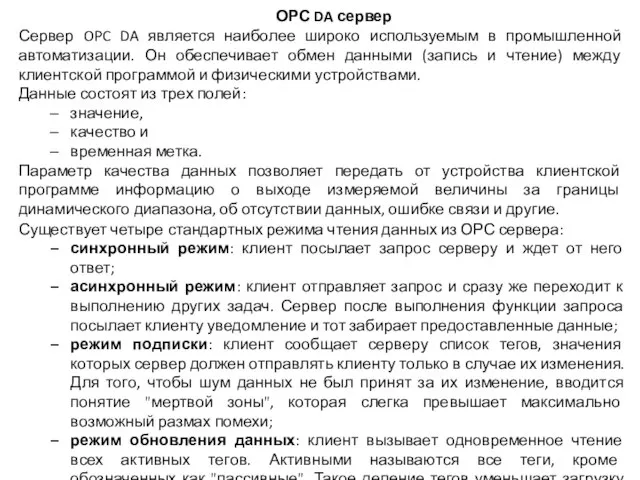
- 101. Стандарт ОРС состоит из нескольких частей: ОРС DA (OPC Data Access) – спецификация для обмена данными
- 102. OPC Data eXchange – спецификация для обмена данными между двумя ОРС DA серверами через сеть Ethernet;
- 103. Сервер OPC DA является наиболее широко используемым в промышленной автоматизации. Он обеспечивает обмен данными (запись и
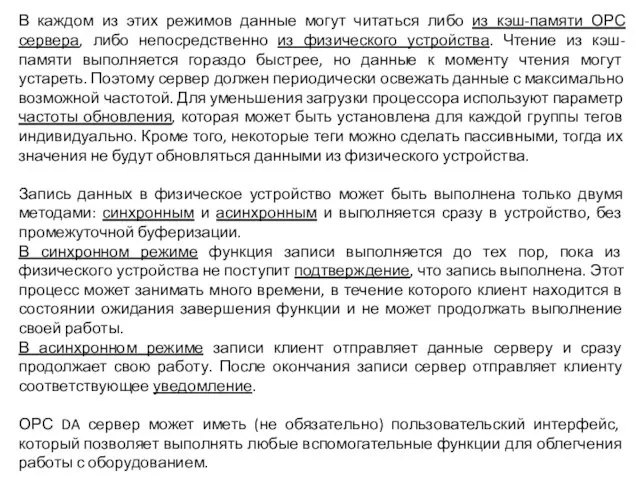
- 104. В каждом из этих режимов данные могут читаться либо из кэш-памяти ОРС сервера, либо непосредственно из
- 105. Понятие резервирования в системах управления.
- 106. Резервирование является практически единственным и широко используемым методом кардинального повышения надежности систем автоматизации. Резервирование позволяет создавать
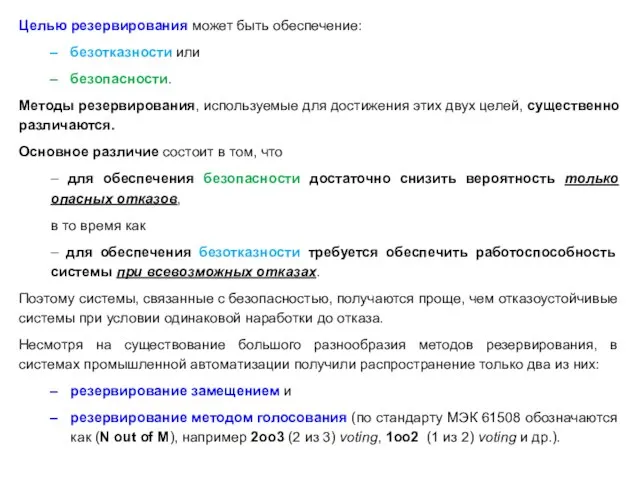
- 107. Целью резервирования может быть обеспечение: безотказности или безопасности. Методы резервирования, используемые для достижения этих двух целей,
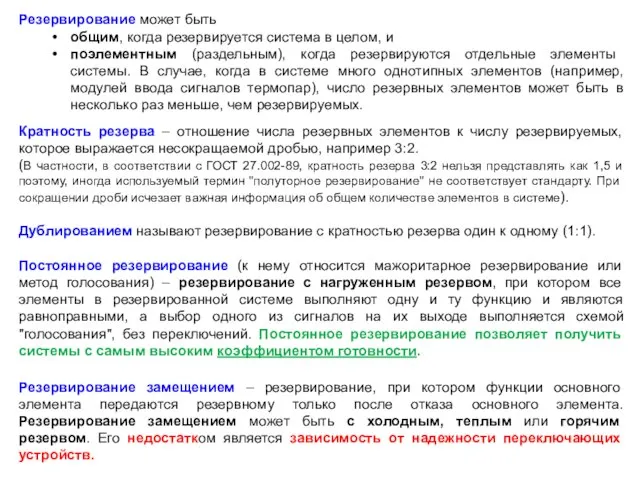
- 108. Резервирование может быть общим, когда резервируется система в целом, и поэлементным (раздельным), когда резервируются отдельные элементы
- 110. Скачать презентацию
Слайд 2по принципу действия (аналоговая и цифровая),
по назначению (хранение, накопление, обработка данных)
по принципу действия (аналоговая и цифровая),
по назначению (хранение, накопление, обработка данных)
Слайд 3Типы цифровых устройств
Устройства с «жёсткой» логикой работы (выходные сигналы в каждый момент
Типы цифровых устройств
Устройства с «жёсткой» логикой работы (выходные сигналы в каждый момент
Слайд 4Основные понятия микропроцессорной техники
архитектура (открытая и закрытая),
система команд (ортогональная и не
Основные понятия микропроцессорной техники
архитектура (открытая и закрытая),
система команд (ортогональная и не
Слайд 5Под архитектурой ЭВМ понимается совокупность общих принципов организации аппаратно-программных средств и их
Под архитектурой ЭВМ понимается совокупность общих принципов организации аппаратно-программных средств и их
Слайд 6В настоящее время наибольшее распространение в ЭВМ получили 2 типа архитектуры:
–
В настоящее время наибольшее распространение в ЭВМ получили 2 типа архитектуры:
–
Слайд 7Декомпозиция вычислительного устройства.
Микропрограммная интерпретация языка команд микропроцессора.
Декомпозиция вычислительного устройства.
Микропрограммная интерпретация языка команд микропроцессора.
Слайд 8Декомпозиция вычислительного устройства
Операционный блок – совокупность электронных устройств (регистров, сумматоров и других
Декомпозиция вычислительного устройства
Операционный блок – совокупность электронных устройств (регистров, сумматоров и других
Слайд 9Управляющий блок – устройство, которое вырабатывает распределённую во времени последовательность управляющих сигналов,
Управляющий блок – устройство, которое вырабатывает распределённую во времени последовательность управляющих сигналов,
Слайд 10Основные определения микропрограммного управления
Микрооперация – это элементарная функциональная операция, выполняемая за один
Основные определения микропрограммного управления
Микрооперация – это элементарная функциональная операция, выполняемая за один
Слайд 11Назначение и функции микропроцессора в электронной системе.
Важнейшие характеристики микропроцессора.
Назначение и функции микропроцессора в электронной системе.
Важнейшие характеристики микропроцессора.
Слайд 12Микропроцессор — это центральный блок персонального компьютера, предназначенный для управления работой всех
Микропроцессор — это центральный блок персонального компьютера, предназначенный для управления работой всех
Слайд 13Важнейшими характеристиками микропроцессора являются:
тактовая частота. Характеризует быстродействие компьютера. Режим работы процессора задается
Важнейшими характеристиками микропроцессора являются:
тактовая частота. Характеризует быстродействие компьютера. Режим работы процессора задается
Слайд 14Типовая структура и основные элементы микропроцессора.
Типовая структура и основные элементы микропроцессора.
Слайд 15Типовая структура вычислительной системы
Структура вычислительной системы – это некоторая модель, устанавливающая
Типовая структура вычислительной системы
Структура вычислительной системы – это некоторая модель, устанавливающая

Слайд 16Шина адреса – служит для определения адреса (номера устройства) с которым микропроцессор
Шина адреса – служит для определения адреса (номера устройства) с которым микропроцессор
Слайд 17схема управления выборкой команд,
регистры (общего назначения, аккумулятор, специального назначения),
схемы логики,
Схемы
схема управления выборкой команд,
регистры (общего назначения, аккумулятор, специального назначения),
схемы логики,
Схемы
Слайд 18Назначение и организация микроконтроллеров.
Основные архитектуры микроконтроллеров
Назначение и организация микроконтроллеров.
Основные архитектуры микроконтроллеров
Слайд 19Микроконтроллер – это полноценный компьютер на одной микросхеме.
Предназначен для управления различными
Микроконтроллер – это полноценный компьютер на одной микросхеме.
Предназначен для управления различными
Слайд 20Все типы МК можно условно разделить на три основных класса:
8-разрядные МК для
Все типы МК можно условно разделить на три основных класса:
8-разрядные МК для
Слайд 21Отличительные признаки микроконтроллеров
модульная организация, при которой на базе одного процессорного ядра (центрального
Отличительные признаки микроконтроллеров
модульная организация, при которой на базе одного процессорного ядра (центрального
Слайд 22Процессорное ядро включает в себя:
центральный процессор;
внутреннюю контроллерную магистраль (ВКМ) в составе
Процессорное ядро включает в себя:
центральный процессор;
внутреннюю контроллерную магистраль (ВКМ) в составе
Слайд 23Классическая принстонская архитектура
Принстонская архитектура — архитектура микропроцессорной системы с единой шиной для
Классическая принстонская архитектура
Принстонская архитектура — архитектура микропроцессорной системы с единой шиной для

Слайд 24Классическая Гарвардская архитектура
Гарвардская архитектура — архитектура ЭВМ, отличительным признаком которой является раздельное
Классическая Гарвардская архитектура
Гарвардская архитектура — архитектура ЭВМ, отличительным признаком которой является раздельное
Слайд 25Организация связи микроконтроллера с внешней средой.
Организация связи микроконтроллера с внешней средой.
Слайд 26Связь МК с внешней средой производится посредством использования портов ввода-вывода.
Порты ввода-вывода бывают:
Цифровые
Параллельные.
Последовательные:
USART
SPI
I2C
USB
LIN
Связь МК с внешней средой производится посредством использования портов ввода-вывода.
Порты ввода-вывода бывают:
Цифровые
Параллельные.
Последовательные:
USART
SPI
I2C
USB
LIN
Слайд 27Назначение параллельного порта
Параллельные порты предназначены для обмена информацией микропроцессора с внешними устройствами,
Назначение параллельного порта
Параллельные порты предназначены для обмена информацией микропроцессора с внешними устройствами,
Слайд 28Порт ввода-вывода
Структурная схема параллельного порта ввода-вывода.
Порты ввода-вывода входят с структуру МК в
Порт ввода-вывода
Структурная схема параллельного порта ввода-вывода.
Порты ввода-вывода входят с структуру МК в
Слайд 29Режимы работы микропроцессорных систем.
Организация и основные типы программных обменов данными в
Режимы работы микропроцессорных систем.
Организация и основные типы программных обменов данными в
Слайд 30Физическое представление сигналов
Положительная логика
2. Отрицательная логика
Немультиплексированная шина
Средний уровень обозначает, что состояние сигналов
Физическое представление сигналов
Положительная логика
2. Отрицательная логика
Немультиплексированная шина
Средний уровень обозначает, что состояние сигналов
Слайд 31Самые главные сигналы на ШУ это стробы обмена.
Строб обмена формируется микропроцессором и
Самые главные сигналы на ШУ это стробы обмена.
Строб обмена формируется микропроцессором и
Слайд 32Типы обменов:
1. Синхронный обмен. Микропроцессор заканчивает обмен данными самостоятельно, через раз и
Типы обменов:
1. Синхронный обмен. Микропроцессор заканчивает обмен данными самостоятельно, через раз и
Слайд 332. Асинхронный обмен. Микропроцессор начинает и заканчивает обмен только тогда, когда устройство
2. Асинхронный обмен. Микропроцессор начинает и заканчивает обмен только тогда, когда устройство
Слайд 34Циклы обмена
Типы циклов обмена:
Цикл записи (вывода).
Цикл чтения (ввода).
Цикл чтение-модификация-запись.
Цикл обработки прерывания.
Цикл
Циклы обмена
Типы циклов обмена:
Цикл записи (вывода).
Цикл чтения (ввода).
Цикл чтение-модификация-запись.
Цикл обработки прерывания.
Цикл
Слайд 35Особенности и основные этапы разработки и проектирования цифровых устройств на основе микроконтроллеров.
Параллельная
Особенности и основные этапы разработки и проектирования цифровых устройств на основе микроконтроллеров.
Параллельная
Слайд 36Разработка микропроцессорной системы на основе микроконтроллера
Разработка микропроцессорной системы основывается на принципе
Разработка микропроцессорной системы на основе микроконтроллера
Разработка микропроцессорной системы основывается на принципе
Слайд 37На основании требований пользователя составляется функциональная спецификация, которая определяет функции, выполняемые контроллером
На основании требований пользователя составляется функциональная спецификация, которая определяет функции, выполняемые контроллером
Слайд 38При выборе типа микроконтроллера учитываются следующие основные характеристики:
разрядность;
быстродействие;
набор команд и
При выборе типа микроконтроллера учитываются следующие основные характеристики:
разрядность;
быстродействие;
набор команд и
Слайд 39Для реализации на практике возможности выбора оптимального микроконтроллера необходима
достаточно глубокая проработка
Для реализации на практике возможности выбора оптимального микроконтроллера необходима
достаточно глубокая проработка
Слайд 40Разработка и отладка аппаратных средств
Разработка аппаратных средств включает в себя:
разработку общей
Разработка и отладка аппаратных средств
Разработка аппаратных средств включает в себя:
разработку общей
Слайд 41Разработка и отладка программного обеспечения
В настоящее время самым мощным средством разработки
Разработка и отладка программного обеспечения
В настоящее время самым мощным средством разработки
Слайд 42Структура микропроцессорной системы управления и ее основные компоненты.
Особенности цифрового управления техническими
Структура микропроцессорной системы управления и ее основные компоненты.
Особенности цифрового управления техническими
Слайд 43Система цифрового управления физическим/техническим процессом состоит из следующих компонентов:
Датчики и исполнительные механизмы;
Устройства
Система цифрового управления физическим/техническим процессом состоит из следующих компонентов:
Датчики и исполнительные механизмы;
Устройства

Слайд 45Физический процесс контролируется с помощью датчиков.
ДАТЧИКИ − это устройства, преобразующие физические параметры
Физический процесс контролируется с помощью датчиков.
ДАТЧИКИ − это устройства, преобразующие физические параметры
Слайд 46Особенности цифрового
управления процессами
Особенности цифрового
управления процессами
Слайд 47Свойства процессов, усложняющие управление
Уровень сложности системы управления определяется, в первую очередь,
Свойства процессов, усложняющие управление
Уровень сложности системы управления определяется, в первую очередь,
Слайд 48Запаздывание сигналов или наличие зон нечувствительности (мертвых зон) представляет собой серьезную проблему
Запаздывание сигналов или наличие зон нечувствительности (мертвых зон) представляет собой серьезную проблему
Слайд 49Отличие управляющего компьютера от обычного
Управление процессами всегда происходит в реальном времени
Принципиально другой
Отличие управляющего компьютера от обычного
Управление процессами всегда происходит в реальном времени
Принципиально другой
Слайд 50Понятие реального времени.
Особенности программирование систем реального времени.
Под реальным временем понимается количественная
Понятие реального времени.
Особенности программирование систем реального времени.
Под реальным временем понимается количественная
Слайд 51Динамические свойства программ реального времени принято характеризовать тремя определениями:
Жесткое реальное время. Предусматривает
Динамические свойства программ реального времени принято характеризовать тремя определениями:
Жесткое реальное время. Предусматривает
Слайд 52Интерактивное реальное время. Является скорее психологической, нежели технической характеристикой. Определяет время, в
Интерактивное реальное время. Является скорее психологической, нежели технической характеристикой. Определяет время, в
Слайд 53Последовательное программирование
Программа – это описание объектов (констант и переменных) и операций, совершаемых
Последовательное программирование
Программа – это описание объектов (констант и переменных) и операций, совершаемых
Слайд 54Параллельный алгоритм — алгоритм, который может быть реализован по частям на одном
Параллельный алгоритм — алгоритм, который может быть реализован по частям на одном
Слайд 55Программирование для системы реального времени сильно отличается от последовательного программирования. Необходимо постоянно
Программирование для системы реального времени сильно отличается от последовательного программирования. Необходимо постоянно
Слайд 56Программируемые промышленные контроллеры.
Программируемые промышленные контроллеры.
Слайд 57Программируемые логические контроллеры
Программируемые логические контроллеры — это специальные микрокомпьютеры, предназначенные для выполнения
Программируемые логические контроллеры
Программируемые логические контроллеры — это специальные микрокомпьютеры, предназначенные для выполнения
Слайд 58Основное преимущество ПЛК заключается в том, что одиночная компактная схема может заменить
Основное преимущество ПЛК заключается в том, что одиночная компактная схема может заменить
Слайд 59ПЛК можно программировать различными способами – как с помощью ассемблероподобных команд, так
ПЛК можно программировать различными способами – как с помощью ассемблероподобных команд, так
Слайд 60Устройства сопряжения с объектами.
Устройства сопряжения с объектами.

Слайд 61Неотъемлемой частью любой автоматизированной системы управления технологическими процессами являются устройства связи с
Неотъемлемой частью любой автоматизированной системы управления технологическими процессами являются устройства связи с
Слайд 62Нормализация аналогового сигнала – приведение границ шкалы первичного непрерывного сигнала к одному
Нормализация аналогового сигнала – приведение границ шкалы первичного непрерывного сигнала к одному
Слайд 63Устройства (модули) ввода-вывода или УСО являются передаточным звеном между процессором ПЛК и
Устройства (модули) ввода-вывода или УСО являются передаточным звеном между процессором ПЛК и
Слайд 64Цифровые коммуникации в системах управления техническими процессами.
Основные протоколы обмена в системах
Цифровые коммуникации в системах управления техническими процессами.
Основные протоколы обмена в системах
Слайд 65Иерархическая структура технического процесса
В большинстве процессов можно выделить несколько иерархических или административных
Иерархическая структура технического процесса
В большинстве процессов можно выделить несколько иерархических или административных
Слайд 66В распределенных системах модули или даже отдельные входы-выходы, образующие единую систему управления,
В распределенных системах модули или даже отдельные входы-выходы, образующие единую систему управления,

Слайд 67Иерархическая модель позволяет определить объёмы потоков информации на разных уровнях управления.
В
Иерархическая модель позволяет определить объёмы потоков информации на разных уровнях управления.
В
Слайд 68Основные методы сбора данных от датчиков и передча их от местных (локальных)
Основные методы сбора данных от датчиков и передча их от местных (локальных)
Слайд 69К наиболее важным способам передачи цифровых данных относятся:
Цифровые сети
коммутация цепей (устройств);
выделенные линии;
коммутация
К наиболее важным способам передачи цифровых данных относятся:
Цифровые сети
коммутация цепей (устройств);
выделенные линии;
коммутация
Слайд 70Коммутации пакетов — это современное состояние в области цифровых коммуникаций, устанавливающая виртуальный
Коммутации пакетов — это современное состояние в области цифровых коммуникаций, устанавливающая виртуальный
Слайд 71Шины локального управления (Fieldbus)
В промышленных системах наибольшая часть работы (и стоимости) по
Шины локального управления (Fieldbus)
В промышленных системах наибольшая часть работы (и стоимости) по
Слайд 72Шина Bitbus разработана Intel в 1984 году. Соответствует двум первым уровням Модели
Шина Bitbus разработана Intel в 1984 году. Соответствует двум первым уровням Модели
Слайд 73Шина Modbus
Modbus — коммуникационный протокол, основанный на архитектуре «клиент-сервер». Широко применяется в
Шина Modbus
Modbus — коммуникационный протокол, основанный на архитектуре «клиент-сервер». Широко применяется в
Слайд 74Спецификация Modbus описывает структуру запросов и ответов. Их основа – элементарный пакет
Спецификация Modbus описывает структуру запросов и ответов. Их основа – элементарный пакет
Слайд 75В сетях MODBUS может быть использован один из двух способов передачи:
ASCII
В сетях MODBUS может быть использован один из двух способов передачи:
ASCII
Слайд 76Шина PROFIBUS сочетает функции уровней 1, 2 и 7 модели OSI (физический,
Шина PROFIBUS сочетает функции уровней 1, 2 и 7 модели OSI (физический,
Слайд 77Принцип работы маркерного кольца
Маркер циркулирует между станциями. Станция может послать сообщение, только
Принцип работы маркерного кольца
Маркер циркулирует между станциями. Станция может послать сообщение, только
Слайд 78физический уровень – отвечает за характеристики физической передачи
канальный уровень – определяет протокол
физический уровень – отвечает за характеристики физической передачи
канальный уровень – определяет протокол
Слайд 79Системы диспетчерского управления и сбора данных
Системы диспетчерского управления и сбора данных
Слайд 80Рисунок 5 – Верхний и средний уровни автоматизированной информационной системы промышленного предприятия
Основная
Рисунок 5 – Верхний и средний уровни автоматизированной информационной системы промышленного предприятия
Основная
Слайд 81Решением явились создание специализированных программных пакетов:
SCADA (Диспетчерское управление и сбор данных) является
Решением явились создание специализированных программных пакетов:
SCADA (Диспетчерское управление и сбор данных) является
Слайд 82SCADA – осуществляет процесс сбора и отображения информации в реальном времени с
SCADA – осуществляет процесс сбора и отображения информации в реальном времени с
Слайд 83Функции человека-оператора в системе диспетчерского управления представляют собой набор вложенных циклов, в
Функции человека-оператора в системе диспетчерского управления представляют собой набор вложенных циклов, в
Слайд 84Все современные SCADA-системы (рисунок 6) включают три основных структурных компонента.
Рисунок 6 –
Все современные SCADA-системы (рисунок 6) включают три основных структурных компонента.
Рисунок 6 –
Слайд 85Основные функциональные компоненты систем диспетчерского управления и сбора данных (рисунок 7):
человек-оператор;
компьютер для
Основные функциональные компоненты систем диспетчерского управления и сбора данных (рисунок 7):
человек-оператор;
компьютер для
Слайд 86Современные SCADA-системы обеспечивают:
обмен данными с ПЛК и УСО (устройства связи с объектом,
Современные SCADA-системы обеспечивают:
обмен данными с ПЛК и УСО (устройства связи с объектом,
Слайд 87Для создания рабочего места оператора технологического процесса обычно необходимо реализовать следующий набор
Для создания рабочего места оператора технологического процесса обычно необходимо реализовать следующий набор
Слайд 88Понятие Человеко-машинного интерфейса его значение для систем управления
Понятие Человеко-машинного интерфейса его значение для систем управления
Слайд 89Основные понятия
Интерфейс (англ. interface – сопряжение, поверхность раздела, перегородка) — совокупность возможностей,
Основные понятия
Интерфейс (англ. interface – сопряжение, поверхность раздела, перегородка) — совокупность возможностей,
Слайд 91С момента появления вычислительной техники основным объектом внимания были сами ЭВМ. Все
С момента появления вычислительной техники основным объектом внимания были сами ЭВМ. Все
Слайд 92Интерфейс пользователя – это важнейший элемент любой технической системы.
Назначение человеко-машинного интерфейса –
Интерфейс пользователя – это важнейший элемент любой технической системы.
Назначение человеко-машинного интерфейса –
Слайд 93Модель человеческого поведения дает упрощенную основу для описания взаимодействия между человеком и
Модель человеческого поведения дает упрощенную основу для описания взаимодействия между человеком и
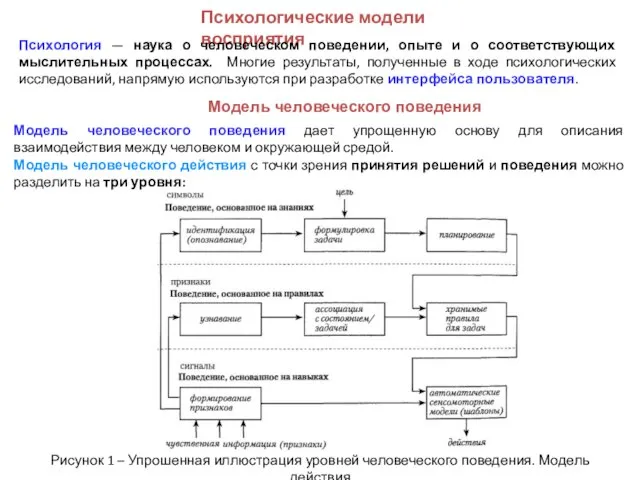
Слайд 941. Действия на уровне навыков (на самом нижнем уровне) являются наиболее эффективными,
1. Действия на уровне навыков (на самом нижнем уровне) являются наиболее эффективными,
Слайд 95Общие принципы проектирования интерфейса пользователя
Три основных принципа справедливы для любого прикладного или
Общие принципы проектирования интерфейса пользователя
Три основных принципа справедливы для любого прикладного или
Слайд 96Последовательность означает, что для отображения одинаковых или аналогичных элементов системы применяются однотипные
Последовательность означает, что для отображения одинаковых или аналогичных элементов системы применяются однотипные
Слайд 97Взаимодействие компонентов системы управления и подходы к их интеграции.
Взаимодействие компонентов системы управления и подходы к их интеграции.
Слайд 99Непосредственная привязка прикладных программ к физическому устройству
Привязка к физическому устройству через виртуальное
Без
Непосредственная привязка прикладных программ к физическому устройству
Привязка к физическому устройству через виртуальное
Без
Слайд 100ОРС (OLE (object linking and embedded – объединение и встраивание объектов) for
ОРС (OLE (object linking and embedded – объединение и встраивание объектов) for
Слайд 101Стандарт ОРС состоит из нескольких частей:
ОРС DA (OPC Data Access) – спецификация
Стандарт ОРС состоит из нескольких частей:
ОРС DA (OPC Data Access) – спецификация
Слайд 102OPC Data eXchange – спецификация для обмена данными между двумя ОРС DA
OPC Data eXchange – спецификация для обмена данными между двумя ОРС DA
Слайд 103Сервер OPC DA является наиболее широко используемым в промышленной автоматизации. Он обеспечивает
Сервер OPC DA является наиболее широко используемым в промышленной автоматизации. Он обеспечивает
Слайд 104В каждом из этих режимов данные могут читаться либо из кэш-памяти ОРС
В каждом из этих режимов данные могут читаться либо из кэш-памяти ОРС
Слайд 105Понятие резервирования в системах управления.
Понятие резервирования в системах управления.
Слайд 106Резервирование является практически единственным и широко используемым методом кардинального повышения надежности систем
Резервирование является практически единственным и широко используемым методом кардинального повышения надежности систем
Слайд 107Целью резервирования может быть обеспечение:
безотказности или
безопасности.
Методы резервирования, используемые для достижения этих
Целью резервирования может быть обеспечение:
безотказности или
безопасности.
Методы резервирования, используемые для достижения этих
Слайд 108Резервирование может быть
общим, когда резервируется система в целом, и
поэлементным (раздельным),
Резервирование может быть
общим, когда резервируется система в целом, и
поэлементным (раздельным),
 Основы работы в EXCEL. Занятие 3
Основы работы в EXCEL. Занятие 3 Пакет подготовки презентаций
Пакет подготовки презентаций Предсталение информации в компьютере
Предсталение информации в компьютере Resume Or Curriculum vitae
Resume Or Curriculum vitae Генерация и обработка аудио потока
Генерация и обработка аудио потока Базовая навигация в SAP
Базовая навигация в SAP Guseyn Gasanov
Guseyn Gasanov Оперативная память
Оперативная память Пример (2)
Пример (2) Частотная гистограмма
Частотная гистограмма Теория и практика информационно-аналитической работы. Семинар 6 2018
Теория и практика информационно-аналитической работы. Семинар 6 2018 Установка windows xp
Установка windows xp Натуральная природа. Векторные картинки и иконки
Натуральная природа. Векторные картинки и иконки Моделирование
Моделирование Системные вызовы и адресация
Системные вызовы и адресация Лицензионные, условно-бесплатные и свободно распространяемые программы
Лицензионные, условно-бесплатные и свободно распространяемые программы Двухсвязные списки
Двухсвязные списки Презентация на тему Информация и знания
Презентация на тему Информация и знания  История развития вычислительной техники
История развития вычислительной техники Преобразование координат. Методическое указание для сотрудников УЗиМР
Преобразование координат. Методическое указание для сотрудников УЗиМР Работа с материалами в 3ds Max
Работа с материалами в 3ds Max Розробка системи автоматизованої перевірки (тестування) знань курсантів
Розробка системи автоматизованої перевірки (тестування) знань курсантів Лекция 1 - презентация
Лекция 1 - презентация ВКР: Автоматизация учета рабочего времени
ВКР: Автоматизация учета рабочего времени Аналитика BLS
Аналитика BLS День библиотек
День библиотек Презентация на тему Электронные таблицы
Презентация на тему Электронные таблицы  Соционика. Введение
Соционика. Введение